Изобретение относится к области лазерной техники и автоматическим системам и может быть использовано в научно-исследовательских, технологических, медицинских, метрологических и других установках.
Известен способ управления параметрами излучения лазера [1], заключающийся в том, что задают опорный сигнал, пропорциональный номинальной величине выходного параметра, выделяют сигнал, пропорциональный величине выходного параметра, формируют сигнал, пропорциональный минимальной и максимальной величине выходного параметра, сравнивают выделенный сигнал, пропорциональный величине выходного параметра, с сформированными сигналами и увеличивают мощность накачки, если выделенный сигнал меньше сигнала, пропорционального минимальной величине выходного параметра, и уменьшают мощность накачки, если выделенный сигнал больше сигнала, пропорционального максимальной величине выходного параметра.
Система управления [1] для осуществления указанного способа содержит последовательно соединенные задатчик выходного параметра, усилитель, сумматор, модулятор накачки, лазер, измеритель выходного параметра и последовательно соединенные пороговое устройство и интегрирующее устройство, выход которого соединен со вторым входом сумматора, причем выход задатчика выходного параметра соединен со вторым входом порогового устройства, первый вход которого соединен с выходом измерителя выходного параметра.
Недостатком указанных технических решений является невысокая точность отработки величины опорного сигнала, определяемая зоной сформированных сигналов, пропорциональных минимальной и максимальной величине выходного сигнала.
Наиболее близким к заявляемому техническому решению является способ управления параметрами объекта [2], заключающийся в том, что задают опорный сигнал, пропорциональный номинальной величине выходного параметра (например, энергии генерации в импульсе, средней или импульсной мощности излучения и др. ), выделяют сигнал, пропорциональный величине выходного параметра, и управляют мощностью накачки в соответствии с величиной ошибки между опорным сигналом и выделенным сигналом, при этом мощность накачки увеличивают пропорционально этой разности, если опорный сигнал больше сигнала, пропорционального величине выходного параметра, и уменьшают, если опорный сигнал меньше сигнала, пропорционального величине выходного параметра.
Система управления [2] для осуществления указанного способа содержит задатчик выходного параметра, измеритель выходного параметра, электронный регулятор, модулятор и газоразрядную трубку. На выходе модулятора формируются импульсно-периодические разряды, которые подаются на газоразрядную трубку, а от светоделительной пластинки лазерное излучение направляется на измеритель выходного параметра, сигнал с которого поступает на один из входов электронного регулятора. На второй вход регулятора от задатчика выходного параметра подается опорное напряжение. При возникновении разности потенциалов между опорным напряжением и напряжением измерителя выходного параметра электронный регулятор обеспечивает изменение формируемых модулятором импульсно-периодических разрядов, а следовавательно, и мощности накачки. При этом характер изменения формируемых модулятором импульсно-периодических разрядов определяется величиной разности между заданным и измеренным сигналами. Если опорный сигнал больше сигнала, пропорционального величине выходного параметра, обеспечивается увеличение мощности накачки пропорционально разности между заданным и измеренным сигналами, и обеспечивается уменьшение мощности накачки, если опорный сигнал меньше сигнала, пропорционального величине выходного параметра. Процесс управления осуществляется до тех пор, пока величина выходного параметра не будет равна заданному значению выходного параметра.
Система управления (см. [3] стр.31...32, рис. 1.9) для осуществления указанного способа содержит последовательно соединенные координатор (измеритель входного сигнала), бортовой координатор (измеритель выходного параметра), блок управления и объект управления. Бортовой координатор обеспечивает оценку параметров объекта относительно входного сигнала. Блок управления обеспечивает формирование управления параметрами объектом по отклонениям параметров объекта относительно входного сигнала.
Система управления (см. [3] стр.29...30, рис. 1.7) для осуществления указанного способа содержит последовательно соединенные первый координатор (измеритель входного сигнала), блок управления, объект управления и второй координатор (измеритель выходного параметра). Первый координатор обеспечивает оценку параметров входного сигнала, а второй координатор обеспечивает оценку параметров объекта. Блок управления обеспечивает формирование управления параметрами объекта по отклонениям параметров объекта относительно входного сигнала.
Система управления (см. [3] стр.28, рис. 1.6) для осуществления указанного способа содержит последовательно соединенные координатор (измеритель выходного параметра), блок управления и объект управления. Координатор обеспечивает оценку параметров объекта относительно входного сигнала. Блок управления обеспечивает формирование управления параметрами объекта по отклонениям параметров объекта относительно входного сигнала.
В основу работы этих систем положен принцип управления по отклонению. Для таких систем управления характерно следующее. Для системы [2] в начальный момент управления, когда величина измеренного выходного параметра значительно отличается от входного сигнала, на вход объекта управления подается ступенчатый сигнал управления, пропорциональный величине ошибки отработки системой заданного входного сигнала. Величина скачка в этом сигнале может быть близка к максимально допустимой величине или даже превышать ее, что приводит к ухудшению качества управления объектом, в некоторых случаях даже к его повреждению. Для систем [3] в начале управления не удается определить параметры объекта в связи с ограничениями полей измерителей, и объект движется по инерции до тех пор, пока не попадет в поле измерителя. Объект в начале управления обычно сильно инерционен, что может приводить к затягиванию времени начального участка управления. После того как объект попал в поле измерителя, осуществляется формирование управления параметрами объекта по отклонениям параметров объекта относительно входного сигнала.
Недостатком указанных решений является невысокое качество регулирования объектом на начальном этапе задания входного сигнала, связанное для системы [2] с наличием скачка в сигнале ошибки, а для систем [3] с ограничениями полей измерителей и большой инерционностью объекта.
Задачей изобретения является улучшение качества регулирования выходными параметрами объекта на начальном этапе задания входного сигнала при сохранении точности регулирования, характерного для метода управления по отклонению, на этапе отработки входного сигнала.
Решение поставленной задачи достигается тем, что задают входной сигнал, пропорциональный номинальной величине выходного параметра, выделяют сигнал, пропорциональный величине выходного параметра, формируют сигнал ошибки, пропорциональный разности между входным и выделенным сигналами, и управляют параметром объекта таким образом, чтобы уменьшить сигнал ошибки, при этом после задания входного сигнала устанавливают пороговые сигналы, определяющие значения положительной и отрицательной величины отклонения от номинальной величины выходного параметра, после формирования сигнала ошибки сравнивают сигнал ошибки с пороговыми сигналами, пропорциональными положительной и отрицательной величине отклонения от номинальной величины выходного параметра, и при сигнале ошибки меньше порогового сигнала, пропорционального отрицательной величине отклонения от номинальной величины выходного параметра, или больше порогового сигнала, пропорционального положительной величине отклонения от номинальной величины выходного параметра, управляют изменением параметров объекта в соответствии с входным сигналом, а при сигнале ошибки больше порогового сигнала, пропорционального отрицательной величине отклонения от номинальной величины выходного параметра, и меньше порогового сигнала, пропорционального положительной величине отклонения от номинальной величины выходного параметра, управляют изменением параметров объекта в соответствии с разностью между входным и выделенным сигналами.
Для осуществления указанного способа в систему управления параметрами объекта, содержащую последовательно соединенные задатчик выходного параметра, блок формирования разности и блок управления, последовательно соединенные объект и измеритель выходного параметра, выход которого соединен со вторым входом блока формирования разности, введены блок переключения, выход которого соединен с входом объекта, и формирователь управляющего воздействия, выход которого соединен со вторым входом блока переключения, причем выход блока управления соединен с первым входом блока переключения, а выход блока формирования разности соединен с третьим входом блока переключения.
Для осуществления указанного способа в систему управления параметрами объекта, содержащую объект и последовательно соединенные задатчик выходного параметра, измеритель входного сигнала, измеритель выходного параметра, второй вход которого соединен с выходом объекта, блок управления, введены блок переключения, выход которого соединен с входом объекта, и формирователь управляющего воздействия, выход которого соединен со вторым входом блока переключения, причем выход блока управления соединен с первым входом блока переключения, а выход измерителя выходного параметра соединен с третьим входом блока переключения.
Для осуществления указанного способа в систему управления параметрами объекта, содержащую последовательно соединенные Я задатчик выходного параметра, измеритель входного сигнала, блок формирования разности и блок управления, последовательно соединенные объект и измеритель выходного параметра, выход которого соединен со вторым входом блока формирования разности, введены блок переключения, выход которого соединен с входом объекта, и формирователь управляющего воздействия, выход которого соединен со вторым входом блока переключения, причем выход блока управления соединен с первым входом блока переключения, а выход измерителя выходного параметра соединен с третьим входом блока переключения.
Для осуществления указанного способа в систему управления параметрами объекта, содержащую объект и последовательно соединенные задатчик выходного параметра, измеритель выходного параметра, второй вход которого соединен с выходом объекта, блок управления, введены блок переключения, выход которого соединен с входом объекта, и формирователь управляющего воздействия, выход которого соединен со вторым входом блока переключения, причем выход блока управления соединен с первым входом блока переключения, а выход измерителя выходного параметра соединен с третьим входом блока переключения.
В заявляемом техническом решении предлагается на начальном этапе задания входного сигнала формировать управляющее воздействие объектом пропорционально заданной величине выходного параметра с последующим переходом на этапе отработки входного сигнала к формированию управляющего воздействия объектом, пропорционального разности между входным и выделенным сигналами.
Предлагаемое техническое решение поясняется фиг. 1, 2, 3 и 4, где фиг. 1 изображает первый вариант реализации системы управления, фиг. 2 изображает второй вариант реализации системы управления, фиг. 3 изображает третий вариант реализации системы управления, фиг. 4 изображает четвертый вариант реализации системы управления.
Первый вариант реализации системы управления параметрами объекта поясняет фиг. 1, на которой обозначено: 1 - задатчик выходного параметра; 2 - блок формирования разности; 3 - блок управления; 4 - объект; 5 - измеритель выходного параметра; 6 - блок переключения; 7 - формирователь управляющего воздействия.
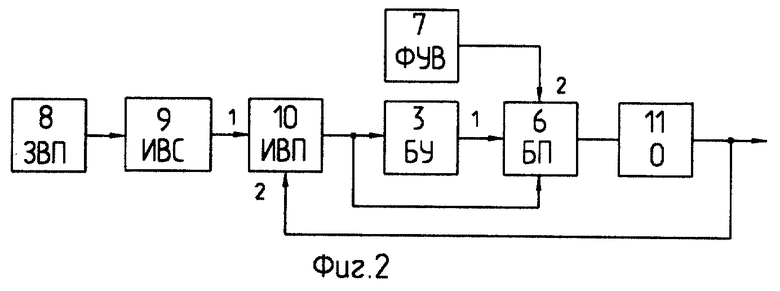
Второй вариант реализации системы управления параметрами объекта поясняет фиг. 2, на которой обозначено: 3 - блок управления; 6 - блок переключения; 7 - формирователь управляющего воздействия; 8 - задатчик выходного параметра; 9 - измеритель входного сигнала; 10 - измеритель выходного параметра; 11 - объект.
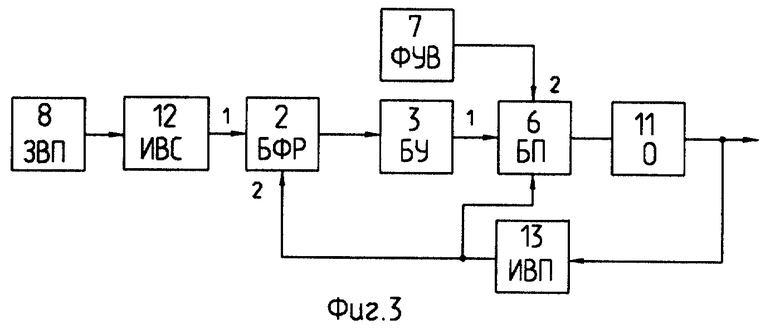
Третий вариант реализации системы управления параметрами объекта поясняет фиг. 3, на которой обозначено: 2 - блок формирования разности; 3 - блок управления; 6 - блок переключения; 7 - формирователь управляющего воздействия; 8 - задатчик выходного параметра; 11 - объект; 12 - измеритель входного сигнала; 13 - измеритель выходного параметра.
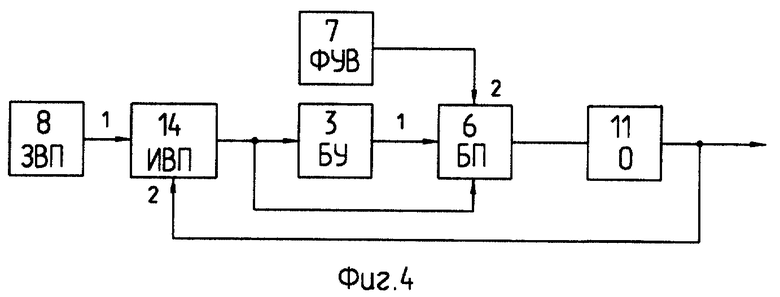
Четвертый вариант реализации системы управления параметрами объекта поясняет фиг. 4, на которой обозначено: 3 - блок управления; 6 - блок переключения; 7 - формирователь управляющего воздействия; 8 - задатчик выходного параметра; 11 - объект, 14 - измеритель выходного параметра.
Задатчик выходного параметра 1 представляет собой последовательно соединенные однополярный источник опорного напряжения, реализованный на базе операционного усилителя 153УД6 (см. [3], стр.144...148, табл.6.1), и усилитель с программируемым коэффициентом передачи, реализованный на базе операционного усилителя 153УД6 (см. [4], стр.57...59, рис.2.1).
Блок формирования разности 2 представляет собой сумматор аналоговых сигналов с двумя входами (инвертирующим и неинвертирующим), реализованный на базе ОУ 153УД6 (см. [4] стр.75...77, рис. 3.2).
Блок управления 3 представляет собой корректирующий фильтр, реализованный на базе ОУ 153УД6 (см. [3] стр. 366...371, рис. 7.15).
Объект 4 представляет газоразрядную трубку (см. [2]). Может быть использован He-Ne лазер, CO2 лазер или лазерные диодные модули, реализованные на базе элемента SDL- 2350-H2 (см.[5], стр. 6...10, 12...16).
Измеритель выходного параметра 5 представляет собой последовательно соединенные зеркало резонатора, делительную пластину и фотоприемник (см. [2] ).
Блок переключения 6 представляет собой аналоговый коммутатор, реализованный на базе операционного усилителя 153УД6 (см. [4], стр. 190...194, рис. 7.20, 7.23), первый вход которого соединен с выходом блока управления 3, а второй вход - с выходом формирователя управляющих воздействий 7. Управляющий вход переключателя 6 является управляющим входом аналогового коммутатора, на входе которого установлены последовательно соединенные устройство выделения модуля, представляющее собой элемент выделения модуля аналогового сигнала, построенный на базе микросхемы 153УД6 по известной схеме (см.[6], стр. 44, рис. 2.9), и компаратор, представляющий собой однопороговую схему сравнения, реализованную на базе операционного усилителя 153УД6 (см. [4], стр.167... 172, табл.7.2).
Формирователь управляющего воздействия 7 представляет собой последовательно соединенные двухполярный источник опорного напряжения, реализованный на базе операционного усилителя 153УД6 (см. [4], стр.144...148, табл.6.1), и усилитель с программируемым коэффициентом передачи, реализованный на базе операционного усилителя 153УД6 (см. [4], стр.57...59, рис.2.1).
Задатчик выходного параметра 8 может представлять собой воздушный объект слежения (см. [7] стр. 147...161), а также наземный объект слежения.
Измеритель входного сигнала 9 представляет собой оптико- электронный излучатель (см. [8] стр. 5...25, рис. 1.8).
Измеритель выходного параметра 10 представляет собой оптико-электронный приемник излучения (см. [8] стр. 82...136).
Объект 11, включающий усилительно-преобразующую аппаратуру, рулевой привод, планер и кинематические соотношения, выполнен по известной схеме (см. [9] стр. 388...404, [3] стр. 372...379).
Измеритель входного сигнала 12 и измеритель выходного параметра 13 включают пеленгационное устройство, блок управления, исполнительный привод, датчик угла поворота, антенную установку, являются узкопольными пеленгаторами, предназначенными для определения координат объекта слежения и выполнены по известной схеме (см.[10] стр. 63...70, рис.2.7...2.9).
Измеритель выходного параметра 14 представляет собой оптико-электронный прибор (см. [7] стр. 235 - 264, рис. 7.4) при установке его на объекте 11 или оптико-электронный приемник (см. [8] стр. 82...136) при размещении его на наземной установке.
Вновь вводимые блоки реализуются на базе элементов, являющихся стандартными и выпускаемыми промышленностью со стандартной точностью.
Первый вариант реализации системы управления параметрами объекта, осуществляющей стабилизацию выходного параметра -мощности излучения -, работает следующим образом.
Перед началом управления на задатчике выходного параметра и формирователе управляющего воздействия 7 устанавливаются коэффициенты усиления, обеспечивающие формирование на выходе задатчика выходного параметра 1 и формирователе управляющего воздействия 7 сигналов, пропорциональных требуемой мощности излучения на выходе объекта 4. Сигнал с выхода формирователя управляющего воздействия 7 подается на второй вход блока переключения 6. Сигнал с выхода задатчика управляющего воздействия 1 в момент начала управления подается на первый вход блока формирования разности 2, на второй вход которого подается сигнал с выхода измерителя выходных параметров 5. На выходе блока формирования разности 2 получается сигнал ошибки между входным и выделенным сигналами. Этот сигнал ошибки поступает на третий вход блока переключения 6 и на вход блока управления 3. Сигнал с выхода блока переключения 6 обеспечивает регулирование выходных параметров излучения объекта 4. От светоделительной пластинки лазерное излучение с выхода объекта 4 направляется на измеритель выходного параметра 5. В блоке переключения 6 происходит сравнение модуля сигнала ошибки между входным и выделенным сигналами с пороговым сигналом. На начальном этапе задания входного сигнала, когда модуль сигнала ошибки между входным и выделенным сигналами больше порогового сигнала, на выход блока переключения 6 подается сигнал с выхода формирователя управляющих воздействий 7. Значение выходного параметра объекта 4 изменяется пропорционально величине сигнала с выхода формирователя управляющих воздействий 7. После того как величина выходной мощности объекта 4 приближается к требуемой величине, т. е. модуль сигнала ошибки между входным и выделенным сигналами становится меньше пороговой величины, на выход блока переключения 6 подается сигнал с выхода блока формирования разности 2 и регулирование мощности излучения объекта 4 осуществляется по сигналу ошибки между входным и выделенными сигналами. Следовательно, на начальном этапе задания входного сигнала управление объектом 4 осуществляется в соответствии с сигналом, пропорциональным требуемой мощности излучения на выходе объекта 4, а на этапе отработки входного сигнала в соответствии с сигналом ошибки между входным и выделенным сигналами.
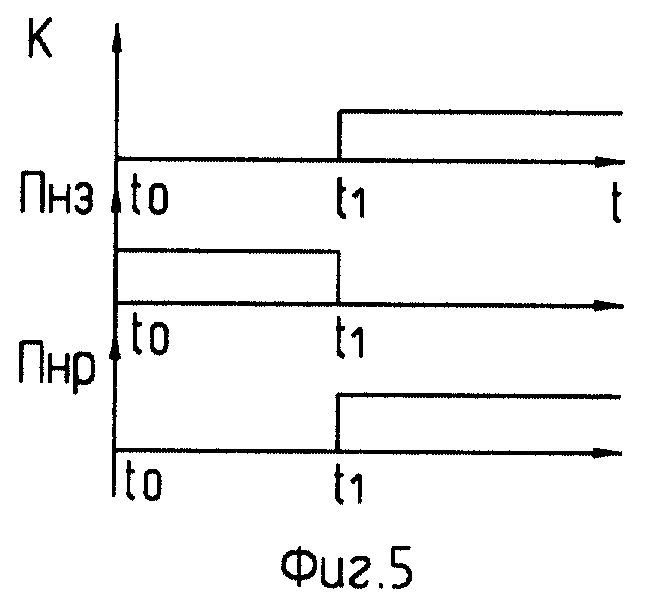
Циклограмма работы компаратора и переключателя блока переключения 6 приведена на фиг. 5. Здесь "1" - компаратор в режиме не превышения порогового сигнала, контакты переключателя замкнуты; "0" - компаратор в режиме превышения порогового сигнала, контакты переключателя разомкнуты; "Пнз - нормально замкнутые контакты переключателя между его вторым входом и выходом; "Пнр" - нормально разомкнутые контакты переключателя между его первым входом и выходом.
Момент времени t1 определяется моментом времени перехода компаратора в режим не превышения порогового сигнала по условию:
MU2 - Uп < U0, (1)
где MU2 = |U1(t)-U5(t)| - модуль сигнала с выхода блока формирования разности 2; U1(t) - сигнал с выхода задатчика выходного параметра 1; U5(t) - сигнал с выхода измерителя выходного параметра 5; t - текущее время; Uп - пороговый сигнал компаратора; U0 - зона нечувствительности компаратора.
В первом варианте реализации системы управления улучшение качества регулирования на начальном этапе задания входного сигнала при сохранении точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала, достигается путем
- задания на выходе формирователя управляющего воздействия 7 сигнала, пропорционального требуемой мощности излучения объекта 4 на начальном участке управления;
- подачи в начальный момент управления с выхода формирователя управляющих воздействий 7 на объект 4 сигнала, пропорционального заданной величине выходного параметра;
- задания порогового сигнала на компаратор блока переключения 6, пропорционального пороговому сигналу;
- формирования в блоке переключения 6 модуля сигнала с выхода блока формирования разности 2;
- сравнения порогового сигнала компаратора блока переключения 6 с модулем сигнала с выхода блока формирования разности 2;
- при не превышении модуля сигнала с выхода блока формирования разности 2 порогового сигнала компаратора блок переключения 6 формирования с помощью элементов 2, 3 и 6 управляющего сигнала, обеспечивающего точную отработку системой заданного воздействия на выходе объекта 4;
- определенной последовательностью соединения вновь вводимых элементов 6 и 7 и выполнением определенных параметрических соотношений.
Обосновать работу первого варианта системы управления можно следующим образом.
Для момента времени t0-t1, когда только началось управление объектом 1, значение выходного параметра объекта 1 значительно отличается от требуемой величины и модуль сигнала ошибки между входным и выделенным сигналами больше порогового сигнала
|U1(t)-U5(t)|>Uп. (2)
В этом интервале времени сигнал управления, формируемый на выходе блока переключения 6, имеет вид
U6(t) = U7(t), (3)
где U7(t) - сигнал с выхода формирователя управляющего воздействия 7.
Момент времени t1 характеризуется уменьшением величины модуля сигнала ошибки между входным и выделенным сигналами до величины порогового сигнала (1).
В момент времени t1 сигнал управления, формируемый на выходе блока переключения 6, имеет вид
U6(t1) = W3 • (U1(t1) - U5(t1)), (4)
где W3 - передаточная функция блока управления 3.
В момент времени t1 на вход объекта 4 подается сигнал управления (4). При этом, так как за время с t0 до t1 измеренное значение выходного параметра объекта 4 увеличилось U5(t1) > U5(t0), то для величины ошибки U2(t1) = (Ul(t1) - U5(t1)) будет справедливо |U2(t1)|<|U2(to)|.
Для объекта, описанного в [5], величина перерегулирования будет равна
σo = (U9max-U1)•100%/U1, (5)
где U9max = U1-Uп+Uп•σc, σc - величина перерегулирования замкнутой системы. Чем меньше сигнал Uп, тем меньше величина перерегулирования. Если Uп ---> 0, то и σo ---> 0. Что обеспечивает в системе уменьшение величины перерегулирования на начальном этапе отработки входного сигнала.
Для объекта 4, являющегося, например, CO2 лазером, такое управление на начальном участке до t1 обеспечивает предварительный разогрев лазера.
Для момента времени t > t1, когда измеренное значение выходного параметра находится в заданных пределах, определяемых пороговым сигналом, управление, формируемое на выходе блока переключения 6, имеет вид
U6(t) = W3 • (U1(t) - U5(t)). (6)
В этом интервале времени система работает по отклонению и характеризуется высокой точностью отработки входного сигнала, присущему системам с обратной связью.
Анализ формул (1)...(6) показывает, что в рассматриваемой системе обеспечивается уменьшение величины перерегулирования на начальном этапе задания входного сигнала и сохранение высокой точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала.
Второй вариант реализации системы управления параметрами объекта работает следующим образом.
Перед началом управления в формирователе управляющего воздействия 7 устанавливается коэффициент усиления, обеспечивающий выработку на выходе формирователя управляющего воздействия 7 сигнала управления объектом 11 на начальном участке управления. Сигнал с выхода формирователя управляющего воздействия 7 подается на второй вход блока переключения 6. Сигнал от задатчика управляющего воздействия 8 через измеритель входного сигнала 9 поступает на первый вход измерителя выходного параметра 10, на второй вход которого подается сигнал с выхода объекта 11. На выходе измерителя выходного параметра 10 получается сигнал ошибки между входным и выделенным сигналами. Этот сигнал ошибки поступает на третий вход блока переключения 6 и на вход блока управления 3, сигнал с выхода которого поступает на первый вход блока переключения 6. Сигнал из блока переключения 6 обеспечивает изменение положения объекта 11. В блоке переключения 6 происходит сравнение модуля сигнала ошибки между входным и выделенным сигналами с пороговым сигналом. На начальном этапе задания входного сигнала, когда модуль сигнала ошибки между входным и выделенным сигналами больше порогового сигнала, на выход блока переключения 6 подается сигнал с выхода формирователя управляющих воздействий 7. Положение объекта 11 изменяется пропорционально сигнала с выхода формирователя управляющих воздействий 7. После того положение объекта 11 относительно входного сигнала становится меньше пороговой величины, т.е. модуль сигнала ошибки между входным и выделенным сигналами становится меньше пороговой величины, на выход блока переключения 6 подается сигнал с выхода блока формирования разности 2, и регулирование положением объекта 11 относительно входного сигнала осуществляется по сигналу ошибки между входным и выделенными сигналами. Следовательно, на начальном этапе задания входного сигнала управление объектом 11 осуществляется в соответствии с сигналом, пропорциональным входному сигналу, а на этапе отработки входного сигнала в соответствии с сигналом ошибки между входным и выделенным сигналами.
Циклограмма работы компаратора и переключателя блока переключения 6 приведена на фиг. 5. Здесь "1" - компаратор в режиме не превышения порогового сигнала, контакты переключателя замкнуты; "0" - компаратор в режиме превышения порогового сигнала, контакты переключателя разомкнуты; "Пнз" - нормально замкнутые контакты переключателя между его вторым входом и выходом; "Пнр" - нормально разомкнутые контакты переключателя между его первым входом и выходом.
Момент времени t1 определяется моментом времени перехода компаратора в режим не превышения порогового сигнала по условию
MU10-Uп<U0, (6)
где MU10 = |U9(t)-U11(t)| - модуль сигнала с выхода измерителя выходного параметра 10; U9(t) - сигнал с выхода измерителя входного сигнала 9; U11(t) - сигнал с выхода объекта 11.
Во втором варианте реализации системы управления улучшение качества регулирования на начальном этапе задания входного сигнала при сохранении точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала, достигается путем
- задания на выходе формирователя управляющего воздействия 7 сигнала, пропорционального требуемому времени вывода объекта 11 на начальном участке управления;
- подачи в начальный момент управления с выхода формирователя управляющих воздействий 7 через блок 6 на объект 11 сигнала, пропорционального требуемого времени начального участка;
- задания порогового сигнала на компаратор блока переключения 6, пропорционального пороговому сигналу;
- формирования в блоке переключения 6 модуля сигнала с выхода измерителя выходного параметра 10;
- сравнения порогового сигнала компаратора блока переключения 6 с модулем сигнала с выхода измерителя выходного параметра 10;
- при не превышении модуля сигнала с выхода измерителя выходного параметра 10 порогового сигнала Uп формирования с помощью элементов 10, 3 и 6 управляющего сигнала, обеспечивающего точную отработку системой заданного воздействия объектом 11;
- определенной последовательностью соединения вновь вводимых элементов 6 и 7 и выполнением определенных параметрических соотношений.
Обосновать работу второго варианта системы управления можно следующим образом.
Для момента времени t0...t1, когда только началось управление объектом 11, положение объекта 11 значительно отличается от требуемой величины и модуль сигнала ошибки между входным и выделенным сигналами больше порогового сигнала:
|U9(t)-U11(t)|>Uп. (7)
В этом интервале времени сигнал управления, формируемый на выходе блока переключения 6, имеет вид U6(t) = U7(t). (8)
Момент времени t1 характеризуется уменьшением величины модуля сигнала ошибки между входным и выделенным сигналами до величины порогового сигнала (6).
В момент времени t1 сигнал управления, формируемый на выходе блока переключения 6, имеет вид
U6(t1)=W3 • (U9(t1)-U11(t1)). (9)
Чем больше величина команд управления (8), подаваемых на объект 11 до t1, тем меньше время начального этапа отработки входного сигнала, т.е. если U6a > U6б, то t1a < t1б. (10)
Это обеспечивает в системе сокращение времени начального этапа отработки входного сигнала.
Для момента времени t > t1, когда измеренное положение объекта 11 находится в заданных пределах, определяемых пороговым сигналом, управление, формируемое на выходе блока переключения 6, имеет вид
U6(t) = W3 • (U9(t) - (U11(t)). (11)
В этом интервале времени система работает по отклонению и характеризуется высокой точностью отработки входного сигнала присущему системам с обратной связью.
Анализ формул (7). . . (11) показывает, что в рассматриваемой системе обеспечивается уменьшение времени начального этапа задания входного сигнала и сохранение высокой точности, регулирования характерного для метода управления по отклонению на этапе отработки входного сигнала.
Третий вариант реализации системы управления параметрами объекта работает следующим образом.
Перед началом управления в формирователе управляющего воздействия 7 устанавливается коэффициент усиления, обеспечивающий выработку на выходе формирователя управляющего воздействия 7 сигнала управления объектом 11 на начальном участке управления. Сигнал с выхода формирователя управляющего воздействия 7 подается на второй вход блока переключения 6. Сигнал от задатчика управляющего воздействия 8 через измеритель входного сигнала 9 поступает на первый вход блока формирования разности 2, на второй вход которого подается сигнал с выхода измерителя выходного параметра 13. На выходе блока формирования разности 2 получается сигнал ошибки между входным и выделенным сигналами, который поступает на вход блока управления 3. Сигнал с выхода блока управления поступает на первый вход блока переключения 6, на третий вход которого поступает сигнал от измерителя выходного параметра 13. Сигнал с выхода блока переключения 6 обеспечивает изменение положения объекта 11. Величина изменения положения объекта фиксируется измерителем выходного параметра 13. В блоке переключения 6 происходит сравнение модуля сигнала ошибки между входным и выделенным сигналами с пороговым сигналом. На начальном этапе задания входного сигнала, когда модуль сигнала ошибки между входным и выделенным сигналами больше порогового сигнала, на выход блока переключения 6 подается сигнал с выхода формирователя управляющих воздействий 7. Положение объекта 11 изменяется пропорционально величине сигнала с выхода формирователя управляющих воздействий 7. После того положение объекта 11 относительно входного сигнала становится меньше пороговой величины, т.е. модуль сигнала ошибки между входным и выделенным сигналами становится меньше пороговой величины, на выход блока переключения 6 подается сигнал с выхода блока формирования разности 2, и регулирование положением объекта 11 относительно входного сигнала осуществляется по сигналу ошибки между входным и выделенными сигналами. Следовательно, на начальном этапе задания входного сигнала управление объектом 11 осуществляется в соответствии с сигналом, пропорциональным входному сигналу, а на этапе отработки входного сигнала в соответствии с сигналом ошибки между входным и выделенным сигналами.
Циклограмма работы компаратора и переключателя блока переключения 6 приведена на фиг. 5. Здесь "1" - компаратор в режиме не превышения порогового сигнала, контакты переключателя замкнуты; "0" - компаратор в режиме превышения порогового сигнала, контакты переключателя разомкнуты; "Пнз" - нормально замкнутые контакты переключателя между его вторым входом и выходом; "Пнр" - нормально разомкнутые контакты переключателя между его первым входом и выходом.
Момент времени t1 определяется моментом времени перехода компаратора в режим не превышения порогового сигнала по условию
MU2-Uп < U0, (12)
где MU2 = |U12(t)-U13(t)| - модуль сигнала с выхода блока формирования разности 2; U12(t) - сигнал с выхода измерителя входного сигнала 12; U13(t) - сигнал с выхода измерителя выходного параметра 13.
В третьем варианте реализации системы управления улучшение качества регулирования на начальном этапе задания входного сигнала при сохранении точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала, достигается путем
- задания на выходе формирователя управляющего воздействия 7 сигнала, пропорционального требуемому времени вывода объекта 11 на начальном участке управления;
- подачи в начальный момент управления с выхода формирователя управляющих воздействий 7 через блок 6 на объект 11 сигнала, пропорционального требуемому времени начального участка;
- задания порогового сигнала на компаратор блока переключения 6, пропорционального пороговому сигналу;
- формирования в блоке переключения 6 модуля сигнала с выхода измерителя выходного параметра 13;
- сравнения порогового сигнала компаратора блока переключения 6 с модулем сигнала с выхода измерителя выходного параметра 13;
- при не превышении модуля сигнала с выхода измерителя выходного параметра 13 порогового сигнала Uп формирования с помощью элементов 2, 3, 6, 12 и 13 управляющего сигнала, обеспечивающего точную отработку системой заданного воздействия объектом 11;
- определенной последовательностью соединения вновь вводимых элементов 6 и 7 и выполнением определенных параметрических соотношений.
Обосновать работу третьего варианта системы управления можно следующим образом.
Для момента времени t0...t1, когда только началось управление объектом 11, значение положения объекта 11 значительно отличается от требуемой величины и модуль сигнала ошибки между входным и выделенным сигналами больше порогового сигнала:
|U12(t)-U13(t)|>Uп. (13)
В этом интервале времени сигнал управления, формируемый на выходе блока переключения 6, имеет вид U6(t) = U7(t). (14)
Момент времени t1 характеризуется уменьшением величины модуля сигнала ошибки между входным и выделенным сигналами до величины порогового сигнала (12).
В момент времени t1 сигнал управления, формируемый на выходе блока переключения 6, имеет вид
U6(t1) = W3 • (U12(t1) - U13(t1)). (15)
Чем больше величина команд управления (14), подаваемых на объект 11 до t1, тем меньше время начального этапа отработки входного сигнала, т.е. если U6a > U6б, то t1a < t1б. (16)
Это обеспечивает в системе сокращение времени начального этапа отработки входного сигнала.
Для момента времени t > t1, когда измеренное положение объекта 11 находится в заданных пределах, определяемых пороговым сигналом, управление, формируемое на выходе блока переключения 6, имеет вид
U6(t) = W3 • (U12(t) - U13(t)) (17)
В этом интервале времени система работает по отклонению и характеризуется высокой точностью отработки входного сигнала, присущему системам с обратной связью.
Анализ формул (12)...(17) показывает, что в рассматриваемой системе обеспечивается уменьшение времени начального этапа задания входного сигнала и сохранение высокой точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала.
Четвертый вариант реализации системы управления параметрами объекта работает следующим образом.
Перед началом управления в формирователе управляющего воздействия 7 устанавливается коэффициент усиления, обеспечивающий выработку на выходе формирователя управляющего воздействия 7 сигнала управления объектом 11 на начальном участке управления. Сигнал с выхода формирователя управляющего воздействия 7 подается на второй вход блока переключения 6. Сигнал от задатчика управляющего воздействия 8 поступает на первый вход измерителя выходного параметра 14, на второй вход которого подается сигнал с выхода объекта 11. На выходе измерителя выходного параметра 14 получается сигнал ошибки между входным и выделенным сигналами, который поступает на третий вход блока переключения 6 и на вход блока управления 3. Сигнал с выхода блока управления поступает на первый вход блока переключения 6, сигнал с выхода которого обеспечивает изменение положения объекта 11. В блоке переключения 6 происходит сравнение модуля сигнала ошибки между входным и выделенным сигналами с пороговым сигналом. На начальном этапе задания входного сигнала, когда модуль сигнала ошибки между входным и выделенным сигналами больше порогового сигнала, на выход блока переключения 6 подается сигнал с выхода формирователя управляющих воздействий 7. Положение объекта 11 изменяется пропорционально величине сигнала с выхода формирователя управляющих воздействий 7. После того положение объекта 11 относительно входного сигнала становится меньше пороговой величины, т.е. модуль сигнала ошибки между входным и выделенным сигналами становится меньше пороговой величины, на выход блока переключения 6 подается сигнал с выхода блока формирования разности 2, и регулирование положением объекта 11 относительно входного сигнала осуществляется по сигналу ошибки между входным и выделенными сигналами. Следовательно, на начальном этапе задания входного сигнала управление объектом 11 осуществляется в соответствии с сигналом, пропорциональным входному сигналу, а на этапе отработки входного сигнала в соответствии с сигналом ошибки между входным и выделенным сигналами.
Циклограмма работы компаратора и переключателя блока переключения 6 приведена на фиг. 5. Здесь "1" - компаратор в режиме не превышения порогового сигнала, контакты переключателя замкнуты; "0" - компаратор в режиме превышения порогового сигнала, контакты переключателя разомкнуты; "Пнз" - нормально замкнутые контакты переключателя между его вторым входом и выходом; "Пнр" - нормально разомкнутые контакты переключателя между его первым входом и выходом.
Момент времени t1 определяется моментом времени перехода компаратора в режим не превышения порогового сигнала по условию
MU14-Uп < U0, (18)
где MU14 = |U8(t)-U11(t)| - модуль сигнала с выхода измерителя выходного параметра 14; U8(t) - сигнал с выхода задатчика выходного параметра 8.
В четвертом варианте реализации системы управления улучшение качества регулирования на начальном этапе задания входного сигнала при сохранении точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала, достигается путем
- задания на выходе формирователя управляющего воздействия 7 сигнала, пропорционального требуемому времени вывода объекта 11 на начальном участке управления;
- подачи в начальный момент управления с выхода формирователя управляющих воздействий 7 через блок 6 на объект 11 сигнала, пропорционального требуемому времени начального участка;
- задания порогового сигнала на компаратор блока переключения 6, пропорционального пороговому сигналу;
- формирования в блоке переключения 6 модуля сигнала с выхода измерителя выходного параметра 14;
- сравнения порогового сигнала компаратора блока переключения 6 с модулем сигнала с выхода измерителя выходного параметра 14;
- при не превышении модуля сигнала с выхода измерителя выходного параметра 14 порогового сигнала Uп формирования с помощью элементов 3, 6 и 14 управляющего сигнала, обеспечивающего точную отработку системой заданного воздействия объектом 11;
- определенной последовательностью соединения вновь вводимых элементов 6 и 7 и выполнением определенных параметрических соотношений.
Обосновать работу четвертого варианта системы управления можно следующим образом.
Для момента времени t0...t1, когда только началось управление объектом 11, значение положения объекта 11 значительно отличается от требуемой величины и модуль сигнала ошибки между входным и выделенным сигналами больше порогового сигнала:
|U8(t)-U11(t)|>Un. (19)
В этом интервале времени сигнал управления, формируемый на выходе блока переключения 6, имеет вид U6(t) = U7(t). (20)
Момент времени t1 характеризуется уменьшением величины модуля сигнала ошибки между входным и выделенным сигналами до величины порогового сигнала (18).
В момент времени t1 сигнал управления, формируемый на выходе блока переключения 6, имеет вид
U6(t1) = W3 • (U8(t1) - U11(t1)). (21)
Чем больше величина команд управления (20), подаваемых на объект 11 до t1, тем меньше время начального этапа отработки входного сигнала, т.е. если U6a > U6б, то t1a < t1б. (22)
Это обеспечивает в системе сокращение времени начального этапа отработки входного сигнала.
Для момента времени t > t1, когда измеренное значение положения объекта 11 находится в заданных пределах, определяемых пороговым сигналом, управление, формируемое на выходе блока переключения 6, имеет вид
U6(t) = W3 • (U8(t) - U11(t)). (23)
В этом интервале времени система работает по отклонению и характеризуется высокой точностью отработки входного сигнала, присущему системам с обратной связью.
Анализ формул (18)...(23) показывает, что в рассматриваемой системе обеспечивается уменьшение времени начального этапа задания входного сигнала и сохранение высокой точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала.
Таким образом, предлагаемый способ управления параметрами объекта и система управления для его осуществления (варианты) обеспечивают уменьшение величины перерегулирования и уменьшение времени начального этапа задания входного сигнала и сохранение высокой точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала, за счет формирования управляющего воздействия объектом на начальном этапе задания входного сигнала пропорционально заданной величине выходного параметра с последующим переходом на этапе отработки входного сигнала к формированию управляющего воздействия объектом, пропорционального разности между входным и выделенным сигналами.
Следовательно, использование новых элементов 6...7, соединенных в соответствии с фиг. 1...5 с указанными характеристиками (1)...(23) в предлагаемой системе управления выгодно отличает предлагаемое техническое решение от прототипа, так как обеспечивает улучшение качества регулирования выходными параметрами объекта на начальном этапе задания входного сигнала при сохранении высокой точности регулирования, характерного для метода управления по отклонению на этапе отработки входного сигнала.
СПИСОК ЛИТЕРАТУРЫ.
1. Способ управления параметрами излучения лазера и система управления для его осуществления. Патент (Россия) 2091942 от 25 декабря 1997 г.
2. Солдатов А. Н. , Соломонов В.И. Газоразрядные лазеры на самоограниченных переходах в парах металла. Новосибирск: Наука, 1985, с. 93-102, рис. 4.7.
3. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965.
4. Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. М.: Радио и связь, 1981.
5. 1993 Laser Diode Product Catalog.- 80 Rose Orchard Way San Jose, CA 95134-1365, USA.
6. Горбацевич Е. Д., Левинзон Ф.Ф. Аналоговое моделирование систем управления. М.: Наука, 1984.
7. Лазарев Л.П. Инфракрасные и световые приборы самонаведения летательных аппаратов. М., Машиностроение, 1976.
8. Оптико-электронные приборы космической аппаратуры. Изнар А.Н., Павлов А.В., Федоров Б.Ф. М., Машиностроение, 1972.
9. Кочетов В.Т., Половко А.М., Пономарев В.М. Теория систем телеуправления и самонаведения ракет. М.: Наука, 1964.
10. Белянский П.В., Сергеев Б.Б. Управление наземными антеннами и радиотелескопами. М.: Сов радио, 1980.
Изобретение относится к лазерной технике и автоматическим системам и может быть использовано в научно-исследовательских, технологических, медицинских, метрологических и других установках. Предлагаемый способ обеспечивает уменьшение величины перерегулирования и уменьшение времени начального этапа задания входного сигнала. Способ сохраняет высокую точность регулирования для метода управления по отклонению на этапе отработки входного сигнала. Технический результат изобретения: улучшение качества регулирования выходными параметрами объекта. 5 с.п. ф-лы, 5 ил.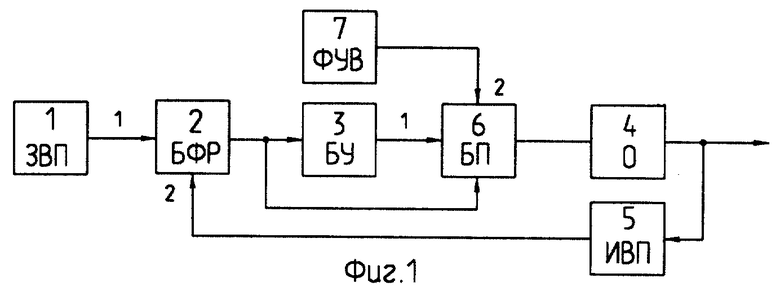
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ ЛАЗЕРА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2091942C1 |
| Солдатов А.Н., Соломонов В.И | |||
| Газоразрядные лазеры на самоограниченных переходах в парах металла.-Новосибирск: Наука, 1985, с.93-102 | |||
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Система автоматической идентификации | 1985 |
|
SU1308983A1 |
