Изобретение относится к измерительным комплексам и системам летательных аппаратов (ЛА) - самолетов и вертолетов.
В наиболее близком аналоге, приведенном в книге [1], представлена комплексная система (КС) летательного аппарата, включающая в себя бортовые обзорно-прицельные средства обнаружения и сопровождения целей, базовую навигационную систему, вычислитель, блок хранения информации. Летчик пилотирует ЛА так, чтобы бортовые обзорно-прицельные средства захватили оперативную наземную цель. После этого начинается процесс определения ее параметров, в частности координат местоположения, заключающийся в том, что на основе информации о координатах ЛА, формируемых базовой навигационной системой, и относительных координатах цели относительно ЛА, формируемых обзорно-прицельными средствами (как правило, такими параметрами являются наклонная дальность, измеряемая дальномером, и углы визирования цели, определяемые с помощью визирной системы, например, оптико-локационной станции (ОЛС), радиолокационной станции (РЛС)), в вычислителе рассчитываются координаты оперативной цели относительно выбранной земной системы координат. Полученные значения координат оперативной цели запоминаются в блоке хранения информации и могут использоваться в дальнейшем для решения различных специальных задач. После определения и запоминания параметров одной оперативной цели система готова к работе по следующей цели и при желании экипажа может вышеописанным способом приступать к определению ее параметров.
Наиболее близкий аналог имеет существенный недостаток, заключающийся в том, что точность определения параметров оперативной цели будет зависеть от точности определения относительных координат цели относительно ЛА с помощью обзорно-прицельных средств и от точности определения координат ЛА с помощью базовой навигационной системы на момент их использования. При этом точности этих систем различны: если точность обзорно-прицельных средств достаточно высока, то ошибки определения координат ЛА с помощью базовой навигационной системы, в качестве которой зачастую выступает автономная инерциальная навигационная система, довольно значительны и могут достигать нескольких километров. Это означает, что погрешности привязки оперативных целей к местности будут составлять такие же величины, в частности те же несколько километров.
Задачей изобретения является расширение функциональных возможностей КС ЛА путем коррекции полученных таким образом параметров оперативных целей за счет использования дополнительной внешней информации о параметрах движения ЛА, полученных в дальнейшем от других систем и, как следствие этого, повышение боевой эффективности использования объектов, снабженных такой системой.
Достигается указанный результат тем, что комплексная система, содержащая базовую навигационную систему, блок обзорно-прицельных средств обнаружения и сопровождения целей, блок расчета параметров оперативных целей, блок хранения первичных параметров оперативных целей, дополнительно снабжена блоком корректирующих средств, блоком формирования измерений, блоком сглаживающих фильтров, блоком расчета корректирующих поправок, блоком коррекции параметров оперативных целей, блоком хранения уточненных параметров оперативных целей. При этом выход базовой навигационной системы подключен к первому входу блока расчета параметров оперативных целей, выход блока обзорно-прицельных средств подключен ко второму входу блока расчета параметров оперативных целей, выход которого подключен ко входу блока хранения первичных параметров оперативных целей, выход блока корректирующих средств подключен ко второму входу блока формирования измерений, к первому входу которого подключен выход базовой навигационной системы, выход блока формирования измерений подключен к входу блока сглаживающих фильтров, выход блока сглаживающих фильтров подключен ко входу блока расчета корректирующих поправок, выход блока корректирующих поправок подключен ко второму входу блока коррекции параметров оперативных целей, к первому входу которого подключен выход блока хранения первичных параметров оперативных целей, выход блока коррекции параметров оперативных целей подключен ко входу блока хранения уточненных параметров оперативных целей, выход которого является выходом комплексной системы определения параметров оперативных целей.
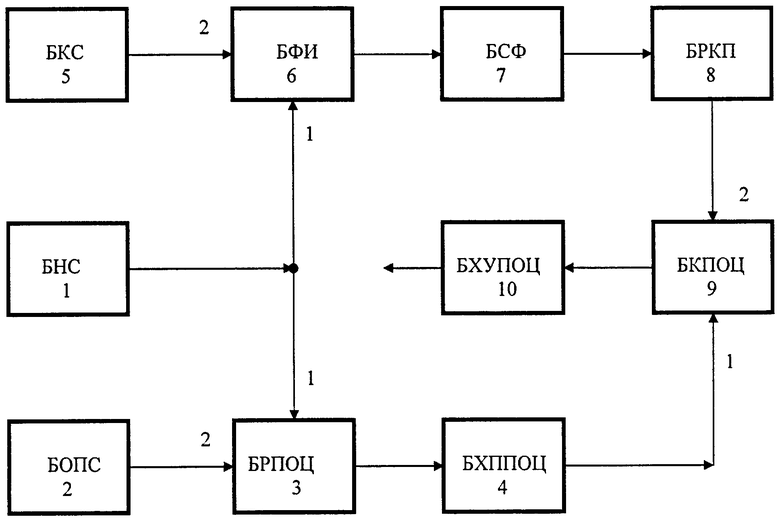
На чертеже представлена блок-схема комплексной системы определения параметров оперативных целей (КСОПОЦ) ЛА, содержащей:
1 - базовую навигационную систему БНС;
2 - блок обзорно-прицельных средств БОПС;
3 - блок расчета параметров оперативных целей БРПОЦ;
4 - блок хранения первичных параметров оперативных целей БХППОЦ;
5 - блок корректирующих средств БКС;
6 - блок формирования измерений БФИ;
7 - блок сглаживающих фильтров БСФ;
8 - блок расчета корректирующих поправок БРКП;
9 - блок коррекции параметров оперативных целей БКПОЦ;
10 - блок хранения уточненных параметров оперативных целей БХУПОЦ.
Информационная взаимосвязь блоков КСОПОЦ осуществляется по линиям информационного обмена (на чертеже обозначены тонкой сплошной линией).
Выход блока БНС 1 подключен к первому входу блока БФИ 6 и к первому входу блока БРПОЦ 3, выход блока БОПС 2 подключен к второму входу блока БРПОЦ 3, выход блока БКС 5 подключен ко второму входу блока БФИ 6, выход блока БФИ 6 подключен ко входу блока БСФ 7, выход блока БСФ 7 подключен ко входу блока БРКП 8, выход блока БРКП 8 подключен ко второму входу блока БКПОЦ 9. Выход блока БРПОЦ 3 подключен ко входу блока БХППОЦ 4, выход блока БХППОЦ 4 подключен к первому входу блока БКПОЦ 9, выход блока БКПОЦ 9 подключен ко входу блока БХУПОЦ 10, выход которого является выходом комплексной системы определения параметров оперативных целей.
Блок БНС 1 представляет собой известные, описанные в литературе, например [3], стр.6-9, 301-374, [4], стр.110-120, средства: инерциальная навигационная система (ИНС), бесплатформенная ИНС (БИНС), курсовоздушная навигационная система. Блок БНС 1 осуществляет определение параметров движения ЛА: координат, скорости, углов ориентации.
Блок БОПС 2 представляет собой известные, описанные в литературе, например [1], стр.358-375, средства: оптико-локационная станция (ОЛС), тепловизионная станция с автоматическим сопровождением цели (ТВС), радиолокационная станция (РЛС), радио- или оптический дальномер. Блок БОПС 2 осуществляет обнаружение в пространстве цели, ее захват и автоматическое сопровождение, при этом определяются параметры относительных координат цели относительно ЛА (например, в виде дальности D до цели и углов φу и φz поворота линии визирования относительно нормальной и боковой осей ЛА соответственно), которые подаются на вход БРПОЦ 3.
Блок БКС 5 представляет собой известные, описанные в литературе, например [3], стр.9-15, средства: спутниковая навигационная система (СНС), радионавигационная система ближней навигации (РСБН), радионавигационная система дальней навигации (РСДН). Блок БКС 5 осуществляет определение параметров движения ЛА (координат, скорости) с точностью, существенно лучшей, чем точность аналогичных определений, выполненных с помощью БНС 1, однако не всегда, а только при наличии благоприятных условий, например, отсутствие внешних шумов, наличие устойчивой связи с источниками радионавигационных сигналов.
Блоки БХППОЦ 4 и БХУПОЦ 10 выполнены в виде, например, оперативного или постоянного запоминающего устройства ([2], стр.30). Блоки БРПОЦ 3, БФИ 6, БСФ 7, БРКП 8, БКПОЦ 9 выполнены, например, в виде однопроцессорных вычислителей ([2], стр.31).
Информационные линии связи представляют собой известные (описанные, например, в книге [2], стр.21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
КСОПОЦ работает следующим образом.
При захвате на сопровождение оперативной цели блок БОПС 2 осуществляет точное определение относительных координат цели относительно ЛА и автоматическое слежение за целью, при этом относительные координаты непрерывно уточняются. Эти относительные координаты, например, в виде дальности D до цели и углов φу и φz поворота линии визирования цели, поступают на второй вход блока БРПОЦ 3. На первый вход блока БРПОЦ 3 из блока БНС 1 поступают значения координат ЛА, например, в виде величин долготы λ, широты φ и высоты Н, которые определены с некоторыми погрешностями Δλ, Δφ, ΔН соответственно. Кроме того, из блока БНС 1 в БРПОЦ 3 поступают также углы ориентации ЛА - курс ψ, тангаж ϑ, крен γ, определяемые в блоке БНС 1 по известным алгоритмам, описанным в литературе, например [3].
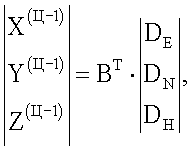
В блоке БРПОЦ 3 рассчитываются координаты оперативной цели относительно Земли, например, в виде географических координат λ(Ц-1), φ(Ц-1), Н(Ц-1) или декартовых координат Х(Ц-1), Y(Ц-1), Z(Ц-1). Для этого может быть использован, например, такой алгоритм:
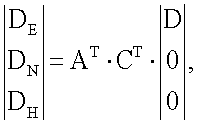
где DE, DN, DH - проекции вектора дальности до оперативной цели на оси географического трехгранника OENH;
А - матрица направляющих косинусов, соответствующая повороту от географического трехгранника OENH к связанному Oxyz;
С - матрица направляющих косинусов, соответствующая повороту от связанного трехгранника Oxyz к лучевому Ox'y'z';
В - матрица направляющих косинусов, соответствующая повороту от гринвичского трехгранника OXYZ к географическому OENH;
Т - символ транспонирования.
Указанные матрицы А, В и С могут быть определены, например, с помощью следующих формул:

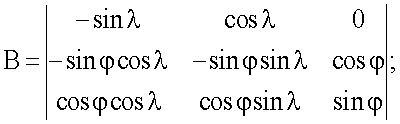
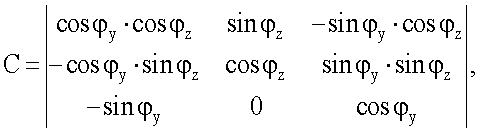
причем величины ψ, ϑ, γ и λ, φ суть углы курса, тангажа, крена и долготы, широты ЛА соответственно.
По найденным декартовым координатам оперативной цели Х(Ц-1), Y(Ц-1), Z(Ц-1) могут быть рассчитаны географические координаты оперативной цели λ(Ц-1), φ(Ц-1),
Н(Ц-1) с помощью известного алгоритма, например, представленного на стр.225-229 в [3]. Очевидно, что при этом погрешности базовой навигационной системы в определении координат ЛА полностью войдут в погрешности расчета координат оперативной цели, которые поэтому будут неточными.
Полученные неточные значения координат оперативной цели, измеренные точные значения относительных координат оперативной цели и грубые значения координат ЛА, полученные базовой системой, с выхода блока БРПОЦ 3 поступают на вход блока БХППОЦ 4, в котором осуществляется хранение этих величин для их последующего использования при решении специальных задач.
После расчета и записи параметров одной оперативной цели КСОПОЦ может переходить в режим обработки информации о другой оперативной цели. Алгоритм работы комплекса со второй оперативной целью полностью аналогичен вышеприведенному, а результатом его выполнения будут координаты второй оперативной цели (Х(Ц-2) Y(Ц-2) Z(Ц-2) или λ(Ц-2), φ(Ц-2), Н(Ц-2)), записанные в блоке БХППОЦ 4, в котором таким образом будет накапливаться информация о неточных значениях координат оперативных целей.
В блоке БХППОЦ 4 уже может быть накоплено некоторое количество данных об обнаруженных оперативных целях, когда наступят благоприятные условия для функционирования блока БКС 5 и он начнет определение параметров движения ЛА (координат, скорости) с точностью, существенно лучшей, чем точность аналогичных определений, выполненных с помощью БНС 1. Эти точные значения параметров движения ЛА с выхода блока БКС 5 поступают на второй вход блока БФИ 6, на первый вход которого при этом поступают менее точные значения аналогичных параметров движения ЛА с выхода блока БНС 1.
В блоке БФИ 6 осуществляет формирование вектора измерений Z погрешностей определения параметров движения ЛА базовыми навигационными средствами в виде разности значений одних и тех же параметров движения ЛА, полученных в блоках БНС 1 и БКС 5, например, географических или декартовых координат, составляющих вектора скорости в осях выбранной системы координат:
Z1=λБНС-λБКС или Z1=XБНС-XБКС;
Z2=φБНС-φБКС или Z2=YБНС-YБКС;
Z3=НБНС-НБКС или Z3=ZБНС-ZБКС;
Z4=VE БНС-VE БКС или Z4=VX БНС-VX БКС;
Z5=VN БНС-VN БКС или Z5=VY БНС-VY БКС;
Z6=VH БНС-VH БКС или Z6=VZ БНС-VZ БКС.
Полученный вектор измерений с выхода блока БФИ 6 поступает на вход блока БСФ 7, в котором по полученным измерениям осуществляется сглаживание погрешностей базовой навигационной системы в закрепленных точках, соответствующих моментам времени, в которые производились определения относительных координат оперативных целей относительно ЛА. Для этого может быть использован известный алгоритм решения задачи оптимального сглаживания в закрепленной точке, описанный, например, в [5] на стр.230, 234, 236-246, 265:


где:
j=k+1, k+2, …, - номера дискретных моментов времени, следующих с выбранным шагом Δt, k соответствует закрепленной точке - моменту фиксации относительных координат оперативной цели;
 - оценка вектора состояния базовой навигационной системы в k-той точке по измерениям, произведенным в j-той точке;
- оценка вектора состояния базовой навигационной системы в k-той точке по измерениям, произведенным в j-той точке;
W(j) - матрица передачи сглаживающего фильтра;
P(j, j) - значение ковариационной матрицы вектора состояния для j-того момента;
R(j) - значение ковариационной матрицы вектора измерений Z для j-того момента;
H(j) - матрица измерений, связывающая вектор измерений Z с оцениваемым вектором состояния Х базовой навигационной системы (Z=Н·Х+δ, δ - измерительный шум);
F(j, j-1) - матрица модели состояния, связывающая значение вектора состояния в j-тый и (j-1)-ый моменты (X(j)=F(j, j-1)·X(j))+ε, ε - входной шум).
Начальными условиями для приведенного рекуррентного алгоритма являются значения матрицы передачи и оценки вектора состояния в закрепленной k-той точке: W(k)=P(k, k) и X(k|k).
Полученные значения оценки вектора состояния базовой навигационной системы в закрепленных точках с выхода блока БСФ 7 поступают на вход блока БРКП 8, в котором осуществляется расчет поправок к значениям координат ЛА в рассматриваемых закрепленных точках - т.е. в моменты измерений относительных координат оперативных целей. Вид алгоритма, выполняемого в блоке БРКП 8, зависит от того, какие параметры движения ЛА входят в оцениваемый вектор состояния Х и какие параметры используются при расчете полных координат оперативной цели. Например, в состав вектора состояния могут быть включены погрешности базовой навигационной системы в определении географических или декартовых координат ЛА, т.е. величины Δλ, Δφ, ΔН или ΔХ, ΔY, ΔZ соответственно, а для расчета полных координат оперативной цели могут использоваться или географические, или декартовы координаты ЛА. При этом алгоритм блока БРКП 8 сводится к расчету точных значений координат ЛА в закрепленных точках по полученным оценкам их погрешностей и по запомненным грубым значениям, сформированным базовой навигационной системой.
Точные значения координат ЛА с выхода блока БРКП 8 поступают на второй вход блока БКПОЦ 9, на первый вход которого с выхода блока БХППОЦ 4 поступают запомненные точные значения относительных координат оперативных целей, полученных в закрепленных точках. В блоке БКПОЦ 9 по этим данным осуществляется расчет точных значений координат оперативных целей с помощью алгоритма, аналогичного алгоритму блока БРПОЦ 3, но использующему точные значения координат ЛА. Получаемые при этом координаты оперативных целей являются более точными, так как из них исключены погрешности базовой навигационной системы. С выхода блока БКПОЦ 9 точные координаты оперативных целей поступают на вход блока БХУПОЦ 10, в котором осуществляется их долгосрочное хранение. С выхода блока БХУПОЦ 10, являющегося выходом КСОПОЦ, эти параметры поступают различным потребителям для использования при решении различных функциональных задач. В частности, они могут быть использованы для боевой работы по этим целям как самим ЛА, обнаружившим и уточнившим их положение, так и другими (ударными) ЛА, взаимодействующие с первым, который при этом выступает в роли разведчика. Для этого информация о точных параметрах оперативно обнаруженных целей должна быть передана на наземный командно-диспетчерский пункт и на борт других (ударных) ЛА с помощью средств межбортового обмена данными (не входящими в состав КС). Кроме этого уточненные параметры оперативных целей могут использоваться всеми взаимодействующими ЛА (как самим разведчиком, так и другими) в качестве ориентиров для уточнения местоположения самих ЛА при решении ими навигационных задач - например, в условиях наличия помех для работы высокоточных спутниковых навигационных систем. Также информация о точных параметрах оперативно обнаруженных целей, переданная на наземный командно-диспетчерский пункт, может быть использована для боевого планирования при межвидовом взаимодействии сил.
Таким образом, введение в состав комплексной системы блоков БКС 5, БФИ 6, БСФ 7, БРКП 8, БКПОЦ 9, БХУПОЦ 10 обеспечивает эффективное автоматическое уточнение записанных координат обнаруженных оперативных целей, что существенно повышает качество решения различных специальных задач боевого применения ЛА, использующих информацию об этих целях. В частности,
- повышается точность наведения ударных ЛА на оперативно обнаруженную цель;
- обеспечивается возможность снижения времени пребывания ЛА в зоне противовоздушной обороны противника;
- обеспечивается возможность увеличения вероятности поражения цели при уменьшении расчетного наряда сил;
- обеспечивается возможность использования оперативных целей в качестве точечных ориентиров для повышения точности ориентировки и навигации;
- повышается эффективность планирования задач боевого применения.
В целом существенно повышается безопасность экипажа, боеготовность летательного аппарата и эффективность выполнения полетных заданий.
На примерах технической реализации показано достижение технического результата в части расширения функциональных возможностей комплексной системы определения параметров оперативных целей, а именно: автоматическая коррекция расчетных значений координат целей, вследствие чего повышается безопасность экипажа, боеготовность и эффективность применения объектов, оснащаемых КСОПОЦ.
ЛИТЕРАТУРА
1. Гришутин В.Г. Лекции по авиационным прицельным системам стрельбы. - Киев: КВВАИУ, 1980 г.
2. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г.
3. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.
4. Павлов Ю.Н., Селезнев А.В., Толстоусов Г.Н. Геоинформационные системы. М.: Машиностроение, 1978 г.
5. Медич Дж. Статистически оптимальные линейные оценки и управление. Пер. с англ. Под ред. А.С.Шаталова. М.: Энергия, 1973 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННО-ПРИЦЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2451907C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ | 2009 |
|
RU2389001C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| ОБЗОРНО-ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2391262C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
Изобретение относится к измерительным комплексам летательных аппаратов (ЛА) - самолетов и вертолетов. В состав предложенной системы, кроме базовой навигационной системы, обзорно-прицельных средств и блоков расчета и хранения параметров оперативных целей, входят также высокоточные корректирующие навигационные средства и блоки формирования измерений, сглаживающих фильтров, расчета корректирующих поправок, коррекции параметров оперативных целей и хранения уточненных параметров оперативных целей. Первичное определение координат оперативных целей осуществляется посредством обработки информации о положении ЛА, поступающей от базовой навигационной системы, и об относительных координатах цели, поступающей от обзорно-прицельных средств. Полученные грубые значения координат оперативных целей, а также точно измеренные значения их относительных координат и момент измерений запоминаются. При наступлении благоприятных условий для нормального функционирования высокоточных навигационных измерителей из состава блока корректирующих средств комплексной системы осуществляются формирование невязок между данными, получаемыми от этих измерителей и от базовой навигационной системы, а также последующая обработка этих невязок с целью определения величин погрешностей базовой системы, существовавших в момент измерения параметров оперативных целей. С использованием оценок указанных погрешностей и записанных параметров ЛА и цели формируются новые, более точные, значения координат целей. Изобретение обеспечивает эффективное автоматическое уточнение записанных координат обнаруженных оперативных целей, что повышает качество решения различных специальных задач боевого применения ЛА, использующих информацию об этих целях. 1 ил.
Комплексная система определения параметров оперативных целей, содержащая базовую навигационную систему, блок обзорно-прицельных средств, блок расчета параметров оперативных целей, блок хранения первичных параметров оперативных целей, причем выход базовой навигационной системы подключен к первому входу блока расчета параметров оперативных целей, выход блока обзорно-прицельных средств подключен ко второму входу блока расчета параметров оперативных целей, выход которого подключен к входу блока хранения первичных параметров оперативных целей, отличающаяся тем, что комплексная система определения параметров оперативных целей дополнительно снабжена блоком корректирующих средств, блоком формирования измерений, блоком сглаживающих фильтров, блоком расчета корректирующих поправок, блоком коррекции параметров оперативных целей, блоком хранения уточненных параметров оперативных целей, причем выход блока корректирующих средств подключен ко второму входу блока формирования измерений, к первому входу которого подключен выход базовой навигационной системы, выход блока формирования измерений подключен к входу блока сглаживающих фильтров, выход блока сглаживающих фильтров подключен ко входу блока расчета корректирующих поправок, выход блока корректирующих поправок подключен ко второму входу блока коррекции параметров оперативных целей, к первому входу которого подключен выход блока хранения первичных параметров оперативных целей, выход блока коррекции параметров оперативных целей подключен ко входу блока хранения уточненных параметров оперативных целей, выход которого является выходом комплексной системы определения параметров оперативных целей.
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА | 1998 |
|
RU2129696C1 |
| US 5790085 А, 04.08.1998. | |||

