Изобретение относится к конвейерному транспорту и может быть использовано во всех отраслях промышленности, эксплуатирующих наклонные ленточные конвейеры.
Известно устройство для улавливания ленты наклонных конвейеров в случае ее обрыва (авт. св. N 388977, кл. В 65 G 43/06, 1973), включающее установленный под лентой силовой пневмоцилиндр с захватом, выполненным в виде планки желобчатой формы с пневмоприсосками на рабочей поверхности, сообщенными с вакуум-насосом, включающимся при срабатывании датчика обрыва ленты (сигнального ролика с золотниковым распределителем). Улавливание ленты осуществляется при фрикционном взаимодействии захвата устройства с оборвавшейся лентой вследствие создания вакуума в пневмоприсосках.
Недостатком такого устройства (вакуум-ловителя) является создание вакуума в пневмоприсосках без предварительного прижатия исполнительного органа к ленте, что вызывает повышенные натекания воздуха в систему и усложняет возможность создания вакуума необходимой величины.
Необходимость вакуум-насоса для каждого из ловителей, которые располагаются с небольшим интервалом по длине конвейера, усложняет конструкцию последнего. В совокупности все это снижает надежность работы устройства для улавливания ленты.
Известен также вакуум-ловитель конвейерной ленты (патент РФ N 2092416, кл. В 65 G 43/06, 1997), наиболее близкий по техническому решению, по технической сущности и достигаемому результату заявляемому объекту изобретения.
От указанного выше устройства по авторскому свидетельству N 388977 он отличается тем, что средство создания вакуума выполнено в виде вакуум-баллона, штоки поршней цилиндров установлены в направляющих втулках и выполнены полыми со сквозными отверстиями в их стенках, оси которых перпендикулярны осям штоков, а в стенках направляющих втулок выполнены сквозные отверстия, расположенные выше отверстий в стенках штоков и сообщенные с надпоршневыми полостями цилиндров, которые сообщены трубопроводами с вакуум-баллоном, рабочий элемент запорного крана которого кинематически связан с шарнирно-рычажным механизмом датчика. Поверхность желоба, обращенная к ленте, футерована слоем эластомера с повышенными фрикционными свойствами и имеет выполненную в нем замкнутую систему каналов в виде глухих пазов, сообщенных с внутренними полостями поршневых штоков цилиндров. Полости цилиндров, расположенные под поршнями, сообщены с атмосферой, а расстояния между осями отверстий направляющих втулок и штоков равно зазору между поверхностью исполнительного органа вакуум-ловителя и поверхностью ленты конвейера. Однако указанные отличия не устраняют возможности натекания воздуха в каналы рабочей поверхности исполнительного органа ловителя после его срабатывания в результате обрыва конвейерной ленты, что может вызвать опускание исполнительного органа ловителя с выходом из силового контакта с конвейерной лентой в результате уменьшения вакуума в подпоршневой полости цилиндров. Все это снижает надежность ловителя.
Задачей заявляемого объекта изобретения является повышение надежности работы вакуум-ловителя. Решение задачи достигается тем, что вакуум-ловитель конвейерной ленты, включающий средство создания вакуума в виде вакуум-баллона, исполнительный орган, расположенный с зазором под грузонесущей лентой в промежутке между роликоопорами и выполненный в виде желоба длиной меньше расстояния между роликоопорами, с поперечным сечением, форма которого повторяет форму поперечного сечения грузонесущей ленты, а поверхность желоба, обращенная к ленте, футерована слоем эластомера с повышенными фрикционными свойствами и имеет выполненную в нем замкнутую систему каналов в виде глухих пазов, цилиндры, установленные на раме конвейера перпендикулярно исполнительному органу ловителя и имеющие жестко связанные с его исполнительным органом полые штоки, установленные в направляющих втулках, в стенках которых выполнены сквозные отверстия, расположенные выше отверстий в стенках штоков и сообщенные с надпоршневыми полостями цилиндров, сообщенных в свою очередь трубопроводом с вакуум-баллоном и через полые штоки с пазами в рабочей поверхности исполнительного органа ловителя, датчик провисания ленты с шарнирно-рычажным механизмом снабжен системой рычажно-колодочных стопорных тормозов, выполненной в виде нескольких пар двуплечих рычагов, смонтированных на опорах качания и расположенных с обеих сторон конвейерной ленты перпендикулярно ее продольной оси, на концах коротких плеч которых, обращенных к ленте, закреплены шарнирно тормозные колодки, расположенные с зазором над лентой по ее краям на участке взаимодействия ленты с исполнительным органом ловителя, а длинные плечи рычагов находятся в силовом взаимодействии с установленными под ними пружинами растяжения, сжатыми усилием натянутых канатов, одни концы которых закреплены на концах длинных плеч рычагов, а вторые снабжены кольцами, одетыми с возможностью их съема, на свободные концы нижних штоков цилиндров, закрепленных в поршнях со стороны подпоршневого пространства. При этом исполнительный орган ловителя шарнирно связан с телескопическими опорными стойками, шарнирно закрепленными на раме конвейера и снабженными устройствами для автоматического фиксирования их длины, выполненными в виде втулок, жестко скрепленных с нижней частью опорных стоек и вставленных в них с возможностью продольного перемещения цилиндрических стержней с реечной нарезкой зубьев на одной из их сторон и скрепленных с верхней частью телескопических опорных стоек, при этом втулки нижней части опорных стоек снабжены фиксаторами взаимного расположения втулок и стержней, находящихся в зацеплении с реечными зубьями стержней верхних частей опорных стоек и в силовом взаимодействии с пружинами, закрепленными на внешней поверхности втулок нижней части опорных стоек.
На нижней поверхности опорной рамы цилиндров ловителя, соосно нижним штокам цилиндров, установлены дистанционные втулки положения колец канатов, одетых на нижние штоки цилиндров, при этом внутренний диаметр втулок больше диаметров нижних штоков.
Преимущества предлагаемого вакуум-ловителя заключаются в том, что его конструкция обеспечивает фиксированное положение исполнительного органа ловителя после его срабатывания, не зависящее от снижения вакуума в вакуумной системе ловителя вследствие возможного натекания в нее воздуха и удержание оборвавшейся части конвейерной ленты в заторможенном положение автоматически срабатывающей системой механических тормозов. В совокупности все отмеченные выше преимущества существенно повышают надежность работы ловителя.
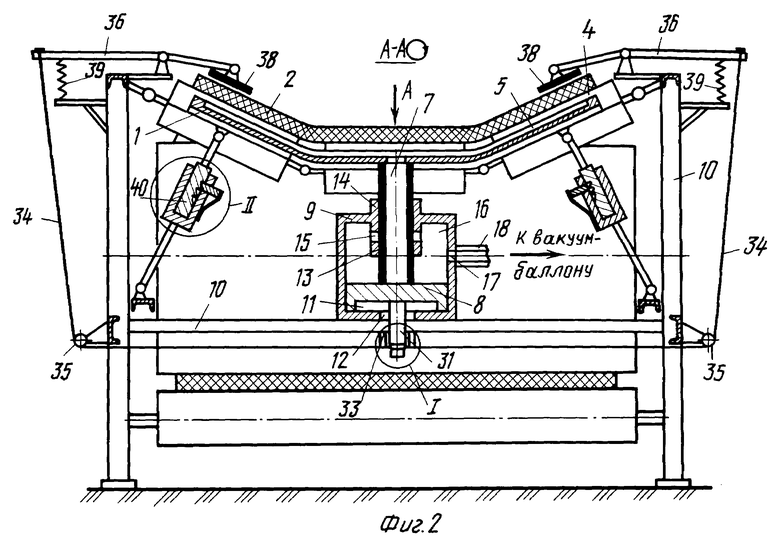
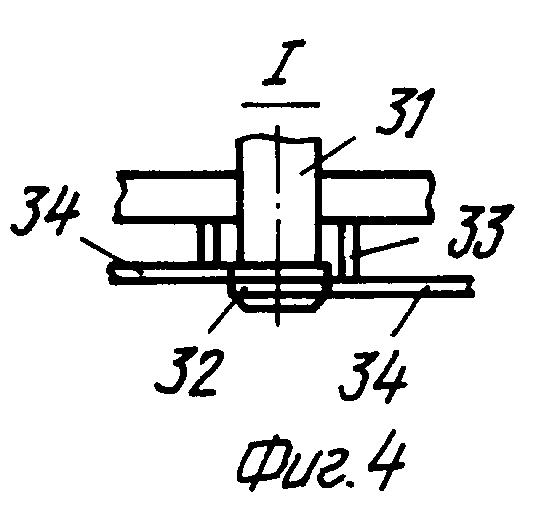
Вакуум-ловитель поясняется чертежами, где на фиг. 1 изображен общий вид вакуум-ловителя, на фиг. 2 - разрез А-А на фиг. 1, на фиг. 3 - вид А на фиг. 2, на фиг. 4 - узел сопряжения канатов с обратным штоком цилиндров, на фиг. 5 - фиксирующее устройство длины опорных стоек.
Вакуум-ловитель, установленный в промежутке между роликоопорами конвейера, состоит из расположенного с зазором под конвейерной лентой исполнительного органа в виде желоба 1 длиной меньше расстояния между роликоопорами конвейера с поперечным сечением, повторяющим сечение ленты 2 конвейера, опирающейся на роликоопоры 3. Поверхность желоба 1, обращенная к ленте 2, футерована слоем эластомера 4, например резины с повышенными фрикционными свойствами. В поверхности эластомера 4 выполнена замкнутая система каналов 5 в виде глухих пазов, сообщенных посредством отверстий 6, выполненных в желобе 1, с полыми штоками 7 поршней 8, установленными в цилиндрах 9, расположенных перпендикулярно желобу 1 и закрепленных на раме 10 конвейера. Свободные концы штоков 7 жестко скреплены с желобом 1 ловителя. Поршни 8 опираются на дно цилиндров 9 и имеют в опорной поверхности полости 11, сообщенные посредством отверстия 12 с атмосферой. В стенках полых штоков 7 выполнены отверстия 13, перекрытые в их исходном положении телом направляющих втулок 14, в которых также выполнены отверстия 15. Оси отверстий 15 расположены выше оси отверстий 13 штоков 7, при этом расстояние между осями этих отверстий равно зазору между поверхностью исполнительного органа ловителя и поверхностью ленты конвейера. С внутренней стороны втулок 14 отверстия 15 перекрыты телом полых штоков 7, а с внешней сообщены с полостью 16 цилиндра 9, которая посредством отверстия 17, трубопроводов 18, 19 и 20 сообщена, в свою очередь, с вакуум- баллоном 21. В трубопроводе 20 смонтирован запорный кран 22, например пробкового типа, рабочий элемент 23 которого кинематически связан с шарнирно-рычажным механизмом датчика 24 провисания ленты. Шарнирно-рычажный механизм состоит из рычага 25, шарнирно связанного с рычагом 26, опирающимся на опору качания 27. Пружина 28 фиксирует исходное положение датчика 24 и рабочего элемента 23 запорного крана 22. Упоры 29, смонтированные на стойках 30 рамы конвейера, фиксируют желоб 1 от смещения в направление продольной оси конвейера. В поршнях 8 со стороны подпоршневого пространства закреплены нижние штоки 31, на свободные концы которых одеты с возможностью их съема кольца 32 на расстоянии от концов штоков, равным зазору между исполнительным органом ловителя и лентой. Это расстояние устанавливается высотой дистанционных втулок 33, закрепленных на раме конвейера, внутри которых перемещаются штоки 31. Кольца 32 закреплены на концах канатов 34, которые огибают отклоняющие блоки 35 и своим вторым концом закреплены на концах длинных плеч двуплечих рычагов 36, опирающихся на опору качания 37, и находятся с ними в силовом взаимодействии. На концах коротких плеч рычагов 36 закреплены тормозные колодки 38 с зазором относительно конвейерной ленты 2. Величина зазора обеспечивается и регулируется силовым воздействием канатов 34 на длинные плечи рычагов 36 и расположенные под ними пружины 39, находящиеся в результате этого в сжатом состоянии. Желоб 1 исполнительного органа ловителя шарнирно связан с телескопическими раздвижными опорными стойками 40, шарнирно закрепленными на раме 10 конвейера.
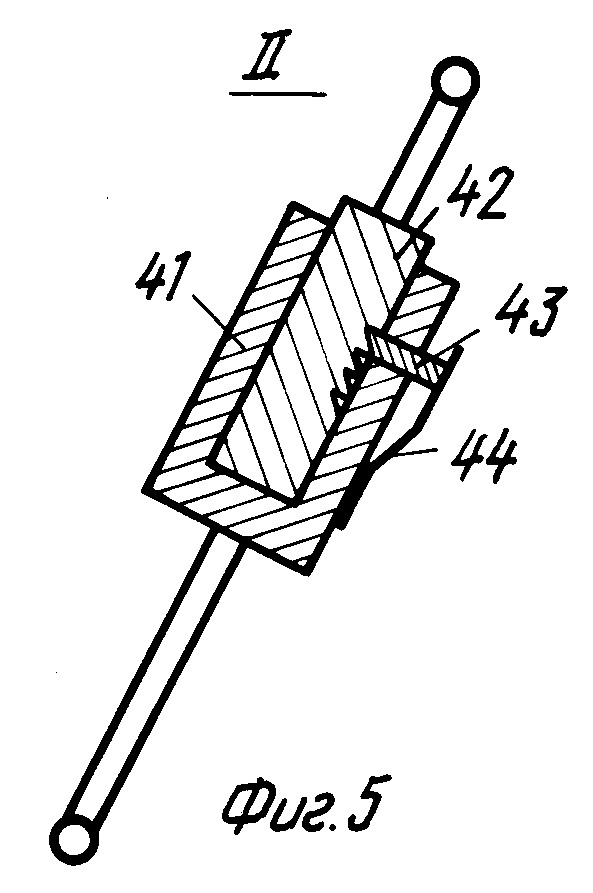
Для автоматического фиксирования измененной длины опорных стоек 40 они снабжены устройствами, состоящими из втулок 41, жестко скрепленных с нижними частями опорных стоек 40 и вставленных в них, с возможностью продольного перемещения, цилиндрических стержней 42 с реечной нарезкой зубьев на одной из их сторон и скрепленных с верхней частью опорных стоек 40. В зацеплении с реечными зубьями находятся фиксаторы 43 взаимного расположения втулок 41 и стержней 42, находящиеся в силовом взаимодействии с пружинами 44.
Вакуум-ловитель работает следующим образом.
При обрыве ленты 2 наклонного конвейера она провисает между роликоопорами вследствие уменьшения ее натяжения и воздействует на датчик 24 провисания ленты, шарнирно-рычажный механизм которого открывает запорный кран 28, воздействуя на рабочий элемент 23. Вакуум-баллон 21 оказывается сообщенным с поршневой полостью 16 цилиндров 9, в результате чего в полостях создается вакуум и поршни 8 цилиндров под воздействием атмосферного давления в полостях 11 перемещаются поступательно вверх и через посредство штоков 7 вводят в силовой контакт исполнительный орган ловителя - желоб 1 с оборвавшейся частью ленты 2, которая перекрывает своим телом систему каналов 5 желоба 1.
Перемещение поршней со штоками вверх происходит до момента совпадения отверстий 13 штоков 7 с отверстиями 15 направляющих втулок 14, при котором поршневые полости 15 цилиндров 9 с созданным в них вакуумом будут сообщены через посредство внутренних полостей полых штоков 7 с системой каналов 5 в рабочей поверхности желоба 1, в результате чего в них будет создан вакуум. Оборвавшаяся часть ленты окажется прижатой к поверхности исполнительного органа ловителя желоба 1 усилием, равным разности давлений между атмосферным и остаточным под лентой, чем будет предотвращено ее самопроизвольное перемещение в продольном направлении.
Продольное смещение желоба 1 предотвращается упорами 29.
Перемещение исполнительного органа ловителя желоба 1 вверх вызовет удлинение телескопических опорных стоек 40 и в момент вхождения желоба 1 в силовой контакт с лентой 2 их конечная длина автоматически фиксируется фиксатором 43 и желоб 1 получает жесткую опору на стойку 40. Одновременно с перемещением поршней 8 вверх произойдет перемещение в том же направлении штоков 31 при фиксированном, благодаря дистанционным втулкам 33, положении колец 32. В момент вхождения желоба 1 в силовой контакт с лентой 2 кольца 32 канатов 34 освобождаются от силового контакта со штоками 31. Благодаря этому исчезает натяжение канатов 34 и пружины 38, освобождающиеся от сжимающего их усилия канатов, распрямляются, поворачивая рычаги 36 относительно опоры качания 37 до момента вхождения тормозных колодок в силовой контакт с конвейерной лентой. Края ленты защемляются между тормозными колодками 38 и желобом 1, чем обеспечивается надежное фиксированное положение заторможенной части конвейерной ленты. Телескопические стойки 40 с автоматическими фиксаторами их длины обеспечивают жесткую опору на них желоба 1 исполнительного органа ловителя, после вхождения его в силовой контакт с конвейерной лентой, не позволяя ему опуститься в случае уменьшения вакуума в каналах вакуумной системы ловителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМ-ЛОВИТЕЛЬ КОНВЕЙЕРНОЙ ЛЕНТЫ | 1993 |
|
RU2092416C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1997 |
|
RU2130888C1 |
| ДИСКОВО-КОЛОДОЧНЫЙ ТОРМОЗ ДЛЯ ЛЕНТОЧНОГО КОНВЕЙЕРА | 1999 |
|
RU2167096C1 |
| ТЕМПЕРАТУРНОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОБУКСОВКИ ЛЕНТЫ НА ПРИВОДНОМ БАРАБАНЕ КОНВЕЙЕРА | 2002 |
|
RU2209758C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2003 |
|
RU2241651C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2000 |
|
RU2168451C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1999 |
|
RU2159205C1 |
| ОПОРА СКОЛЬЖЕНИЯ ДЛЯ ХОЛОСТОЙ ВЕТВИ ЛЕНТЫ КОНВЕЙЕРА | 2000 |
|
RU2167091C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2000 |
|
RU2170695C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2003 |
|
RU2234448C1 |

Изобретение относится к конвейерному транспорту и может быть использовано во всех отраслях промышленности, эксплуатирующих наклонные ленточные конвейеры. Вакуум-ловитель конвейерной ленты включает средство создания вакуума в виде вакуум-баллона, исполнительный орган, расположенный с зазором под грузонесущей лентой в промежутке между роликоопорами и выполненный в виде желоба длиной меньше расстояния между роликоопорами, с поперечным сечением, форма которого повторяет форму поперечного сечения грузонесущей ленты, а поверхность желоба, обращенная к ленте, футерована слоем эластомера с повышенными фрикционными свойствами и имеет выполненную в нем замкнутую систему каналов в виде глухих пазов, цилиндры, установленные на раме конвейера перпендикулярно исполнительному органу ловителя и имеющие жестко связанные с его исполнительным органом полые штоки, установленные в направляющих втулках, в стенках которых выполнены сквозные отверстия, расположенные выше отверстий в стенках штоков и сообщенные с надпоршневыми полостями цилиндров, сообщенных трубопроводом с вакуум-баллоном и через полые штоки с пазами в рабочей поверхности исполнительного органа ловителя, датчик провисания ленты с шарнирно-рычажным механизмом. Вакуум-ловитель снабжен системой рычажно-колодочных стопорных тормозов, выполненной в виде нескольких пар двуплечих рычагов, смонтированных на опорах качания и расположенных с обеих сторон конвейерной ленты перпендикулярно ее продольной оси, на концах коротких плеч которых, обращенных к ленте, закреплены шарнирно тормозные колодки, расположенные с зазором над лентой по ее краям на участке взаимодействия ленты с исполнительным органом ловителя, а длинные плечи рычагов находятся в силовом взаимодействии с установленными под ними пружинами растяжения, сжатыми усилием натянутых канатов, одни концы которых закреплены на концах длинных плеч рычагов, а вторые снабжены кольцами, надетыми с возможностью их съема на свободные концы штоков цилиндров, закрепленных в поршнях со стороны подпоршневого пространства. Исполнительный орган ловителя шарнирно связан с телескопическими опорными стойками, шарнирно закрепленными на раме конвейера и снабженными устройствами для автоматического фиксирования их длины. Повышается надежность работы ловителя. 2 з.п. ф-лы, 5 ил.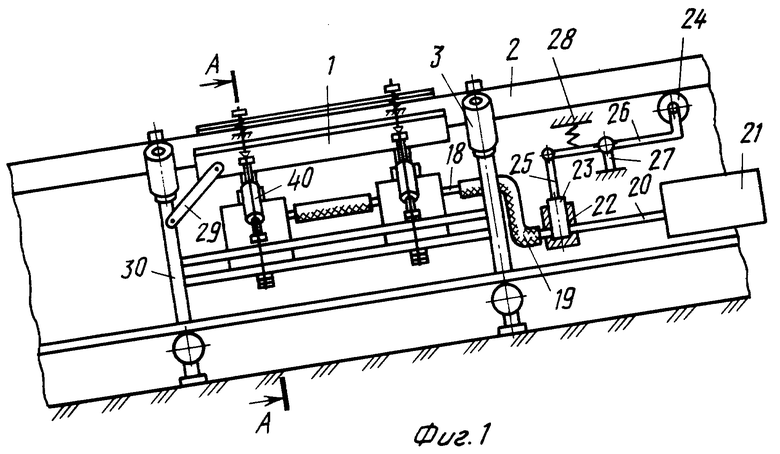
| ВАКУУМ-ЛОВИТЕЛЬ КОНВЕЙЕРНОЙ ЛЕНТЫ | 1993 |
|
RU2092416C1 |
| Устройство для улавливания ленты в случае ее обрыва | 1975 |
|
SU558825A1 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ЛЕНТЫ ЛЕНТОЧНОГО КОНВЕЙЕРА | 0 |
|
SU388977A1 |
| 0 |
|
SU154816A1 | |
| Устройство для улавливания ленты конвейера | 1983 |
|
SU1102738A1 |
| ГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД ДЛЯ ТРАНСПОРТНОЙ МАШИНЫ С ШАРНИРНО СОЧЛЕНЕННОЙ РАМОЙ | 0 |
|
SU190225A1 |
