Изобретение относится к управлению и регулированию, а более конкретно - к управляемому вооружению.
Для поражения целей ракетами известен ряд способов наведения. Способ управления [см. 1, стр. 184] заключается в сопровождении цели оптическим визиром и сопровождении ракеты аппаратурой выделения координат. В наземной аппаратуре вырабатывают команды управления, которые затем передаются на борт ракеты и отклоняют последнюю в сторону перемещающейся цели. На экране оптического визира фиксируется проекция изображения цели; отображение инфракрасного трассера фиксируется в аппаратуре выделения координат. Координаты цели определяются по отклонениям проекции в вертикальной и горизонтальной плоскостях относительно оптической оси визира, направленной на цель. Координаты ракеты определяются по отклонениям проекции ракеты от оси аппаратуры выделения координат. Величины сигналов отклонений проекций цели и ракеты поступают в устройство выработки команд управления ракетой, а величины сигналов отклонений цели - на управление оптическим визиром. При появлении тепловой помехи в поле аппаратуры выделения координат, управление ракетой переводится в инерционный режим управления с использованием модели ракеты. Недостатком этого способа является необходимость использования двух систем сопровождения: оптического визира цели и аппаратуры выделения координат ракеты.
Известен также способ автоматического распознавания помехи [см. 2, стр. 446-453]. Он заключается в определении яркости изображения в конкретной точке поля зрения и сравнении ее со значением яркости соседних точек. Этот способ используется как составная часть способов наведения ракеты.
В качестве прототипа выбраны способ и система наведения, описанная в патенте США N 3567163 [3]. Способ наведения ракеты заключается в разделении сигналов от цели и ракеты, поступающие с оптико-электронного пеленгатора, на 2 луча на основе различных спектров излучения, определении координат цели по первому стробу оптико-электронного пеленгатора, определении текущих координат ракеты по второму стробу оптико-электронного пеленгатора, последовательную выработку сигналов команд управления ракетой по текущим координатам цели и ракеты, передачу команд управления на борт и отработку их ракетой, автоматическое управление первым стробом по координатам цели, задание координат ракеты с модели и автоматическое управление вторым стробом по координатам ракеты и с пульта оператора, отображение на мониторе цели, ракеты, первого и второго стробов, а также тепловых помех.
Система наведения использует оптико-электронную систему для приема энергии, излучаемой как целью, так и ракетой. Оптико-электронная система имеет пеленгатор с двумя приводами наведения и приспособление, позволяющее разделить спектр излучения цели от спектра излучения ракеты, которые преобразуются в электрические сигналы. Эти электрические сигналы подаются на телевизионную трубку монитора, где воспроизводится все поле зрения пеленгатора. На мониторе воспроизводятся цель и ракета в виде соответствующих изображений и сопровождаются соответственно первым и вторым стробам. Первый строб позволяет определить координаты цели относительно оптической оси пеленгатора, второй строб - координаты ракеты относительно оптической оси пеленгатора. Использование стробов позволяет автоматически фиксировать перемещение объектов по экрану, анализируя яркости точек не всего экрана, а ограниченные области в поле строба. Управление приводами пеленгатора осуществляется таким образом, чтобы вывести изображение цели в центр экрана. При совершении целью маневра, изображение цели смещается относительно центра экрана. Строб следит за смещением цели и смещается вслед за целью. Управление вторым стробом осуществляется таким образом, чтобы трассер ракеты был в центре второго строба. По координатам второго строба определяются текущие координаты отклонений ракеты в вертикальной и горизонтальной плоскостях от линии визирования цели, которые используются для выработки команд управления ракетой. Система управления имеет модель ракеты, которая используется для фильтрации координат ракеты, для задания начальных условий работы вторым стробом.
В составе оптико-электронной системы сопровождения цели могут быт использованы или тепловизионный пеленгатор, или телевизионный пеленгатор.
Недостатком прототипа является то, что при появлении тепловой помехи наведения ракеты передается в ручной режим управления, тем самым снижается надежность и эффективность комплекса. Кроме того, разделение лучей от цели и ракеты по спектрам на два луча, обрабатываемые раздельно, требуют высокой точности юстировок видиконов.
Задачей изобретения является повышение надежности и эффективности комплекса при действии тепловых помех за счет перехода в автоматический инерционный управляемый режим полета ракеты с момента появления тепловой помехи.
Указанная задача выполняется за счет того, что в известном способе управления ракетой, включающем определение координат цели по первому стробу оптико-электронного пеленгатора, определение координат ракеты по второму стробу оптико-электронного пеленгатора и с модели, последовательную выработку команд управления ракетой по текущим координатам цели и ракеты, передачу команд управления на борт и отработку их ракетой, автоматическое управление первым стробом по координатам цели, отображение на мониторе цели, ракеты, первого и второго стробов, тепловых помех, постоянно производят распознавание присутствия в поле второго строба пеленгатора тепловой помехи, а с момента появления тепловой помехи в поле второго строба до ее выхода из поля второго строба пеленгатора определение координат ракеты осуществляют по координатам, получаемым с модели ракеты, после выхода помехи за пределы второго строба определение координат ракеты передают в исходный режим управления по координатам второго строба пеленгатора.
Управление ракетой по предлагаемому способу осуществляется следующим способом. Исходным является режим, когда оптико-электронный пеленгатор, например тепловизор, первым стробом сопровождает цель. После пуска ракеты в сторону цели через определенное время ракета появляется на экране тепловизора, ее изображение захватывается вторым стробом пеленгатора и управление ракетой осуществляется по координатам второго строба. Первый строб позволяет определить координаты цели относительно оптической оси тепловизора, второй строб - координаты ракеты относительно оптической оси тепловизора. Управление приводами тепловизора осуществляется таким образом, чтобы вывести изображение цели в центр экрана тепловизора. При совершении целью маневра, изображение цели смещается относительно центра экрана. Первый строб следит за смещением цели и смещается вслед за целью. По координатам вертикальных и горизонтальных смещений первого строба привода вертикального и горизонтального наведения автоматически разворачивают пеленгатор вслед за целью. Ракета в сторону цели движется по программной траектории, причем траектория выбирается таким образом, чтобы трассер ракеты до подхода к цели не перекрывал цель. Управление вторым стробом осуществляется так, чтобы трассер ракеты был в центре второго строба. По координатам второго строба определяются текущие координаты ракеты, которые используются для выработки команд управления ракетой. Одновременно с определением координат цели и ракеты система управления осуществляет моделирование полета ракеты с учетом тех же команд управления, которые передаются на борт ракеты. По текущим координатам ракеты на модели прогнозируется, в каких точках пространства она будет находится в следующий момент времени. Эти координаты модели ракеты используются в известных способах управления ракетой при фильтрации и в инерционных режимах, когда исчезает трассер из поля видимости.
При реализации рассматриваемого автоматического режима постоянно проводится анализ появления в поле второго строба тепловизора источника тепловой энергии, интенсивность которого превышает интенсивность теплового излучения ракеты. При появлении такого источника тепловой энергии в поле второго строба тепловизора автоматически в обнаружителе помехи вырабатывается сигнал определенного уровня, например "1", а при отсутствии тепловой помехи вырабатывается сигнал другого уровня, например "0". Режимы сопровождения цели в условиях помех широко известны и не являются предметом рассмотрения в данном техническом решении. Наиболее критической, с точки зрения помех, является ситуация, когда ракета приближается к цели и первый и второй стробы начинают совмещаться, а цель отстреливает тепловую помеху и помеха появляется в области второго строба. Если остаться в автоматическом режиме сопровождения ракеты, то команды управления ракетой будут вырабатываться, принимая падающую тепловую помеху за координаты трассера ракеты; такие команды уведут ракету в сторону от цели. В предлагаемом способе с момента появления тепловой помехи в области второго строба до ее выхода из поля второго строба определение координат ракеты ведется с модели ракеты. Управление вторым стробом при этом может осуществляться либо по координатам ракеты, получаемым с модели, либо стоять в точке, где последний раз фиксировалась ракеты, либо следовать по координатам тепловой помехи пои постоянном сравнении координат второго строба с координатами ракеты, получаемым с модели. В момент выхода тепловой помехи за пределы второго строба, на выходе обнаружителя помехи восстанавливается первоначальный сигнал и включается исходный режим сопровождения ракеты. При этом устанавливается наличие изображения трассера в области второго строба, строб начинает сопровождать трассер и с использованием координат строба вырабатываются команды управления ракетой.
С целью сокращения времени отрицательного влияния помехи на управление ракетой в развитие предлагаемого способа разработан первый дополнительный способ управления ракетой, когда при подлетном времени ракеты к цели, превышающем 1-2 секунды, с момента появления тепловой помехи в поле второго строба до ее выхода из поля второго строба в сигналы команд управления добавляют дополнительные сигналы, уводящие ракету в сторону от тепловой помехи. Рекомендуется, в частности, в сигналы команд управления добавлять дополнительные сигналы, уводящие ракету вверх относительно помехи. При этом исключается возможность врезаться в землю при движении цели и ракеты у поверхности земли.
Дополнительные сигналы должны обеспечивать отвод ракеты от помехи и как следствие освободить от помехи второй строб. Как правило, величина дополнительных сигналов не должна превышать 0,1 - 0,3% максимальной амплитуды команд, а по знаку соответствовать выводу ракеты, например, вверх. Продолжительность действия этих сигналов не превосходит 0,2 - 0,4 с, пока координаты ракеты не будут отличаться от координат помехи на величину, превышающую размер поля зрения второго строба пеленгатора. Дополнительный сигнал может, например, уводить ракету вверх от помехи. Если ракета появляется при подлете ракеты и цели, когда подлетное время менее допустимой величины, дополнительные сигналы в команды управления не добавляются, так как они бы увели ракету от цели. Когда подлетное время ракеты и цели более допустимой величины, при появлении тепловой помехи удается сделать маневр ракеты, уводящий ее от помехи и повысить точность поражения цели.
С целью обеспечения минимального времени влияния тепловой помехи на управление ракетой в развитие предлагаемого дополнительного способа разработан второй дополнительный способ управления ракетой, где постоянно производят распознавание присутствия в поле второго строба пеленгатора тепловой помехи, а с момента появления тепловой помехи в поле второго строба до ее выхода из поля второго строба пеленгатора сопровождение помехи производят третьим стробом и определяют скорость перемещения помех по полю пеленгатора, а определение координат ракеты осуществляют по координатам, получаемым с модели ракеты. При появлении тепловой помехи в поле второго строба до ее выхода из поля дополнительные сигналы, добавленные в команды управления и уводящие ракету в сторону от тепловой помехи, направлены в сторону противоположную движению тепловой помехи по полю пеленгатора, а управление вторым стробом ведут по координатам модели ракеты.
Для реализации второго дополнительного способа управления в систему управления дополнительно вводится устройство сопровождения теплового объекта на экране тепловизора третьим стробом. Для этого используется дополнительный видеопроцессор, аналогичный видеопроцессорам первого и второго строба. Захват и сопровождение тепловой помехи третьим стробом ведется известными способами, которые используются, например, для захвата и сопровождения ракеты вторым стробом. Скорость перемещения тепловой помехи по полю пеленгатора определяется по двум или нескольким последовательным замерам координат тепловой помехи.
Дополнительные сигналы должны обеспечить отвод ракеты от помехи и как следствие освободить от помехи второй строб. Как правило, величина дополнительных сигналов не должна превышать 0,1 - 0,3% максимальной амплитуды команд. Продолжительность действия этих сигналов не превосходит 0,2 - 0,3 с., пока координаты ракеты не будут отличаться от координат помехи на величину, превышающую размер поля зрения второго строба пеленгатора. Дополнительные сигналы уводят ракету в сторону, противоположную движению тепловой помехи.
В отличие от исходного предлагаемого способа управления, второй дополнительный способ управления позволяет сократить время инерционного режима управления ракетой при наличии помехи в поле второго строба в 1,5 - 3 раза, но для своей реализации требует ввода в систему управления дополнительных блоков управления третьим стробом, первого и второго сумматоров, задатчика дополнительных сигналов, второго коммутатора, вычислителя скоростей, блока произведений.
С целью уменьшения влияния тепловой помехи на управление ракетой и отказе от использования третьего дорогостоящего видеопроцессора для третьего строба в предлагаемом первом дополнительном способе разработан третий дополнительный способ, в котором с момента появления тепловой помехи в поле второго строба до ее выхода из поля второго строба, вторым стробом производят сопровождение тепловой помехи, ведут сравнение координат ракеты с координатами поля зрения второго строба, определяют скорость перемещения помехи по полю пеленгатора и в сигналы команд управления добавляют дополнительные сигналы, уводящие ракету в сторону, противоположную движению тепловой помехи по полю пеленгатора, а после установления отличий значений координат ракеты от координат поля второго строба управление вторым стробом передают в исходный режим управления по координатам модели ракеты с последующим определением координат ракеты по второму стробу пеленгатора.
Для реализации описанного основного способа в систему управления ракетой, содержащую оптико-электронный пеленгатор с приводами наведения в горизонтальной и вертикальной плоскостях, электронную систему сопровождения цели, выход которой подключен к приводам наведения, электронную систему сопровождения ракеты, включающую последовательно соединенные датчик координат ракеты, блок выработки команд управления и передатчик команд на управляемую ракету, причем выход датчик координат ракеты соединен с первым входом блока выработки команд, а второй вход блока выработки команд подключен к выходу электронной системы сопровождения цели, монитор для изображения цели, ракеты, первого и второго стробов, систему слежения первого строба за изображением цели, выход которой по координатам первого строба подключен к монитору и ко входу электронной системы сопровождения цели, систему слежения второго строба, модель ракеты, первый вход которой подключен к датчику вертикальных и горизонтальных координат ракеты, введены обнаружитель помехи, первый коммутатор, второй коммутатор, управляющий вход которого подключен к обнаружителю тепловой помехи в поле второго строба, второй вход модели ракеты подключен ко входу передатчика команд, вход системы слежения второго строба через нормально замкнутые контакты второго коммутатора подключен к выходу пеленгатора, а через нормально разомкнутые контакты - к выходу модели ракеты, входы датчика координат ракеты через нормально замкнутые контакты первого коммутатора подключены к выходу системы слежения второго строба и через нормально разомкнутые контакты первого коммутатора к выходу модели ракеты.
На фиг. 1 представлена блок-схема системы управления ракетой.
Система управления ракетой включает в себя оптико-электронный пеленгатор с приводами наведения 1, электронную систему сопровождения цели 2, выход которой подключен к приводам наведения, электронную систему сопровождения ракеты, содержащую последовательно подключенные блок выработки команд 4 и передатчик команд 5, второй вход блока выработки команд 4 подключен к выходу системы сопровождения цели 2, монитор 6 для изображения цели, ракеты, первого и второго стробов, систему 7 слежения первого строба за изображением цели, выход которой по координатам первого строба подключен к монитору 6 и ко входу электронной системы сопровождения цели 2, систему слежения второго строба 8, модель ракеты 9, датчик координат ракеты 10, обнаружитель помехи 11, выход которого подключен ко входу первого коммутатора 12 и ко входу второго коммутатора 13.
Оптико-электронный пеленгатор 1, преобразует излучение от цели и ракеты в электрические сигналы, поступающие в систему сопровождения цели 2, систему сопровождения ракеты 3, монитор 6. Выход системы слежения первого строба 7 подключен ко входу монитора 6 и ко входу системы сопровождения цели 2. Система слежения первого строба 7 позволяет по контрасту теплового или телевизионного изображения определить координаты цели относительно оптической оси тепловизора. Система слежения второго строба 8 позволяет определить координаты ракеты относительно оптической оси тепловизора. Управление приводами осуществляется таким образом, чтобы вывести изображение цели в центр экрана. По координатам первого строба привода автоматически разворачивают пеленгатор вслед за целью. По координатам второго строба определяются текущие координаты ракеты, которые из системы слежения второго строба 8 поступают в датчик координат ракеты 10 и используются для выработки команд управления ракетой. Одновременно с сопровождением цели и ракеты системой наведения осуществляется моделирование полета ракеты с использованием модели ракеты 9. По координатам цели и ракеты блок выработки команд 4 вырабатывает команды управления, которые передаются на ракету и на второй вход модели ракеты 9. Обнаружитель помехи 11 постоянно осуществляет анализ яркости точек поля второго строба известными методами [см. 4, стр. 128-135]. При появлении тепловой помехи в поле второго строба в обнаружителе помехи [4, стр. 128-130] , вход которого подключен к пеленгатору 1, вырабатывается сигнал определенного уровня, например "1"; при отсутствии тепловой помехи в обнаружителе помехи 11 вырабатывается сигнал другого уровня, например "0". В момент появления тепловой помехи в поле второго строба определение координат ракеты ведется с модели ракеты 9. В момент выхода тепловой помехи за пределы второго строба и соответствующем изменении яркости точек поля второго строба, на выходе обнаружителя помехи 11 восстанавливается первоначальный нулевой сигнал. Датчик координат ракеты 10 через контакты первого коммутатора 12 [5, стр. 114-117] может быть подключен к выходу системы слежения второго строба 8, либо к выходу модели ракеты 9. Вход системы слежения второго строба 8 через контакты второго коммутатора 13 [5, стр. 114-117] может быть подключен либо к датчику координат ракеты 10, либо к выходу пеленгатора 1.
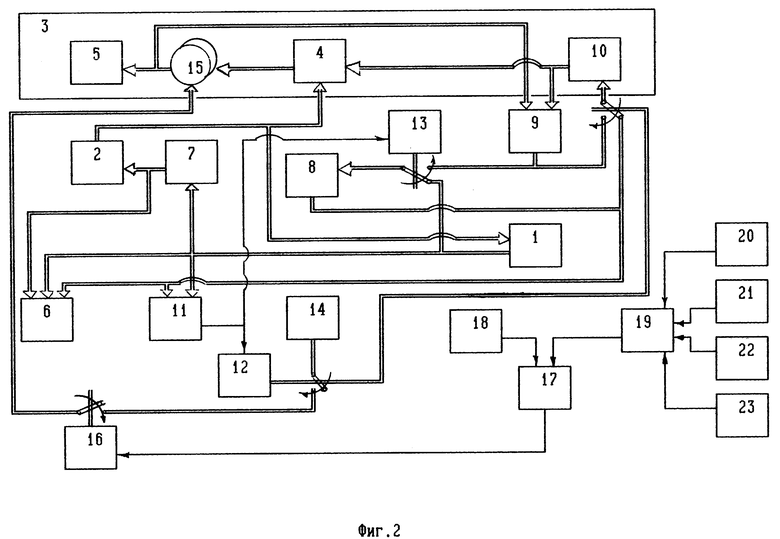
Для реализации первого дополнительного способа в систему управления ракетой (фиг. 1), содержащую оптико-электронный пеленгатор с приводами наведения в горизонтальной и вертикальной плоскостях, электронную систему сопровождения цели, выход которой подключен к приводам наведения, электронную систему сопровождения ракеты, включающую датчик координат ракеты, блок выработки команд управления и передатчик команд на управляемую ракету, причем выход датчика координат ракеты соединен с первым входом блока выработки команд, а второй вход блока выработки команд подключен к выходу электронной системы сопровождения цели, монитор для изображения цели, ракеты, первого и второго стробов, систему слежения первого строба за изображением цели, выход которой по координатам первого строба подключен к монитору и ко входу электронной системы сопровождения цели, систему слежения второго строба, модель ракеты, первый вход которой подключен к датчику вертикальных и горизонтальных координат ракеты, обнаружитель помехи, первый коммутатор, второй коммутатор, введены измерители расстояний до ракеты и цели, измерители радиальных скоростей цели и ракеты, компаратор, задатчик дополнительного сигнала, первый сумматор для команд управления в вертикальной плоскости и второй сумматор для команд управления в горизонтальной плоскости, аппаратура оценки подлетного времени, четыре входа которой подключены к измерителям расстояния и радиальных скоростей цели и ракеты, первый вход компаратора подключен к аппаратуре оценки подлетного времени, второй вход к задатчику допустимого времени маневра, а выход - к управляющему входу третьего коммутатора, входы датчика координат ракеты через нормально замкнутые контакты первого коммутатора подключены к выходу системы слежения второго строба и через нормально разомкнутые контакты первого коммутатора к выходу модели ракеты, а управляющий вход первого коммутатора подключен к обнаружителю тепловой помехи в поле второго строба, вход системы слежения второго строба через нормально замкнутые контакты второго коммутатора подключен к выходу пеленгатора, а через нормально разомкнутые контакты - к выходу модели ракеты, первый и второй сумматоры сигналов для вертикального и горизонтального каналов команд соответственно установлены на входе передатчика команд, первый вход каждого сумматора подключен к блоку выработки команд управления, а второй вход через нормально разомкнутые контакты первого коммутатора и нормально разомкнутые контакты третьего коммутаторам к выходу задатчика дополнительного сигнала.
На фиг. 2 представлена блок-схема системы управления ракетой по первому дополнительному способу.
Система управления ракетой включает в себя оптико-электронный пеленгатор с приводами наведения 1, электронную систему сопровождения цели 2, выход которой подключен к приводам наведения, электронную систему сопровождения ракеты 3, содержащую последовательно подключенные блок выработки команд 4 и передатчик команд 5, второй вход блока выработки команд 4 подключен к выходу системы сопровождения цели 2, монитор 6 для изображения цели, ракеты первого и второго стробов, систему 7 слежения первого строба за изображением цели, выход которой по координатам первого строба подключен к монитору 6 и ко входу электронной системы сопровождения цели 2, систему слежения второго строба 8, модель ракеты 9, датчик координат ракеты 10, обнаружитель помехи 11, выход которого подключен ко входу первого коммутатора 12 и ко входу второго коммутатора 13, задатчик дополнительного сигнала 14, первый и второй сумматоры 15, на первый вход каждого из которых подается сигнал с выхода блока выработки команд управления 4, на второй вход через нормально разомкнутые контакты первого коммутатора 12 и нормально разомкнутые контакты третьего коммутатора 16 подается сигнал с задатчика дополнительного сигнала 14 соответственно для первого сумматора сигналы управления в вертикальном канале и для второго сумматора сигналы управления в горизонтальном канале. Кроме того, система управления включает в себя компаратор 17, задатчик допустимого времени маневра 18, аппаратуру оценки подлетного времени 19, измеритель расстояний до ракеты 20, измеритель расстояний до цели 21, измеритель радиальных скоростей ракеты 22, измеритель радиальных скоростей цели 23.
Оптико-электронный пеленгатор 1, преобразует излучения от цели и ракеты в электрические сигналы, поступающие в систему сопровождения цели 2, систему сопровождения ракеты 3, монитор 6. Выход системы сопровождения цели 2 подключен ко входу системы слежения первого строба 7, выход последней подключен ко входу монитора 6. Система слежения первого строба 7 позволяет по контрасту теплового или телевизионного изображения определить координаты цели относительно оптической оси тепловизора. Система слежения второго строба 8 позволяет определить координаты ракеты относительно оптической оси тепловизора. Управление приводами осуществляется таким образом, чтобы вывести изображение цели в центр экрана. По координатам первого строба привода автоматически разворачивают пеленгатор вслед за целью. По координатам второго строба определяются текущие координаты ракеты, которые из системы слежения второго строба 8 поступают в датчик координат ракеты 10 и используются для выработки команд управления ракетой. Одновременно с сопровождением цели и ракеты системой наведения осуществляется моделирование полета с использованием модели ракеты 9. По координатам цели и ракеты блок выработки команд 4 вырабатывает команды управления, они суммируются с дополнительными сигналами и затем передаются на ракету и на второй вход модели ракеты 9. При появлении тепловой помехи в поле второго строба в обнаружителе помехи 11 [4, стр. 128-130] , вход которого подключен к пеленгатору 1, вырабатывается сигнал определенного уровня, например "1"; при отсутствии тепловой помехи в обнаружителе помехи 11 вырабатывается сигнал другого уровня, например "0". В момент появления тепловой помехи в поле второго строба при подлетном времени ракеты к цели, превышающем 1-2 секунды, определение координат ракеты ведется с модели ракеты 9, а в команды управления добавляют дополнительные сигналы из задатчика дополнительного сигнала 14, уводящие ракету в сторону от тепловой помехи. В момент выхода тепловой помехи за пределы второго строба, на выходе обнаружителя помехи 11 восстанавливается первоначальный нулевой сигнал. Датчик координат ракеты через контакты первого коммутатора 12 [5, стр. 114-117] может быть подключен либо к выходу системы слежения второго строба 8, либо к выходу модели ракеты 9. Обнаружитель помехи 11 постоянно осуществляет анализ яркости точек поля второго строба и фиксирует момент появления помехи в поле второго строба выработкой соответствующего сигнала. При выходе тепловой помехи из поля второго строба и соответствующем изменении яркости точек поля второго строба восстанавливается первоначальный выходной сигнал.
В системе управления ведется оценка подлетного времени. В измерителе 20 определяется расстояние до ракеты [6, стр. 23-33, 177-188], в измерителе 21 - расстояние до цели [6, стр. 22-33, 177-188]. Устройство 22 измеряет радиальную скорость ракеты [7, стр. 44-60], устройство 23 - радиальную скорость цели [7, стр. 44-60]. По этим четырем величинам в устройстве 19 вычисляется подлетное время до встречи ракеты с целью. При значении подлетного времени, превышающем заданную величину, компаратором 17 (например, микросхема К521СА3) вырабатывается сигнал, подключающий выход задатчика дополнительного сигнала 14 ко второму входу сумматора 15 [5, стр. 24]. Задатчик дополнительного сигнала 14 выполняется в виде источника питания определенного уровня (один источник для вертикального канала, второй источник для горизонтального канала управления ракетой). Задатчик допустимого времени маневра 18 выполняется в виде источника опорного напряжения.
Аппаратура оценки подлетного времени реализует [5, стр. 52-83] следующую зависимость между значениями измеряемых величин:
где Tпод - подлетное время;
Dц - дальность до цели;
Dр - дальность до ракеты;
Vр - скорость ракеты;
Vц - скорость цели.
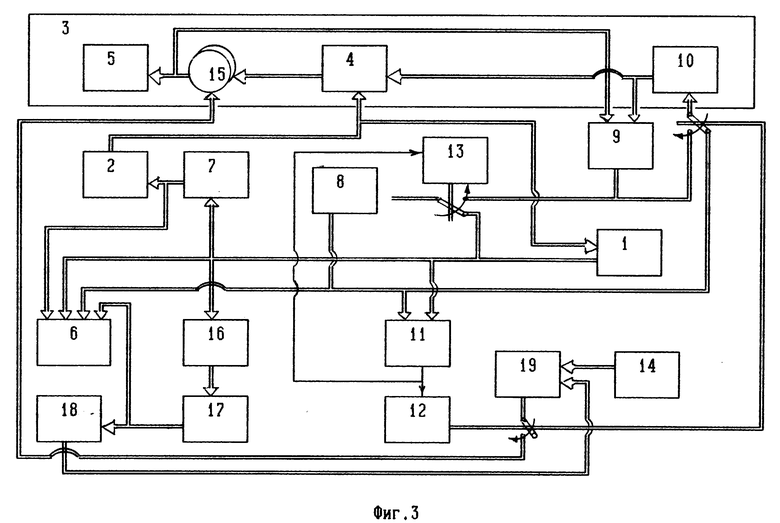
Для реализации второго дополнительного способа в систему управления ракетой, содержащую оптико-электронный пеленгатор с приводами наведения в горизонтальной и вертикальной плоскостях, электронную систему сопровождения цели, выход которой подключен к приводам наведения, электронную систему сопровождения ракеты, включающую датчик координат ракеты, блок выработки команд управления и передатчик команд на управляемую ракету, причем выход датчика координат ракеты соединен с первым входом блока выработки команд, а второй вход блока выработки команд подключен к выходу электронной системы сопровождения цели, монитор для изображения цели, ракеты, первого и второго стробов, систему слежения первого строба за изображением цели, выход которой по координатам первого строба подключен к монитору и ко входу электронной системы сопровождения цели, систему слежения второго строба, модель ракеты, первый вход которой подключен к датчику вертикальных и горизонтальных координат ракеты, обнаружитель помехи, первый коммутатор, второй коммутатор, введены система слежения третьим стробом, задатчик дополнительного сигнала, блок вычисления скоростей, блок произведений, первый сумматор для команд управления в вертикальной плоскости и второй сумматор для команд управления в горизонтальной плоскости, первый вход каждого сумматора подключен к блоку выработки команд управления, а второй вход через нормально разомкнутые контакты первого коммутатора к выходу задатчика дополнительного сигнала, вход системы слежения второго строба через нормально замкнутые контакты второго коммутатора подключен к выходу пеленгатора, а через нормально разомкнутые контакты - к выходу модели ракеты, первый и второй сумматоры сигналов для вертикального и горизонтального каналов команд соответственно установлены на входе передатчика команд.
На фиг. 3 представлена блок-схема системы управления ракетой по второму дополнительному способу.
Система управления ракетой включает в себя оптико-электронный пеленгатор с приводами наведения 1, электронную систему сопровождения цели 2, выход которой подключен к приводам наведения, электронную систему сопровождения ракеты 3, содержащую последовательно подключенные блок выработки команд 4 и передатчик команд 5, второй вход блока выработки команд 4 подключен к выходу системы сопровождения цели 2, монитор 6 для изображения цели, ракеты, первого и второго стробов, систему 7 слежения первого строба за изображением цели, выход которой по координатам первого строба подключен к монитору 6 и ко входу электронной системы сопровождения цели 2, систему слежения второго строба 8, модель ракеты 9, датчик координат ракеты 10, обнаружитель помехи 11, выход которого подключен ко входу первого коммутатора 12 и ко входу второго коммутатора 13, задатчик дополнительного сигнала 14, первый и второй сумматоры 15, на первый вход каждого из которых подается сигнал с выхода блока выработки команд управления 4, на второй вход через нормально разомкнутые контакты первого коммутатора 12 подается сигнал с задатчика дополнительного сигнала 14 соответственно для первого сумматора сигналы управления в вертикальном канале и для второго сумматора сигналы управления в горизонтальном канале. Кроме того, система управления включает в себя систему слежения третьего строба 16, систему сопровождения помехи 17, вычислитель скоростей 18 и блок произведения 19.
Оптико-электронный пеленгатор 1, преобразует излучения от цели и ракеты в электрические сигналы, поступающие в систему сопровождения цели 2, систему сопровождения ракеты 3, монитор 6. Выход системы сопровождения цели 2 подключен ко входу системы слежения первого строба 7, выход последней подключен ко входу монитора 6. Система слежения первого строба 7 позволяет по контрасту теплового или телевизионного изображения определить координаты цели относительно оптической оси тепловизора. Система слежения второго строба 8 позволяет определить координаты ракеты относительно оптической оси тепловизора. Управление приводами осуществляется таким образом, чтобы вывести изображение цели в центр экрана. По координатам первого строба привода автоматически разворачивают пеленгатор вслед за целью. По координатам второго строба определяются текущие координаты ракеты, которые из системы слежения второго строба 8 поступают в датчик координат ракеты 10 и используются для выработки команд управления ракетой. Одновременно сопровождением цели и ракеты системой наведения осуществляется моделирование полета с использованием модели ракеты 9. По координатам цели и ракеты блок выработки команд 4 вырабатывает команды управления, которые в первом и втором сумматорах 15 [5, стр. 24] суммируются с дополнительными сигналами и затем передаются на ракету и на второй вход модели ракеты 9. При появлении тепловой помехи в поле второго строба в обнаружителе помехи 11 [4, стр. 128-130], вход которого подключен к пеленгатору 1, вырабатывается сигнал определенного уровня, например "1"; при отсутствии тепловой помехи в обнаружителе помехи 11 вырабатывается сигнал другого уровня, например "0". В момент появления тепловой помехи в поле второго строба определение координат ракеты ведется с модели ракеты 9, а сопровождение помехи ведут третьим стробом. Датчик координат ракеты 10 через контакты первого коммутатора 12 [5, стр. 114-117] может быть подключен либо к выходу системы слежения второго строба 8, либо к выходу модели ракеты 9. Обнаружитель помехи 11 постоянно осуществляет анализ яркости точек поля второго строба и фиксирует момент появления помехи в поле второго строба выработкой соответствующего сигнала. При выходе тепловой помехи из поля второго строба и соответствующем изменении яркости точек поля второго строба восстанавливается первоначальный выходной сигнал.
Задатчик дополнительного сигнала 14 выполняется в виде источника питания определенного уровня. Система слежения третьего строба 16 выполняется аналогично системе слежения второго строба 8. Система сопровождения помехи 17 выполняется аналогично системе сопровождения цели 2. Блок произведений 19 выполняется на операционных усилителях [5, стр. 52-83], реализующих следующую зависимость:
 ,
,
где - сигналы, поступающие с выхода задатчика дополнительного сигнала 14 на вход блока произведений 19;
- сигналы, поступающие с выхода задатчика дополнительного сигнала 14 на вход блока произведений 19; - скорости цели в вертикальной и горизонтальной проекции, поступающие с выхода вычислителя скоростей 18 на вход блока произведений 19;
- скорости цели в вертикальной и горизонтальной проекции, поступающие с выхода вычислителя скоростей 18 на вход блока произведений 19; - дополнительные сигналы в команды управления ракетой, поступающие с выхода блока произведений 19 на вход сумматора 15.
- дополнительные сигналы в команды управления ракетой, поступающие с выхода блока произведений 19 на вход сумматора 15.
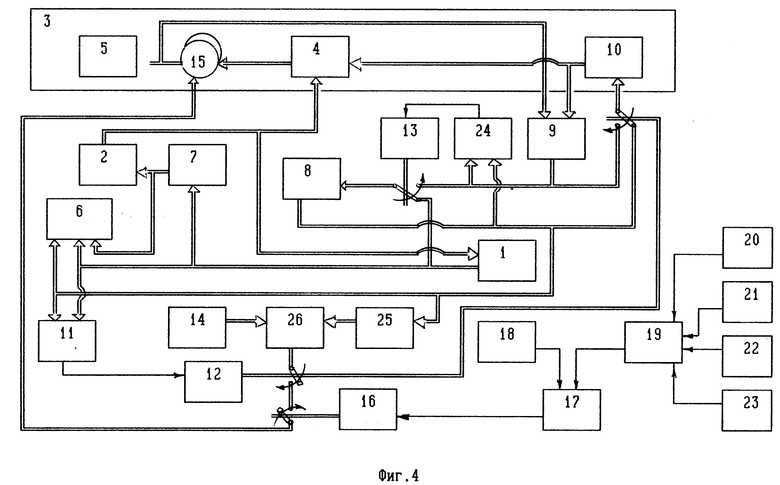
Для реализации третьего дополнительного способа в систему управления ракетой, содержащую оптико-электронный пеленгатор с приводами наведения в горизонтальной и вертикальной плоскостях, электронную систему сопровождения цели, выход которой подключен к приводам наведения, электронную систему сопровождения ракеты, включающую датчик координат ракеты, блок выработки команд управления и передатчик команд на управляемую ракету, причем выход датчика координат ракеты соединен с первым входом блока выработки команд, а второй вход блока выработки команд подключен к выходу электронной системы сопровождения цели, монитор для изображения цели, ракеты, первого и второго стробов, систему слежения первого строба за изображением цели, выход которой по координатам первого строба подключен к монитору и ко входу электронной системы сопровождения цели, систему слежения второго строба, модель ракеты, первый вход которой подключен к датчику вертикальных и горизонтальных координат ракеты, измерители расстояний до ракеты и цели и радиальных скоростей цели и ракеты, обнаружитель помехи, компаратор, первый коммутатор, второй коммутатор, задатчик дополнительных сигналов, первый сумматор для команд управления в вертикальной плоскости и второй сумматор для команд управления в горизонтальной плоскости, аппаратура оценки подлетного времени, четыре входа которой подключены к измерителям расстояний и радиальных скоростей цели и ракеты, первый вход компаратора подключен к аппаратуре оценки подлетного времени, второй вход к задатчику допустимого времени маневра, а выход - к управляющему входу второго коммутатора, входы датчика координат ракеты через нормально замкнутые контакты первого коммутатора подключены к выходу системы слежения второго строба и через нормально разомкнутые контакты первого коммутатора к выходу модели ракеты, а управляющий вход первого коммутатора подключен к обнаружителю тепловой помехи в поле второго строба, введены вычислитель скоростей, блок произведений, первый вход которого подключен к задатчику дополнительных сигналов, а второй вход через вычислитель скоростей - к выходу системы слежения второго строба, блок сравнений, первый вход которого подключен к выходу модели ракеты, второй вход - к выходу системы слежения второго строба, а выход - к управляющему входу второго коммутатора. Вход системы слежения второго строба через нормально замкнутые контакты второго коммутатора подключен к выходу пеленгатора, а через нормально разомкнутые контакты - к выходу модели ракеты, первый и второй сумматоры сигналов для вертикального и горизонтального каналов команд соответственно установлены на входе передатчика команд, первый вход каждого сумматора подключен к блоку выработки команд управления, а второй вход через нормально разомкнутые контакты первого коммутатора и нормально разомкнутые контакты третьего коммутатора к выходу блока произведений по соответствующему сигналу.
На фиг. 4 представлена блок-схема системы управления ракетой по третьему дополнительному способу.
Система управления ракетой включает в себя оптико-электронный пеленгатор с приводами наведения 1, электронную систему сопровождения цели 1, выход которой подключен к приводам наведения, электронную систему сопровождения ракеты 3, содержащую последовательно подключенные блок выработки команд 4 и передатчик команд 5, второй вход блока выработки команд 4 подключен к выходу системы сопровождения цели 2, монитор 6 для изображения цели, ракеты, первого и второго стробов, систему 7 слежения первого строба за изображением цели, выход которой по координатам первого строба подключен к монитору 6 и ко входу электронной системы сопровождения цели 2, систему слежения второго строба 8, модель ракеты 9, датчик координат ракеты 10, обнаружитель помехи 11, выход которого подключен ко входу первого коммутатора 12 и ко входу второго коммутатора 13, задатчик дополнительного сигнала 14, первый и второй сумматоры 15, третий коммутатор 16, компаратор 17, задатчик допустимого времени маневра 18, аппаратуру оценки подлетного времени 19, измеритель расстояний до ракеты 20, измеритель расстояний до цели 21, измеритель радиальных скоростей цели 22, измеритель радиальных скоростей ракеты 23, блок сравнений 24, вычислитель скоростей 25, блок произведений 26, первый вход которого подключен к выходу задатчика дополнительных сигналов 14, а второй вход - к выходу вычислителя скоростей 25. На первый из сумматоров 15 подается сигнал с выхода блока выработки команд управления 4, на второй вход через нормально разомкнутые контакты первого коммутатора 12 и нормально разомкнутые контакты третьего коммутатора 16 подается сигнал с блока произведений 26. Сигнал с выхода сумматора 15 поступает на вход передатчика команд управления 5 и на второй вход модели ракеты 9.
Оптико-электронный пеленгатор 1, обработав информацию о движении цели и ракеты, передает в системы сопровождения цели 2 и ракеты 3. Выход системы сопровождения цели 2 подключен ко входу системы слежения первого строба 7, выход последней подключен ко входу монитора 7. Система слежения первого строба 7 позволяет контрасту теплового или телевизионного изображения определить координаты цели относительно оптической оси тепловизора. Система слежения второго строба 8 позволяет определить координаты ракеты относительно оптической оси тепловизора. Управление приводами осуществляется таким образом, чтобы вывести изображение цели в центр экрана. По координатам первого строба привода автоматически разворачивают пеленгатор 1 вслед за целью. По координатам второго строба определяются текущие координаты ракеты, которые из системы слежения второго строба 8 поступают в датчик координат ракеты 10 и используются для выработки команд управления ракетой. Одновременно с сопровождением цели и ракеты системой наведения осуществляется моделирование полета с использованием модели ракеты 9. По координатам цели и ракеты блок выработки команд 4 вырабатывает команды управления, которые в первом и втором сумматорах 15 [5, стр. 24] суммируются с дополнительными сигналами и затем передаются на ракету и на второй вход модели ракеты 9. При появлении тепловой помехи в поле второго строба в обнаружителе помехи 11 [4, стр. 128-130] , выход которого подключен к пеленгатору 1, вырабатывается сигнал определенного уровня, например "1"; при отсутствии тепловой помехи в обнаружителе помехи вырабатывается сигнал другого уровня, например "0". В момент появления тепловой помехи в поле второго строба при подлетном времени ракеты к цели, превышающем 1-2 с, определение координат ракеты ведется с модели ракеты 9, а в команды управления добавляют дополнительные сигналы из задатчика дополнительного сигнала 14, уводящие ракету в сторону от тепловой помехи. В момент выхода тепловой помехи за пределы второго строба, на выходе обнаружителя помехи 11 восстанавливается первоначальный нулевой сигнал. Датчик координат ракеты через контакты коммутатора 12 [5, стр. 114-117] может быть подключен либо к выходу системы слежения второго строба 8, либо к выходу модели ракеты 9. Обнаружитель помехи 11 постоянно осуществляет анализ яркости точек поля второго строба и фиксирует момент появления помехи в поле второго строба выработкой соответствующего сигнала. При выходе тепловой помехи из поля второго строба и соответствующем изменении яркости точек поля второго строба восстанавливается первоначальный выходной сигнал.
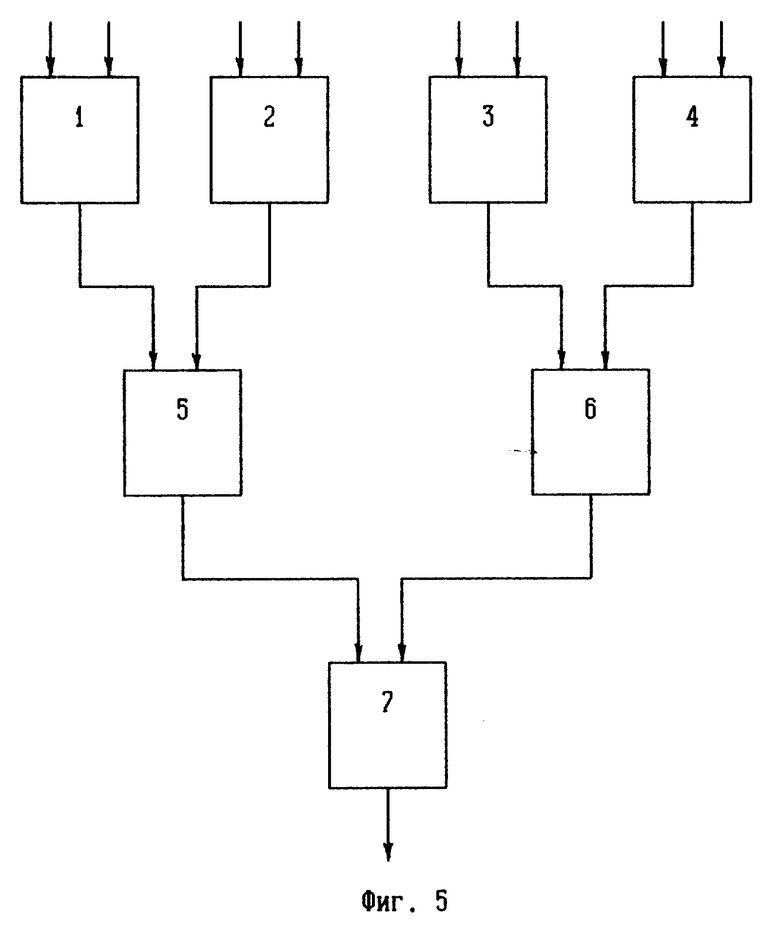
На фиг. 5 представлена логическая схема блока сравнений.
Блок сравнений 24 включает в себя компараторы 1, 2, 3 и 4, устройства 5, 6 и 7, отрабатывающие логическую операцию "И". На первый вход компаратора 1 (например, микросхема К521СА3) подается вертикальная координата X модели ракеты, на второй вход - координата X верхней границы второго строба. На первый вход компаратора 2 (например, микросхема К521СА3) подается вертикальная координата X модели ракеты, на второй вход - координата X нижней границы второго строба. На первый вход компаратора 3 (например, микросхема К521СА3) подается горизонтальная координата Y модели ракеты, на второй вход - координата Y правой границы второго строба. На первый вход компаратора 4 (например микросхема К521СА3) подается горизонтальная координата Y модели ракеты, на второй вход - координата Y левой границы второго строба. На выходе компараторов 1 и 3 будет единичный сигнал в том случае, когда значения сигналов подаваемых на первый вход будут меньше значений сигналов подаваемых на второй вход. На выходе компараторов 2 и 4 будет единичный сигнал в том случае, когда значения сигналов подаваемых на первый вход будут больше значений сигналов подаваемых на второй вход. На выходе устройства 7 [5, стр. 123], отрабатывающего логическую операцию "И", будет единичный сигнал в том случае, когда единичный сигнал будет на выходе компараторов 1, 2, 3 и 4. Выход блока сравнений 24 подключен ко входу коммуратора 13.
В системе управления ведется оценка подлетного времени. В измерителе 20 определяется расстояние до ракеты [6, стр. 23-33, 177-188], в измерителе 21 - расстояние до цели [6, стр. 23-33, 177-188]. Устройство 22 измеряет радиальную скорость ракеты [7, стр. 44-60], устройство 23 - радиальную скорость цели [7, стр. 44-60]. По этим четырем величинам в устройстве 19 вычисляется подлетное время до встречи ракеты с целью. При значении подлетного времени, превышающем заданную величину, компаратором 17 (например, микросхема К521СА3) вырабатывается сигнал, подключающий выход задатчика дополнительного сигнала 14 ко второму входу сумматора 15 [5, стр. 114-117].
Задатчик дополнительного сигнала 14 выполняется в виде источника питания определенного уровня. Задатчик допустимого времени маневра 18 выполняется в виде источника опорного напряжения.
Аппаратура оценки подлетного времени 19 реализует [5, стр. 52-83] следующую зависимость между значениями измеряемых величин: ,
,
где
Tпод - полетное время;
Dц - дальность до цели;
Dр - дальность до ракеты;
Vр - скорость ракеты;
Vц - скорость цели.
Блок произведений 26 выполняется на операционных усилителях [5, стр. 52-83], реализующих следующую зависимость: ,
,
где - сигналы, поступающие с выхода задатчика дополнительного сигнала 14 на вход блока произведений 19;
- сигналы, поступающие с выхода задатчика дополнительного сигнала 14 на вход блока произведений 19; - скорости цели в вертикальной и горизонтальной проекции, поступающие с выхода вычислителя скоростей 18 на вход блока произведений 19;
- скорости цели в вертикальной и горизонтальной проекции, поступающие с выхода вычислителя скоростей 18 на вход блока произведений 19; - дополнительные сигналы в команды управления ракетой, поступающие с выхода блока произведений 19 на вход сумматора 15.
- дополнительные сигналы в команды управления ракетой, поступающие с выхода блока произведений 19 на вход сумматора 15.
Использование описанных способов и систем управления позволяет повысить вероятность поражения цели в условиях действия помех. У каждого из предложенных способов есть свои преимущества в управлении ракетами по сравнению с другими способами и, соответственно, свои области преимущественного использования.
Источники информации.
1. Демидов В. П. , Кутыев Н.Ш., "Управление зенитными ракетами". М.: "Военное издательство". - 1989.
2. Прэтт У. К. "Цифровая обработка изображений". (том 2) М.: "Мир" - 1982.
3. Патент США N 3567163, кл. F 41 G 7/00.
4. Катыс Г.П. "Восприятие и анализ оптической информации автоматической системой". М.: "Машиностроение" - 1986.
5. Тетельбаум И. М. , Шнейдер Ю.Р. "400 схем для АВМ" М.: "Энергия" - 1978.
6. Первачев С.В. "Радиоавтоматика" М.: "Радиосвязь" - 1982.
7. Васин В.В., Степанов Б.М. "Справочник-задатчик по радиолокации" М.: "Советское радио" - 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
Изобретение относится к управлению и регулированию, а более конкретно - к управляемому вооружению. Сущность изобретения заключается в том, что при управлении ракетой постоянно производят распознавание присутствия в полое второго строба пеленгатора тепловой помехи, а с момента появления тепловой помехи в поле второго строба до ее выхода из поля второго строба пеленгатора определение координат ракеты осуществляют по координатам, получаемым с модели ракеты, определяют скорость перемещения помехи по полю пеленгатора и в сигналы команд управления добавляют дополнительные сигналы, уводящие ракету в сторону, противоположную движению тепловой помехи по полю пеленгатора, а после установления отличий значений координат ракеты от координат поля второго строба управление вторым стробом передают в исходный режим управления по координатам модели ракеты с последующим определением координат ракеты по второму стробу пеленгатора. Для реализации описанного способа в систему управления ракетой дополнительно введены обнаружитель помехи, первый коммутатор, второй коммутатор, управляющий вход которого подключен к обнаружителю тепловой помехи в поле второго строба, второй вход модели ракеты подключен к входу передатчика команд, вход системы слежения второго строба через нормально замкнутые контакты второго коммутатора подключен к выходу пеленгатора, а через нормально разомкнутые контакты - к выходу модели ракеты, входы датчика координат ракеты через нормально замкнутые контакты первого коммутатора подключены к выходу системы слежения второго строба и через нормально разомкнутые контакты первого коммутатора к выходу модели ракеты. Изобретение позволяет повысить надежность и эффективность комплекса при действии тепловых помех. 2 с. и 6 з.п.ф-лы, 5 ил.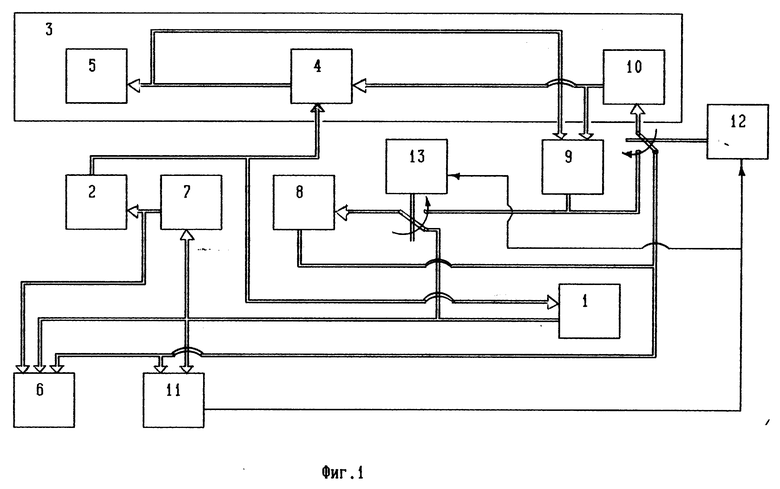
| US, патент, 3567163, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
