Изобретение относится к области лазерной техники и может быть использовано в технологических, медицинских, метрологических, других лазерных установках и установках для научных исследований.
Известен способ управления лазером [1] заключающийся в том, что выделяют электрический сигнал, пропорциональный мощности излучения, сравнивают его с опорным электрическим сигналом и изменяют мощность излучения в соответствии с величиной разности между опорным сигналом и сигналом, пропорциональным мощности излучения, при этом мощность накачки увеличивают пропорционально этой разности, если опорный сигнал больше сигнала, пропорционального мощности излучения, и уменьшают, если опорный сигнал меньше сигнала, пропорционального мощности излучения.
Система управления для осуществления указанного способа содержит устройство для формирования сигнала, пропорционального мощности излучения, например светоделительную пластину и фотоприемник, источник опорного электрического сигнала, модулятор мощности излучения и лазер. При этом модулятор мощности увеличивает мощность накачки пропорционально разности между опорным и измеренным сигналами, если опорный сигнал больше сигнала, пропорционального мощности излучения, и уменьшает, если опорный сигнал меньше сигнала, пропорционального мощности излучения. Процесс управления осуществляется до тех пор, пока измеренная величина выходного параметра не будет равна заданному значению выходного параметра.
Недостатком указанного технического решения является наличие скачков напряжения на лазере при изменении значений величины опорного сигнала и в связи с этим низкая надежность работы системы.
Наиболее близким к заявляемому техническому решению является способ управления лазером [2] заключающийся в том, что задают опорный сигнал, пропорциональный номинальной величине выходного параметра (например, энергии генерации в импульсе, средней или импульсной мощности излучения и др.), выделяют сигнал, пропорциональный величине выходного параметра, и управляют мощностью накачки в соответствии с величиной ошибки между опорным сигналом и выделенным сигналом, при этом мощность накачки увеличивают пропорционально этой разности, если опорный сигнал больше сигнала, пропорционального величине выходного параметра, и уменьшают, если опорный сигнал меньше сигнала, пропорционального величине выходного параметра.
Система управления для осуществления указанного способа содержит задатчик выходного параметра, измеритель выходного параметра, электронный регулятор, модулятор и газоразрядную трубку. На выходе модулятора формируются импульсно-периодические разряды, которые подаются на газоразрядную трубку, а от светоделительной пластинки лазерное излучение направляется на измеритель выходного параметра, сигнал с которого поступает на один из входов электронного регулятора. На второй вход регулятора от задатчика выходного параметра подается опорное напряжение. При возникновении разности потенциалов между опорным напряжением и напряжением измерителя выходного параметра электронный регулятор обеспечивает изменение формируемых модулятором импульсно-периодических разрядов, а следовательно, и мощности накачки. При этом характер изменения формируемых модулятором импульсно-периодических разрядов определяется величиной разности между заданным и измеренным сигналами. Если опорный сигнал больше сигнала, пропорционального величине выходного параметра, обеспечивается увеличение мощности накачки пропорционально разности между заданным и измеренным сигналами и обеспечивается уменьшение мощности накачки, если опорный сигнал меньше сигнала, пропорционального величине параметра. Процесс управления осуществляется до тех пор, пока величина выходного параметра не будет равна заданному значению выходного параметра.
В основу работы данной системы положен принцип управления по отклонению. Для таких систем управления характерно следующее. В начальный момент управления, а также при задании новых значений требуемых величин выходного параметра, когда величина измеренная выходного параметра отличается от опорного сигнала, на вход объекта управления (лазера) подается ступенчатый сигнал управления, пропорциональный величине ошибки отработки системой заданного опорного сигнала. Величина скачка в этом сигнале может быть близка к максимально допустимой величине или даже превышать ее, что может привести к быстрому разрушению лазера.
Недостатком указанного решения является низкая надежность управления лазером в условиях частой смены заданий и изменения в широком диапазоне величины выходного параметра.
Технической задачей изобретения является повышение надежности управления лазером в условиях частой смены значений и изменения в широком диапазоне величины задаваемого выходного параметра.
Поставленная задача достигается тем, что задают опорный сигнал, пропорциональный номинальной величине выходного параметра, выделяют сигнал, пропорциональный величине выходного параметра, и управляют мощностью накачки в соответствии с величиной опорного сигнала, пропорционального номинальной величине выходного параметра, сравнивают выделенный сигнал, пропорциональный величине выходного параметра, со сформированными сигналами, пропорциональными максимальной и минимальной величинам выходного параметра, меньше сигнала, пропорционального величине выходного параметра, больше сигнала, пропорционального максимальной величине выходного параметра.
Для осуществления указанного способа в систему управления лазером, содержащую ее последовательно-соединенные модулятор накачки, лазер, измеритель выходного параметра, а также задатчик выходного параметра, вводятся усилитель, последовательно соединенные пороговое устройство, интегрирующее устройство и сумматор, причем выход задатчика выходного параметра соединен через усилитель со вторым входом сумматора и со вторым входом порогового устройства, первый вход которого соединен с выходом измерителя выходного параметра, а выход сумматора соединен с входом модулятора накачки.
В первом варианте реализации системы управления в пороговое устройство вводят последовательно соединенные второй усилитель, первый компаратор, первый инвертор и последовательно соединенные третий усилитель, вход которого соединен с входом второго усилителя, и второй компаратор, а интегрирующее устройство содержит последовательно соединенные первый источник опорного напряжения, второй инвертор, первый ключ, интегратор и последовательно соединенные второй источник опорного напряжения и второй ключ, выход которого соединен с входом интегратора, причем выход задатчика выходного параметра соединен с входом второго усилителя, выход измерителя выходного параметра соединен с вторыми входами первого и второго компараторов, выход интегратора подключен к первому входу сумматора, выход первого инвертора соединен с управляющим входом первого ключа, а выход второго компаратора соединен с управляющим входом второго ключа.
Во втором варианте реализации системы управления в пороговое устройство вводят последовательно соединенные второй усилитель, первый компаратор, первый инвертор и последовательно соединенные третий усилитель, вход которого соединен с входом второго усилителя, и второй компаратор, а интегрирующее устройство содержит последовательно соединенные реверсивный счетчик и цифроаналоговый преобразователь, выход которого соединен с первым входом сумматора, последовательно соединенные первый элемент И и второй инвертор, выход которого соединен с обратным счетным входом реверсивного счетчика, последовательно соединенные второй элемент И и третий инвертор, выход которого соединен с прямым счетным входом реверсивного счетчика, а также введен задающий генератор, выход которого соединен с вторыми входами первого и второго элемента И, причем выход задатчика выходного параметра соединен с вторыми входами первого и второго компараторов, выход первого инвертора соединен с первым входом первого элемента И, а выход второго компаратора соединен с первым входом второго элемента И.
Сопоставительный анализ с прототипом показывает, что заявляемый способ управления лазером отличается наличием вновь вводимых операций: формирование сигнала, пропорционального минимальной величине выходного параметра, и сигнала, пропорционального максимальной величине выходного параметра. Сравнение выделенного сигнала, пропорционального величине выходного параметра, со сформированными сигналами, пропорциональными максимальной и минимальной величинам выходного параметра, и увеличение мощности накачки, если выделенный сигнал, пропорциональный величине выходного параметра, меньше сигнала, пропорционального минимальной величине выходного параметра, и уменьшение мощности накачки, если выделенный сигнал, пропорциональный величине выходного параметра, больше сигнала, пропорционального максимальной величине выходного параметра, а также определенной последовательностью выполнения существующих и вновь введенных операций.
Заявляемая система управления лазером отличается наличием вновь вводимых элементов 5 8 (фиг.1); в первом варианте реализации системы управления это элементы 5 19 (фиг.2) и во втором варианте реализации системы управления это элементы 5 12, 20 26 (фиг.3), а также определенной последовательностью соединения существующих и вновь введенных элементов.
Таким образом, заявляемые способ и система управления для его реализации соответствуют критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение от прототипа, не были выявлены, и поэтому они обеспечивают заявляемому техническому решению соответствие критерию "существенные отличия".
В заявляемом техническом решении предлагается обеспечить подачу в начальный момент управления на лазер небольшого сигнала, пропорционального заданной величине выходного параметра (в пределах допустимой величины входного сигнала на лазер), затем постепенную (плавную) отработку системой заданного воздействия с последующим удержанием выходного параметра в пределах, определяемых заданными максимальным и минимальным значениями выходного параметра, сформированными в соответствии с требуемой величиной выходного параметра.
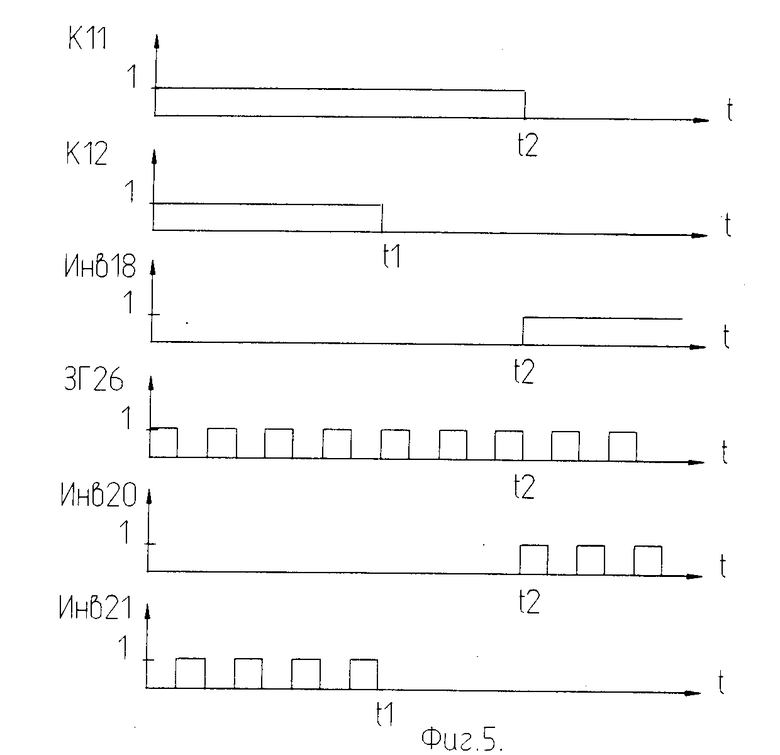
На фиг.1 изображена функциональная схема системы управления лазером; на фиг. 2 первый вариант реализации системы управления; на фиг.3 второй вариант реализации системы управления.
Функциональную схему системы управления лазером поясняет Фиг.1, на которой обозначено: 1 задатчик выходного параметра; 2 модулятор накачки; 3 лазер; 4 измеритель выходного параметра; 5 пороговое устройство; 6 - интегрирующее устройство; 7 сумматор и 8 усилитель. При этом сумматор 7, модулятор накачки 2, лазер 3, измеритель выходного параметра 4, пороговое устройство 5, интегрирующее устройство 6 соединены последовательно, задатчик выходного параметра 1, усилитель 8 соединены последовательно. Выход интегрирующего устройства 6 соединен с первым входом сумматора 7, второй вход которого соединен с выходом усилителя 8, а выход задатчика выходного параметра 1 соединен с вторым входом порогового устройства 5.
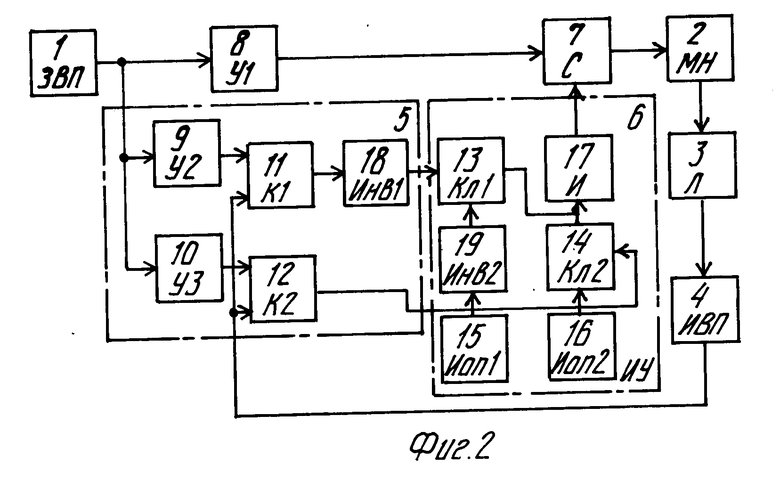
Первый вариант реализации системы управления лазером поясняет фиг.2, на которой обозначено: 1 задатчик выходного параметра; 2 модулятор накачки; 3 лазер; 4 измеритель выходного параметра; 5 пороговое устройство; 6 - интегрирующее устройство; 7 сумматор; 8-10 усилители; 11 и 12 - компараторы; 13 и 14 ключи; 15 и 16 источники опорного напряжения, 17 - интегратор и 18 и 19 инверторы. Пороговое устройство 5 включает усилители 9 и 10, компараторы 11 и 12 и инвертор 18, а интегрирующее устройство 6 включает ключи 13,14, источники опорного напряжения 15 и 16, интегратор 17 и инвертор 19. При этом сумматор 7, модулятор накачки 2, лазер 3, измеритель выходного параметра 4 соединены последовательно, задатчик выходного параметра 1, усилитель 8 соединены последовательно, задатчик выходного параметра 1, усилитель 8 соединены последовательно, усилитель 9, компаратор 11, инвертор 18 соединены последовательно, усилитель 10, компаратор 12 соединены последовательно, источник опорного напряжения 15, инвертор 19, ключ 13, интегратор 17 соединены последовательно, источник опорного напряжения 16, ключ 14 соединены последовательно. Выход интегратора 17 соединен с первым входом сумматора 7, второй вход которого соединен с выходом усилителя 8, выход задатчика выходного параметра соединен с входами усилителей 9 и 10, выход измерителя выходного параметра 4 соединен с вторыми входами компараторов 11 и 12, выход инвертора 18 с управляющим входом ключа 13, а выход компаратора 12 с управляющим входом ключа 14, выход которого соединен с входом интегратора 17.
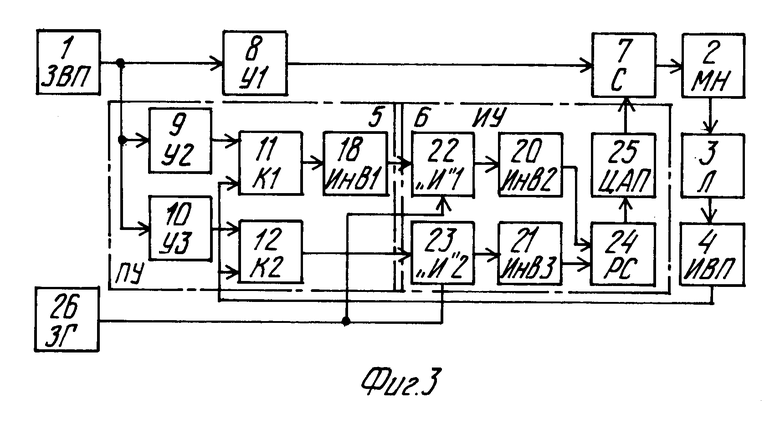
Второй вариант реализации системы управления лазером поясняет фиг.3, на которой обозначено: 1 задатчик выходного параметра; 2 модулятор накачки; 3 лазер; 4 измеритель выходного параметра; 5 пороговое устройство; 6 - интегрирующее устройство; 7 сумматор; 8 10 усилители; 11 и 12 - компараторы; 18, 20 и 21 инверторы, 22 и 23 элементы И; 24 реверсивный счетчик, 25 цифро-аналоговый преобразователь и 26 задающий генератор. Пороговое устройство 5 включает усилители 9, 10, компараторы 11 и 12 и инвертор 18, а интегрирующее устройство 6 включает инверторы 20, 21 и элементы И 22, 23, реверсивный счетчик 24 и цифроаналоговый преобразователь 25. При этом сумматор 7, модулятор накачки 2, лазер 3, измеритель выходного параметра 4 соединены последовательно, задатчик выходного параметра 1, усилитель 8 соединены последовательно, усилитель 9, компаратор 11, инвертор 18 соединены последовательно, усилитель 10, компаратор 12 соединены последовательно, элемент И 22, инвертор 20 соединены последовательно, реверсивный счетчик 24, цифроаналоговый преобразователь 25 соединены последовательно. Выход цифроаналогового преобразователя 25 соединен с первым входом сумматора 7, второй вход которого соединен с выходом усилителя 8, выход задатчика выходного параметра соединен с входами усилителей 9 и 10, выход измерителя выходного параметра 4 соединен с вторыми входами компараторов 11, 12. Выход инвертора 18 соединен с первым входом элемента И 22, выход компаратора 12 соединен с первым входом элемента И 23, выход инвертора 20 соединен с обратным счетным входом реверсивного счетчика 17, прямой счетный вход которого соединен с выходом инвертора 21, а выход задающего генератора 26 соединен с вторыми входами элементов И 20 и 21.
Задатчик выходного параметра 1 представляет собой последовательно соединенные однополярный источник опорного напряжения, реализованный на базе операционного усилителя 153УД6 (см. [3] сц.144-148, табл.6.1), и усилитель с программируемым коэффициентом передачи, реализованный на базе операционного усилителя 153УД6 (см. [3] с.57-59, рис.2.1).
Модулятор накачки 2 выполнен по известной схеме [2]
Лазер 3 представляет собой газоразрядную трубку (см [2]). Может быть использован He-Ne лазер, С02 лазер и др.
Измеритель выходного параметра 4 представляет собой последовательно соединенные зеркало резонатора, делительную пластину и фотоприемник [2]
Сумматор 7 представляет собой сумматор аналоговых сигналов с двумя входами, реализованный на базе операционного усилителя 153УД6 (см. [3] с.75-77, рис.3.2).
Усилители 8-10 представляют собой усилитель с регулируемым коэффициентом усиления, реализованный на базе операционного усилителя 153УД6 (см.[3] с. 57-59, табл.2.1).
Компараторы 11 и 12 представляют собой однопороговую схему сравнения, реализованную на базе операционного усилителя 153УД6 (см. [3] с.167-172, табл.7.2).
Ключи 13 и 14 представляют собой аналоговый ключ, реализованный на базе операционного усилителя 153УД6 (см. [3] с.190-193, рис.7.22), сигнал управления на который подается через инвертирующий усилитель, реализованный на базе операционного усилителя 153УД6 (см.[3] с.57-59, табл.2.1).
Источники опорного напряжения 15 и 16 представляют собой однополярный источник опорного напряжения, реализованный на базе операционного усилителя 153УД6 (см.[3] с.144-148, табл.6.1).
Интегратор 17 представляет собой аналоговый интегратор, реализованный на базе операционного усилителя 153УД6 (см.[3] с.77-79, табл.3.1).
Инверторы 18, 20 и 21 представляют собой логический элемент НЕ, реализованный на базе микросхемы 155ЛН1 (см.[4] с.156).
Инвертор 19 представляет собой инвертирующий усилитель, реализованный на базе операционного усилителя 153УД6 (см.[3] с.57-59, табл.2.1).
Элементы И 22, 23 представляют собой логический элемент 2И, реализованный на базе микросхемы 155ЛИ1 (см.[4] с.156).
Реверсивный счетчик 24 представляет собой четырехразрядный двоичный реверсивный счетчик, реализованный на базе микросхемы 155ИЕ7 (см.[4] с.142-144).
Цифроаналоговый преобразователь 25 представляет собой микросхему 572ПА1 (см.[5] с.230-239, рис.9.1).
Задающий генератор 26 представляет собой генератор прямоугольных импульсов, реализованный на базе операционного усилителя 153ДУ6 (см.[3] с. 138-141, рис.5.14, 5.15).
Вновь вводимые блоки реализуются на базе элементов, являющихся стандартными и выпускаемыми промышленностью со стандартной точностью.
Рассмотрим работу системы управления лазером,осуществляющую стабилизацию выходного параметра мощности излучения.
Первый вариант реализации системы управления лазером работает следующим образом.
Перед началом управления на задатчике выходного параметра 1 устанавливается коэффициент усилия, обеспечивающий формирование на выходе задатчика выходного параметра 1 сигнала, пропорционального требуемой мощности излучения лазера 1. Этот сигнал в момент начала управления подается на входы усилителей 8 10. Сигнал с выхода усилителя 8, уменьшенный до допустимой величины, подается на сумматор 7, на другой вход которого подается сигнал с выхода интегратора 17 (в начальный момент управления сигнал на выходе интегратора 17 равен нулю). С выхода сумматора 7 подается сигнал на вход модулятора накачки 2. Это обеспечивает в начальный момент управления небольшой скачок в управляющем сигнале на входе модулятора накачки 2. На выходе модулятора накачки 2 формируются импульсно периодические разряды, которые подаются на лазер 3, а от светоделительной пластинки лазерное излучение направляется на измеритель выходного параметра 4, сигнал с выхода которого поступает на входы компараторов 11 и 12, на другие входы которых поступают соответственно сигналы с выходов усилителей 9 и 10. В случае, если сигнал с выхода измерителя выходного параметра 4 меньше сигнала, сформированного на выходе усилителя 10 и пропорционального минимальному значению выходного параметра, срабатывает компаратор 12. Управляющий сигнал с выхода компаратора 12 подается на ключ 14. Ключ 14 переходит в замкнутое состояние и обеспечивает подачу сигнала с выхода источника опорного напряжения 16 на вход интегратора 17, на выходе которого формируется линейно возрастающий сигнал. Это обеспечивает увеличение мощности накачки, а следовательно, увеличение величины выходного параметра. В случае, если сигнал с выхода измерителя выходного параметра 4 больше сигнала, сформированного на выходе усилителя 9 и пропорционального максимальному значению выходного параметра, компаратор 11 переходит в режим превышения опорного сигнала. Управляющий сигнал с выхода компаратора 11 через инвертор 18 подается на ключ 13. Ключ 13 переходит в замкнутое состояние и обеспечивает подачу сигнала с выхода источника опорного напряжения 15 через инвертор 19 на вход интегратора 17, на выходе которого формируется линейно убывающий сигнал. Это обеспечивает уменьшение мощности накачки, а следовательно, уменьшение величины выходного параметра. Если сигнал с выхода измерителя выходного параметра 4 больше сигнала, сформированного на выходе усилителя 9 и пропорционального максимальному значению выходного параметра, ключи 13 и 14 разомкнуты и с выхода интегратора 17 подается постоянное значение сигнала. Это обеспечивает постоянную величину мощности накачки, а следовательно, сохранение величины выходного параметра в пределах, определяемых заданными максимальным и минимальным значениями выходного параметра.
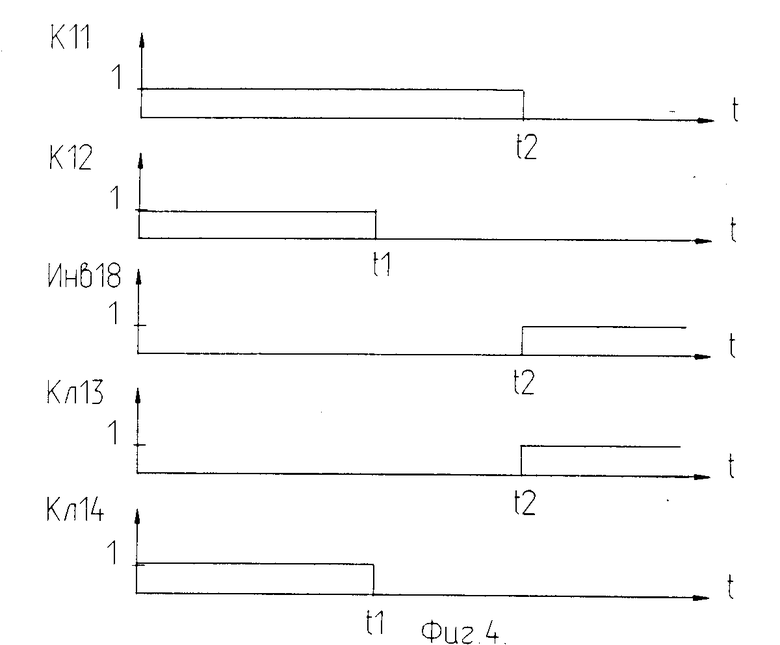
Циклограмма работы компараторов 11 и 12, ключей 13 и 14 и инвертора 18 приведена на фиг.4. Здесь "1" ключи 13 и 14 замкнуты, компараторы 11, 12 в режиме превышения опорного сигнала; инвертор 18 в состоянии логической 1; "0" ключи разомкнуты, компараторы 11 и 12 сработали, инвертор 18 в состоянии логического 0.
t1 определяется моментом времени срабатывания компаратора 12 по условию:
U4 U10 <= UeO
где U4 входной сигнал с выхода измерителя выходного параметра 4;
U10 опорный сигнал с выхода усилителя 10;
U10 k10 • U1
U1 сигнал с выхода задатчика выходного параметра 1;
k10 коэффициент передачи усилителя 10 устанавливается в диапазоне 0,4 1;
UeO зона нечувствительности компаратора 12.
t2 определяется моментом времени срабатывания компаратора 13 по условию:
U4 U9 <= UgO
где U4 входной сигнал с выхода измерителя выходного параметра 4;
U9 опорный сигнал с выхода усилителя 9;
U9 k9 • U1;
U1 сигнал с выхода задатчика выходного параметра 1;
k9 коэффициент передачи усилителя 9 устанавливается в диапазоне 1 1,6;
UgO зона нечувствительности компаратора 13.
В первом варианте реализации системы управления повышение надежности достигается путем:
подачи в начальный момент управления с выхода усилителя 8 на лазер небольшого сигнала, пропорционального заданной величине выходного параметра, но в пределах допустимой величины входного сигнала на лазер;
формирования на выходе усилителя 9 сигнала, пропорционального максимальному значению выходного параметра;
формирования на выходе усилителя 10 сигнала, пропорционального минимальному значению выходного параметра;
формирования управляющего сигнала с помощью элементов 5 и 6, 9-19 на выходе сумматора 7 управляющего сигнала, обеспечивающего постепенную (плавную) отработку системой заданного воздействия с последующим удержанием выходного параметра в заданных пределах, определяемых максимальным и минимальным значением выходного параметра;
определенной последовательности соединения вновь вводимых элементов 5 - 19 и выполнения определенных параметрических соотношений.
Обосновать работу первого варианта системы управления можно следующим образом.
Для момента времени 0 t1, когда измеренное значение выходного параметра меньше заданного минимального значения выходного параметра, сигнал управления, формируемый на выходе сумматора 7, имеет вид:
где U8 сигнал с выхода усилителя 8:
U8 k8 • U1;
где U1 сигнал с выхода задатчика выходного параметра 1;
U8 сигнал с выхода усилителя 8;
k8 коэффициент передачи усилителя 8 устанавливается в диапазоне 0 0,6;
U16 сигнал с выхода источника опорного напряжения 16;
U17(0) начальное условие на интеграторе 17 (в начальный момент времени управления устанавливается, как правило, нулевое значение), определяет совместно с величиной сигнала U8 величину начального скачка в сигнале управления U7(t);
k17 коэффициент передачи интегратора 17, определяет совместно с величиной сигнала U16 быстроту нарастания сигнала управления U7(t);
t текущее время.
Для момента времени t1 t2, когда измеренное значение выходного параметра находится в заданных пределах, определяемых максимальным и минимальным значениями выходного параметра, сигнал управления, формируемый на выходе сумматора 7, имеет вид:
U7 U8 + U17(t1);
где U8 сигнал с выхода усилителя 8;
U17(t1) начальное условие на интеграторе 17 для момента времени t1.
Для момента времени t > t2, когда измеренное значение выходного параметра больше заданного максимального значения выходного параметра, сигнал управления, формируемый на выходе сумматора 7, имеет вид:
где U8 сигнал с выхода усилителя 8;
U15 сигнал с выхода источника опорного напряжения 15;
U17(t2) начальное условие на интеграторе 17 для момента времени t2;
k17 коэффициент передачи интегратора 17, определяет совместно с величиной сигнал U15, определяет быстроту уменьшения сигнала управления U7(t).
Анализ формул (1) (8) показывает, что в управляющем сигнале отсутствуют скачки и сигнал управления лазером носит плавный характер.
Второй вариант реализации системы управления лазером работает следующим образом.
Перед началом управления на задатчике выходного параметра 1 устанавливается коэффициент усиления, обеспечивающий формирование на выходе задатчика выходного параметра 1 сигнала, пропорционального требуемой мощности излучения лазера 1. Этот сигнал в момент начала управления подается на входы усилителей 8 10. Сигнал с выхода усилителя 8, уменьшенный до допустимой величины, подается на сумматор 7, на другой вход которого подается сигнал с выхода цифроаналогового преобразователя 25 (в начальный момент управления сигнал на выходе цифроаналогового преобразователя равен нулю). С выхода сумматора 7 подается сигнал на вход модулятора накачки 2. Это обеспечивает в начальный момент управления небольшой скачок в управляющем сигнале на входе модулятора накачки 2. На выходе модулятора накачки 2 формируются импульсно-периодические разряды, которые подаются на лазер 3, а от светоделительной пластинки лазерное излучение направляется на измеритель выходного параметра 4, сигнал с выхода которого поступает на входы компараторов 11 и 12, на другие входы которых поступают соответственно сигналы с выходов усилителей 9 и 10. В случае, если сигнал с выхода измерителя выходного параметра 4 меньше сигнала, сформированного на выходе усилителя 10 и пропорционального минимальному значению выходного параметра, срабатывает компаратор 12. Управляющий сигнал с выхода компаратора 12 подается на элемент И 23, на второй вход которого подается сигнал с выхода задающего генератора 26. На выходе элемента И 23 формируются импульсы. Эти импульсы через инвертор 21 подаются на прямой счетный вход реверсивного счетчика 24. Выходное значение реверсивного счетчика 24. Выходное значение реверсивного счетчика 24 преобразуется цифроаналоговым преобразователем 25 в линейно возрастающий сигнал. Это обеспечивает увеличение мощности накачки, а следовательно, увеличение величины выходного параметра. В случае, если сигнал с выхода измерителя выходного параметра 4 больше сигнала, сформированного на выходе усилителя 9 и пропорционального максимальному значению выходного параметра, компаратор 11 переходит в режим превышения опорного сигнала. Управляющий сигнал с выхода компаратора 11 через инвертор 18 подается на элемент И 22, на второй вход которого подается сигнал с выхода задающего генератора 26. На выходе элемента И 22 формируются импульсы. Эти импульсы через инвертор 20 подаются на обратный счетный вход реверсивного счетчика 24. Выходное значение реверсивного счетчика 24 преобразуется цифроаналоговым преобразователем 25 в линейноубывающий сигнал. Это обеспечивает уменьшение мощности накачки, а следовательно, уменьшение величины выходного параметра. Если сигнал с выхода измерителя выходного параметра 4 больше сигнала, сформированного на выходе усилителя 10 и пропорционального минимальному значению выходного параметра, и меньше сигнала, сформированного на выходе усилителя 9 и пропорционального максимальному значению выходного параметра, и меньше сигнала, сформированного на выходе усилителя 9 и пропорционального максимальному значению выходного параметра, на первые входы элементов И 22 и 23 подаются сигналы, соответствующие логическому 0. На выходах элементов И 22 и 23 также устанавливаются логические 0 и с выхода цифроаналоговым преобразователем 25 выдается запомненное значение сигнала. Это обеспечивает постоянную величину мощности накачки, а следовательно, сохранение величины выходного параметра в пределах, определяемых заданными максимальным и минимальным значениями выходного параметра. Наличие инверторов 20 и 21 обусловлено тем, что при прямом счете на выходе обратного счетного входа реверсивного счетчика 24 должно быть напряжение логической 1, при обратном счете на входе прямого реверсивного счетчика 24 должно быть напряжение логической 1 [4, с.144]
Циклограмма работы компараторов 11 и 12, элементов И 18, 22 и 23 и задающего генератора 26 приведена на фиг.5. Здесь "1" компараторы 11 и 12 в режиме превышения опорного сигнала, инверторы 18, 20 и 21 в состоянии логической 1, задающий генератора 26 в состоянии выдачи прямоугольного импульса; "0" компараторы 11 и 12 сработали, инверторы 18, 20 и 21 в состоянии логического 0, задающий генератор 26 не формирует прямоугольные импульсы.
t1 определяется моментом времени срабатывания компаратора 12 по условию:
U4 U10 <= UeO
где
U4 входной сигнал с выхода измерителя выходного параметра 4;
U10 опорный сигнал с выхода усилителя 10;
UeO зона нечувствительности компаратора 12.
t2 определяется моментом времени срабатывания компаратора 13 по условию:
U4 U9 <= UgO
где
U4 входной сигнал с выхода измерителя выходного параметра 4;
U9 опорный сигнал с выхода усилителя 9;
UgO зона нечувствительности компаратора 13.
В предлагаемой системе управления повышение надежности достигается путем:
подачи в начальный момент управления с выхода усилителя 8 на лазер небольшого сигнала, пропорционального заданной величине выходного параметра, но в пределах допустимой величины входного сигнала на лазер;
формирования на выходе усилителя 9 сигнала, пропорционального максимальному значению выходного параметра;
формирования на выходе усилителя 10 сигнала, пропорционального минимальному значению выходного параметра;
формирования управляющего сигнала с помощью элементов 5, 6, 9-12, 18, 20-26 на выходе сумматора 7 управляющего сигнала, обеспечивающего постепенную (плавную) отработку системой заданного воздействия с последующим удержанием выходного параметра в заданных пределах, определяемых максимальным и минимальным значениями выходного параметра;
определенной последовательности соединения вновь вводимых элементов 5,6, 9-12, 18, 20-26 и выполнения определенных параметрических соотношений.
Обосновать работу системы управления можно следующим образом.
Для момента времени 0 t1, когда измеренное значение выходного параметра меньше заданного минимального значения выходного параметра, сигнал управления, формируемый на выходе сумматора 7, имеет вид:
U7(t) U8 + k25•f•t + k25•N[0]
где
U8 сигнал с выхода усилителя 8:
N[0] начальное значение реверсивного счетчика 24 (в начальный момент времени управления устанавливается, как правило, нулевое значение), определяет совместно с величиной сигнала U8 и значением коэффициента передачи k25 величину начального скачка в сигнале управления U7(t);
f частота задающего генератора 26;
k25 коэффициент передачи цифроаналогового преобразователя 25 совместно с частотой f определяет скорость увеличения сигнала управления U7(t).
Для момента времени t1 t2, когда измеренное значение выходного параметра находится в заданных пределах, определяемых максимальным и минимальным значениями выходного параметра, сигнал управления, формируемый на выходе сумматора 7, имеет вид:
U7(t) U8 + k25•N[t1]
где
U8 сигнал с выхода усилителя 8;
N[t1] начальное значение реверсивного счетчика 24 для момента времени t1.
Для момента времени t > t2, когда измеренное значение выходного параметра больше заданного максимального значения выходного параметра, сигнал управления, формируемый на выходе сумматора 7, имеет вид:
U7(t)= U8 k25•f•(t-t2) + k25•N[t2]
где
U8 сигнал с выхода усилителя 8;
N[t2] начальное значение реверсивного счетчика 24 для момента времени t2;
k25 коэффициент передачи цифроаналогового преобразователя 25 совместно с частотой f определяет скорость увеличения сигнала управления U7(t).
Анализ формул (9)-(13) показывает, что в управляющем сигнале отсутствуют скачки и сигнал управления лазером носит плавный характер.
Таким образом, в предлагаемой системе управления обеспечивается подача в начальный момент управления на лазер небольшого сигнала, пропорционального заданной величине выходного параметра, но в пределах допустимой величины входного сигнала на лазер, а затем постепенную (плавную) отработку заданного воздействия с последующим удержанием выходного параметра в заданных пределах, определяемых максимальным и минимальным значениями выходного параметра.
Следовательно, использование новых элементов 5-26, соединенных в соответствии с фигурами 1,2 и 3 с указанными характеристиками (1)-(13) в предлагаемой системе управления выгодно отличает предлагаемое техническое решение от прототипа, так как обеспечивает повышение надежности управления лазером в условиях частой смены заданий и изменения в широком диапазоне величины выходного параметра.
Использование: изобретение относится к области лазерной техники и может быть использовано в технологических, медицинских, метрологических, других лазерных установках и установках для научных исследований. Сущность: в способе управления параметрами задают опорный сигнал, пропорциональный номинальной величине выходного параметра, и управляют мощностью накачки в соответствии с величиной опорного сигнала, пропорционального номинальной величине выходного параметра, и сигнал, пропорциональный максимальной величине выходного параметра, сравнивают выделенный сигнал, пропорциональный величине выходного параметра, с сформированными сигналами, пропорциональными максимальной и минимальной величинам выходного параметра, и увеличивают мощность накачки, если выделенный сигнал, пропорциональный величине выходного параметра, меньше сигнала, пропорционального минимальной величине выходного параметра, и уменьшают мощность накачки, если выделенный сигнал, пропорциональный величине выходного параметра, больше сигнала, пропорционального максимальной величине выходного параметра. 2 с. и 2 з.п. ф-лы, 5 ил.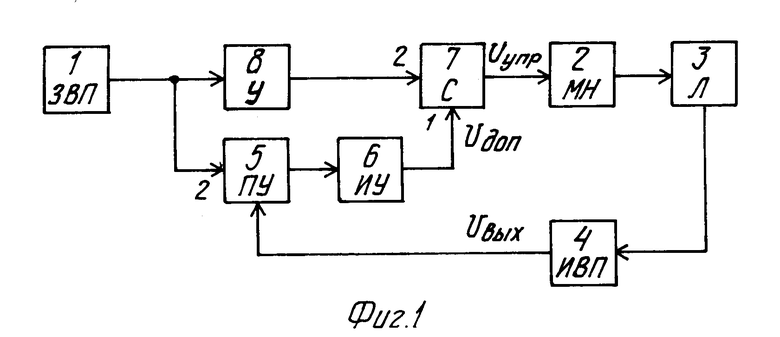
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привалов В.Е | |||
| Газоразрядные лазеры в измерительных комплексах | |||
| Л.: Судостроение, 1989, с | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Солдатов А.И | |||
| и др | |||
| Газоразрядные лазеры на самоограничительных переходах в парах металла | |||
| - Новосибирск: Наука, 1985, с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Алексеенко А.Г | |||
| и др | |||
| Применение прецизионных аналоговых ИС.-М.: Радио и связь, 1981 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Справочник по интегральным микросхемам / Под ред | |||
| Б.В.Тарабрина | |||
| - М.: Энергия, 1981 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Гутников В.С | |||
| Интегральная электроника в измерительных устройствах | |||
| - Л.: Энергоиздат, 1988. | |||
