Изобретение относится к конвейерному транспорту и может быть использовано во всех отраслях промышленности, эксплуатирующих наклонные ленточные конвейеры.
Известно устройство для улавливания ленты наклонных конвейеров в случае ее обрыва (авт. св. N 388977, кл. B 65 G 43/06, 1973), включающее установленный под лентой силовой пневмоцилиндр с захватом, выполненным в виде планки желобчатой формы с пневмоприсосками на рабочей поверхности, сообщенными с вакуум-насосом, включающимся при срабатывании датчика обрыва ленты (сигнального ролика с золотниковым распределителем). Улавливание ленты осуществляется при фрикционном взаимодействии захвата устройства с оборвавшейся лентой вследствие создания вакуума в пневмоприсосках.
Недостатком такого устройства (вакуум-ловителя) является создание вакуума в пневмоприсосках без предварительного прижатия исполнительного органа к ленте, что вызывает повышенные натекания воздуха в систему и усложняет возможность создания вакуума необходимой величины.
Необходимость вакуум-насоса для каждого из ловителей, которые располагаются с небольшим интервалом по длине конвейера, усложняет конструкцию последнего. В совокупности все это снижает надежность работы устройства для улавливания ленты.
Известно также устройство для улавливания ленты наклонных конвейеров (авт. св. N 1102738, кл. B 65 G, 43/06, 1984) наиболее близкое по техническому решению, по технической сущности и достигаемому результату заявляемому объекту изобретения.
От указанного выше устройства по авт.св. N 388977 оно отличается тем, что исполнительный орган устройства (желобчатый захват), расположенный в промежутке между роликоопорами, выполнен из шарнирно соединенных и подпружиненных горизонтальной и боковых секций, при этом боковые секции установлены под углом, большим угла наклона боковых участков ленты конвейера.
Однако, указанные отличия не устраняют недостатки устройства по авт.св. N 388977, и поэтому это устройство также не обладает достаточной надежностью.
Цель заявляемого объекта изобретения повышение надежности работы вакуума ловителя. Поставленная цель достигается тем, что исполнительный орган вакуум-ловителя, расположенный под лентой конвейера в промежутке между роликоопорами, выполнен в виде желоба длиной меньше расстояния между роликоопорами с поперечным сечением, повторяющим поперечное сечение грузонесущей ленты, поверхность которого, обращенная к ленте, футерована слоем эластометра с повышенными фрикционными свойствами и имеет выполненную в нем замкнутую систему каналов в виде глухих пазов, сообщенных с внутренними полостями жестко связанных с исполнительным органом ловителя трубчатых поршневых штоков, установленных на рамке конвейера перпендикулярно исполнительному органу ловителя, а в стенках трубчатых штоков выполнены перпендикулярно их продольной оси сквозные отверстия, перекрытые с внешней стороны штоков сплошным телом их направляющих втулок, также снабженных в стенках сквозными отверстиями, расположенными выше отверстий в стенках штоков и сообщенных с надпоршневыми полостями цилиндров, которые в свою очередь, сообщены с камерой пониженного давления воздуха, выполненной в виде ваккум-баллона, имеющего запорный кран, кинематически связанный с шарнирно-рычажным механизмом датчика провисания ленты конвейера, при этом полости цилиндров, расположенные под поршнями, сообщены с атмосферой.
Преимущества предлагаемого вакуум-ловителя заключаются в том, что его конструкция обеспечивает предварительное прижатие исполнительного органа вакуум-ловителя к ленте сразу же после срабатывания датчика провисания ленты с последующим мгновенным созданием вакуума в каналах исполнительного органа. Это сокращает время, необходимое для проведения в действие ловителя и уменьшает натекание воздуха в вакуумную систему ловителя. Наличие автономного источника создания вакуума в виде вакуум-баллона исключает необходимость оснащения ловителей вакуум-насосами и ускоряет создание вакуума в поршневых системах и каналах исполнительного органа ловителя.
В совокупности все отмеченные выше преимущества существенно повышают надежность работы ловителя.
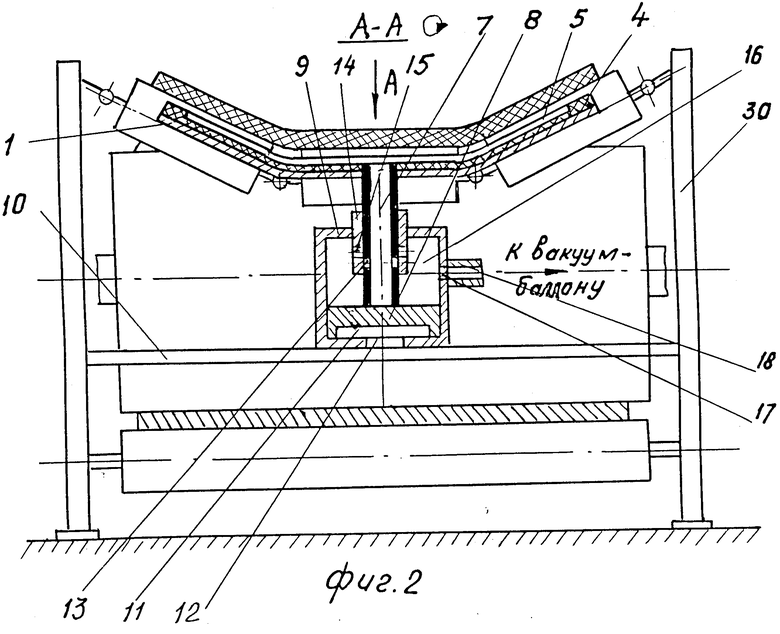
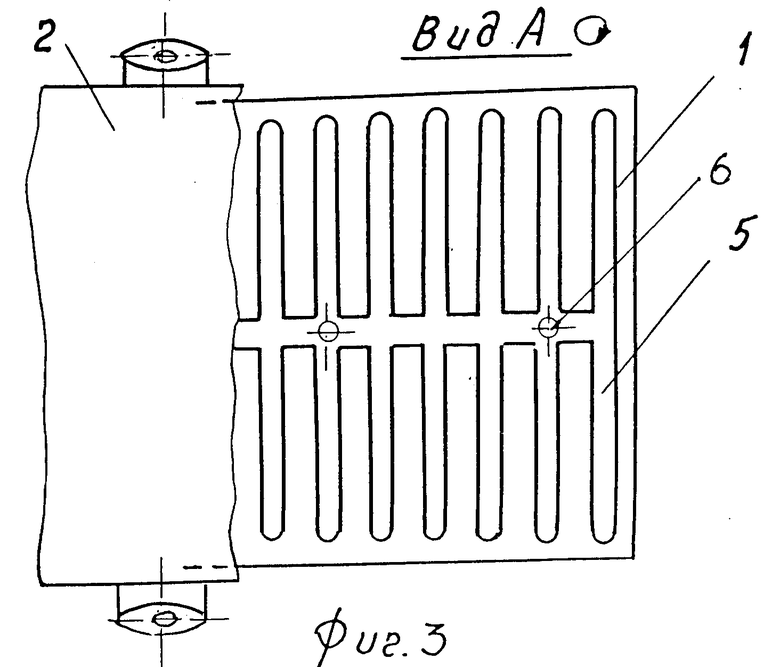
На фиг. 1 изображен общий вид вакуум-ловителя; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 вид А на фиг. 2.
Вакуум-ловитель, установленный в промежутке между роликоопорами конвейера, состоит из расположенного с зазором под конвейерной лентой исполнительного органа в виде желоба 1 длиной меньше расстояния между роликоопорами конвейера с поперечным сечением, повторяющим сечение ленты 2 конвейера, опирающейся на роликоопоры 3. Поверхность желоба 1, обращенная к ленте 2, футерована слоем эластомера 4, например резины с повышенными фрикционными свойствами. В поверхности эластомера 4 выполнена замкнутая система каналов 5 в виде глухих пазов, сообщенных посредством отверстий 6, выполненных в желобе 1, с трубчатыми штоками 7 поршней 8, установленными в цилиндрах 9, расположенных перпендикулярно желобу 1 и закрепленных на раме 10 конвейера. Свободные концы штоков 7 жестко скреплены с желобом 1 ловителя. Поршни 8 опираются на дно цилиндров 9 и имеют в опорной поверхности полости 11, сообщенные посредством отверстия 12 с атмосферой. В стенках трубчатых штоков 7 выполнены отверстия 13, перекрытые в их исходном положении телом направляющих втулок 14, в которых также выполнены отверстия 15. Ось отверстий 15 расположена выше оси отверстий 13 штоков 7, при этом расстояние между осями этих отверстий равно зазору между поверхностью исполнительного органа ловителя и поверхностью ленты конвейера. С внутренней стороны втулок 14 отверстия 15 перекрыты телом трубчатых штоков 7, а с внешней сообщены с полостью 16 цилиндра 9, которая посредством отверстия 17, трубопроводов 18, 19 и 20 сообщена, в свою очередь, с вауум-баллоном 21. В трубопроводе 20 смонтирован запорный кран 22, например пробкового типа, рабочий элемент 23 которого кинематически связан с шарнирно-рычажным механизмом датчика 24 провисания ленты. Шарнирно-рычажный механизм состоит из рычага 25, шарнирно связанного с рычагом 26, опирающимся на опору качания 27. Пружина 28 фиксирует исходное положение датчика 24 и рабочего элемента 23 запорного крана 28.
Упоры 29, смонтированные на стойках 30 рамы конвейера, фиксируют желоб 1 от смещения в направлении продольной оси конвейера.
Вакуум-ловитель работает следующим образом.
При обрыве ленты 2 наклонного конвейера она провисает между роликоопорами вследствие уменьшения ее натяжения, и воздействует на датчик 24 провисания ленты, шарнирно-рычажный механизм которого открывает запорный кран 28, воздействуя на рабочий элемент 23. Вакуум-баллон 21 оказывается сообщенным с поршневой полостью 16 цилиндров 9, в результате чего в полостях создается вакуум и поршни 8 цилиндров под воздействием атмосферного давления в полостях 11 перемещаются поступательно вверх и через посредство штоков 7 вводят в силовой контакт исполнительный орган ловителя желоб 1 с оборвавшейся частью ленты 2, которая перекрывает своим телом систему каналов 5 желоба 1.
Перемещение поршней со штоками вверх происходит до момента совпадения отверстий 13 штоков 7 с отверстиями 15 направляющих втулок 14, при котором поршневые полости 15 цилиндров 9 с созданным в них вакуумом будут сообщены через посредство внутренних полостей трубчатых штоков 7 с системой каналов 5 в рабочей поверхности желоба 1, в результате чего в них будет создан вакуум. Оборвавшаяся часть ленты окажется прижатой к поверхности исполнительного органа ловителя желоба 1 усилием, равным разности давлений между атмосферным и остаточным под лентой, чем будет предотвращено ее самопроизвольное перемещение в продольном направлении.
Продольное смещение желоба 1 предотвращается упорами 29. Предварительное прижатие рабочего органа ловителя к ленте перед созданием в каналах его рабочей поверхности вакуума уменьшает натекание воздуха в вакуумную систему, что сокращает время срабатывания вакуум-ловителя и требует меньшей быстроты откачки средств создания вакуума. Наличие вакуум-баллона исключает необходимость оснащения каждого ловителя вакуум-насосом, ускоряет создание вакуума в поршневых системах, а конструкция последних обеспечивает введение в действие рабочего органа ловителя без применения специальных механических устройств. Футеровка исполнительного органа ловителя слоем эластомера с повышеными фрикционными свойствами повышает надежность фрикционного взаимодействия исполнительного органа ловителя с лентой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМ-ЛОВИТЕЛЬ КОНВЕЙЕРНОЙ ЛЕНТЫ | 1999 |
|
RU2167095C2 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1997 |
|
RU2130888C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2001 |
|
RU2186716C1 |
| ТЕМПЕРАТУРНОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОБУКСОВКИ ЛЕНТЫ НА ПРИВОДНОМ БАРАБАНЕ КОНВЕЙЕРА | 2002 |
|
RU2209758C1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ЛЕНТЫ В МЕСТЕ ЕЕ ЗАГРУЗКИ | 1992 |
|
RU2038992C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1999 |
|
RU2170696C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2003 |
|
RU2241651C1 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ КОНВЕЙЕРНОЙ ЛЕНТЫ В СЛУЧАЕ ЕЕ ОБРЫВА | 1992 |
|
RU2043284C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2003 |
|
RU2234448C1 |
| КОМБАЙН ДЛЯ ОБРАЗОВАНИЯ ГОРНЫХ ВЫРАБОТОК | 1991 |
|
RU2017970C1 |
Использование: конвейерный транспорт, а также во всех отраслях промышленности, эксплуатирующих наклонные ленточные конвейеры. Сущность изобретения: ваккум-ловитель конвейерной ленты включает исполнительный орган, расположенный с зазором под грузонесущей лентой в промежутке между роликоопорами и выполненный в виде желоба, длиной меньше расстояния между роликоопорами и с поперечным сечением, форма которого повторяет форму поперечного сечения грузонесущей ленты, жестко связанного со штоками цилиндров, установленных на раме конвейера перпендикулярно исполнительному органу ловителя, средство создания вакуума и датчик провисания ленты с шарнирно-рычажным механизмом. Средство создания вакуума выполнено в виде вакуум-баллона. Штоки цилиндров установлены в направляющих втулках и выполнены полыми со сквозными отверстиями в их стенках, оси которых перпендикулярны продольным осям штоков, а в стенках направляющих втулок выполнены сквозные отверстия, расположенные выше отверстий в стенках штоков, сообщенных с надпоршневыми полостями цилиндров, которые сообщены трубопроводами с вакуум-баллоном, рабочий элемент запорного крана которого кинематически связан с шарнирно-рычажным механизмом датчика. Поверхность желоба, обращенная к ленте, футерована слоем эластомера с повышенными фрикционными свойствами и имеет выполненную в нем замкнутую систему каналов в виде глухих пазов, сообщенных с внутренними полостями поршневых штоков цилиндров. 1 з.п. ф-лы, 3 ил.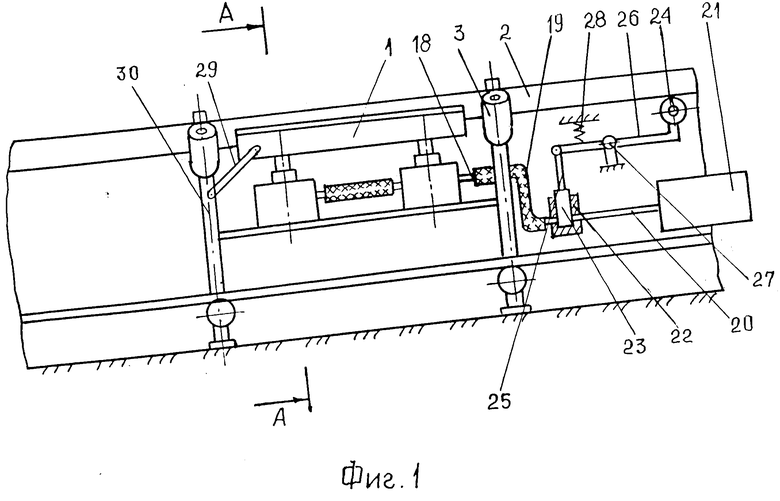
| Устройство для улавливания ленты конвейера | 1983 |
|
SU1102738A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
