ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к измерительной технике, а именно к технике коррекции позиционных и угловых уходов навигационных систем выносных подвижных носителей, повышения точности определения координат выносных носителей, а также точности координат объектов (целей), обнаруженных измерительными средствами выносного носителя.
УРОВЕНЬ ТЕХНИКИ
Одной из основных функций навигационных систем является определение текущего местоположения движущегося объекта в пределах допустимого интервала погрешности и обеспечение данной информацией постоянно в режиме реального времени, так как текущее местоположение движущегося объекта используется для управления движением и восприятия окружающей среды по маршруту.
Ошибки определения местоположения движущегося объекта или выработка данной информации с перерывами могут вызвать серьезные нарушения безопасности движущегося объекта, поэтому очень важно точно определять текущее местоположение движущегося объекта.
Навигационные системы не всегда обеспечивают требуемую точность информации о текущем местоположении движущегося объекта. То есть погрешность датчиков, например гироскопа или электронного компаса, встроенных в движущийся объект, может быть значительной, особенно при изменениях направления движения объекта.
Кроме того, при использовании движущегося объекта в качестве носителя измерительного средства для освещения воздушной и надводной обстановки ошибки в определении местоположения самого движущегося объекта и смещение направления на север оси системы координат, формируемых его навигационной системой, приводят к тому, что при передаче координатной информации обнаруженных объектов на другой носитель, данные ошибки добавляются к ошибкам измерительного средства, что существенно снижает точность координатной информации.
При этом определение координат носителя, например летательного аппарата, обычно осуществляется относительно земной поверхности, а не относительно другого подвижного носителя. В результате при передаче с него координатной информации о цели на другой объект ошибки в определении координат цели на данном объекте увеличиваются за счет ошибок координатной информации и угловых уходов навигационных систем обоих носителей (относительных уходов навигационных систем).
Известен способ коррекции позиционной погрешности в навигационной системе по патенту, в соответствии с которым для повышения точности определения координат движущегося объекта определяют координаты текущего местоположения движущегося объекта на основе GPS/системы счисления пути, осуществляют коррекцию текущих координат с использованием поправки на смещение, осуществляют согласование с картой на основе использования скорректированных текущих координат, вычисляют отклонения поправочного угла для направления движения на основе измерения текущего поправочного угла. Затем осуществляют преобразование и коррекцию координат подвижного объекта на основе учета угла предыдущей поправки на смещение [1].
Недостатками данного способа является то, что он позволяет определять и корректировать только позиционные погрешности навигационной системы и не позволяет корректировать ее угловые уходы. Кроме того, для его реализации требуется наличие системы спутниковой навигации GPS, а определение погрешностей осуществляется относительно земной поверхности, а не относительно другого подвижного носителя. В результате при передаче с него координатной информации о цели на другой объект ошибки в определении координат цели на данном объекте увеличиваются за счет ошибок его координатной информации и угловых уходов навигационной системы (относительно другого носителя).
Известен способ определения координат летательного аппарата (ЛА) [2] по методу измерения дальностей, согласно которому на борту ЛА измеряют дальности ЛА до трех ориентирных точек, находящихся в зоне его прямой видимости. Измерение дальности осуществляют с помощью позиционного навигационного датчика, например бортового радиолокационного дальномера [3], по сигналам которого вычисляют координаты ЛА путем решения геометрических соотношений, носящих вид системы нелинейных алгебраических уравнений для приращений координат относительно опорной точки, которая решается итерационным способом.
Недостатком известного способа является то, что он не обеспечивает достаточно высокой точности измерения координат ЛА, необходимой, в частности, для выполнения захода на посадку и посадки, а также непрерывности измерения координат при срыве измерений дальности позиционным навигационным датчиком, например, при маневрировании ЛА. Кроме того, он не может использоваться при полете ЛА над безориентирной местностью, например над морем.
Известен способ определения координат летательного аппарата, по которому для повышения точности определения координат ЛА и обеспечения непрерывности оценок координат для их использования в комплексной системе управления полетом используют согласование измерений дальностей ЛА до группы наземных радиомаяков, находящихся в зоне его прямой видимости, с помощью позиционного навигационного датчика с оценками дальностей, получаемыми с помощью воспроизведения траектории ЛА путем решения дифференциальных уравнений его движения, в которые подставляются измерения бортовых датчиков ДУС, ДЛУ и курсовертикали. Способ позволяет определять координаты летательного аппарата при произвольной траектории полета с высокой точностью, необходимой, например, при заходе на посадку и при посадке, а также обеспечивает непрерывность определения координат при срыве измерений позиционного навигационного датчика, например, при маневрировании летательного аппарата [4].
Недостатком способа является необходимость наличия группы наземных радиомаяков. Кроме того, определение координат летательного аппарата осуществляется относительно земной поверхности, а не относительно другого подвижного носителя. В результате при передаче с него координатной информации о цели на другой объект ошибки в определении координат цели на данном объекте увеличиваются за счет ошибок его координатной информации и угловых уходов навигационной системы (относительно другого носителя).
Известен способ коррекции счисленных координат, при котором на каждом ЛА, находящемся в строю, измеряют параметры относительного местоположения ориентира с известными координатами, при помощи геометрических соотношений рассчитывают собственные координаты, формируют наблюдения как разность между составляющими счисленных координат и составляющими координат, рассчитанных по измеренным параметрам относительного местоположения ориентира с известными координатами, выполняют один шаг рекуррентной обработки наблюдений и получают оценки погрешностей счисленных составляющих координат для данного шага обработки, после выполнения L шагов рекуррентной обработки корректируют счисленные координаты путем вычитания из составляющих счисленных координат оценок их погрешностей, полученных на последнем шаге рекуррентной обработки, принимают откорректированные координаты в качестве опорной точки, относительно которой производят следующее счисление координат до момента последующей коррекции [5].
Недостатком этого способа является невозможность проведения коррекции при выполнении полета над безориентирной местностью. Кроме того, определение координат летательного аппарата осуществляется относительно земной поверхности, а не относительно другого подвижного носителя. В результате при передаче с него координатной информации о цели на другой объект ошибки в определении координат цели на данном объекте увеличиваются за счет ошибок его координатной информации и угловых уходов навигационной системы (относительно другого носителя).
Наиболее близким по технической сущности и достигаемому техническому результату (прототипом) является способ коррекции счисленных координат группы летательных аппаратов, согласно которому для повышение точности определения координат при полетах ЛА над безориентирной местностью на каждом ЛА, находящемся в строю, измеряют параметры относительного местоположения впереди летящего ближайшего ЛА, последовательно от одного конца строя к другому уточняют координаты каждого ЛА за счет выполнения рекуррентной обработки вектора наблюдения и передают их следующему ближайшему ЛА для уточнения координат последнего. Вектор наблюдения формируют как разность между вектором счисленных координат ЛА и вектором рассчитанных координат по измеренным или принятым параметрам относительного местоположения и составляющим скорости ЛА, а также принятым координатам ближайшего ЛА. Через определенное число шагов рекуррентной обработки на каждом ЛА, находящемся в строю, выполняют коррекцию счисленных координат и принимают откорректированные координаты в качестве опорной точки, относительно которой производят счисление координат до момента последующей коррекции [6 (прототип)].
Недостатками данного способа являются необходимость наличия строя летательных аппаратов, находящихся на малой дальности, и невозможность использования метода при полете одиночного летательного аппарата. Кроме того, данный способ позволяет осуществлять коррекцию только координатной информации летательного аппарата относительно других летательных аппаратов строя. Определение и коррекция угловых уходов навигационных систем летательных аппаратов данным способом не обеспечиваются.
ЗАДАЧИ И ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ
Целью (задачей) изобретения является обеспечение определения относительных позиционных и угловых уходов навигационных систем подвижных носителей на безориентирной местности при отсутствии возможности использования спутниковых навигационных систем, в том числе при невозможности взаимного наблюдения носителей их измерительными средствами (радиолокационными, оптико-электронными), что обеспечивает повышение точности координатной информации об объектах (целях), обнаруженных измерительными средствами на одном из носителей, при их передаче на второй носитель.
Технический результат, достигаемый при использовании изобретения, - повышение точности координатной информации об объектах (целях), обнаруженных измерительными средствами на одном из носителей, при ее передаче на второй носитель путем определение относительных позиционных и угловых уходов (поправок) навигационных систем, расположенных на выносном подвижном носителе и основном подвижном или неподвижном носителе. Это позволяет уточнить фактическое положение выносного носителя относительно основного и соответственно фактическое положение объектов (целей) в системе координат основного носителя, обнаруженных измерительными средствами выносного носителя, за счет компенсации в данных об их координатах ошибок, вызванных относительным уходом навигационной системы выносного носителя относительно навигационной системы основного носителя.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Поставленная задача решается, а требуемый технический результат достигается тем, что при определении относительных уходов навигационных систем подвижных носителей на каждом из носителей счисляют его координаты, осуществляют локацию и формирование координат одних и тех же объектов (целей) измерительными средствами выносного и основного носителя, передают координаты объектов (целей) и навигационные данные с выносного носителя на основной носитель, отождествляют координатную информацию по объектам (целям) от измерительных средств обоих носителей, вычисляют значения относительных позиционных поправок навигационной системы выносного носителя относительно основного и относительных угловых поправок навигационных систем обоих носителей, минимизирующих значения невязок координатной информации от измерительных средств обоих носителей по отождествленным объектам (целям) и навигационных данных обоих носителей.
При этом значения относительных позиционных и угловых поправок усредняются по результатам их определения за некоторый период времени.
Кроме этого дополнительно (при отсутствии отождествленных целей) осуществляют локацию и формирование координат основного и выносного носителей измерительными средствами выносного и основного носителей соответственно, передают координаты выносного носителя, формируемые его навигационной системой в момент локации основного носителя, и координаты основного носителя, измеренные измерительными средствами выносного носителя, на основной носитель, вычисляют значения относительных позиционных поправок навигационной системы одного носителя относительно другого и относительных угловых поправок навигационных систем обоих носителей, минимизирующих значения невязок координатной информации измерительных средств обоих носителей по серии измерений измерительными средствами и навигационными системами носителей.
При этом в качестве координат объектов (целей) используют данные об их местоположении в определенной системе координат, например широта и долгота, или поправки по широте и долготе к координатам известной реперной точки, или в прямоугольной системе координат с центром в известной реперной точке, или координаты в полярной системе координат (пеленг и дальность относительно носителя), параметры движения в виде курса и скорости или составляющих скорости в используемой системе координат, а в качестве основного носителя используют судно, летательный аппарат или береговой объект, а в качестве выносного носителя - судно или летательный аппарат, например вертолет.
Определяемые относительные позиционные поправки навигационной системы выносного носителя относительно основного и относительные угловые поправки навигационных систем обоих носителей минимизируют значения невязок и удовлетворяют принципу наименьших квадратов ошибок всех измерений.
Поставленная задача решается, а требуемый технический результат достигается также тем, что система для определения относительных уходов навигационных систем подвижных носителей включает соединенные средствами связи программно-аппаратные средства основного носителя, содержащие навигационную систему, измерительное средство, программно-аппаратные средства передачи данных, вычислительную систему, рабочее место оператора и программно-аппаратные средства выносного носителя, содержащие навигационную систему, измерительное средство и программно-аппаратные средства передачи данных, выполненные с возможностью
счисления навигационных данных (координат и параметров движения) каждого из носителей,
локации и формирования координат одних и тех же объектов (целей) измерительными средствами выносного и основного носителей,
передачи координат объектов (целей) и навигационных данных с выносного носителя на основной носитель,
отождествления координатной информации по объектам или целям от измерительных средств обоих носителей,
вычисления значений относительных позиционных поправок навигационной системы выносного носителя относительно основного и относительных угловых поправок навигационных систем обоих носителей, минимизирующих значения невязок координатной информации от измерительных средств обоих носителей по отождествленным объектам (целям) и навигационных данных обоих носителей.
При этом система выполнена с возможностью реализации описанного выше способа.
Иными словами, выполняют следующие операции: осуществляют локацию и формирование координат одних и тех же объектов или целей измерительными средствами выносного и основного носителя; передают координаты объектов (целей) и навигационные данные с выносного носителя на основной носитель; отождествляют координатную информацию по объектам или целям от измерительных средств обоих носителей; вычисляют значения относительных позиционных поправок навигационной системы выносного носителя относительно основного и относительных угловых поправок навигационных систем обоих носителей, минимизирующих значения невязок координатной информации от измерительных средств обоих носителей по отождествленным объектами (целям) и навигационных данных обоих носителей.
Изобретение может быть использовано в системах навигации, работающих при отсутствии возможности использования спутниковых навигационных систем ГЛОНАС, GPS и невозможности использования электронных навигационных карт, например в зонах мирового океана, в высоких широтах, при интенсивных естественных или искусственных помехах приему сигналов спутниковых навигационных систем. Кроме того, использование спутниковой навигационной системы не обеспечивает определение относительных угловых уходов навигационных систем носителей, формируемых при использовании предлагаемого изобретения.
При использовании выносного носителя для освещения обстановки в указанных условиях, формируемые его измерительными средствами (например, радиолокационными или оптико-электронными станциями) данные о координатах и параметрах движения объектов (целей) после передачи на основной носитель и пересчета в систему координат основного носителя содержат ошибки, обусловленные позиционными и угловыми уходами навигационной системы выносного носителя относительно навигационной системы основного носителя. Определение относительных позиционных и угловых уходов (поправок) навигационных систем основного и выносного носителей позволяет скомпенсировать данные составляющие ошибок в координатах и параметрах движения объектов или целей от измерительного средства выносного носителя.
Для достижения указанного технического результата в способе коррекции счисленных координат подвижных носителей, при котором на каждом из носителей счисляют его координаты, осуществляют локацию и формирование координат одних и тех же объектов (целей) измерительными средствами выносного и основного носителей, передают координаты объектов или целей и навигационные данные с выносного носителя на основной носитель, отождествляют координатную информацию по объектам (целям) от измерительных средств обоих носителей, вычисляют значения относительных позиционных поправок навигационной системы выносного носителя относительно основного и относительных угловых поправок навигационных систем обоих носителей, минимизирующих значения невязок координатной информации от измерительных средств обоих носителей по отождествленным объектами (целям) и навигационных данных обоих носителей.
Под координатами объектов (целей) понимаются данные об их местоположении в некоторой системе координат, например широта и долгота, либо поправки по широте и долготе к координатам известной реперной точки, либо в прямоугольной системе координат с центром в известной реперной точке, либо координаты в системе, связанной с носителем (пеленг и дальность относительно носителя), либо данные об их местоположении и параметры движения (курс и скорость либо составляющие скорости в используемой системе координат).
В качестве основного носителя может использоваться судно, летательный аппарат или береговой объект. В качестве выносного носителя может использоваться судно или летательный аппарат, например вертолет.
В рамках настоящей заявки используемые термины и определения означают следующее.
Навигационные системы - системы, обеспечивающие определение текущих координат носителя навигационной системы и направление осей его системы координат.
В качестве основного носителя может использоваться судно, летательный аппарат или береговой объект. В качестве выносного носителя может использоваться судно или летательный аппарат, например вертолет.
Уход навигационных систем - отклонение выдаваемых навигационной системой параметров от их фактического значения. В качестве параметров могут использоваться: координаты носителя географические или относительно некоторой реперной точки или объекта, а также направление на север оси системы координат, формируемой навигационной системой носителя.
Позиционный уход навигационных систем - отклонение выдаваемых навигационной системой координат носителя от их фактического значения.
Угловой уход навигационных систем - отклонение оси координат навигационной системы, направленной на север, от фактического направления на север.
Относительный уход навигационных систем - позиционный и угловой уход навигационной системы одного носителя относительно навигационной системы другого носителя.
Определение относительных позиционных и угловых уходов (поправок) навигационных систем - определение позиционных и угловых уходов навигационной системы одного носителя относительно навигационной системы другого носителя.
Коррекция позиционных и угловых уходов (поправок) навигационных систем - компенсация ошибок, вызванных уходами навигационных систем, в данных о позиционных и угловых параметрах объектов в системе координат носителя за счет учета поправок.
Основной носитель - носитель, принимающий информацию о координатах и параметрах выносного носителя и обнаруженных им объектах (целях).
Выносной подвижный носитель - носитель, передающий информацию о собственных координатах и координатах объектов (целей), сопровождаемых его измерительными средствами, на основной носитель.
Объекты (цели) - любые объекты, обнаруженные измерительными средствами носителя.
Невязки координатной информации от измерительных средств - расхождение по координатам целей, определенным различными измерительными средствами (в том числе расположенными на различных носителях), обусловленные ошибками измерения (в том числе относительными уходами навигационных систем носителей).
Отождествление - принятие решения о соответствии информационных пакетов с данными об объектах (целях) от измерительных средств основного и выносного носителей одному и тому же объекту (цели).
Отождествленные объекты (цели) - объекты (цели), обнаруженные измерительными средствами разных носителей, по которым принято решение, что они являются одним и тем же объектом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность изобретения поясняется чертежами, на которых изображены:
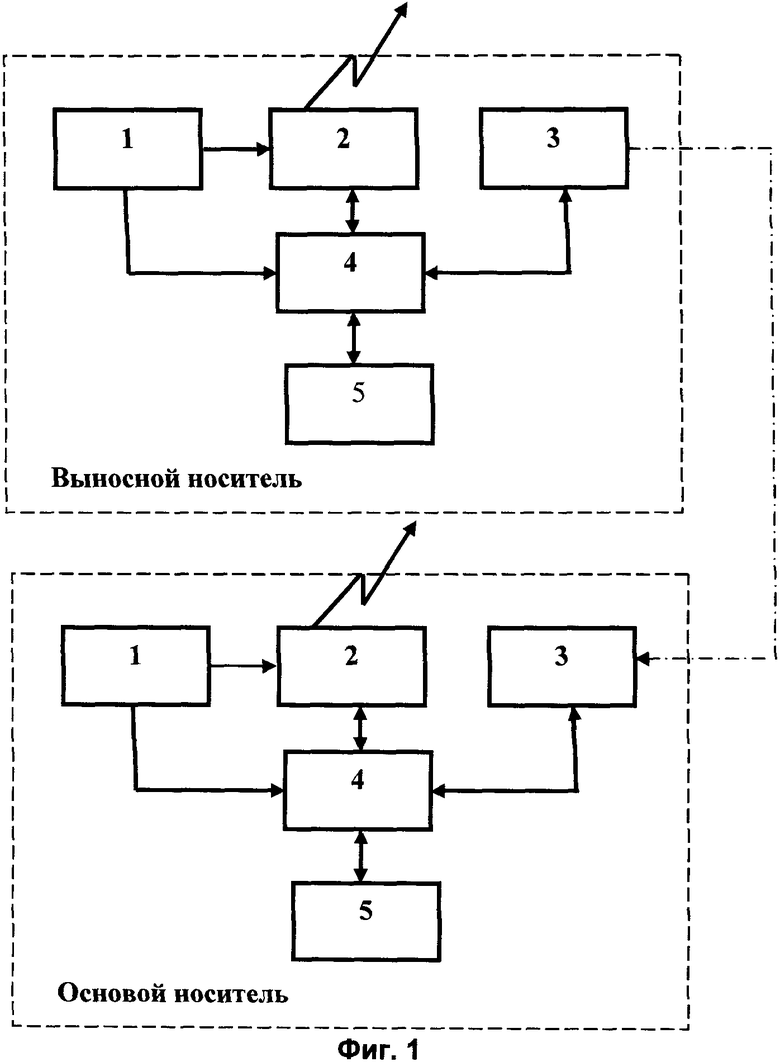
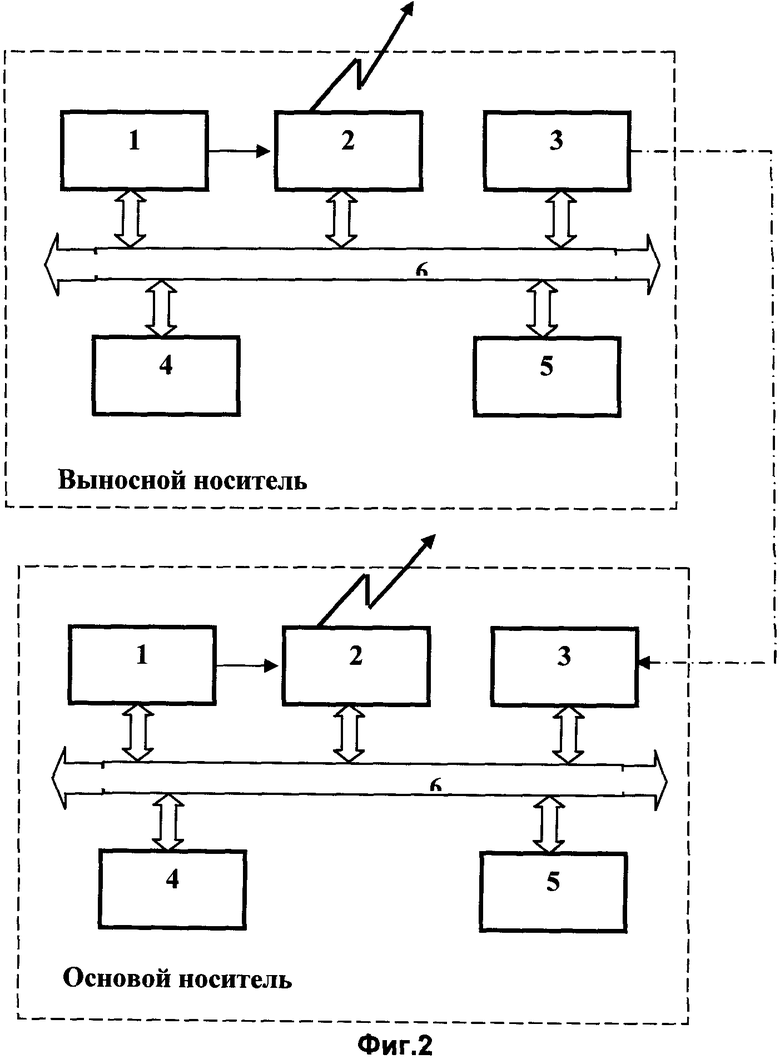
- на фиг.1, 2 структурно-функциональная блок-схема системы оборудования основного и выносного носителей;
- на фиг.3 схема использования предлагаемого способа.
Система для определения относительных уходов навигационных систем подвижных носителей преимущественно включает: аппаратуру основного носителя, содержащую навигационную систему 1, измерительное средство 2, аппаратуру передачи данных 3, вычислительную систему 4, рабочее место оператора 5, и аппаратуру выносного носителя, содержащую навигационную систему 6, измерительное средство 7, аппаратуру передачи данных 8.
В аппаратуре основного носителя навигационная система 1 соединена выходом с вычислительной системой 4 и измерительным средством 2, которое соединено с вычислительной системой 4, соединенной с аппаратурой передачи данных 3 и рабочим местом оператора 5.
В аппаратуре выносного носителя навигационная система 6 соединена выходом с измерительным средством 7 и аппаратурой передачи данных 8, соединенной с выходом измерительного средства 7.
Связь между аппаратурой передачи данных 3 основного носителя и 8 выносного носителя осуществляется по радиоканалу.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Изобретение иллюстрируется вариантом реализации предложенного способа при использовании в качестве основного носителя судна, а в качестве выносного носителя - вертолета.
В качестве навигационной системы 1, 6 в данном случае может использоваться инерциальная система любого типа, в частности для корабельных носителей может использоваться инерциальная навигационная система «Ладога-М» и ее модификации (см., например, [7]), а для авиационных носителей может использоваться пилотажно-навигационный комплекс, установленный на вертолете Ка-31 [8].
Измерительное средство 2 может представлять собой радиолокационную или оптико-электронную систему любого типа, обеспечивающую обнаружение и сопровождение целей, в частности для корабельного носителя в качестве радиолокационной системы могут использоваться существующие корабельные радиолокационные станции и комплексы [9]:
- корабельный многофункциональный радиоэлектронный комплекс «Позитив-МЭ» и его модификации;
- радиолокационная навигационная станция МР-212/201-1 и ее модификации;
- корабельная трехкоординатная радиолокационная станция «Фрегат-МА-Э» и ее модификации;
- судовые радиолокационные станции.
Для авиационных носителей может использоваться радиотехнический комплекс Е801, установленный на вертолете Ка-31 [10].
Аппаратура передачи данных 3 (8) представляет собой систему передачи данных по радиоканалу любого типа [11].
В качестве такой системы могут использоваться:
- автоматические комплексы связи «Буран-Э», «Буран-5КЭ», «Дистанция М3Э», «Рубин-3500-М1» и их модификации;
- комплекс технических средств передачи данных «Русич-4К» и его модификации;
- автоматизированные комплексы обмена информацией «Трасса» в различных модификациях [12];
- аппаратура передачи данных «Link» различных модификаций [13];
- бортовой комплекс связи, установленный на вертолете Ка-31 [14].
Вычислительная система 4 может выполняться в виде стандартного компьютера любого типа, например:
- промышленные компьютеры фирмы Fastwel IPC-SYS-1 (2), IPC-2U-SYS9, IS-SYS1-3, IS-4U-SYS5, IIS-2U-SYS7 [15];
- встраиваемые промышленные компьютеры фирмы Advantech серии UND-1000 (UND-1019, UND-1150G, UND-1170), серии UND-2000 (UND-2050G, UND-2053G, UND-2059G), серии UND-2100 (UND-2170, UND-2171, UND-2172, UND-2182), серий UND-3000, UND-4000 [16];
- встраиваемые компьютеры для жестких условий эксплуатации фирмы Advantech серий ARK-1000, ARK-3300, ARK-3400, ARK-5000 [17];
- специализированные многопроцессорные вычислительные комплексы [18];
или распределенной вычислительной системы, включающей несколько компьютеров, объединяемых сетью, например, Ethernet [19].
Рабочее место (пульт) оператора может представлять собой комплекс, включающий один или несколько вычислителей, средства отображения в виде мониторов и органы управления (клавиатура, трекбол, сенсорный экран).
Примером может являться автоматизированное рабочее место оператора, выпускаемое отечественными предприятиями, например АРМ оператора боевой информационно-управляющей системы «Требование-М» [20].
Возможна несколько иная организация оборудования носителя (см. фиг.2), при которой все составные части оборудования подключаются к единой сети, например, типа Ethernet, через которую осуществляют обмен данными.
Примером реализации требуемого оборудования авиационного выносного носителя может являться оборудование вертолета Ка-31 [21], включающее:
- измерительное устройство в виде радиолокационного комплекса типа Е801 «Око»;
- навигационную систему в виде пилотажно-навигационного комплекса;
- аппаратуру передачи данных в виде бортового комплекса связи.
Примером реализации оборудования основного или выносного корабельного носителя может являться оборудование корабля проекта 11356 [22], включающее:
- набор измерительных устройств в виде радиолокационных станций типа «Фрегат» и «Позитив», а также навигационных радиолокационных станций типа МР-212/201-1, Manta 2300 A/3/SU;
- вычислительную систему и автоматизированное рабочее место оператора в составе боевой информационно-управляющей системы «Требование-М»;
- навигационную систему типа «Ладога-М»;
- аппаратуру передачи данных типа Link-11.
Функционирование системы и реализация способа осуществляются следующим образом.
Навигационная система 1 основного носителя осуществляет счисление его координат, например в географической системе координат, и формирование значений курса и скорости и обеспечивает их выдачу в измерительное средство 2 и вычислительную систему 4.
Навигационная система 6 выносного носителя осуществляет счисление его координат, например в географической системе координат, и формирование значений курса и скорости и обеспечивает их выдачу в измерительное средство 7 и аппаратуру передачи данных 8.
Измерительные средства 2 и 7 обоих носителей осуществляют обзор пространства, обнаружение объектов (целей) и обеспечивают сопровождение обнаруженных объектов (целей) с формированием их координат и параметров движения, в том числе одних и тех же объектов (целей), обнаруженных и сопровождаемых измерительными средствами 2 и 7 обоих носителей, как показано на фиг.3.
Данные об объектах (целях) выдаются измерительным средством 2 основного носителя в вычислительную систему 4.
Данные об объектах (целях) выдаются измерительным устройством 7 выносного носителя в аппаратуру передачи данных 8, куда поступают также данные о координатах выносного носителя от его навигационной системы 6.
Аппаратура передачи данных выносного носителя формирует на основе информации, принимаемой от навигационной системы 6 и измерительного устройства 7, информационные пакеты с соответствующими данными о носителе и объектах (целях) и передает их на основной носитель.
Переданные информационные пакеты поступают в аппаратуру передачи данных 3 основного носителя, принимаются им и передаются в его вычислительную систему 4. Далее осуществляется отождествление данных об объектах (целях), сопровождаемых измерительными средствами 2 и 7 обоих носителей.
Отождествлением называется принятие решения о соответствии информационных пакетов с данными об объектах (целях) от измерительных средств основного и выносного носителей одному и тому же объекту (цели).
Отождествление может осуществляться вручную оператором основного носителя с использованием автоматизированного рабочего места 5 в следующем порядке. Вычислительная система выдает в автоматизированное рабочее место данные об объектах (целях), принятые от измерительных средств обоих носителей, которые отображаются на индикаторе автоматизированного рабочего места.
Оператор, наблюдая картину тактической обстановки по данным обоих измерительных средств 2 и 7, принимает решения о тождественности ряда объектов (целей), сопровождаемых измерительными средствами обоих носителей, и вводит соответствующую информацию об их отождествлении в вычислительную систему 4 с использованием органов управления автоматизированного рабочего места 5, например, путем ввода пар номеров объектов (целей) от измерительных средств 2 и 7 основного и выносного носителей либо «скалыванием» обоих отметок с индикатора автоматизированного рабочего места с использованием трекбола.
Операция отождествления может также выполняться автоматически в вычислительной системе 4 основного носителя. Алгоритмы автоматического решения данной задачи описаны, например, в [23].
Далее в вычислительной системе 4 основного носителя формируются два массива данных об отождествленных объектах (целях), на основе навигационных данных обоих носителей определяется разница х и у по осям ОХ и OY между началами систем координат носителей, например, способом, описанным в [24], и решается задача вычисления относительных позиционных и угловых уходов навигационных систем основного и выносного носителей.
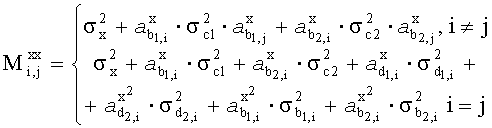
Вычисление производится в следующем порядке.
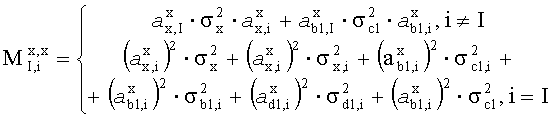
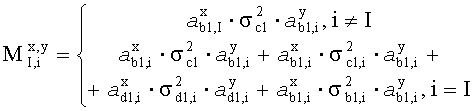
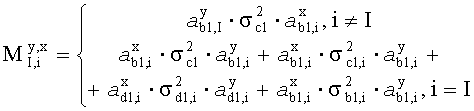
Находятся решения kx,i, ky,i (
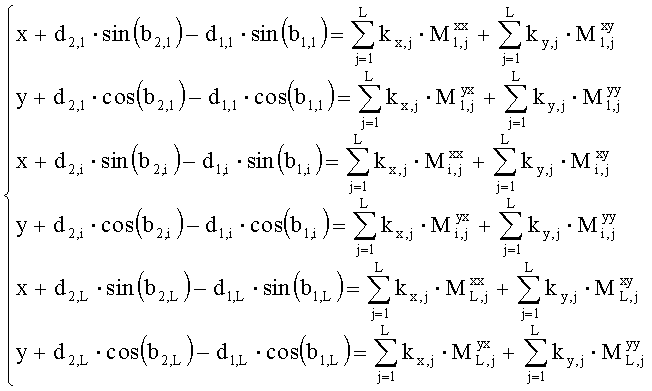
где L - количество отождествленных объектов (целей);





b1,i, d1,i - пеленг и дистанция до i-го объекта (цели), определенные измерительным средством основного носителя (в его системе координат);
b2,i, d2,i - пеленг и дистанция до i-го объекта (цели), определенные измерительным средством выносного носителя (в его системе координат);
х, y - разница между началами систем координат носителей по осям ОХ и OY соответственно, найденная на основе навигационных данных основного и выносного носителей;




σx, σy - среднеквадратические погрешности определения величин х и y соответственно;
σc1, σc2 - среднеквадратические погрешности определения ориентации систем координат (направлений на север, курсов) навигационными системами основного и выносного носителей соответственно;


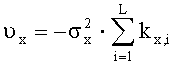
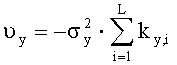
Определяются относительные позиционные поправки по осям ОХ и OY:
и относительные угловые поправки навигационных систем обоих носителей:


Определенные таким образом значения поправок минимизируют значения невязок и удовлетворяют принципу наименьших квадратов ошибок всех измерений.
Вычисленные значения относительных уходов могут использоваться для корректировки данных об объектах (целях), обнаруженных измерительными средствами 7 выносного носителя, переданных на основной носитель, путем учета соответствующих поправок в данных о координатах объектов (целей). Это позволяет:
- получить более точные данные о положении выносного носителя относительно основного;
- уменьшить ошибки данных о координатах и параметрах движения объектов (целей), сопровождаемых измерительными средствами выносного носителя, на основном носителе.
С целью оценки достигаемого положительного эффекта при использовании заявляемого технического решения проводилось моделирование для описанного выше примера его реализации.
При моделировании использовались следующие исходные данные, соответствующие характеристикам реальных изделий:




Распределение целей и выносного носителя выбиралось по площади квадрата с длиной стороны 30000 м и центром в точке основного носителя.
По результатам моделирования при сопровождении 4…7 целей источниками обоих носителей использование поправок позволяет уменьшить среднеквадратическую погрешность выработки относительного местоположения до величины 0,03…0,17 от значения погрешности без применения рассмотренного способа, а среднеквадратическую погрешность по относительной ориентации - до величины 0,08…0,17.
Для повышения точности определения поправок вычисленные значения могут усредняться за несколько циклов их определения.
В случае способа по п.2 формулы изобретения в процессе взаимной локации измерительными средствами основного и выносного носителей соответственно выносного и основного носителей определяются их координаты, кроме того, на каждом из носителей счисляются навигационной системой их текущие координаты:





N - количество локаций выносного носителя, выполненных измерительным средством основного носителя;
L - количество локаций основного носителя, выполненных измерительным средством выносного носителя.
Измеренные на выносном носителе координаты основного носителя и счисленные его навигационной системой координаты выносного носителя передаются на основной носитель. На основном носителе с использованием навигационных данных обоих носителей определяются (например, способом, описанным в [24]):
xi, yi - координаты выносного носителя относительно основного носителя по данным навигационных систем обоих носителей в момент определения 

xj, yj - координаты выносного носителя относительно основного носителя по данным навигационных систем обоих носителей в момент определения 

где
На основе принятых от выносного носителя данных и данных, сформированных на основном носителе, производится расчет относительных позиционных поправок навигационной системы выносного носителя относительно основного и относительных угловых поправок навигационных систем обоих носителей в следующем порядке.
Находятся решения kx,i, ky,i, kx,j и ky,j (
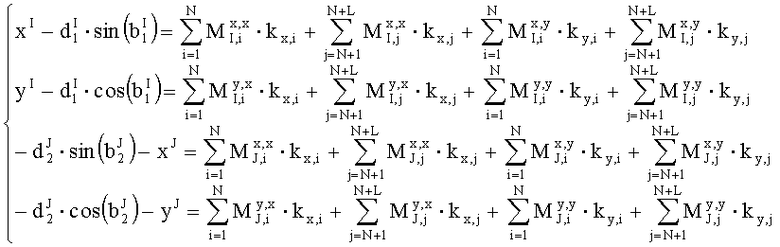
где N - количество локаций выносного носителя, выполненных измерительным средством основного носителя;
L - количество локаций основного носителя, выполненных измерительным средством выносного носителя;


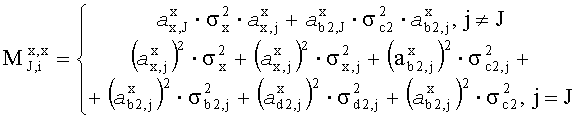
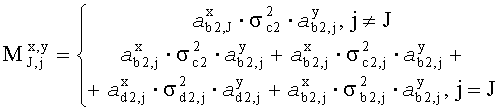
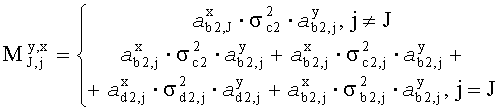
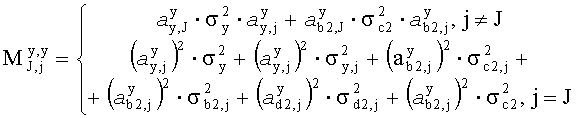

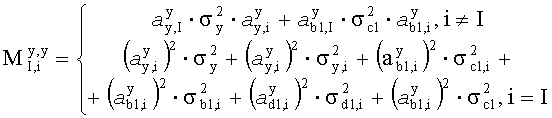







xi, yi - координаты выносного носителя относительно основного носителя по данным навигационных систем обоих носителей в момент определения 

σd1,i - среднеквадратическая погрешность определения
σb1,i - среднеквадратическая погрешность определения
σy,i - среднеквадратическая погрешность случайной составляющей ошибки определения yi;
σx,i - среднеквадратическая погрешность случайной составляющей ошибки определения xi;
σc1,i - среднеквадратическая погрешность случайной составляющей ошибки определения курса основного носителя в момент определения


xj, yj - координаты выносного носителя, относительно основного носителя по данным навигационных систем обоих носителей в момент определения 

σd2,j - среднеквадратическая погрешность определения 
σb2,j - среднеквадратическая погрешность определения 
σy,j - среднеквадратическая погрешность случайной составляющей ошибки определения yj;
σx,j - среднеквадратическая погрешность случайной составляющей ошибки определения xj;
σc2,j - среднеквадратическая погрешность случайной составляющей ошибки определения курса выносного носителя в момент определения
σx - среднеквадратическая погрешность квазисистематической (постоянной в течение рассматриваемого временного интервала) составляющей ошибки определения расстояния между носителями по данным их навигационных систем по оси ОХ;
σy - среднеквадратическая погрешность квазисистематической (постоянной в течение рассматриваемого временного интервала) составляющей ошибки определения расстояния между носителями по данным их навигационных систем по оси OY;
σc1 - среднеквадратическая погрешность квазисистематической (постоянной в течение рассматриваемого временного интервала) составляющей ошибки определения курса основного носителя;
σc2 - среднеквадратическая погрешность квазисистематической (постоянной в течение рассматриваемого временного интервала) составляющей ошибки определения курса выносного носителя.
Определяются относительные позиционные поправки по осям ОХ и OY:


и относительные угловые поправки навигационных систем обоих носителей:


Определенные таким образом значения поправок минимизируют значения невязок и удовлетворяют принципу наименьших квадратов ошибок всех измерений.
С целью оценки достигаемого технического результата при использовании заявляемого технического решения проводилось моделирование для описанного выше примера его реализации.
При моделировании использовались следующие исходные данные, соответствующие характеристикам реальных изделий:
σd1,i=σd2,j=100 м,
σb1,i=σb2,j=0,5 град,
σx,1=σy,i=σx,j=σy,j=50 м,
σc1,i=σc2,j=0,1 град,
σс1=σс2=1,0 град,
σx=σy=1500 м.
Относительное местоположение выносного носителя - случайная точка в квадрате с длиной стороны 30000 м и центром в точке основного носителя.
Относительные курсы - случайным образом (от 0 до 360 град).
Относительная скорость - 220 м/с.
При выполнении 10 локаций измерительными средствами каждого носителя (с периодом 5 секунд) достигается следующий положительный эффект:
- уменьшение среднеквадратической погрешности выработки относительного местоположения до величины 0,095 от значения без применения рассмотренного способа;
- уменьшение среднеквадратической погрешности по относительной ориентации до величины 0,46 от значения до применения рассмотренного способа.
При выполнении 7 локаций измерительными средствами каждого носителя (с периодом 5 секунд) достигается следующий положительный эффект:
- уменьшение среднеквадратической погрешности выработки относительного местоположения до величины 0,11 от значения без применения рассмотренного способа;
- уменьшение среднеквадратической погрешности по относительной ориентации до величины 0,55 от значения до применения рассмотренного способа.
При выполнении 4 локаций измерительными средствами каждого носителя (с периодом 5 секунд) достигается следующий положительный эффект:
- уменьшение среднеквадратической погрешности выработки относительного местоположения до величины 0,13 от значения без применения рассмотренного способа;
- уменьшение среднеквадратической погрешности по относительной ориентации до величины 0,67 от значения до применения рассмотренного способа.
Таким образом, все существенные признаки способа и системы обеспечивают достижения технического результата и находятся в причинно-следственной связи с ним, а именно:
- счисление координат носителей их навигационными системами обеспечивает формирование на каждом из них системы координат, в которой измеряются и формируются измерительными средствами координаты объектов (целей);
- измерительные средства обеспечивают измерение координат объектов (целей) в системе координат соответствующего носителя, в том числе ряда объектов (целей), наблюдаемых измерительными средствами обоих носителей;
- аппаратура передачи данных обеспечивает передачу с выносного носителя данных о его координатах и координатах объектов (целей), обнаруженных его измерительными средствами;
- все данные о координатах основного и выносного носителей и координатах и параметрах движения обнаруженных их измерительными средствам объектов (целей) поступают в вычислительную систему, обеспечивающую их обработку;
- принятие решения об отождествлении (оператором вручную или в вычислительной системе на основе известного алгоритма) ряда целей, обнаруженных измерительными средствами обоих носителей, позволяет определить относительные позиционные поправки навигационной системы выносного носителя относительно основного и относительные угловые поправки навигационных систем обоих носителей, минимизирующие значения невязок координатной информации от измерительных средств обоих носителей по отождествленным объектам (целям) и навигационных данных обоих носителей.
Данные поправки позволяют рассчитывать координаты объектов (целей), обнаруженных измерительными средствами выносного носителя, в системе координат основного носителя с более высокой точностью.
В качестве вариантов исполнения отдельных элементов системы для реализации способа могут быть использованы различные известные в навигационной технике технологии, материалы и оборудование.
Таким образом, учитывая новизну совокупности существенных признаков, техническое решение поставленной задачи, изобретательский уровень и существенность всех общих и частных признаков изобретения, доказанных в разделе «Уровень техники» и «Сущность изобретения», доказанную в разделе «Осуществление изобретения» техническую осуществимость и промышленную применимость изобретения, решение поставленных изобретательских задач и уверенное достижение требуемого технического результата при реализации и использовании изобретения, по мнению авторов, заявленная группа изобретений удовлетворяет всем требованиям охраноспособности, предъявляемым к изобретениям.
Проведенный анализ показывает также, что все общие и частные признаки изобретения являются существенными, так как каждый из них необходим, а все вместе они не только достаточны для достижения цели изобретения, но и позволяют реализовать изобретение промышленным способом.
Кроме этого анализ совокупности существенных признаков изобретения и достигаемого при их использовании единого технического результата показывает наличие единого изобретательского замысла, тесную и неразрывную связь между способом и системой для его осуществления. Это позволяет объединить изобретения в одной заявке, то есть обеспечить требования критерия единства изобретения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. RU 2254558, G01C 21/00, опубл. 20.06.2005.
2. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991, с.171, 185-188.
3. Радиолокационные измерители дальности и скорости. Том 1. Под ред. В.Н.Саблина. - М.: Радио и связь, 1999, с.146, 150.
4. RU 2264598, G01C 23/00, опубл. 20.11.2005.
5. Молоканов Г.Ф. Автоматизация самолетовождения и комплексные навигационные системы. - Монино: Изд-во ВВА им. Ю.А.Гагарина, 1977, с.124-145.
6. RU 2091713, G01C 23/00, опубл. 27.09.1997 (прототип).
7. Пешехонов В.Г., Шарыгин Б.Л., Миронов Ю.В. Единая система инерциальной навигации и стабилизации «Ладога-М» // Морская радиоэлектроника. - 2003. - №1 (4). - С.26-30.
8. http//www. airwar.ru/enc/sh/ka31/html, http//www.wiki.airforce.ru/index.php?title, http//www. Arms-expe.ru.
9. Морская радиоэлектроника: Справочник / И.В.Соловьев, Г.Н.Корольков, А.А.Бараненко и др., под ред. В.А.Кравченко. - СПб.: Политехника, 2003. - С.29-32, 34-36, 39-41, 216-218.
10. http//www. airwar.ru/enc/sh/ka31/html, http//www.wiki.airforce.ru/index.php?title, http//www.Arms-expe.ru.
11. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А Бараненко и др., под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - С.112-154.
12. Стратонов Л.В. Автоматизированные комплексы обмена информацией. Изделия ОКР «Трасса» / Научно-технический журнал «Автоматизация процессов управления», №2 (8), 2006 г., с.13-16.
13. Быков И. Разработка АСУ и информационных технологий в ВМС США / Зарубежное военное и. обозрение, 2000 г., №12.
14. http//www.airwar.ru/enc/sh/ka31/html, http//www. wiki.airforce.ru/index.php?title, http//www. Arms-expe.ru.
15. Краткий каталог продукции ProSoft. -СПб., 2011/12 (160). - С.1.1-1.4.
16. Краткий каталог продукции ProSoft. - СПб., 2011/12 (160). - С.2.2-2.3.
17. Краткий каталог продукции ProSoft. -СПб., 2011/12 (160). - С.2.4-2.5.
18. Севбо В., Орлов А., Лошаков А. Многопроцессорный вычислительный комплекс Ikx задач «жесткого» реального времени / Современные технологии автоматизации, №3, 2007, с.32-38.
19. Копанев А.А., Музыченко О.Н. Модернизированная боевая информационно-управляющая система «Требование-М» - система нового поколения // Сборник докладов научно-технической конференции «Состояние, проблемы и перспективы создания корабельных информационно-управляющих комплексов (эффективность, надежность, экономика)». - М.: ОАО «Концерн «Моринформсистема-Агат», 2011. - С.27-31.
20. Морская радиоэлектроника: Справочник / И.В.Соловьев, Г.Н.Корольков, А.А.Бараненко и др., под ред. В.А.Кравченко. - СПб.: Политехника, 2003. - С.91-92; или Копанев А.А., Музыченко О.Н. Новый этап в развитии БИУС «Требование-М» // Морская радиоэлектроника, 2011, №2 (36). - С.17-23; или боевой информационно-управляющей системы «Сигма-Э» (см. Морская радиоэлектроника: Справочник / И.В.Соловьев, Г.Н.Корольков, А.А.Бараненко и др., под ред. В.А.Кравченко. - СПб.: Политехника, 2003. - С.88-90; или Н.Н.Батарин и др. Концепция построения переносного унифицированного АРМ / Научно-технический журнал «Автоматизация процессов управления», №2 (8), 2006 г., с.44-50.
21. http://www. airwar.ru/enc/sh/ka31.html, http//www.wiki.airforce.ru/index.php?title, http//www.Arms-expe.ru.httl.
22. «Новый этап в развитии БИУС «Требование-М» / Копанев А.А., Музыченко О.Н. Морская радиоэлектроника, 2011, №2 (36). - С.17-23, информационные ресурсы http//www.army-news.ru/2011/03/fregat 1356/httl, http//www.topwar.ru/3632.russkie-fregaty-proekt-11356-html.
23. Савченко Д.И. Задача отождествления данных в системах освещения обстановки // Итоги диссертационных исследований. Том 3. - Материалы III Всероссийского конкурса молодых ученых. - М.: РАН, 2011. - С.149-159.
24. Морозов В.П. Курс сфероидической геодезии. Изд. 2. - М.: Недра, 1979. - 296 с.
25. Гантмахер Ф.Р. Теория матриц. - М.: Наука, 1967. - 576 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| Автоматизированная система навигации с контролем аномальных измерений координат от спутниковых радионавигационных систем | 2022 |
|
RU2783480C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе | 2023 |
|
RU2816259C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634071C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации механического и доплеровского датчиков скорости | 2016 |
|
RU2640312C2 |
| КОМПЛЕКС НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2003 |
|
RU2238522C1 |
Изобретение относится к измерительной технике, а именно к технике коррекции позиционных и угловых относительных уходов навигационных систем (ОУНС) выносных подвижных носителей (ВН), повышения точности определения координат ВН, а также точности координат объектов, обнаруженных измерительными средствами (ИС) ВН. Для определения ОУНС ПН на каждом из носителей (Н) счисляют его координаты, осуществляют локацию и формирование координат одних и тех же объектов ИС ВН и основного носителя (ОН), передают координаты объектов и навигационные данные с ВН на ОН, отождествляют координатную информацию по объектам от ИС обоих Н, вычисляют значения относительных позиционных поправок навигационной системы (НС) ВН относительно основного и относительных угловых поправок НС обоих Н, минимизирующих значения невязок координатной информации от ИС обоих Н по отождествленным объектам и навигационных данных обоих Н. Система для определения ОУПНС ПН включает соединенные средствами связи программно-аппаратные средства ОН, содержащие НС, ИС, программно-аппаратные средства (ПАС) передачи данных, вычислительную систему, рабочее место оператора и ПАС ВН, содержащие НС, измерительное средство и ПАС передачи данных, выполненные с возможностью счисления навигационных данных каждого из Н, локации и формирование координат одних и тех же объектов ИС ВН и ОН, передачи координат объектов и навигационных данных с ВН на ОН, отождествления координатной информации по объектам от ИС обоих Н, вычисления значений относительных позиционных поправок НС ВН относительно ОН и относительных угловых поправок ухода навигационных систем обоих Н, минимизирующих значения невязок координатной информации от измерительных средств обоих Н по отождествленным объектам и навигационных данных обоих Н. 2 н. и 6 з.п. ф-лы, 3 ил.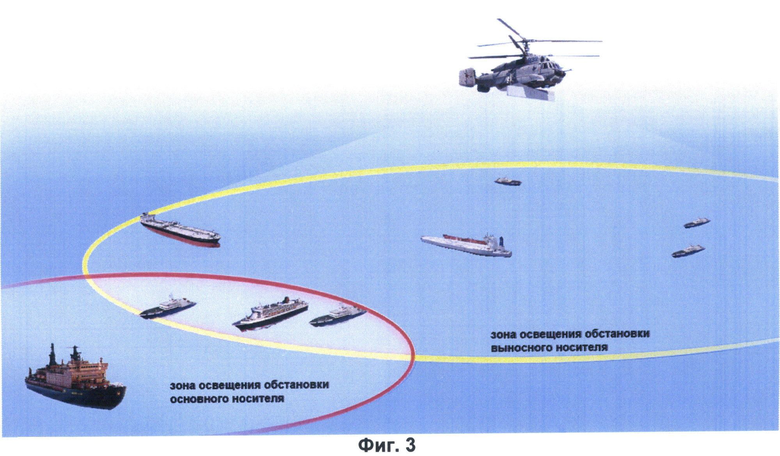
1. Способ определения относительных уходов навигационных систем подвижных носителей, отличающийся тем, что
на каждом из носителей счисляют его координаты,
осуществляют локацию и формирование координат одних и тех же объектов измерительными средствами выносного и основного носителей,
передают координаты объектов и навигационные данные с выносного носителя на основной носитель,
отождествляют координатную информацию по объектам от измерительных средств обоих носителей,
вычисляют значения относительных позиционных поправок навигационной системы выносного носителя относительно основного и относительных угловых поправок навигационных систем обоих носителей, минимизирующих значения невязок координатной информации от измерительных средств обоих носителей по отождествленным объектам и навигационных данных обоих носителей.
2. Способ по п.1, отличающийся тем, что значения относительных позиционных и угловых поправок усредняются по результатам их определения за определенный период времени.
3. Способ по п.1, отличающийся тем, что
при отсутствии отождествленных целей дополнительно осуществляют локацию и формирование координат основного и выносного носителей измерительными средствами выносного и основного носителей соответственно,
передают координаты выносного носителя, формируемые его навигационной системой в момент локации основного носителя, и координаты основного носителя, измеренные измерительными средствами выносного носителя, на основной носитель,
вычисляют значения относительных позиционных поправок навигационной системы одного носителя относительно другого и относительных угловых поправок навигационных систем обоих носителей, минимизирующих значения невязок координатной информации измерительных средств обоих носителей по серии измерений измерительными средствами и навигационными системами носителей.
4. Способ по п.1, отличающийся тем, что в качестве координат объектов используют данные об их местоположении в определенной системе координат, например широта и долгота, или поправки по широте и долготе к координатам известной реперной точки, или в прямоугольной системе координат с центром в известной реперной точке, или координаты в системе, связанной с пеленгом и дальностью относительно носителя, или данные об их местоположении, параметры движения в виде курса и скорости или составляющие скорости в используемой системе координат.
5. Способ по п.1, отличающийся тем, что в качестве основного носителя используют судно, летательный аппарат или береговой объект, а в качестве выносного носителя - судно или летательный аппарат, например вертолет.
6. Способ по п.1, отличающийся тем, что определяемые относительные позиционные поправки навигационной системы выносного носителя относительно основного и относительные угловые поправки навигационных систем обоих носителей минимизируют значения невязок и удовлетворяют принципу наименьших квадратов ошибок всех измерений.
7. Система для определения относительных уходов навигационных систем подвижных носителей, отличающаяся тем, что
включает
соединенные средствами связи
программно-аппаратные средства основного носителя, содержащие навигационную систему, измерительное средство, программно-аппаратные средства передачи данных, вычислительную систему, рабочее место оператора, и
программно-аппаратные средства выносного носителя, содержащие навигационную систему, измерительное средство и программно-аппаратные средства передачи данных,
выполненные с возможностью
счисления навигационных данных каждого из носителей,
локации и формирования координат одних и тех же объектов измерительными средствами выносного и основного носителей,
передачи координат объектов и навигационных данных с выносного носителя на основной носитель,
отождествления координатной информации по объектам от измерительных средств обоих носителей,
вычисления значений относительных позиционных поправок навигационной системы выносного носителя относительно основного и относительных угловых поправок навигационных систем обоих носителей, минимизирующих значения невязок координатной информации от измерительных средств обоих носителей по отождествленным объектам и навигационных данных обоих носителей.
8. Система по п.7, отличающаяся тем, что выполнена с возможностью реализации способа по любому из пп.1-6,
| СПОСОБ КОРРЕКЦИИ СЧИСЛЕННЫХ КООРДИНАТ ГРУППЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2091713C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2264598C1 |
| СПОСОБ КОРРЕКЦИИ ПОЗИЦИОННОЙ ПОГРЕШНОСТИ В НАВИГАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2254558C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |

