Изобретение относится к устройствам для погрузки и разгрузки крытых транспортных средств, например, для погрузки и разгрузки тяжелых и громоздких грузов из крытых железнодорожных вагонов или крупнотоннажных контейнеров.
Известно устройство для загрузки и разгрузки транспортных средств, преимущественно крытых, содержащее загрузочно-разгрузочное колесное транспортное средство, с установленной с возможностью вылета стрелой с грузозахватным органом.
Техническим результатом является сокращение времени проведения погрузочно-разгрузочных работ на автомобильном и железнодорожном транспорте, устранение трудоемких такелажных работ с тяжелыми и громоздкими грузами, а также универсальной погрузочно-разгрузочной машины для крутых транспортных средств, имеющих дверные проемы.
Технический результат достигается тем, что в устройстве для загрузки и разгрузки транспортных средств, преимущественно крытых, содержащем загрузочно-разгрузочное колесное транспортное средство с установленной с возможностью изменения вылета стрелой с грузозахватным органом, в качестве колесного транспортного средства использован грузовой автомобиль, имеющий закрепленную на шасси опорную платформу с направляющими, в которых установлена выдвижная в горизонтальной плоскости консоль-каретка, имеющая на конце поворотный механизм, на вертикальной оси которого жестко закреплена телескопическая стрела, при этом первая секция телескопической стрелы закреплена со смещением относительно ее середины по продольной оси симметрии в сторону свободного конца указанной секции, причем устройство включает в себя систему управления, содержащую блок ввода исходных данных, блок определения траектории движения грузозахватного органа, блок корректировки траектории движения грузозахватного органа, блок ручного управления, датчик касания, установленный на конце стрелы, датчики положения узлов стрелы, установленные на поворотном механизме и секциях стрелы, и формирователи команд управления приводами, входы которых соединены с входами блока корректировки траектории движения грузозахватного органа, первые входы которого подключены к датчику касания и датчикам положения узлов стрелы, а второй и третий входы соединены соответственно с выходами блока ручного управления и блока определения траектории грузозахватного органа, вход которого подключен к выходу блока ввода исходных данных.
На фиг.1 изображен вид предложенного устройства в двух основных проекциях; на фиг.2 система управления приводами предложенного устройства.
Машина для погрузки и разгрузки тяжелых и громоздких грузов из крытых транспортных средств: железнодорожных вагонов, крупнотоннажных контейнеров, изображенная на фиг.1, монтируется на шасси автомобиля 1, на которое устанавливается опорная рама 2, на которую опирается платформа 3 с "П" образными направляющими.
По направляющим скользит консоль-каретка 4 с закрепленным на ее конце поворотным механизмом 5, имеющим индивидуальный привод. На вертикальной оси поворотного механизма 5 со смещением относительно середины по продольной оси симметрии жестко закреплена первая секция телескопической стрелы 6, имеющая на конце грузозахватный орган 7.
Телескопическая стрела 6 выполнена трехсекционной и имеет два привода: привод выдвижения телескопических секций и привод для подъема и опускания груза, которые расположены в одном кожухе 8.
Консоль-каретка 4 приводится в возвратно-поступательное движение гидроцилиндрами 9.
Опорная рама оснащена аутриггерами 10. Третья секция телескопической стрелы с грузозахватным органом на конце оснащена датчиком касания 11, а поворотный узел 5 оснащен датчиком положения 12, определяющим угол поворота стрелы.
Первая и вторая секция стрелы, оснащены соответственно датчиками положения 13 и 14, определяющими вылет секций относительно друг друга.
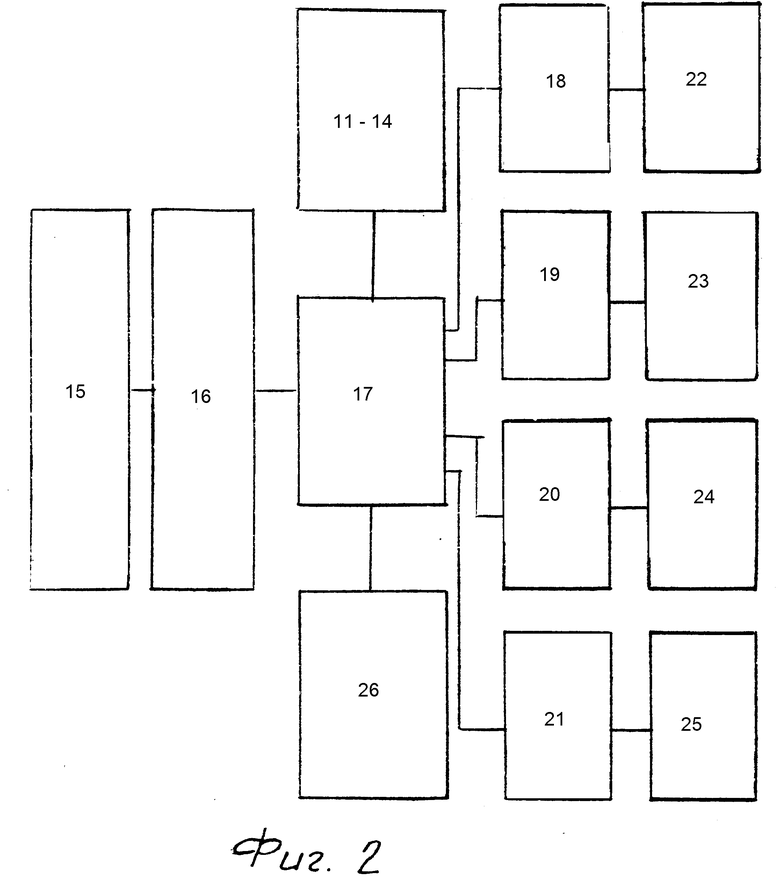
Управление проводами осуществляется через систему управления, содержащую:
блок 15 ввода исходных данных, предназначенный для ввода в систему управления информации о координатах исходного /начального/ положения грузозахватного органа, точки захвата груза и внутренних габаритов транспортного средства для возможности манипулирования;
блок 16 определения траектории движения грузозахватного органа, осуществляющий, на основании исходных данных, полученных из блока задания исходных данных, расчет оптимальной траектории движения конца стрелы с грузозахватным органом на конце;
блок 17 корректировки траектории движения, осуществляющий формирование управляющих сигналов для включения и выключения в требуемой временной последовательности приводов механизмов устройства;
формирователи 18-25 команд управления приводами механизмов, предназначенные для согласования уровней характеристик сигналов блока формирования управляющих сигналов и преобразования управляющих сигналов в команды включения-выключения приводов;
блок 26 ручного управления, необходимый для осуществления возможности управления приводами устройства, непосредственно оператором с переносного пульта.
Устройство работает следующим образом. Оператор вводит в систему управления исходные данные о габаритах и координатах дверного проема и внутреннего пространства транспортного средства и характеристики груза /масса, габарит и т.д./, а затем включает систему автоматического введения телескопической стрелы с грузозахватным органом на конце во внутреннее пространство транспортного средства. Затем производится строповка груза. После поднятия груза, производится автоматическая транспортировка груза из транспортного средства в обратной последовательности.
При включении блока ручного управления, управление приводами осуществляется оператором с переносного пульта управления.
При ручном управлении оператор визуально определяет расстояние для движения консоли-каретки 4 и скорости движения поворотного узла 5, в режиме "совместно", что позволяет оператору задавать оптимальную траекторию движения конца стрелы в зависимости от размеров дверного проема и внутренних габаритов транспортного средства, а также манипулировать концом стрелы с грузозахватным органом на конце внутри транспортного средства, что достигается ручным включением приводов в режиме "совместно" или "индивидуально", в зависимости от производимых погрузо-разгрузочных операций. Управление с ручного пульта кнопочное.
После введения стрелы во внутреннее пространство транспортного средства, производится строповка груза и его поднятие, затем все операции производятся в обратной последовательности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ-РАЗГРУЗКИ КРЫТЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2067074C1 |
| Грузоподъемный кран | 1989 |
|
SU1735198A1 |
| Устройство для загрузки и разгрузки крытых помещений | 1978 |
|
SU779285A1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| ГИДРАВЛИЧЕСКИЙ КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2193518C1 |
| Навесное грузозахватное устройство погрузчика для выгрузки грузов из крытых вагонов | 1980 |
|
SU965926A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ПЕРЕВОЗКИ КОНТЕЙНЕРОВ | 1991 |
|
RU2028220C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
Использование: для загрузки и разгрузки транспортных средств, преимущественно крытых. Сущность изобретения: устройство содержит закрепленную на шасси грузового автомобиля опорную платформу с направляющими, в которых установлена выдвижная консоль-каретка с поворотным механизмом, на оси которого закреплена телескопическая стрела с датчиками положения грузозахватных органов и касания, и систему управления. 2 ил.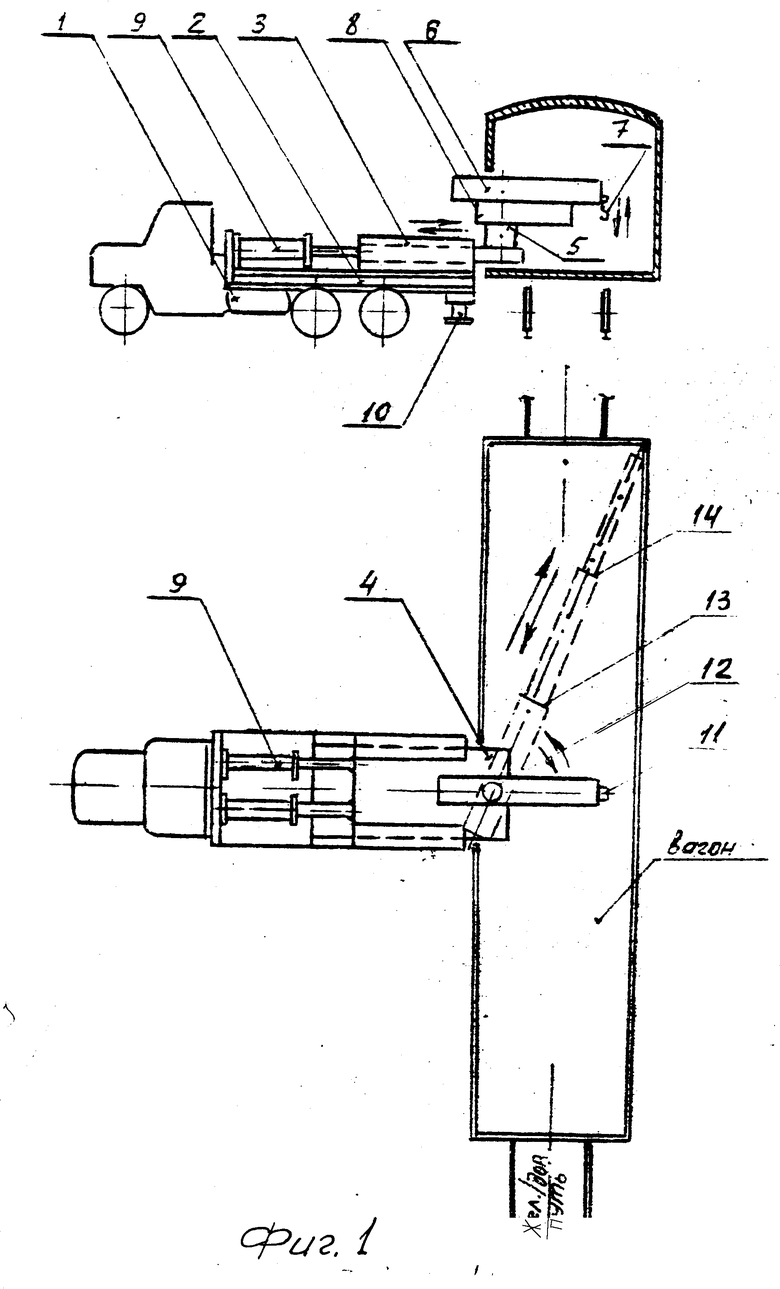
Устройство для загрузки и разгрузки транспортных средств, преимущественно крытых, содержащее загрузочно-разгрузочное колесное транспортное средство с установленной с возможностью изменения вылета стрелой с грузозахватным органом, отличающееся тем, что в качестве колесного транспортного средства использован грузовой автомобиль, имеющий закрепленную на шасси опорную платформу с направляющими, в которых установлена выдвижная в горизонтальной плоскости консоль-каретка, имеющая на конце поворотный механизм, на вертикальной оси которого жестко закреплена телескопическая стрела, при этом первая секция телескопической стрелы закреплена со смещением относительно ее середины по продольной оси симметрии в сторону свободного конца указанной секции, причем устройство включает в себя систему управления, содержащую блок ввода исходных данных, блок определения траектории движения грузозахватного органа, блок корректировки траектории движения грузозахватного органа, блок ручного управления, датчик касания, установленный на конце стрелы, датчики положения узлов стрелы, установленные на поворотном механизме и секциях стрелы, и формирователи команд управления приводами, входы которых соединены с выходами блока корректировки траектории движения грузозахватного органа, первые входы которого подключены к датчику касания и датчиком положения грузов стрелы, а второй и третий входы соединены соответственно с выходами блока ручного управления и блока определения траектории грузозахватного органа, вход которого подключен к выходу блока ввода исходных данных.
| Патент ФРГ N 3301416, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |

