Изобретение относится к машиностроению и может быть использовано при автоматизации работ в труднодоступных местах и зонах с повышенной опасностью.
Наиболее близким к заявленному по своей технической сущности является известное транспортное средство для перемещения по произвольно ориентированным в пространстве поверхностям (патент РФ №2092369 В 62 Д 57/032, 57/02, В-60, В 39/00 18.03.96). Транспортное средство содержит две связанные между собой подвижным соединением платформы, каждая из которых снабжена вакуумными захватами. Одна из платформ снабжена средством передвижения, которое выполнено в виде двух расположенных на одной оси вращения колес с независимыми приводами, а вакуумные захваты размещены между колесами.
Недостатком известного транспортного средства является тот факт, что оно может перемещаться по плоскостям лишь с помощью одной платформы, на которой размещены колеса, что снижает скорость маневрирования и устойчивость на преодолеваемых плоскостях.
Заявляемое изобретение направлено на повышение скорости маневрирования и устойчивости.
Указанный результат достигается тем, что транспортное средство для перемещения по произвольно ориентированным в пространстве поверхностям содержит две платформы с вакуумными захватами, каждая из которых имеет независимый друг от друга колесный движитель, а связаны платформы между собой не традиционными громоздкими шарнирами с использованием электродвигателей с редукторами, а изгибающимся на угол от 0° до 90° сильфоном под воздействием поступающего в него под давлением газа (водорода) из термосорбционного газового аппарата цилиндрической формы. Кроме того, предлагаемая конструкция позволяет платформам разворачиваться друг относительно друга на 360° при переходе с одной поверхности на другую, произвольно расположенным в пространстве.
Сущность заявляемого транспортного средства поясняется графическими схемами.
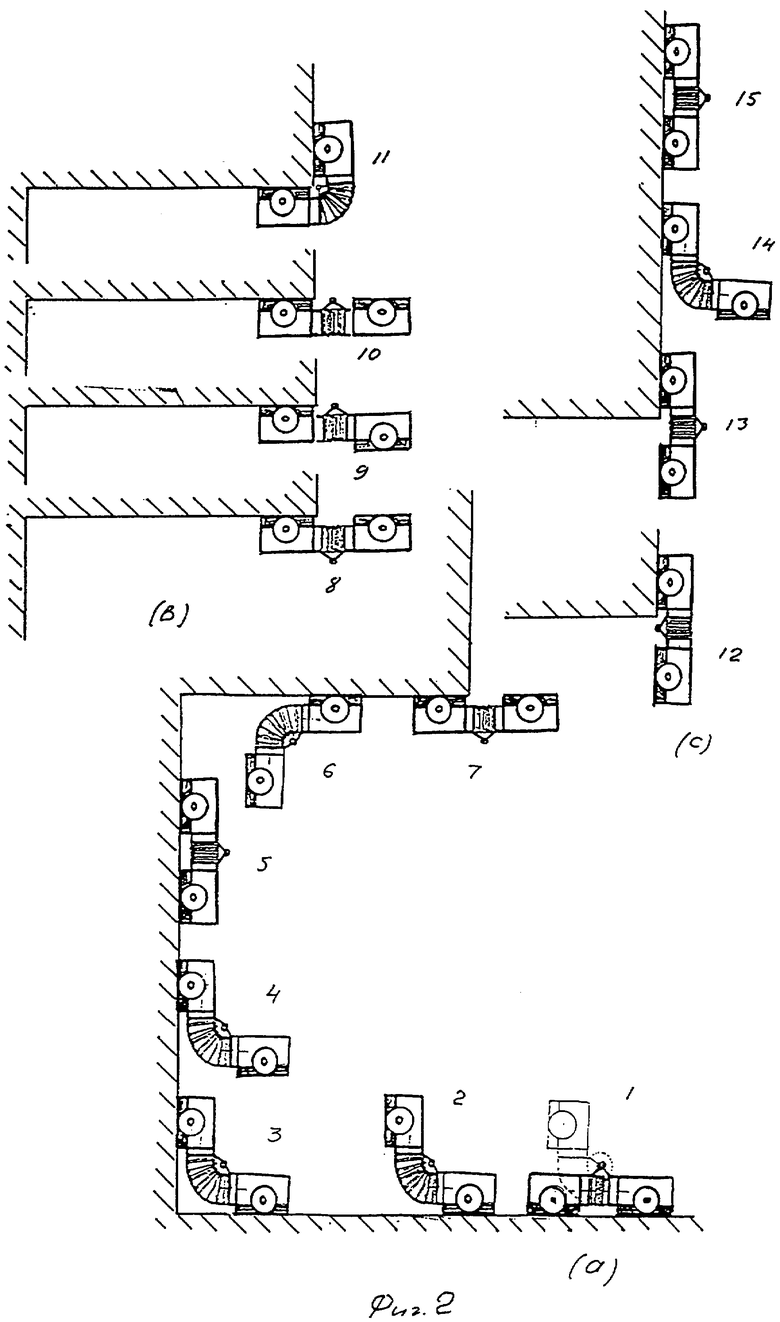
На Фиг.1 (a, b, c, d) представлен схематично общий вид транспортного средства; Фиг.1(a) - вид сбоку; Фиг.1(b) - соединяющий две платформы сильфон под воздействием водорода максимально развернул одну платформу относительно другой, которая с помощью вакуумного захвата удерживается на поверхности, на 90° в одной плоскости; Фиг.1(c) - поднятая платформа развернута на 90°, Фиг.1 (d) - вид спереди (сзади). На Фиг.2 (a, b, c) схематично показана последовательность положений транспортного средства при переходе с одной поверхности на другую.
Транспортное средство содержит две платформы 1, 2, которые соединены газовым сильфоном 3, соединенным с термосорбционным газовым аппаратом (конструкция аппарата и его соединение с сильфоном не показаны, т.к. возможны несколько технических и конструкторских решений); каждая из платформ снабжена вакуумным захватом 4, соединенным с источником вакуума (например, вентиляторы или вакуумные насосы). Обе платформы снабжены парой колес 5, установленных на одной оси вращения. Причем оси, на которых закреплены колеса, могут быть выполнены отдельно для каждого из колес или быть общей. Каждое колесо снабжено индивидуальным приводом (на схеме не показано). При этом размер колес такой, что точка контакта беговой дорожки колеса с поверхностью перемещения находится в одной плоскости с краями эластичной юбки вакуумных захватов независимо от взаимного расположения платформ. Края эластичной юбки вакуумного захвата выполнены из антифрикционного материала.
Газовый сильфон 3 с платформами 1 и 2 соединен с помощью поворотных (на 360°) устройств 6 и 7 соответственно. Конструкция поворотных устройств не приводится, т.к. все ее возможные рациональные варианты известны - зубчатые колеса, электродвигатель, редуктор.
С поворотными устройствами 6 и 7 газовый сильфон 3 соединен посредством соединительных элементов 8 и 9 соответственно. В одном из соединительных элементов крепится термосорбционный газовый аппарат, имеющий выход в полость газового сильфона. Газовый сильфон 3 в разрезе имеет квадратное сечение, т.к. именно такая форма позволяет надежно "связать" верхнюю его грань продолговатым (по ширине грани) шарниром 10, что обеспечивает изгиб газового сильфона на углы от 0° до 90° при наполнении его водородом под давлением.
Предлагаемое транспортное средство при реализации его функций может быть снабжено различными датчиками, видеосистемами, манипуляторами, различными рабочими блоками, узлами и т.д., которые в заявке не рассматриваются, т.к. не имеют отношения к сущности изобретения.
Устройство функционирует следующим образом. При перемещении по горизонтальным поверхностям (или под небольшими, в несколько градусов, углами к горизонту) вакуумные захваты 4 транспортного средства (ТС) отключены от источника вакуума и перемещение осуществляется за счет вращения колес 5, приводимых в действие приводами по командам с пульта управления.
На Фиг.2 (а, b, с) схематично изображен переход ТС с горизонтальной поверхности на поверхность вертикальную, затем потолочную горизонтальную и на вертикальную, расположенную под углом 90° по отношению к потолочной и под углом 270° по отношению к первоначальной горизонтальной.
Для перехода ТС с одной поверхности на другую с углами от 0° до 90°, например с пола на одну из стен, ТС с неработающими вакуумными захватами подходит к стене на определенное расстояние, определяемое габаритами взаимодействующих систем и механизмов (заданное расстояние может контролироваться датчиками расстояния и угловыми) (см. Фиг.2а), и по команде с пульта управления или от датчика расстояния в работу включается вакуумный захват платформы 2. Платформа 2 "присасывается" к горизонтальной поверхности; далее включается термосорбционный газовый аппарат и в результате создаваемого давления в газовом сильфоне, сильфон изгибается (в данном случае) на 90°, Фиг.2а-2. Затем ТС, подходя к стене, соприкасается с ней вакуумным захватом платформы 1, и ее вакуумный захват ″присасывается″ к стене, а вакуумный захват платформы 2 гасит вакуум, Фиг.2а-3. Когда ТС займет положение Фиг.2а-5, аналогичным образом происходит перемещение ТС на потолок. Чтобы выйти с потолка на вертикальную поверхность, соответствующим образом работают поворотные устройства 6, 7. На Фиг.2b - 8, 9, 10, 11 и Фиг.2(с) - 12, 13, 14, 15 показано дальнейшее продвижение ТС.
Таким образом, предлагаемое транспортное средство сочетает в себе простоту конструкции, новейшую технологию, высокую маневренность, возможность перемещаться с поверхности на поверхность, расположенные по отношению друг к другу под различными углами, возможность преодолевать трещины, уступы, обеспечивает значительное снижение времени на выполнение того или иного маневра.
Изобретение относится к машиностроению и может быть использовано при автоматизации работ в труднодоступных местах и зонах с повышенной опасностью. Транспортное средство для перемещения по произвольно ориентированным в пространстве поверхностям содержит две снабженные вакуумными захватами связанные между собой подвижным соединением платформы. Каждая из платформ имеет независимый друг от друга колесный движитель. Вакуумные захваты размещены между колесами. Подвижное соединение между платформами выполнено в виде газового сильфона, соединенного с платформами с помощью поворотных на 360° устройств и имеющего в сечении квадратную форму, на одной из граней которой на середине находится шарнир, соединенный с элементами крепления сильфона к той и другой платформе и обеспечивающий изгиб сильфона от 0° до 90° при поступлении в него газа под контролируемым давлением из термосорбционного газового аппарата, закрепленного в одном из указанных элементов крепления и имеющего выход в полость газового сильфона. Технический результат - повышение скорости меневрирования и устойчивости. 2 ил.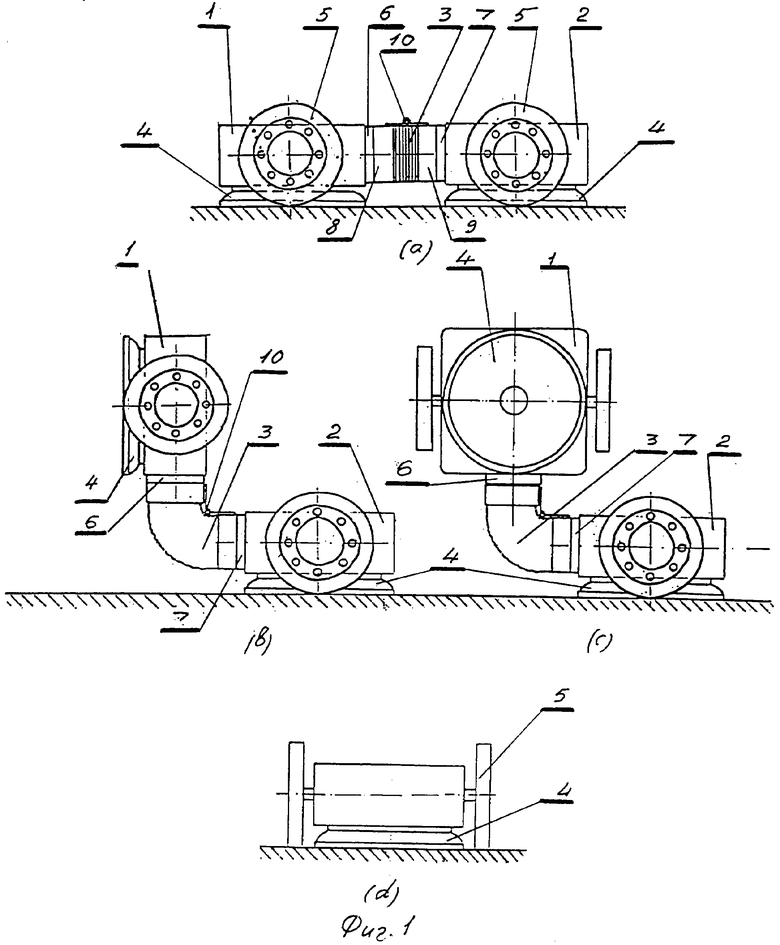
Транспортное средство для перемещения по произвольно ориентированным в пространстве поверхностям, содержащее две снабженные вакуумными захватами связанные между собой подвижным соединением платформы, отличающееся тем, что каждая из платформ имеет независимый друг от друга колесный движитель, при этом вакуумные захваты размещены между колесами, подвижное соединение между платформами выполнено в виде газового сильфона, соединенного с платформами с помощью поворотных на 360° устройств и имеющего в сечении квадратную форму, на одной из граней которой на середине находится шарнир, соединенный с элементами крепления сильфона к той и другой платформе и обеспечивающий изгиб сильфона от 0 до 90° при поступлении в него газа под контролируемым давлением из термосорбционного газового аппарата, закрепленного в одном из указанных элементов крепления и имеющего выход в полость газового сильфона.
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1996 |
|
RU2092369C1 |
| Шагающее транспортное средство | 1975 |
|
SU734055A1 |
| СПОСОБ ПРОИЗВОДСТВА ШЕСТИГРАННЫХ ТРУБ-ЗАГОТОВОК РАЗМЕРОМ "ПОД КЛЮЧ" 255±2,0×5,0+1,5/-1,0×4300+80/-30 мм ДЛЯ УПЛОТНЕННОГО ХРАНЕНИЯ И ТРАНСПОРТИРОВКИ ОТРАБОТАННОГО ЯДЕРНОГО ТОПЛИВА | 2013 |
|
RU2557383C2 |
| ГИДРОЦИЛИНДР | 0 |
|
SU305299A1 |

