Изобретение относится к области разработки систем наведения реактивных снарядов и может быть использовано в комплексах ПТУРС и ЗУРС.
Одной из задач, решаемых при разработке систем управления реактивными снарядами, является повышение точности наведения за счет уменьшения ошибок, возникающих, в частности, от действия на снаряд нормальных кинематических ускорений, например от действия силы тяжести. Основная составляющая такой ошибки при горизонтальном полете определяется выражением:
где g = 9,81 м/с2 - ускорение свободного падения;
kо - коэффициент передачи разомкнутого контура управления (КУ) снарядом (см. [1], с. 390, зависимость 7.34).
Такая задача может быть решена при формировании программной команды управления снарядом в соответствии с зависимостью:
Это выражение считается достаточным условием компенсации кинематического ускорения от действия силы тяжести (см. [1], с. 394).
Коэффициент передачи разомкнутого контура kо определяется (см. [1], с. 384; с. 106, зависимость 2.82) как
kо = KАУKснV (2)
где KАУ - коэффициент передачи аппаратуры управления от отклонения снаряда от линии прицеливания к углу отклонения руля;
Kсн - коэффициент передачи снаряда по угловой скорости  вращения вектора скорости;
вращения вектора скорости;
V - продольная скорость снаряда.
Коэффициент снаряда по угловой скорости вращения вектора скорости с учетом зависимостей для определяющих его параметров (см. [1], с. 106, зависимость 2.85; [9], с. 191) можно представить следующим образом:
Kсн= K
где K
Коэффициент передачи аппаратуры управления выбирается в процессе проектирования исходя из условия обеспечения устойчивости контура управления и в общем случае может быть записан как
KAУ = K
где K
m = -1...0 - параметр, выбираемый в процессе проектирования, конкретный для конкретной системы управления;
т.е. КАУ обратно пропорционален скорости снаряда или степени из нее (при m = 0 и K
Таким образом, выражение (2) для коэффициента передачи разомкнутого контура управления с учетом (3), (4) можно записать в виде
k0 = K
где k = K
n = m + 2 = 1...2 - фиксированный параметр для конкретной системы управления;
а условие компенсации (1) будет выглядеть
Известен способ формирования команды управления вращающимся по крену снарядом, включающий формирование постоянного сигнала и его модуляцию частотой вращения снаряда по крену.
Устройство, реализующее этот способ (см. [2], с. 13-19), включает последовательно соединенные источник постоянного сигнала, усилитель и гирокоординатор (измеритель угла крена), а также инвертор между выходом усилителя и вторым входом гирокоординатора.
При этом гирокоординатор выполняет функцию модуляции входного сигнала сигналом частоты вращения снаряда по крену, формируя таким образом сигнал управления рулевым приводом.
В соответствии с известным способом формируется постоянная команда управления по зависимости:
где V
Kср - значение коэффициента k, определяемое как среднее для всего участка управляемого полета.
Недостатком известного способа является снижение точности наведения из-за наличия нескомпенсированной ошибки, возникающей при изменении в процессе полета скорости снаряда V(t) (например, в зависимости от режима работы двигателя снаряда), т.е. Vр ≠ V(t).
Наиболее близок к предлагаемому способ формирования команды управления вращающимся по крену снарядом, включающий формирование программно-временного сигнала, его модуляцию частотой вращения по крену и выработку соответственно полученному результату сигнала управления рулевым приводом.
Устройство, реализующее этот способ (см. [3], с. 12-13), содержит последовательно соединенные источник программно-временного сигнала (схема компенсации веса) и модулятор (блок управления), а также измеритель угла крена (разделительные фильтры блока формирования команд), выход которого соединен со вторым входом модулятора.
Выполнение операций известного способа осуществляется следующим образом.
Формирование программно-временного сигнала осуществляется программно-временным источником сигнала (схемой компенсации веса) в соответствии с зависимостью:
где Vр(t) - расчетное значение скорости снаряда в зависимости от полетного времени t, определяемое априорно.
Модуляция частотой вращения снаряда по крену производится модулятором, на входы которого поступает сигнал hк1 и периодический сигнал с измерителя угла крена. Результат модуляции является сигналом управления рулевым приводом.
Формирование команды управления в соответствии с известным способом позволяет повысить точность компенсации кинематического ускорения от действия силы тяжести при изменяющейся в процессе полета скорости снаряда.
Поскольку истинная скорость ракеты V(t), определяемая в соответствии с дифференциальным уравнением (см. [1], с. 81, зависимость 2.9, с. 83):
где m - масса ракеты;
P -сила тяги двигателя ракеты;
α - угол атаки ракеты;
C - коэффициент лобового сопротивления;
ρ - плотность окружающего воздуха;
S - площадь миделя;
G - сила веса;
θ - угол наклона траектории ракеты;
отличается от расчетного значения скорости Vр(t) вследствие различия климатических условий стрельбы (температуры окружающего воздуха, атмосферного давления и т. п.) точность реализации зависимости (1) снижается, что приводит к возникновению нескомпенсированной части ошибки наведения Δ1, которая определяется выражением:
Δ1 = hg+hk1
или
Целью предлагаемого изобретения является повышение точности наведения вращающегося по крену снаряда за счет учета изменения его продольной скорости от времени полета при формировании команды управления.
Поставленная цель достигается за счет того, что в способе формирования команды управления вращающимся по крену с помощью аэродинамических сил снарядом, включающем формирование программно-временного сигнала, модуляцию этого сигнала частотой вращения снаряда по крену и выработку соответственно ему сигнала управления рулевым приводом, формируют сигнал, пропорциональный степени n отношения частоты вращения снаряда по углу крена в момент начала управления к текущей частоте вращения снаряда, этим сигналом модулируют программно-временной сигнал, а затем сигнал, полученный в результате этой модуляции, модулируют частотой вращения снаряда по крену.
Сущность предлагаемого изобретения заключается в следующем.
Как было показано выше, причиной снижения точности наведения снаряда при формировании команды управления известным способом является изменение в полете продольной скорости снаряда относительно расчетной в зависимости от климатических условий стрельбы.
Учет этого изменения требует наличия на борту снаряда датчика продольной скорости, что значительно усложняет конструкцию снаряда. В то же время у вращающихся по крену снарядов на борту имеется информация о частоте вращения по крену (сигнал с датчика гирокоординатора).
Достижение поставленной цели основано на том, что у снарядов, вращающихся по крену с помощью аэродинамических сил от набегающего потока воздуха (например, за счет установки стабилизаторов относительно продольной оси снаряда под углом δэ), угловая скорость вращения по крену γ(t), как следует из приведенной в [8] на с. 593 зависимости (13.13), пропорциональна продольной скорости снаряда:
γ(t) = V(t)δэkx (8)
где kх - коэффициент, зависящий от конструктивных параметров снаряда.
Это дает возможность использовать γ(t) как информацию о величине V(t) и преобразовать условие полной компенсации (5), заменив V(t) на γ(t) с учетом (8), к виду:
Однако формирование команды управления в зависимости от абсолютного значения  требует дополнительно учитывать конструктивные параметры снаряда, влияющие на его угловую скорость вращения по крену (угол установки стабилизаторов, габаритно-массовые характеристики), что снижает точность выполнения условия компенсации (1) из-за разбросов указанных параметров в пределах их технологических допусков в процессе производства снарядов.
требует дополнительно учитывать конструктивные параметры снаряда, влияющие на его угловую скорость вращения по крену (угол установки стабилизаторов, габаритно-массовые характеристики), что снижает точность выполнения условия компенсации (1) из-за разбросов указанных параметров в пределах их технологических допусков в процессе производства снарядов.
С целью исключения влияния дополнительных технологических погрешностей на точность формирования команды управления предлагается учитывать изменение угловой скорости вращения относительно угловой скорости, определенной в момент начала управления снарядом:
где t0 - время начала управления.
Относительное изменение угловой скорости с учетом (8) можно определить как
Тогда, если записать тождественное выражению (5) равенство в виде
то с учетом (9) условие полной компенсации примет вид:
или
Анализ выражения (10) показывает, что для формирования команды управления необходимо знание следующих величин:
коэффициента k(t), который, как было указано выше, практически не зависит от климатических условий стрельбы и учитывается посредством реализации его расчетного значения аналогично известному способу операцией формирования программно-временного сигнала;
относительного изменения частоты вращения снаряда по крену, определяемого непосредственным измерением, например, периода опорного сигнала крена или какой-либо части периода;
значения продольной скорости ракеты в момент начала управления, которое определяется расчетным путем и учитывается при формировании программно-временного сигнала достаточно точно, т.к. за время t0, которое обычно составляет 0,1-1,0 с, климатические факторы интегрального характера, как видно из выражения (6) (сила тяги двигателя, плотность окружающего воздуха), влияющие на изменение V(t) пропорционально времени их действия, не вносят существенных изменений в величину продольной скорости V(t0) в момент начала управления относительно ее расчетного значения Vp(t0), т.е. V(t0) ≈ Vp(t0).
Таким образом, при формировании команды управления в соответствии с зависимостью (10) не требуется прогнозирование скорости снаряда на всем участке полета, время которого для ПТУРС может превышать 30 с, что в прототипе приводило к значительным отклонениям истинной величины V от расчетной под действием указанных выше климатических факторов.
Сформированный по зависимости (10) сигнал затем модулируют частотой вращения снаряда по крену и вырабатывают соответственно полученному результату сигнал управления рулевым приводом. Эти операции способа выполняются аналогично известным.
Эффективность предлагаемого способа может быть оценена по величине нескомпенсированной части ошибки наведения:
Δ2 = hg+hk2
или
Сравнивая последнее выражение с зависимостью (7) получим:
Обозначив относительные ошибки прогнозирования скорости как:
и
получим
т.е. при t > t0 достигается положительный эффект, т.к.

Более наглядно эффективность предлагаемого способа можно продемонстрировать, представив выражение для скорости, например, при горизонтальном полете и без учета сопротивления воздуха согласно уравнению (6) в виде
и, приняв P(t) = const, m(t) = const, т.к. эти параметры являются квазипостоянными (медленно меняющимися в процессе полета), получим
где  продольное ускорение ракеты.
продольное ускорение ракеты.
Записав выражение для  как
как
где  расчетное значение продольного ускорения;
расчетное значение продольного ускорения; отклонение истинного значения V от расчетного вследствие климатических факторов;
отклонение истинного значения V от расчетного вследствие климатических факторов;
получим выражение для скорости в виде
или с учетом того, что
получим
Подставляя последние выражения в зависимость (11) и положив для примера n = 1 (т.е. рассматривая вариант с наименьшей эффективностью), получим
откуда следует, что положительный эффект в предлагаемом способе достигается при t > t0, т.к.

т. е. за счет более точного прогнозирования величины продольной скорости снаряда в момент начала управления по сравнению с ее значениями на всем участке наведения.
Как было показано выше, такое условие является выполнимым, т.к. время начала управления t0 на 1-2 порядка меньше полного времени процесса наведения.
Предложенный способ может быть реализован путем введения в состав известного устройства формирования команды управления вращающимся по крену снарядом, включающего источник программно-временного сигнала, а также последовательно соединенные измеритель угла крена и модулятор, дополнительно измерителя периода сигнала крена, вход которого соединен с выходом измерителя угла крена, запоминающего устройства, вход которого соединен с выходом измерителя периода, временного блока, выход которого соединен с управляющим входом запоминающего устройства, блока деления, вход делимого которого соединен с выходом измерителя периода, а вход делителя соединен с выходом запоминающего устройства, функционального преобразователя возведения в степень, вход которого соединен с выходом блока деления и второго модулятора, первый вход которого соединен с выходом источника программно-временного сигнала, второй вход соединен с выходом функционального преобразователя возведения в степень, а выход соединен со вторым входом первого модулятора.
Предлагаемое устройство пояснено на фиг. 1, где последовательно соединены источник программно-временного сигнала 1, второй модулятор 2, первый модулятор 3, а также измеритель угла крена 5, измеритель периода 6, вход которого соединен с выходом измерителя угла крена 5, запоминающее устройство 7, вход которого соединен с выходом измерителя периода 6, временной блок 4, выход которого соединен с управляющим входом запоминающего устройства 7, блока деления 8, вход делимого которого соединен с выходом измерителя периода 6, а вход делителя соединен с выходом запоминающего устройства 7, функциональный преобразователя 9 возведения в степень, вход которого соединен с выходом блока деления 8, выход соединен со вторым входом второго модулятора 2, а выход измерителя угла крена 5 соединен со вторым входом первого модулятора 3.
Устройство работает следующим образом.
Источник программно-временного сигнала 1 вырабатывает в течение времени полета сигнал U(t) по расчетной программе, учитывающей величины ускорения свободного падения, коэффициентов передачи элементов КУ и продольной скорости в момент t0 в соответствии с зависимостью
Измеритель угла крена 5 вырабатывает периодический сигнал с частотой, равной частоте вращения снаряда по крену, который поступает на модулятор 3 и блок измерения периода 6.
Блок измерения периода выдает сигнал, пропорциональный периоду следования своего входного сигнала (периоду T вращения снаряда по крену), который поступает на вход запоминающего устройства 7 и вход делимого блока деления 8.
В момент t0 временной блок 4 формирует сигнал управления запоминающим устройством, под действием которого последнее запоминает выходной сигнал блока измерения периода T(t0) в момент времени t0.
С этого момента времени выходной сигнал блока деления 3, на вход делителя которого поступает сигнал с запоминающего устройства, будет изменяться в соответствии с отношением  (до момента времени t0 это отношение будет равняться 1).
(до момента времени t0 это отношение будет равняться 1).
Сигнал с блока деления 8 поступает на функциональный преобразователь 9 возведения в степень, который вырабатывает сигнал 
Этим сигналом при помощи модулятора 2 осуществляется модуляция выходного сигнала U(t) источника программно-временного сигнала, в результате которой вырабатывается сигнал вида:
удовлетворяющий в соответствии с предлагаемым способом условию компенсации кинематического ускорения от действия силы тяжести.
Полученный сигнал преобразуется во вращающуюся со снарядом систему координат посредством его модуляции опорными сигналами крена модулятором 3. Этот сигнал является командой управления рулевым приводом снаряда.
Таким образом, команда управления формируется с учетом относительного изменения частоты вращения снаряда по крену, а следовательно, и его продольной скорости, чем достигается повышение точности наведения в условиях изменения скорости снаряда относительно расчетного значения.
Предлагаемое устройство может быть реализовано с применением серийно изготавливаемого измерителя угла крена - разделительных фильтров [3].
В качестве источника программно-временного сигнала может быть использована схема, представленная в [4] на с. 157.
В качестве сумматора, модулятора и блока деления могут быть использованы схемы, представленные в [5] на страницах соответственно 137, 162, 166.
При n = 1 функциональный преобразователь возведения в степень отсутствует, при n = 2 он является модулятором, на оба входа которого подается один и тот же сигнал, при 1 < n < 2 функциональный преобразователь может быть реализован в соответствии со схемой, представленной в [4] на с. 157.
В качестве измерителя периода может быть использован, например, преобразователь КР1108ПП1, работающий в режиме преобразования частоты в напряжение (см. [6], с. 90, рис. 56).
Запоминающее устройство может быть реализовано, например, в соответствии со схемой, приведенной в [5] на с. 250.
В качестве временного блока может быть использована схема, представленная в [7] на с. 81.
Эффективность предлагаемого способа и устройства подтверждена при разработке систем наведения управляемых снарядов и может быть продемонстрирована на примере характеристик снаряда 9М119М.
Так, в диапазоне температур окружающего воздуха минус 50oC...50oC продольная скорость снаряда 9М119М изменяется в диапазоне:
В момент начала управления (0,3 c) - 344...364 м/с
В момент времени t = 5,0 с - 264...378 м/с
Принимая за расчетное значение скорости среднее арифметическое ее крайних значений в данный момент времени, получим

что позволяет прогнозировать скорость снаряда с относительной погрешностью не менее

С учетом зависимости (8) можно определить, что предлагаемое устройство позволяет уменьшить ошибку наведения изделия 9М119М на участке полета t = 5 с по сравнению с прототипом в 6,3 раза, поскольку V(0,3 c)
Таким образом, предлагаемый способ и устройство позволяют повысить точность наведения вращающихся по крену снарядов за счет уменьшения динамических ошибок от действия кинематических ускорений в условиях отклонения истинной скорости снаряда от расчетных значений.
Источники информации
1. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами, М.:" Машиностроение", 1965.
2. Выстрел 3 УБК 10-3 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации 3 УБК 10-3.00.00.000 ТО, М.: Военное издательство, 1987.
3. Пусковое устройство 9П151. Техническое описание. 9П151.00.000 ТО, 1992.
4. У. Титце, К. Шенк. Полупроводниковая схемотехника. М.: "Мир", 1982.
5. Тетельбаум И.М., Шнейдер Ю.Р. Практика аналогового моделирования динамических систем. М.: "Энергоатомиздат", 1987.
6. Массовая библиотека инженера "Электроника" В/К 41.
7. В. Н. Вениаминов, О.Н. Лебедев, А.И. Мирошниченко. Микросхемы и их применение. М.: "Радио и связь", 1989.
8. А.А. Лебедев, Л.С. Чернобровкин. Динамика полета. М.: "Машиностроение", 1973.
Под ред. Л. С. Чернобровкина. Беспилотные летательные аппараты. М.: "Машиностроение", 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ ОДНОКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2473864C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2002 |
|
RU2234671C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548687C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126522C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2540483C1 |
Изобретение относится к разработке систем наведения реактивных снарядов и может быть использовано в комплексах ПТУРС и ЗУРС. Изобретение предназначено для решения задачи повышения точности наведения снаряда за счет уменьшения ошибки, возникающей от действия на снаряд силы тяжести, которая в общем случае обратно пропорциональна продольной скорости снаряда или ее квадрату. Сущность предлагаемого изобретения заключается в том, что формируемый программно-временной сигнал дополнительно модулируется сигналом 1-й или 2-й степени отношения частоты вращения снаряда по углу крена в момент начала управления к текущей частоте вращения снаряда по углу крена. Перед модуляцией сигналом частотой вращения снаряда по углу крена формируют сигнал в соответствии с зависимостью  где U(t) - программно-временной сигнал,
где U(t) - программно-временной сигнал,  частота вращения снаряда по углу крена в момент to начала управления,
частота вращения снаряда по углу крена в момент to начала управления,  текущая частота вращения снаряда по углу крена, n = 1. . 2. Устройство формирования команды управления снарядом включает источник программно-временного сигнала, а также последовательно соединенные измеритель угла крена и модулятор. В устройство дополнительно введены измеритель периода сигнала крена, вход которого соединен с выходом измерителя угла крена, запоминающее устройство, вход которого соединен с выходом измерителя периода, временной блок, выход которого соединен с управляющим входом запоминающего устройства, блок деления, вход делимого которого соединен с выходом измерителя периода, а вход делителя соединен с выходом запоминающего устройства, функциональный преобразователь возведения в степень, вход которого соединен с выходом блока деления, и второй модулятор, первый вход которого соединен с выходом источника программно-временного сигнала, второй вход соединен с выходом функционального преобразователя возведения в степень, а выход соединен со вторым входом первого модулятора. 2 с.п. ф-лы, 1 ил.
текущая частота вращения снаряда по углу крена, n = 1. . 2. Устройство формирования команды управления снарядом включает источник программно-временного сигнала, а также последовательно соединенные измеритель угла крена и модулятор. В устройство дополнительно введены измеритель периода сигнала крена, вход которого соединен с выходом измерителя угла крена, запоминающее устройство, вход которого соединен с выходом измерителя периода, временной блок, выход которого соединен с управляющим входом запоминающего устройства, блок деления, вход делимого которого соединен с выходом измерителя периода, а вход делителя соединен с выходом запоминающего устройства, функциональный преобразователь возведения в степень, вход которого соединен с выходом блока деления, и второй модулятор, первый вход которого соединен с выходом источника программно-временного сигнала, второй вход соединен с выходом функционального преобразователя возведения в степень, а выход соединен со вторым входом первого модулятора. 2 с.п. ф-лы, 1 ил.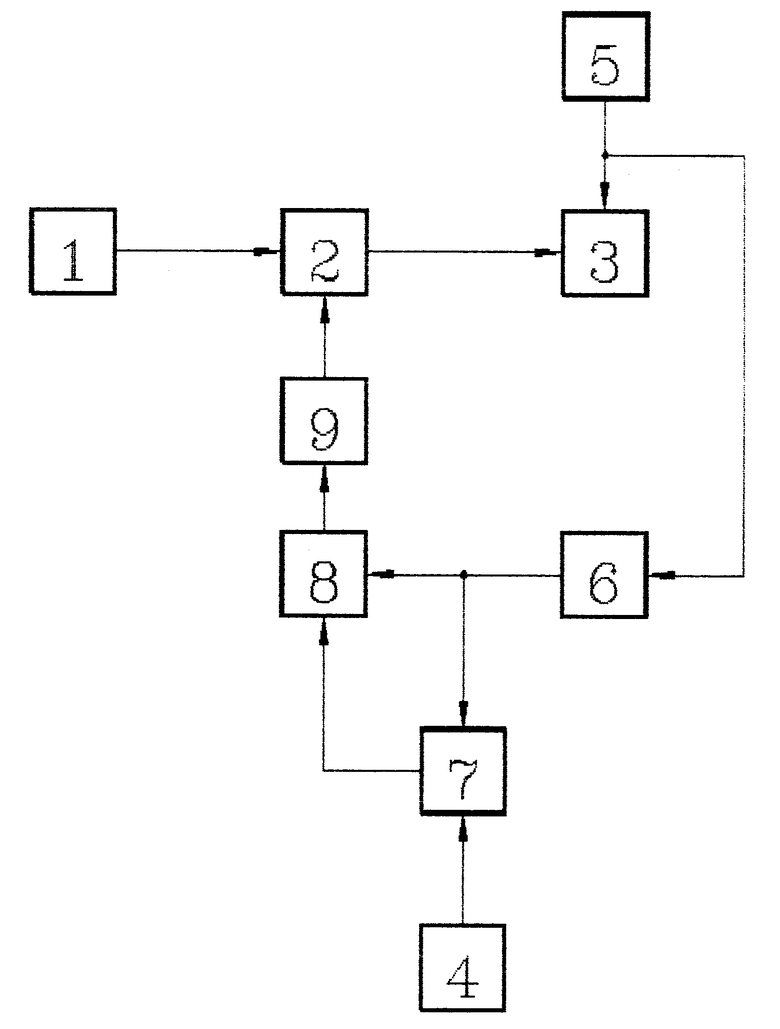

где U(t) - программно-временной сигнал; частота вращения снаряда по углу крена в момент t0 начала управления;
частота вращения снаряда по углу крена в момент t0 начала управления; текущая частота вращения снаряда по углу крена;
текущая частота вращения снаряда по углу крена;
n = 1 ... 2.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Самонаправляющееся боевое средство | 1949 |
|
SU837143A2 |
| RU 94000376 A1, 20.08.96 | |||
| RU 94045441 A1, 20.10.96 | |||
| US 4542870 A, 24.09.85 | |||
| US 4568039 A, 04.02.86 | |||
| DE 3228461 A1, 09.02.84 | |||
| DE 4007712 A1, 12.09.91. | |||
