Изобретение относится к машиностроению и может быть использовано при автоматизации работ в труднодоступных местах и зонах с повышенной опасностью.
Наиболее близким к заявляемому по своей технической сущности является транспортное средство по Патенту РФ №2175945 от 05.07.2000 г.
Однако его недостатком является тот факт, что имеющиеся элементы фиксации обеспечивают перемещение в трубах лишь в одном направлении и не могут обеспечивать ему перемещение в грунте.
Задача изобретения - повышение маневренности и устойчивости транспортного средства наподобие гусеницы при передвижении по произвольно ориентированным в пространстве поверхностям.
Предлагаемое техническое решение позволяет транспортному средству (ТС) преодолевать значительные трещины, выступы, передвигаться по трубам соответствующих диаметров как по внешним, так и по внутренним поверхностям.
Указанный результат достигается тем, что ТС для перемещения по произвольно ориентированным в пространстве поверхностям содержит, как минимум, две платформы с вакуумными захватами, независимыми друг от друга, и соединенные между собой не традиционными громоздкими шарнирами с использованием электродвигателей и различной конструкции редукторов, а изгибающимися на угол от 0° до 90° сильфонами под воздействием поступающего в них под давлением газа (водорода) из термосорбционных газовых аппаратов. Кроме того, предлагаемая конструкция позволяет сильфонам разворачиваться друг относительно друга на 360° в зависимости от преодолеваемой трассы.
Сущность заявляемого ТС поясняется графическими схемами.
На Фиг.1 (а, b) представлен схематично общий вид ТС в начальном состоянии (а) и в состоянии передвижения (b), например, когда все четыре сильфона изогнуты на 90° под воздействием поступающего в них газа. Вид сбоку.
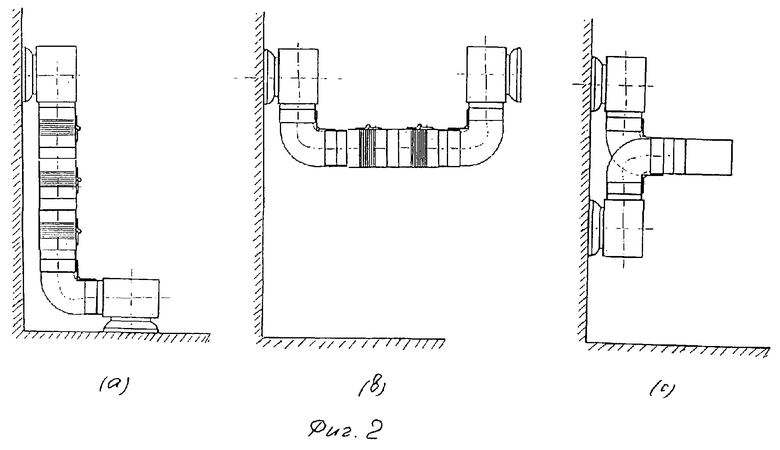
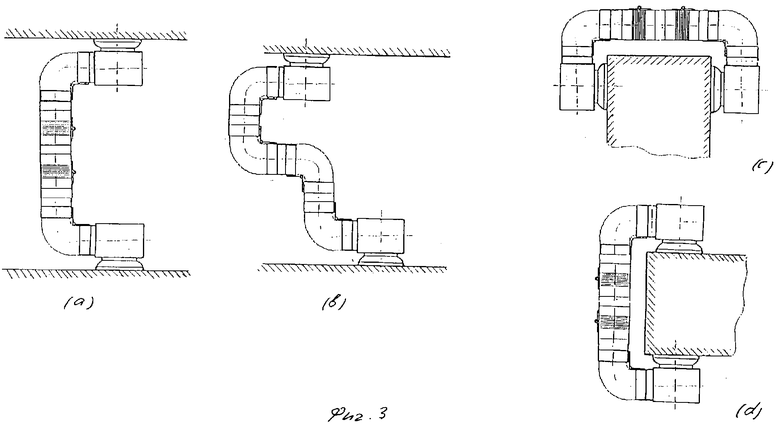
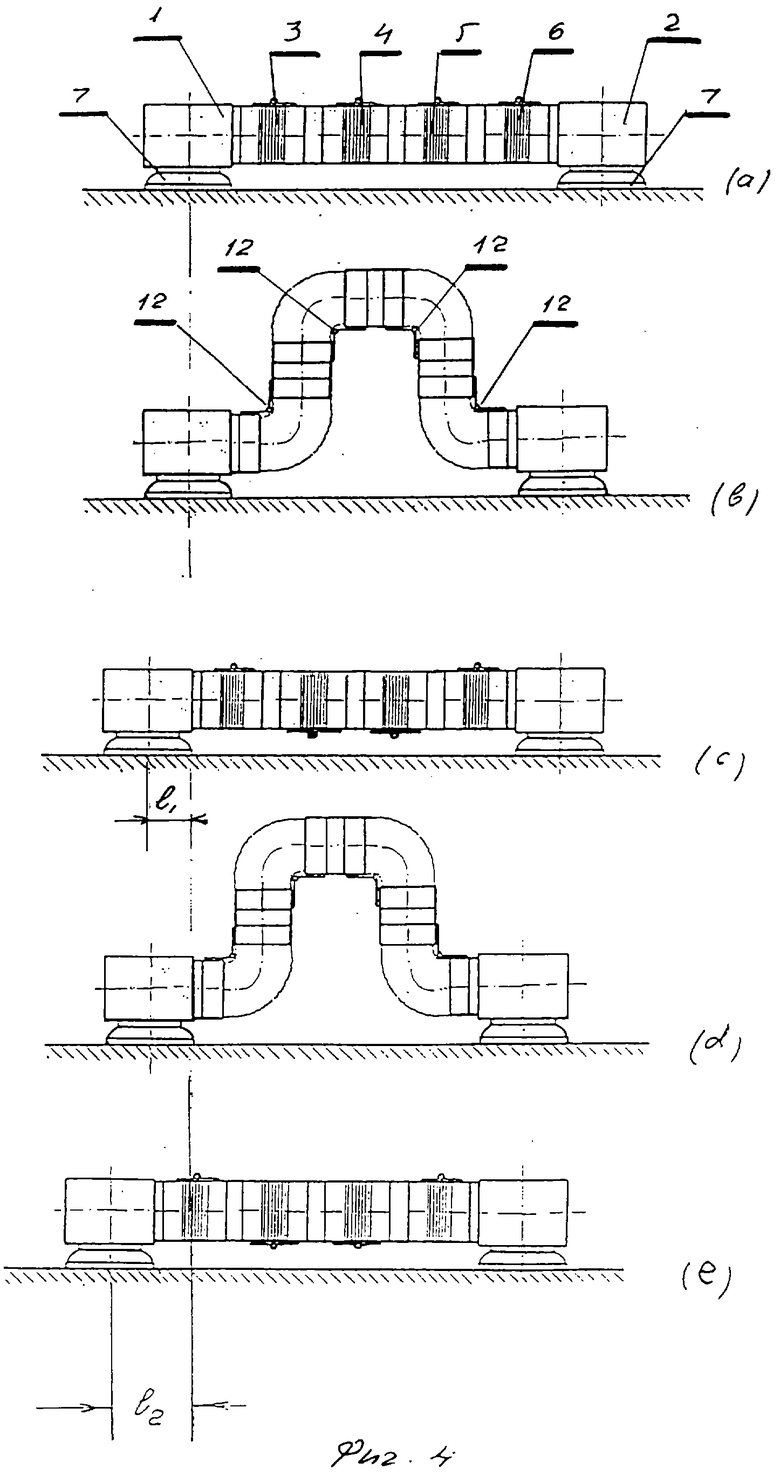
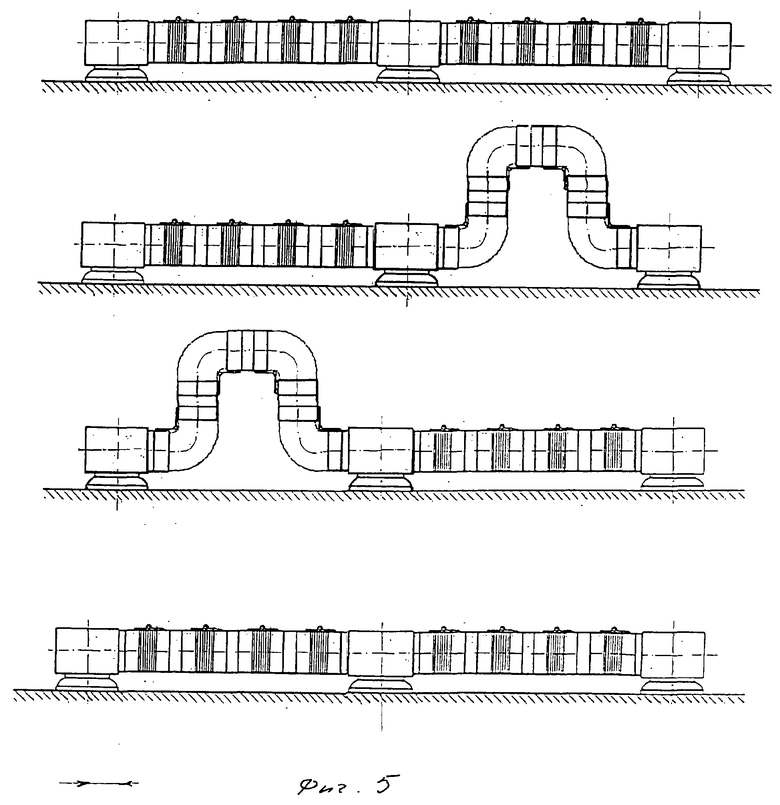
На Фиг.2 (а, b, с) схематично показана последовательность положений ТС при переходе с горизонтальной поверхности на вертикальную. При этом сильфоны изгибаются на 90°. На Фиг.3 (а, b, с, d) схематично показан переход ТС с горизонтальной поверхности (пол) на другую горизонтальную поверхность (потолок) - (а, b); показаны, например, два способа перехода; (с), (d) - переход, например, через забор и карниз. На Фиг.4 схематично показана последовательность передвижения ТС с четырьмя сильфонами по горизонтальной поверхности. На Фиг.5 схематично показана последовательность передвижения ТС, например, с тремя вакуумными захватами и восемью сильфонами.
Транспортное средство содержит две, как минимум, платформы 1, 2, которые соединены газовыми сильфонами 3, 4, 5, 6, соединенными с термосорбционными газовыми аппаратами (конструкция аппарата и его соединение с сильфоном не показаны, т.к. возможно несколько технических и конструкторских решений); каждая из платформ снабжена вакуумным захватом 7, соединенным с источником вакуума (например, вентиляторы или вакуумные насосы). Газовые сильфоны 3, 6 с платформами 1, 2 соединены с помощью поворотных (на 360°) устройств 8, 9 соответственно. Газовые сильфоны 3, 4, 5, 6 также соединены между собой поворотными (на 360°) устройствами 10. Конструкция поворотных устройств не приводится, т.к. все ее возможные, рациональные варианты известны - зубчатые колеса, электродвигатель, редуктор. С поворотными устройствами газовые сильфоны соединены посредством соединительных элементов 11. В одном из соединительных элементов каждого сильфона крепится термосорбционный газовый аппарат, имеющий выход в полость газового сильфона. Газовые сильфоны в разрезе имеют квадратное сечение, т.к. именно такая форма позволяет надежно "связать" верхнюю его грань продолговатым (по ширине грани) шарниром 12, что обеспечивает изгиб газового сильфона на углы от 0° до 90° при наполнении его водородом под давлением.
Предлагаемое ТС при реализации его функций может быть снабжено различными датчиками, видеосистемами, манипуляторами, различными рабочими блоками, узлами и т.д., которые в заявке не рассматриваются, т.к. не имеют отношения к сущности изобретения.
Устройство функционирует следующим образом - на примере Фиг.4. Чтобы передвинуться справа налево (например, по горизонтальной поверхности) первоначально ТС вакуумным захватом 7 платформы 1 соединяется с поверхностью передвижения. Затем соответствующим образом разворачиваются на 180° сильфоны 4, 5, чтобы шарниры 12 заняли положение, изображенное на Фиг.4(b); после этого в сильфоны 3, 4, 5, 6 подается под соответствующим давлением водород, чтобы они изогнулись, например, на 90°. После того как ТС займет положение Фиг.4(b), с поверхностью передвижения с помощью вакуумного захвата 7 соединяется платформа 1, а вакуумный захват 7 платформы 1 освобождается от поверхности передвижения.
Из сильфонов 3, 4, 5, 6 водород убирается в термосорбционные газовые аппараты, и под воздействием упругих сил сильфонов (особенности конструкции) ТС занимает положение Фиг.4(с), т.е. ТС передвигается на величину l1. Далее процесс повторяется, и ТС занимает положение Фиг.4(е), т.е. передвигается на величину l2.
Таким образом, предлагаемое ТС сочетает в себе простоту конструкции, новейшую технологию, высокую маневренность.
Наиболее близким к заявляемому ТС по своей технической сущности является известное ТС для перемещения по произвольно ориентированным в пространстве поверхностям - Свидетельство на полезную модель РФ №32080 (В 62 D 57/032). Оно состоит из двух вакуумных захватных устройств, соединенных между собой цепочкой звеньев, которые между собой связаны поворотными узлами на основе электродвигателей с редукторами. Вакуумные захватные устройства оборудованы поворотными на 360° узлами, через которые оба вакуумных захватных устройства связаны между собой цепочкой звеньев. Данное ТС высокомобильно. Однако недостаточным является то, что все узлы, обеспечивающие развороты и повороты, выполнены на основе электродвигателей, редукторов и зубчатых колес, колец. Это усложняет и значительно утяжеляет ТС, а также требует источники электроэнергии значительной мощности, т.е. ТС практически не может быть автономным.
Заявляемое ТС направлено на обеспечение надежности маневрирования за счет значительного снижения веса, на использование перспективных технологий, что упрощает конструкцию, на обеспечение возможности плоскостного перемещения с ограниченными габаритами проходов, просветов.
Указанный результат достигается тем, что предлагаемая конструкция позволяет отказаться от традиционных узлов поворота, разворота (электродвигатели, редукторы, зубчатые колеса, кольца и др.), а использовать новые технологии, применив сильфоны, заполняемые газом (водородом) от термосорбционных газовых аппаратов, а также обеспечить автономность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 2003 |
|
RU2260543C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В РАЗНОГО РОДА ГРУНТАХ "ЧЕРВЯК" | 2003 |
|
RU2260542C2 |
| ЛИНЕЙНЫЙ ПРИВОД | 2011 |
|
RU2499163C2 |
| МОРСКОЙ АВТОНОМНЫЙ КОМПЛЕКС (МАК) | 2003 |
|
RU2268840C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1996 |
|
RU2092369C1 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ И СПОСОБ С ИСПОЛЬЗОВАНИЕМ ДЕЛИТЕЛЬНО-ПОВОРОТНОГО СТОЛА ДЛЯ АВТОМОБИЛЬНЫХ И ХИМИЧЕСКИХ КАТАЛИЗАТОРОВ НА МОНОЛИТНОЙ ОСНОВЕ | 2009 |
|
RU2508168C2 |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| Устройство для передвижения по гладкой плоской поверхности,произвольно ориентированной в пространстве | 1982 |
|
SU1109331A1 |
| АППАРАТ ДЛЯ ПРИГОТОВЛЕНИЯ СТЕРИЛЬНЫХ МАЗЕЙ | 2000 |
|
RU2183952C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2231463C2 |
Изобретение относится к машиностроению и может быть использовано при автоматизации работ в труднодоступных местах и зонах с повышенной опасностью. Транспортное средство для перемещения по произвольно ориентированным в пространстве поверхностям содержит звенья с поворотными узлами, соединенные с платформами, имеющими вакуумные захваты для фиксации на поверхности передвижения, а также как минимум две платформы с независимыми друг от друга вакуумными захватами, соединенные между собой четырьмя звеньями, закрепленными между собой и на стороне платформы, перпендикулярной поверхности передвижения, через поворотные узлы. Каждое из указанных звеньев выполнено в виде сильфона, имеющего квадратное сечение и изгибающегося на угол от 0 до 90 градусов под воздействием газа (водорода), поступающего под давлением из термосорбционного газового аппарата. Технический результат - повышение маневренности и устойчивости при передвижении по произвольно ориентированным в пространстве поверхностям. 5 ил.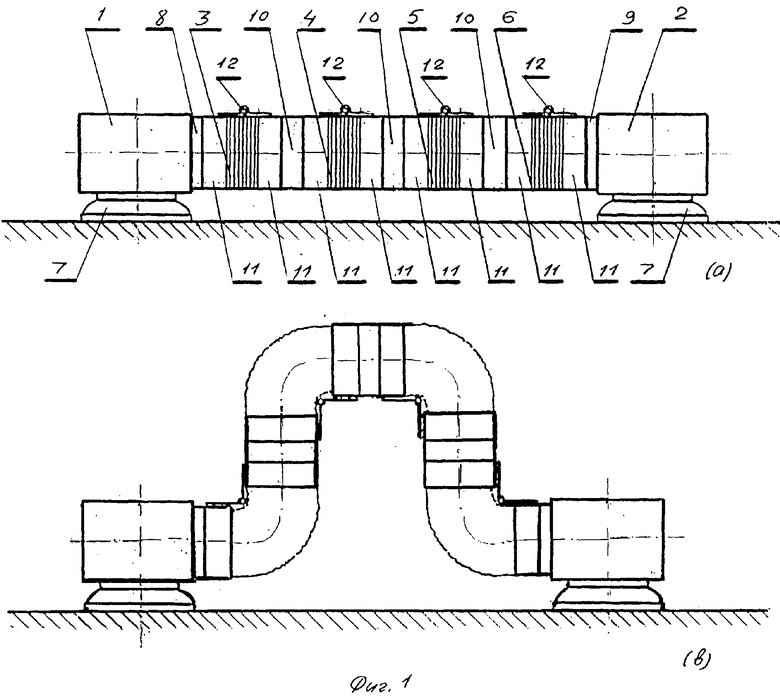
Транспортное средство для перемещения по произвольно ориентированным в пространстве поверхностям, содержащее звенья с поворотными узлами, соединенные с платформами, имеющими вакуумные захваты для фиксации на поверхности передвижения, отличающееся тем, что содержит как минимум две платформы с независимыми друг от друга вакуумными захватами, соединенные между собой четырьмя звеньями, закрепленными между собой и на стороне платформы, перпендикулярной поверхности передвижения, через поворотные узлы, при этом каждое из указанных звеньев выполнено в виде сильфона, имеющего квадратное сечение и изгибающегося на угол от 0 до 90° под воздействием газа (водорода), поступающего под давлением из термосорбционного газового аппарата.
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2000 |
|
RU2175945C1 |
| Способ передвижения гибкого тела поОпОРНОй пОВЕРХНОСТи | 1976 |
|
SU821281A1 |
| Шагающее транспортное средство | 1975 |
|
SU734055A1 |
| УЗЕЛ ДЛЯ РАЗРЕЗАНИЯ И ОЧИСТКИ ОТ СОДЕРЖИМОГО МЫШЕЧНЫХ ЖЕЛУДКОВ ПТИЦЫ | 2005 |
|
RU2295865C1 |
| ГИДРОЦИЛИНДР | 0 |
|
SU305299A1 |

