Изобретение относится к системам автоматического управления и может быть использовано в образцах техники, работающих в условиях воздействия помех и пропадания информационных сигналов, а также в установках для научных исследований.
Известен способ управления движущимся объектом [1], заключающийся в том, что выделяют координаты объекта, определяют величину ошибки, пропорциональную разности между входной координатой и координатой объекта, формируют команды управления объектом в соответствии с величиной ошибки.
Система управления для осуществления указанного способа содержит последовательно соединенные приемные устройства входного сигнала и выходного сигнала, устройство выработки команд управления, устройство телеуправления, систему управления нормальными перегрузками. Недостатком указанных технических решений является низкая точность работы системы управления в условиях воздействия помех и пропадания информационных сигналов.
Наиболее близким к заявляемым техническим решениям является способ управления движущимся объектом [2], заключающийся в том, что осуществляют запуск и разгон с помощью двигателя объекта управления (ракету), определяют текущие координаты факела двигателя движущегося объекта, осуществляют сопровождение факела двигателя широким полем управления, формируют по координатам факела двигателя команды управления объектом и полями управления, осуществляют переход с широкого поля управления на узкое поле управления после отделения двигателя, осуществляют наведение объекта на пассивном участке полета в узком поле управления в соответствии с координатами источника излучения на объекте. После отделения двигателя осуществляется переход в формировании команд управления от координат двигателя в широком поле управления к координатам от источника излучения в узком поле управления. После отделения двигателя возможно слежение широким полем управления за факелом двигателя, что влечет к неправильному формированию команд управления объектом по координатам отделившегося двигателя и к уводу узкого поля управления от ракеты, а следовательно, к срыву сопровождения и наведения объекта.
Система управления [3] для осуществления указанного способа содержит последовательно соединенные первое приемное устройство входного сигнала, блок формирования ошибки, блок управления, объект, выход которого соединен со входами второго и третьего приемных устройств, модель объекта, в качестве модели объекта используют динамическую модель объекта, последовательно соединенные устройство переключения, блок вычисления разности, фильтр, блок выработки команд управления моделью объекта, выход которого соединен со входом модели объекта, а выход модели объекта соединен со вторым входом блока вычисления разности и первым входом устройства переключения, второй и третий входы устройства переключения соединены соответственно с выходами второго и третьего приемных устройств, вторые входы которых соединены соответственно с третьим и четвертым выходами устройства переключения, второй выход устройства переключения соединен со вторым входом блока формирования ошибки, а выход блока управления соединен со вторым входом блока выработки команд управления моделью объекта. В этой системе управления предлагается на момент переключения второго и третьего приемных устройств ракеты вводить принудительный режим управления ракетой, то есть управлять ракетой по координатам модели объекта. Так как момент времени переключения приемных устройств точно неизвестен, то принудительный режим обязательно вводится на расчетном интервале времени. Однако в тех случаях, когда нет сопровождения вторым приемным устройством факела отделившегося двигателя введение принудительного режима управления объектом приводит к ухудшению качества наведения объекта.
Недостатком указанных технических решений является низкая надежность работы системы управления при отделении двигателя, так как при отделении двигателя возможно его сопровождение и неточное формирование команд управления объектом.
Задачей предлагаемой группы изобретений является повышение точности и надежности работы системы управления при отделении двигателя. Поставленная задача решается за счет сравнения запомненных прогнозируемых координат объекта управления с измеряемыми координатами объекта управления.
Решение поставленной задачи достигается тем, что в способе управления объектом, включающем формирование поля управления, запуск объекта управления с помощью первого двигателя с отделением его от объекта управления, разгон объекта управления с помощью второго двигателя с последующим его отделением от объекта управления, наведение объекта управления в поле управления в соответствии с измеренными координатами объекта управления, до попадания объекта управления в поле управления формируют с помощью модели объекта управления координаты объекта управления, при попадании объекта управления в поле управления сравнивают измеренные координаты объекта управления с соответствующими текущему времени наведения координатами модели объекта управления, устанавливают пороговые значения величины ошибки между измеренными координатами объекта управления с соответствующими текущему времени наведения координатами модели объекта управления, и если ошибка между измеренными координатами объекта управления и соответствующими текущему времени наведения координатами модели объекта управления больше установленного порогового значения, то наведение объекта управления осуществляют по координатам модели объекта управления, если ошибка между измеренными координатами объекта управления и соответствующими текущему времени наведения координатами модели объекта управления меньше установленного порогового значения, то наведение объекта управления осуществляют по измеренным координатам объекта управления.
Решение поставленной задачи достигается тем, что в способе управления объектом, включающем формирование широкого и узкого полей управления, запуск объекта управления, разгон объекта управления с помощью двигателя с последующим его отделением от объекта управления, наведение объекта управления на разгонном участке в широком поле управления в соответствии с координатами факела двигателя объекта управления, наведение объекта управления на пассивном участке полета в узком поле управления в соответствии с координатами источника излучения на объекте управления, при наведении объекта управления в широком поле управления формируют с помощью модели объекта управления прогнозируемые координаты объекта управления, запоминают прогнозируемые координаты объекта управления, сравнивают текущие координаты объекта управления в широком поле управления с соответствующими текущему времени наведения запомненными прогнозируемыми координатами объекта управления, устанавливают пороговые значения величины ошибки между текущими координатами объекта управления в широком поле управления с соответствующими текущему времени наведения запомненными прогнозируемыми координатами объекта управления, если ошибка между текущими координатами объекта управления в широком поле управления и соответствующими текущему времени наведения запомненными прогнозируемыми координатами объекта управления меньше установленного порогового значения, то наведение объекта управления до появления координат объекта управления в узком поле управления осуществляют по координатам объекта управления в широком поле управления, а если ошибка между текущими координатами объекта управления в широком поле управления и соответствующими текущему времени наведения запомненными прогнозируемыми координатами объекта управления больше установленного порогового значения, то наведение объекта управления до появления координат объекта управления в узком поле управления осуществляют по координатам модели объекта управления.
Для осуществления указанного способа в систему управления объектом, содержащую последовательно соединенные первое приемное устройство, блок формирования ошибок, блок управления объектом, объект управления, второе приемное устройство, второй вход которого соединен с выходом объекта управления, и последовательно соединенные блок выработки команд, первый вход которого соединен с выходом блока управления объектом, модель объекта управления, блок формирования разности, фильтр, введены первый ключ, выход которого соединен с третьим входом второго приемного устройства, второй ключ, выход которого соединен со вторым входом блока выработки команд, переключатель, выход которого соединен со вторым входом блока формирования ошибок, блок формирования переключающих сигналов, первый вход которого соединен с выходом второго приемного устройства и вторым входом блока формирования разности, и последовательно соединенные блок прогнозирования, вход которого соединен с выходом модели объекта управления, линия задержки, выход которой соединен со вторым входом блока формирования переключающих сигналов, входом первого ключа и первым входом переключателя, причем выход блока формирования переключающих сигналов соединен с управляющими входами первого и второго ключей и переключателя, второй вход которого соединен с выходом второго приемного устройства, а выход фильтра соединен со входом второго ключа.
Для осуществления указанного способа в систему управления объектом, содержащую последовательно соединенные первое приемное устройство, блок формирования ошибок, блок управления объектом, объект управления, второе приемное устройство, второй вход которого соединен с выходом объекта управления, и последовательно соединенные блок выработки команд, первый вход которого соединен с выходом блока управления объектом, модель объекта управления, блок формирования разности, фильтр, введены первый ключ, выход которого соединен с третьим входом второго приемного устройства, второй ключ, выход которого соединен со вторым входом блока выработки команд, переключатель, выход которого соединен со вторым входом блока формирования ошибок, блок формирования переключающих сигналов, первый вход которого соединен с выходом второго приемного устройства и вторым входом блока формирования разности, и последовательно соединенные блок прогнозирования, вход которого соединен с выходом модели объекта управления, линия задержки, выход которой соединен со вторым входом блока формирования переключающих сигналов, входом первого ключа и первым входом переключателя, причем выход блока формирования переключающих сигналов соединен с управляющими входами первого и второго ключей и переключателя, второй вход которого соединен с выходом модели объекта управления, а выход фильтра соединен со входом второго ключа.
Для осуществления указанного способа в систему управления объектом, содержащую последовательно соединенные первое приемное устройство и блок формирования ошибок, последовательно соединенные блок управления объектом, объект управления, второе приемное устройство, второй вход которого соединен с выходом объекта управления объектом, и последовательно соединенные блок выработки команд, первый вход которого соединен с выходом блока управления, модель объекта управления, блок формирования разности, первый фильтр, выход которого соединен со вторым входом блока выработки команд, введены ключ, выход которого соединен с третьим входом второго приемного устройства, переключатель, выход которого соединен со вторым входом блока формирования ошибок, блок формирования переключающих сигналов, первый вход которого соединен с выходом второго приемного устройства и вторым входом переключателя, и последовательно соединенные второй фильтр, вход которого соединен с выходом первого приемного устройства, сумматор, второй вход которого соединен с выходом модели объекта управления и входом блока управления объектом, блок прогнозирования, линия задержки, выход которой соединен со вторым входом блока формирования переключающих сигналов, входом ключа и первым входом переключателя, причем выход блока формирования переключающих сигналов соединен с управляющими входами ключа и переключателя.
В заявляемых технических решениях с целью повышения точности и надежности работы системы управления при отделении двигателя обеспечивается определение координат динамической модели объекта в соответствии с реальным движением объекта в условиях отфильтрованных от шумов входных сигналов, оценка величины отклонения запомненной прогнозируемой траектории объекта от измеряемых координат объекта, принятие решения об истинности измеренных координат объекта и формировании соответствующим образом закона управления объектом.
Предлагаемое техническое решение поясняется чертежами, где Фиг.1 изображает первый вариант реализации системы управления, Фиг.2 - второй вариант реализации системы управления, Фиг. 3 - третий вариант реализации системы управления, а Фиг.4 - циклограмму работы устройств.
Первый вариант реализации системы управления объекта поясняет Фиг.1, на которой обозначено: 1 - первое приемное устройство; 2 - блок формирования ошибок; 3 - блок управления; 4 - объект управления; 5 - второе приемное устройство; 6 - блок выработки команд; 7 - модель объекта управления; 8 - блок формирования разности; 9 - фильтр; 10 - блок прогнозирования; 11 - линия задержки; 12, 13 - первый и второй ключи; 14 - переключатель; 15 - блок формирования переключающих сигналов.
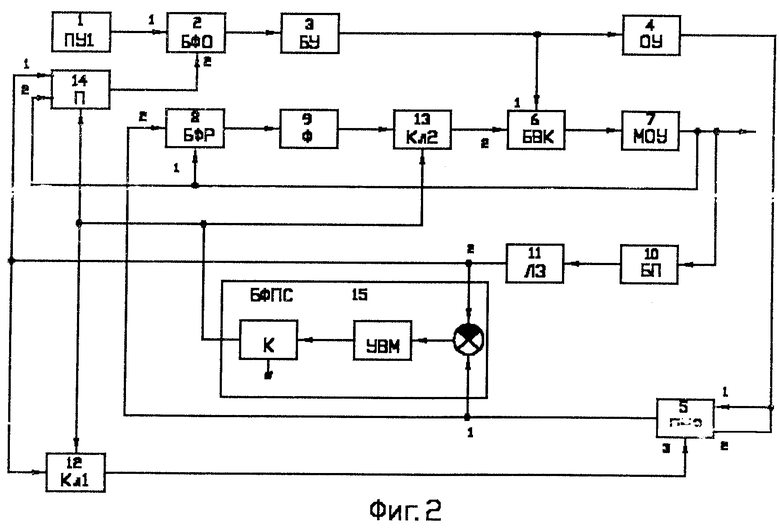
Второй вариант реализации системы управления объекта поясняет Фиг.2, на которой обозначено: 1 - первое приемное устройство; 2 - блок формирования ошибок; 3 - блок управления; 4 - объект управления; 5 - второе приемное устройство; 6 - блок выработки команд; 7 - модель объекта управления; 8 - блок формирования разности; 9 - фильтр; 10 - блок прогнозирования; 11 - линия задержки; 12, 13 - первый и второй ключи; 14 - переключатель; 15 - блок формирования переключающих сигналов.
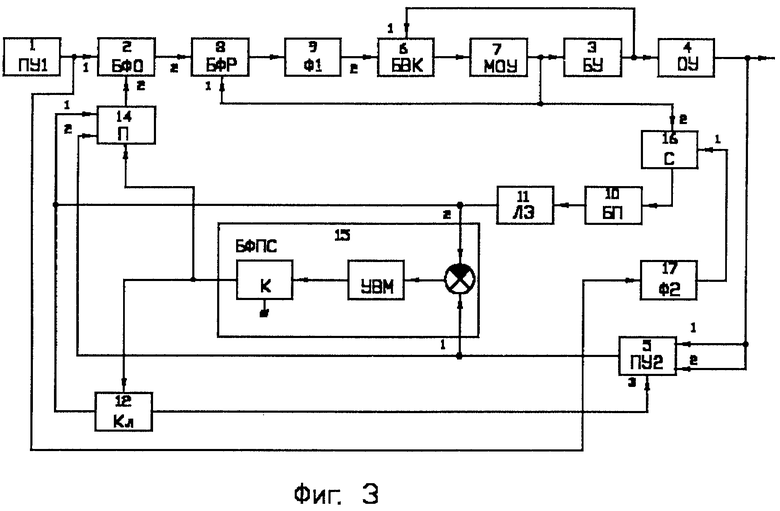
Третий вариант реализации системы управления объекта поясняет Фиг.3, на которой обозначено: 1 - первое приемное устройство; 2 - блок формирования ошибок; 3 - блок управления; 4 - объект управления; 5 - второе приемное устройство; 6 - блок выработки команд; 7 - модель объекта управления; 8 - блок формирования разности; 9, 17 - первый фильтр и второй фильтр; 10 - блок прогнозирования; 11 - линия задержки; 12 - ключ; 14 - переключатель; 15 - блок формирования переключающих сигналов; 16 - сумматор.
Приемные устройства 1, 5 включают пеленгатор, блок управления, исполнительный привод, датчик угла поворота, антенную установку и являются узкопольными пеленгаторами, предназначенными для определения координат объекта слежения и выполнены по известной схеме (см. [4], стр.63...70, рис.2.7... 2.9). Устройство 5 имеет два пеленгатора, один (первый вход устройства 5) с широким полем управления, а другой (второй вход устройства 5) - с узким полем управления.
Устройства 2, 8, 16 и устройство 6 для третьего вариантов реализации системы управления (Фиг.3) представляют собой сумматор аналоговых сигналов с двумя входами (инвертирующим и не инвертирующим), реализованный на базе ОУ 153УД6 (см. [5], стр.75...77, рис.3.2).
Устройства 3, 9 представляют собой корректирующий фильтр, реализованный на базе ОУ 153УД6 (см. [1], стр.366...371, рис.7.15).
Объект управления 4, включающий усилительно-преобразующую аппаратуру, рулевой привод, планер и кинематические соотношения, выполнен по известной схеме (см. [6], стр.388...404, [1] стр.372...379).
Устройство 6 для первого и второго вариантов реализации системы управления (Фиг. 1, 2) представляет собой сумматор аналоговых сигналов с двумя входами, реализованный на базе ОУ 153УД6 (см. [5], стр.75...77, рис.3.1).
Модель объекта управления 7, включающая модель рулевого привода, модель движения летательного аппарата и модель кинематических соотношений, реализована на базе ОУ 153УД6 (см. [7], стр.175...188, рис.4.2).
Блок прогнозирования 10 обеспечивает реализацию на базе аналогового перемножителя (см. [5] , стр. 91. ..100, рис.3.15) и сумматора аналоговых сигналов (см. [5] , стр.75...77, рис.3.1), реализованных на базе ОУ153УД6 следующей функции: Хпр=Хo+Tпр*dXo/dt, где Хo и dXo/dt - оценки координаты и скорости изменения координаты, получаемые на выходе модели объекта управления 7, Тпр - время прогноза. Время прогноза Тпр может быть установлено, исходя из инерционных характеристик объекта 4 и характера воздействия на объект 4 возмущающих факторов и помех.
Линия задержки 11 представляет собой известное устройство (см. [8], стр. 30...32, рис.1.23), реализованное на базе ОУ 153УД6. Величина времени задержки равна Тзад=Тпр.
Ключи 12, 13 представляют собой аналоговый ключ, реализованный на базе операционного усилителя 153УД6 (см. [5], стр.190...193, рис.7.22), на который подается сигнал управления через инвертирующий усилитель, реализованный на базе операционного усилителя 153УД6 (см. [5], стр.57...59, табл.2.1). Ключ 13 нормально замкнутый, а ключ 12 нормально разомкнутый.
Переключатель 14 представляет собой аналоговый коммутатор, реализованный на базе операционного усилителя 153УД6 (см. [5], стр.190...194, рис.7.20, 7.23).
Блок формирования переключающих сигналов 15 представляет собой последовательно соединенные элемент выделения модуля аналогового сигнала, построенный на базе микросхемы 153УД6 по известной схеме (см. [8], стр.43-44, рис. 2.9), компаратор, представляющий собой однопороговую схему сравнения, реализованную на базе операционного усилителя 153УД6 (см. [5], стр.167...172, табл. 7.2), и сумматор аналоговых сигналов с двумя входами (инвертирующим и не инвертирующим), реализованный на базе ОУ 153УД6 (см. [5], стр.75...77, рис.3.2).
Устройство 17 представляет собой сглаживающий фильтр, реализованный на базе ОУ 153УД6 (см. [8], стр.101...124).
Вновь вводимые блоки реализуются на базе элементов, являющихся стандартными и выпускаемыми промышленностью со стандартной точностью.
Первый вариант системы управления, реализующий предлагаемые способы управления, работает следующим образом.
Рассмотрим работу системы управления. На выходе первого приемного устройства 1 формируется сигнал, пропорциональный изменению входного сигнала Fвх(t). Этот сигнал поступает на первый вход блока формирования ошибки 2, на второй вход которого поступает сигнал с выхода переключателя 14. На выходе блока формирования ошибки 2 вырабатывается сигнал, пропорциональный величине отклонения выходной координаты объекта Fвых(t) от входного сигнала Fвx(t): ΔF(t)= Fвx(t)-Fвых(t). Сигнал с выхода блока формирования ошибки 2 преобразуется блоком управления 3 и блоком выработки команд 6 и поступает на вход модели объекта 7. На выходе модели объекта 7 получается динамическая оценка координат объекта Foвых(t). Этот сигнал подается на первый вход блока формирования разности 8, на второй вход которого подается сигнал с выхода второго приемного устройства 5, и через блок прогнозирования 10 и линию задержки 11 на первый вход переключателя 14, второй вход блока формирования переключающих сигналов 15, на вход первого ключа 12, выход которого соединен с третьим входом второго приемного устройства 5. Сигнал с выхода блока формирования разности 8 преобразуется фильтром 9 и поступает через второй ключ 13 на второй вход блока выработки команд 6. На выходе второго приемного устройства 5, на первый и второй вход которого подается сигнал с выхода объекта управления 4, вычисляется сигнал, пропорциональный координатам объекта управления 4, и подается на второй вход переключателя 14 и на первый вход блока формирования переключающих сигналов 15, выход которого соединен с управляющими входами первого и второго ключей 12 и 13 и переключателя 14. Преобразованный таким образом сигнал ошибки ΔF(t) в сигнал управления U(t) с выхода блока управления 3 воздействует на объект управления 4. Направление на объект 4 Fвых(t) смещается в пространстве, и исходное угловое рассогласование ΔF(t) между направлением на объект слежения Fвx(t) и на объект 4 Fвых(t) уменьшается.
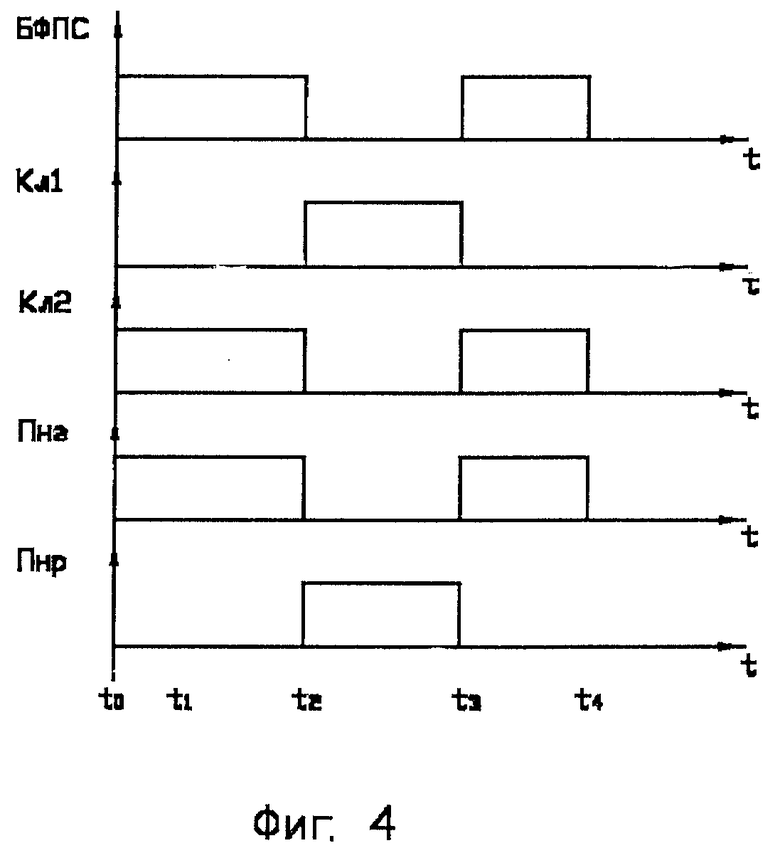
Циклограмма работы ключей 12, 13, переключателя 14 и блока формирования переключающих сигналов 15 приведена на Фиг. 4. Здесь "1" - ключи 12, 13 замкнуты, контакты переключателя 14 замкнуты, на выходе блока формирования переключающих сигналов (компаратор в режиме превышения опорного сигнала) логическая 1; "0" - ключи 12, 13 разомкнуты, контакты переключателя 14 разомкнуты, на выходе блока формирования переключающих сигналов (компаратор сработал) логический 0; "П14 нз" - нормально замкнутые контакты переключателя 14 между его вторым входом и выходом; "П14 нр" - нормально разомкнутые контакты переключателя 14 между его первым входом и выходом.
В интервалах времени t0...t2 и t3...t4 компаратор блока формирования переключающих сигналов 15 находится в режиме превышения опорного сигнала:
U - Uоп > Ue, (1)
где U - входной сигнал с выхода устройства выделения модуля блока формирования переключающих сигналов 15; Uоп - опорный сигнал, определяющий допустимую величину отличия реальной и запомненной прогнозируемой координат объекта 4; Ue - зона нечувствительности компаратора.
t2, t4 - определяют момент времени срабатывания компаратора блока формирования переключающих сигналов 15 по условию:
U - Uоп < Ue. (2)
В первом варианте реализации системы управления повышение точности и надежности достигается путем:
- формирования на выходе модели объекта 7 сигнала, пропорционального оценкам координат объекта 4, с помощью элементов 6, 8, 9;
- формирования прогнозируемых координат объекта 4 с помощью элемента 10;
- сравнения измеряемых и запомненных прогнозируемых координат объекта 4 и принятия решения об истинности измеряемых координат объекта 4 с помощью элементов 11 и 15;
- коммутации сигнала управления объектом 4 в случае сопровождения устройством 5 отделившегося двигателя с помощью элементов 13, 14;
- коммутации сигнала управления приемным устройством 5 в случае сопровождения устройством 5 отделившегося двигателя с помощью элемента 12;
- определенной последовательности соединения вновь вводимых элементов 10...15 и выполнения определенных параметрических соотношений.
Обосновать работу первого варианта системы управления можно следующим образом.
Момент времени t0 определяет старт объекта 4 и начало работы первого двигателя. До момента времени t1 объект 4 не находится в широком поле управления, т. е. отсутствуют координаты объекта 4. В этом случае компаратор устройства 15 находится в режиме превышения.
Момент времени t1 определяет отделение первого двигателя от объекта 4, появление этого двигателя в широком поле управления приемного устройства 5 и захват на сопровождение двигателя. Однако, так как запомненные прогнозируемые координаты объекта 4 и измеренные координаты двигателя отличаются на величину, большую по модулю Uоп, то компаратор устройства 15 находится в режиме превышения.
В интервале времени t0...t2, так как компаратор устройства 15 находится в режиме превышения, осуществляется управление объектом 4 и приемным устройством 5 в соответствии с координатами модели объекта 7 (см. [4], стр.65... 70, рис.2.8, 2.9). Т.е. приемное устройство 5 находится в режиме подслеживания за координатами модели объекта 7 Foвых(t), а объект 4 управляется по командам, пропорциональным координатам модели объекта 7.
Момент времени t2 характеризует вхождение объекта 4 в широкое поле управления приемного устройства 5 и начало управления объекта 4. В интервале времени t2. . . t3 осуществляется автосопровождение объекта 4 устройством 5 (см. [4] , стр.63...65, рис.2.7). В этом случае формирование команд управления объектом 4 и моделью объекта 7 осуществляется по величине разности между входной координатой и координатой объекта 4, получаемой с выхода приемного устройства 5, ΔF(t)=Fвx(t)-Fвых(t). При этом передаточная функция выходного сигнала Fвых(t) через параметры системы и входное воздействие Fвx(t) имеет вид:
где Wi - передаточные функции (индекс соответствует номеру устройства).
На этом интервале времени обеспечивается динамическая подстройка выходных координат модели объекта 7 под реальные координаты объекта 4.
Передаточная функция на выходе модели объекта 7 через параметры системы управления и входное воздействие Fвx(t) имеет вид:
При выполнении условий:
W7=W4 и W5=1 (5)
выражение (4) примет вид:
Полученная передаточная функция (6) соответствует выражению (3). Следовательно, на выходе модели объекта 7 формируется координата Fo -вых(t), аналогичная выходной координате системы Fвых(t).
Передаточная функция на выходе модели объекта 7 через параметры системы управления и возмущающее воздействие Fп(t) по каналу измерения координат объекта 4 имеет вид:
При выполнении условия:
W9=W3 (8)
передаточная функция (7) обращается в нуль. Следовательно, в этом случае обеспечивается эффективное подавление возмущающих воздействий по каналу измерения координат объекта на выходе модели объекта 7.
Таким образом, в режиме автосопровождения (t2. ..t3) обеспечивается формирование на выходе модели объекта 7 координат Foвых(t), аналогичных выходным координатам объекта 4 Fвых(t) при эффективном подавлении возмущающих воздействий по каналу измерения координат объекта.
Момент времени t3 определяет отделение второго двигателя от объекта 4, нахождение этого двигателя в широком поле управления приемного устройства 5 и захват на сопровождение двигателя в широком поле управления. Однако, так как запомненная прогнозируемая координата объекта 4 и измеренная координата объекта отличаются на величину, большую по модулю Uоп, то компаратор устройства 15 переходит в режим превышения.
В интервале времени t3...t4, так как компаратор устройства 15 находится в режиме превышения, осуществляется управление объектом 4 и приемным устройством 5 в соответствии с координатами модели объекта 7 (см. [4], стр.65... 70, рис. 2.8, 2.9). Т.е. приемное устройство 5 находится в режиме подслеживания за координатами модели объекта 7 Foвых(t), а объект 4 управляется по командам, пропорциональным координатам модели объекта 7.
Момент времени t4 определяет появление источника излучения объекта 4 в узком поле управления приемного устройства 5.
Для времени работы системы управления t>t4 осуществляется автосопровождение источника излучения объекта 4 устройством 5 в узком поле управления (см. [4], стр.63...65, рис.2.7). В этом случае формирование команд управления объектом 4 и моделью объекта 7 осуществляется по величине разности между входной координатой и координатой объекта 4, получаемой с выхода приемного устройства 5, ΔF(t)= Fвx(t)-Fвых(t). Работа системы управления описывается выражениями (3)...(8).
Приведенный анализ показывает, что после отделения первого и второго двигателей даже при захвате их на сопровождение обеспечивается в условиях воздействия возмущающих факторов и помех устойчивое управление объектом 4.
Второй вариант системы управления, реализующий предлагаемые способы управления, работает следующим образом.
Рассмотрим работу системы управления. На выходе первого приемного устройства 1 формируется сигнал, пропорциональный изменению входного сигнала Fвx(t). Этот сигнал поступает на первый вход блока формирования ошибки 2, на второй вход которого поступает сигнал с выхода переключателя 14. На выходе блока формирования ошибки 2 вырабатывается сигнал, пропорциональный величине отклонения выходной координаты объекта Fвых(t) от входного сигнала Fвx(t): ΔF(t)= Fвx(t)-Fвых(t). Сигнал с выхода блока формирования ошибки 2 преобразуется блоком управления 3 и блоком выработки команд 6 и поступает на вход модели объекта 7. На выходе модели объекта 7 получается динамическая оценка координат объекта Foвых(t). Этот сигнал подается на второй вход переключателя 14, на первый вход блока формирования разности 8, на второй вход которого подается сигнал с выхода второго приемного устройства 5, и через блок прогнозирования 10 и линию задержки 11 на первый вход переключателя 14, второй вход блока формирования переключающих сигналов 15, на вход первого ключа 12, выход которого соединен с третьим входом второго приемного устройства 5. Сигнал с выхода блока формирования разности 8 преобразуется фильтром 9 и поступает через второй ключ 13 на второй вход блока выработки команд 6. На выходе второго приемного устройства 5, на первый и второй вход которого подается сигнал с выхода объекта управления 4, вычисляется сигнал, пропорциональный координатам объекта управления 4, и подается на первый вход блока формирования переключающих сигналов 15, выход которого соединен с управляющими входами первого и второго ключей 12 и 13 и переключателя 14. Преобразованный таким образом сигнал ошибки ΔF(t) в сигнал управления U(t) с выхода блока управления 3 воздействует на объект управления 4. Направление на объект 4 Fвых(t) смещается в пространстве, и исходное угловое рассогласование ΔF(t) между направлением на объект слежения Fвx(t) и на объект 4 Fвых(t) уменьшается.
Циклограмма работы ключей 12, 13, переключателя 14 и блока формирования переключающих сигналов 15 приведена на Фиг. 4. Здесь "1" - ключи 12, 13 замкнуты, контакты переключателя 14 замкнуты, на выходе блока формирования переключающих сигналов (компаратор в режиме превышения опорного сигнала) логическая 1; "0" - ключи 12, 13 разомкнуты, контакты переключателя 14 разомкнуты, на выходе блока формирования переключающих сигналов (компаратор сработал) логический 0; "П14 нз" - нормально замкнутые контакты переключателя 14 между его вторым входом и выходом; "П14 нр" - нормально разомкнутые контакты переключателя 14 между его первым входом и выходом.
В интервалах времени t0...t2 и t3...t4 компаратор блока формирования переключающих сигналов 15 находится в режиме превышения опорного сигнала:
U - Uоп > Ue, (9)
где U - входной сигнал с выхода устройства выделения модуля блока формирования переключающих сигналов 15; Uоп - опорный сигнал, определяющий допустимую величину отличия реальной и запомненной прогнозируемой координат объекта 4; Ue - зона нечувствительности компаратора.
t2, t4 - определяют момент времени срабатывания компаратора блока формирования переключающих сигналов 15 по условию:
U - Uоп < Ue. (10)
Во втором варианте реализации системы управления повышение точности и надежности достигается путем:
- формирования на выходе модели объекта 7 сигнала, пропорционального оценкам координат объекта 4, с помощью элементов 6, 8, 9;
- формирования прогнозируемых координат объекта 4 с помощью элемента 10;
- сравнения измеряемых и запомненных прогнозируемых координат объекта 4 и принятия решения об истинности измеряемых координат объекта 4 с помощью элементов 11 и 15;
- коммутации сигнала управления объектом 4 в случае сопровождения устройством 5 отделившегося двигателя с помощью элементов 13, 14;
- коммутации сигнала управления приемным устройством 5 в случае сопровождения устройством 5 отделившегося двигателя с помощью элемента 12:
- определенной последовательности соединения вновь вводимых элементов 10...15 и выполнения определенных параметрических соотношений.
Обосновать работу второго варианта системы управления можно следующим образом.
Момент времени t0 определяет старт объекта 4 и начало работы первого двигателя. До момента времени t1 объект 4 не находится в широком поле управления, т. е. отсутствуют координаты объекта 4. В этом случае компаратор устройства 15 находится в режиме превышения.
Момент времени t1 определяет отделение первого двигателя от объекта 4, появление этого двигателя в широком поле управления приемного устройства 5 и захват на сопровождение двигателя. Однако, так как запомненные прогнозируемые координаты объекта 4 и измеренные координаты двигателя отличаются на величину, большую по модулю Uоп, то компаратор устройства 15 находится в режиме превышения.
В интервале времени t0...t2, так как компаратор устройства 15 находится в режиме превышения, то осуществляется управление объектом 4 и приемным устройством 5 в соответствии с координатами модели объекта 7 (см.[4], стр. 65. ..70, рис.2.8, 2.9). Т.е. приемное устройство 5 находится в режиме подслеживания за координатами модели объекта 7 Foвых(t), а объект 4 управляется по командам, пропорциональным координатам модели объекта 7.
Момент времени t2 характеризует вхождение объекта 4 в широкое поле управления приемного устройства 5 и начало управления объекта 4. В интервале времени t2. . . t3 осуществляется автосопровождение объекта 4 устройством 5 (см. [4], стр.63...65, рис.2.7). В этом случае формирование команд управления объектом 4 и моделью объекта 7 осуществляется по величине разности между входной координатой и координатой объекта 4, получаемой с выхода приемного устройства 5, ΔF(t)=Fвx(t)-Fвых(t). При этом передаточная функция выходного сигнала Fвых(t) через параметры системы и входное воздействие Fвx(t) имеет вид:

На этом интервале времени обеспечивается динамическая подстройка выходных координат модели объекта 7 под реальные координаты объекта 4.
Передаточная функция на выходе модели объекта 7 через параметры системы управления и входное воздействие Fвx(t) имеет вид:
При выполнении условий:
W7=W4 и W5=1 (13)
выражения (11) и (12) примут вид:
Следовательно, на выходе модели объекта 7 формируется координата Foвых(t), аналогичная выходной координате системы Fвых(t).
Передаточная функция на выходе модели объекта 7 через параметры системы управления и возмущающее воздействие Fп(t) по каналу измерения координат объекта 4 имеет вид:

При выполнении условия:
W9=W3 (17)
передаточная функция (15) обращается в нуль. Передаточная функция (16) при выполнении условия W4=W7 и W5=1 принимает вид:
т. е. в сравнении с передаточной функцией (14) обеспечивается с помощью Wf дополнительное подавление Fп на выходе объекта 4 при сохранении динамических характеристик (запасов устойчивости и т.д.) системы управления, так как характеристические уравнения (14) и (18) остаются неизменными.
Следовательно, в этом случае обеспечивается эффективное подавление возмущающих воздействий по каналу измерения координат объекта 4 как на выходе объекта 4, так и на выходе модели объекта 7.
Таким образом, в режиме автосопровождения (t2...t3) обеспечивается формирование на выходе модели объекта 7 координат Foвых(t), аналогичных выходным координатам объекта 4 Fвых(t) при эффективном подавлении возмущающих воздействий по каналу измерения координат объекта 4.
Момент времени t3 определяет отделение второго двигателя от объекта 4, нахождение этого двигателя в широком поле управления приемного устройства 5 и захват на сопровождение двигателя в широком поле управления. Однако, так как запомненная прогнозируемая координата объекта 4 и измеренная координата объекта отличаются на величину, большую по модулю Uоп, то компаратор устройства 15 переходит в режим превышения.
В интервале времени t3...t4, так как компаратор устройства 15 находится в режиме превышения, осуществляется управление объектом 4 и приемным устройством 5 в соответствии с координатами модели объекта 7 (см. [4], стр.65... 70, рис. 2.8, 2.9). Т.е. приемное устройство 5 находится в режиме подслеживания за координатами модели объекта 7 Foвых(t), а объект 4 управляется по командам, пропорциональным координатам модели объекта 7.
Момент времени t4 определяет появление источника излучения объекта 4 в узком поле управления приемного устройства 5.
Для времени работы системы управления t>t4 осуществляется автосопровождение источника излучения объекта 4 устройством 5 в узком поле управления (см. [4], стр.63...65, рис.2.7). В этом случае формирование команд управления объектом 4 и моделью объекта 7 осуществляется по величине разности между входной координатой и координатой объекта 4, получаемой с выхода приемного устройства 5, ΔF(t)= Fвx(t)-Fвых(t). Работа системы управления описывается выражениями (11)...(18).
Приведенный анализ показывает, что после отделения первого и второго двигателей даже при захвате их на сопровождение обеспечивается в условиях воздействия возмущающих факторов и помех устойчивое управление объектом 4. При этом во втором варианте системы управления обеспечивается подавление помех измерения координат объекта 4 при сохранении динамических характеристик системы.
Третий вариант системы управления, реализующий предлагаемые способы управления, работает следующим образом.
Рассмотрим работу системы управления. На выходе первого приемного устройства 1 формируется сигнал, пропорциональный изменению входного сигнала Fвx(t). Этот сигнал поступает на первый вход блока формирования ошибки 2, на второй вход которого поступает сигнал с выхода переключателя 14. На выходе блока формирования ошибки 2 вырабатывается сигнал, пропорциональный величине отклонения выходной координаты объекта Fвых(t) от входного сигнала Fвx(t): ΔF(t)=Fвx(t)-Fвых(t). Этот сигнал подается на второй вход блока формирования разности 8 и через первый фильтр 9 поступает на второй вход блока выработки команд 6. С выхода блока выработки команд 6 сигнал поступает на вход модели объекта 7. На выходе модели объекта 7 получается динамическая оценка отклонения выходной координаты объекта Fвых(t)от входного сигнала Fвх(t): ΔFo(t). Оценка отклонения ΔFo(t) с выхода модели объекта 7 поступает на первый вход блока формирования разности 8, на вход блока управления 3, сигнал с выхода которого поступает на первый вход блока выработки команд 6 и на второй вход сумматора 16, на первый вход которого подается через второй фильтр 17 сигнал с выхода первого приемного устройства 1. На выходе сумматора 16 получается оценка выходной координаты объекта Foвых(t). Оценка выходной координаты объекта Foвых(t) с выхода сумматора 16 через блок прогнозирования 10 и линию задержки 11 подается на первый вход переключателя 14, второй вход блока формирования переключающих сигналов 15 и на вход ключа 12, выход которого соединен с третьим входом второго приемного устройства 5. На выходе второго приемного устройства 5, на первый и второй вход которого подается сигнал с выхода объекта управления 4, вычисляется сигнал, пропорциональный координатам объекта управления 4 Fвых(t) и подается на второй вход переключателя 14 и на первый вход блока формирования переключающих сигналов 15, выход которого соединен с управляющими входами ключа 12 и переключателя 14. Преобразованный таким образом сигнал ошибки ΔF(t) в сигнал управления U(t) с выхода блока управления 3 воздействует на объект управления 4. Направление на объект 4 Fвых(t) смещается в пространстве, и исходное угловое рассогласование ΔF(t) между направлением на объект слежения Fвx(t) и на объект 4 Fвых(t) уменьшается.
Циклограмма работы ключей 12, 13, переключателя 14 и блока формирования переключающих сигналов 15 приведена на Фиг.4. Здесь "1" - ключи 12, 13 замкнуты, контакты переключателя 14 замкнуты, на выходе блока формирования переключающих сигналов (компаратор в режиме превышения опорного сигнала) логическая 1; "0" - ключи 12, 13 разомкнуты, контакты переключателя 14 разомкнуты, на выходе блока формирования переключающих сигналов (компаратор сработал) логический 0; "П14 нз" - нормально замкнутые контакты переключателя 14 между его вторым входом и выходом; "П14 нр" - нормально разомкнутые контакты переключателя 14 между его первым входом и выходом.
В интервалах времени t0. ..t2 и t3...t4 компаратор блока формирования переключающих сигналов 15 находится в режиме превышения опорного сигнала:
U - Uоп > Ue, (19)
где U - входной сигнал с выхода устройства выделения модуля блока формирования переключающих сигналов 15; Uоп - опорный сигнал, определяющий допустимую величину отличия реальной и запомненной прогнозируемой координат объекта 4; Ue - зона нечувствительности компаратора.
t2, t4 - определяют момент времени срабатывания компаратора блока формирования переключающих сигналов 15 по условию:
U - Uоп < Ue. (20)
В третьем варианте реализации системы управления повышение точности и надежности достигается путем:
- формирования на выходе устройства 16 сигнала, пропорционального оценкам координат объекта 4, с помощью элементов 6, 7, 8, 9;
- формирования прогнозируемых координат объекта 4 с помощью элемента 10 и 16;
- сравнения измеряемых и запомненных прогнозируемых координат объекта 4 и принятия решения об истинности измеряемых координат объекта 4 с помощью элементов 11 и 15;
- коммутации сигнала управления объектом 4 в случае сопровождения устройством 5 отделившегося двигателя с помощью элемента 14;
- коммутации сигнала управления приемным устройством 5 в случае сопровождения устройством 5 отделившегося двигателя с помощью элемента 12;
- определенной последовательности соединения вновь вводимых элементов 10...16 и выполнения определенных параметрических соотношений.
Обосновать работу третьего варианта системы управления можно следующим образом.
Момент времени t0 определяет старт объекта 4 и начало работы первого двигателя. До момента времени t1 объект 4 не находится в широком поле управления, т. е. отсутствуют координаты объекта 4. В этом случае компаратор устройства 15 находится в режиме превышения.
Момент времени t1 определяет отделение первого двигателя от объекта 4, появление этого двигателя в широком поле управления приемного устройства 5 и захват на сопровождение двигателя. Однако, так как запомненные прогнозируемые координаты объекта 4 и измеренные координаты двигателя отличаются на величину, большую по модулю Uоп, то компаратор устройства 15 находится в режиме превышения.
В интервале времени t0...t2, так как компаратор устройства 15 находится в режиме превышения, осуществляется управление объектом 4 и приемным устройством 5 в соответствии с координатами модели объекта 7 (см. [4], стр.65... 70, рис.2.8, 2.9). Т.е. приемное устройство 5 находится в режиме подслеживания за координатами на выходе устройства 16:
Foвых(t)=Foвx(t)-ΔFo(t), (21)
где Foвx(t) - сигнал с выхода второго фильтра 17, ΔFo(t) - оценка ошибки наведения ΔF(t), получаемая на выходе модели объекта 7, а объект 4 управляется по командам, пропорциональным величине ΔFo(t) на выходе модели объекта 7.
Момент времени t2 характеризует вхождение объекта 4 в широкое поле управления приемного устройства 5 и начало управления объекта 4. В интервале времени t2. . . t3 осуществляется автосопровождение объекта 4 устройством 5 (см. [4], стр.63...65, рис.2.7). В этом случае формирование команд управления объектом 4 и моделью объекта 7 осуществляется по величине разности между входной координатой и координатой объекта 4, получаемой с выхода приемного устройства 5,  F(t)=Fвx(t)-Fвых(t). При этом передаточная функция выходного сигнала Fвых(t) через параметры системы и входное воздействие Fвх(t) имеет вид:
F(t)=Fвx(t)-Fвых(t). При этом передаточная функция выходного сигнала Fвых(t) через параметры системы и входное воздействие Fвх(t) имеет вид:

При выполнении условий:
W7=W4 и W5=1 (23)
выражение (22) примет вид:
т.е. в сравнении с передаточной функцией (3) обеспечивается с помощью Wf дополнительное подавление помех измерения на входе системы управления при сохранении динамических характеристик (запасов устойчивости и т.д.) системы управления, так как в характеристическое уравнение (знаменатель) (24) не входит Wf.
На этом интервале времени обеспечивается динамическая подстройка выходных координат на выходе Foвых под реальные координаты объекта 4.
Передаточная функция на выходе устройства 16 через параметры системы управления и входное воздействие Fвx(t) имеет вид:
При выполнении условий:
W7=W4, W17=Wf и W5=1 (26)
выражение (25) примет вид:
Полученная передаточная функция (27) соответствует выражению (24). Следовательно, на выходе устройства 16 формируется координата Foвых(t), аналогичная выходной координате системы Fвых(t).
Таким образом, в режиме автосопровождения (t2. ..t3) обеспечивается формирование координат Foвых(t) на выходе устройства 16, аналогичных выходным координатам объекта 4 Fвых(t) при эффективном подавлении помех измерения как от объекта слежения, так и от объекта управления на входе системы управления.
Момент времени t3 определяет отделение второго двигателя от объекта 4, нахождение этого двигателя в широком поле управления приемного устройства 5 и захват на сопровождение двигателя в широком поле управления. Однако, так как запомненная прогнозируемая координата объекта 4 и измеренная координата объекта отличаются на величину, большую по модулю Uоп, то компаратор устройства 15 находится в режиме превышения.
В интервале времени t3...t4, так как компаратор устройства 15 находится в режиме превышения, осуществляется управление объектом 4 и приемным устройством 5 в соответствие с координатами модели объекта 7 (см. [4], стр.65.. . 70, рис. 2.8, 2.9). Т.е. приемное устройство 5 находится в режиме подслеживания за координатами на выходе устройства 16 Foвых(t), а объект 4 управляется по командам, пропорциональным величине ΔFo(t) на выходе модели объекта 7.
Момент времени t4 определяет появление источника излучения объекта 4 в узком поле управления приемного устройства 5.
Для времени работы системы управления t>t4 осуществляется автосопровождение источника излучения объекта 4 устройством 5 в узком поле управления (см. [4], стр.63...65, рис.2.7). В этом случае формирование команд управления объектом 4 и моделью объекта 7 осуществляется по величине разности между входной координатой и координатой объекта 4, получаемой с выхода приемного устройства 5, ΔF(t)= Fвx(t)-Fвых(t). Работа системы управления описывается выражениями (19)...(27).
Приведенный анализ показывает, что после отделения первого и второго двигателей даже при захвате их на сопровождение обеспечивается в условиях воздействия возмущающих факторов и помех устойчивое управление объектом 4. При этом в третьем варианте реализации системы управления обеспечивается подавление помех измерения координат объекта управления 4 и объекта слежения при сохранении динамических характеристик системы.
Установлено экспериментально, что (6), (14) и (27) справедливо, если для отношения коэффициентов передачи элементов систему управления в полосе рабочих частот выполняется зависимость:
Значения коэффициентов из диапазона 0,7...1,3 в (28) определяются при настройке каждого конкретного образца системы с целью наиболее полной реализации условия (6), (14) и (27). Это обстоятельство вызвано отличием параметров конкретного образца системы от номинала.
Следовательно, использование новых элементов 10. ..16, соединенных в соответствии с Фиг.1, 2 и 3 с указанными характеристиками (1)...(28) в предлагаемой системе управления выгодно отличает предлагаемое техническое решение от прототипа, так как обеспечивает повышение надежности управления объектом в моменты времени отделения двигателя и переключения полей управления приемного устройства объекта управления в условиях воздействия внешних возмущающих факторов и помех.
Источники информации
1. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965, с.28-30, рис.1.7.
2. Неупокоев Ф. К Стрельба зенитными ракетами. М.: Воениздат, 1991, с. 29-33, 62-64.
3. Способ управления и система управления для его осуществления. Понятский В. М., Ткаченко Ю.Н., Шипунов А.Г. (Россия). Патент 2103713, Заявка 96110062 (пол. реш. от 20.03.97), Россия, МКИ6 G 05 В 11/01, G 01 S 13/68. Заявл. 14.05.96.
4. Белянский П.В., Сергеев Б.Б. Управление наземными антеннами и радиотелескопами. М.: Сов. радио, 1980.
5. Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. М.: Радио и связь, 1981.
6. Кочетов В. Т. , Половко А.М., Пономарев В.М. Теория систем телеуправлния и самонаведения ракет. М.: Наука, 1964.
7. Петров Г.М., Лакунин Н.Б., Бартольд Э.Б. Методы моделирования систем управления на аналоговых и аналого-цифровых вычислительных машинах. М.: Машиностроение, 1977.
8. Горбацевич Е. Д., Левинзон Ф.Ф. Аналоговое моделирование систем управления. М.: Наука, 1984.
Изобретение относится к системам автоматического управления и может быть использовано в образцах техники, работающих в условиях воздействия помех и пропадания информационных сигналов, а также в установках для научных исследований. Техническим результатом заявленного изобретения является повышение точности и надежности работы системы управления при отделении двигателя, которое достигается тем, что в способе управления объектом до попадания объекта управления в поле управления формируют с помощью модели объекта управления координаты объекта управления, при попадании объекта управления в поле управления сравнивают измеренные координаты объекта управления с соответствующими текущему времени наведения координатами модели объекта управления, устанавливают пороговые значения величины ошибки между измеренными координатами объекта управления с соответствующими текущему времени наведения координатами модели объекта управления и, если ошибка между измеренными координатами объекта управления и соответствующими текущему времени наведения координатами модели объекта управления больше установленного порогового значения, то наведение объекта управления осуществляют по координатам модели объекта управления, если ошибка между измеренными координатами объекта управления и соответствующими текущему времени наведения координатами модели объекта управления меньше установленного порогового значения, то наведение объекта управления осуществляют по измеренным координатам объекта управления. 5 с.п.ф-лы, 4 ил.
| СПОСОБ УПРАВЛЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2103713C1 |
| DE 2907543 C1, 14.06.1984 | |||
| US 4406429 A, 27.09.1983 | |||
| УСТРОЙСТВО для ОБЕСПЕЧЕНИЯ СИНХРОННОЙ РАБОТЫ | 0 |
|
SU190742A1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕФОРМАЦИЙ НАРУЖНОГО НОСА ПРИ ВРОЖДЕННОЙ РАСЩЕЛИНЕ ВЕРХНЕЙ ГУБЫ И УСТРОЙСТВО ДЛЯ СНЯТИЯ ОТТИСКА КРАЯ ГРУШЕВИДНОГО ОТВЕРСТИЯ | 1993 |
|
RU2044517C1 |
| НЕУПОКОЕВ Ф.К | |||
| Стрельба зенитными ракетами | |||
| - М.: Воениздат, 1991. | |||

