Изобретение относится к транспортным средствам, используемым в технологических процессах перегрузки контейнеров в аэропортах на участке самолет-склад или склад-самолет.
Известно транспортное средство, в котором перемещение груза (багажа) по платформе осуществляется при помощи пластинчатого конвейера поперечного перемещения и пластинчатого конвейера продольного перемещения. Сталкивание груза с пластинчатого конвейера продольного перемещения на пластинчатый конвейер поперечного перемещения производится при помощи толкателя, а сталкивание груза в противоположном направлении осуществляется при помощи дополнительного борта. В момент перемещения груза с одного пластинчатого конвейера на другой один из конвейеров находится в состоянии покоя и перемещение по этому конвейеру производится волоком, что при перегрузке контейнеров большой массы приводит к износу конвейера и днищ контейнеров, а также требует увеличения мощности привода толкателей и дополнительного борта [1].
Разгрузка и погрузка транспортного средства производится при помощи вертикального конвейера с последующей кантовкой груза (багажа) на шарнирно закрепленной площадке.
При перемещении груза по конвейеру в верхнем положении происходит кантование груза, что в случае применения большегрузных контейнеров недопустимо.
Ближайшим по технической сущности является транспортное средство для погрузки, разгрузки и транспортировки пакетированных строительных материалов, содержащее самоходное шасси, смонтированную на нем платформу с роликовой дорожкой, размещенной вдоль оси платформы и портал с грузозахватным органом, поворотно установленным в конце платформы [2].
Размещение портала с грузозахватным органом сзади самоходного шасси не позволяет производить разгрузку и загрузку пакетов спереди платформы, а отсутствие поперечного перемещения пакетов не позволяет использовать закабинное пространство при многорядном расположении груза.
Целью изобретения является повышение эксплуатационных возможностей транспортного средства.
Это достигается тем, что платформа снабжена шариковыми опорами, смонтированными на задней и передней ее частях, а вдоль платформы симметрично ее оси закреплены направляющие, на которых подвижно установлен портал. На поперечине портала установлена каретка с грузозахватным органом. Портал и каретка снабжены автономными приводами для их перемещения, а грузозахватный орган представляет собой двустороннюю стрелу, жестко закрепленную средней частью на каретке. Двусторонняя стрела снабжена гидроупорами и грузозахватными рычагами для перемещения контейнера в продольном направлении, причем грузозахватные рычаги шарнирно закреплены на свободных концах стрелы с возможностью поворота приводом в вертикальной плоскости, а гидроупоры укреплены в средней части стрелы и предназначены для перемещения контейнера в поперечном направлении при взаимодействии штоков гидроупоров с поверхностью контейнера. Кроме того, грузовая платформа снабжена дополнительной платформой с роликовыми опорами, которая одним концом шарнирно закреплена на передней части упомянутой платформы, а другим концом присоединена к раме шасси посредством гидроцилиндров, установленных с возможностью фиксации на дополнительной платформе, устанавливаемой в транспортном положении наклонно.
Для обеспечения единого уровня платформы с полом грузового люка или роликовой рампы грузовая платформа снабжена регулируемыми по высоте опорами.
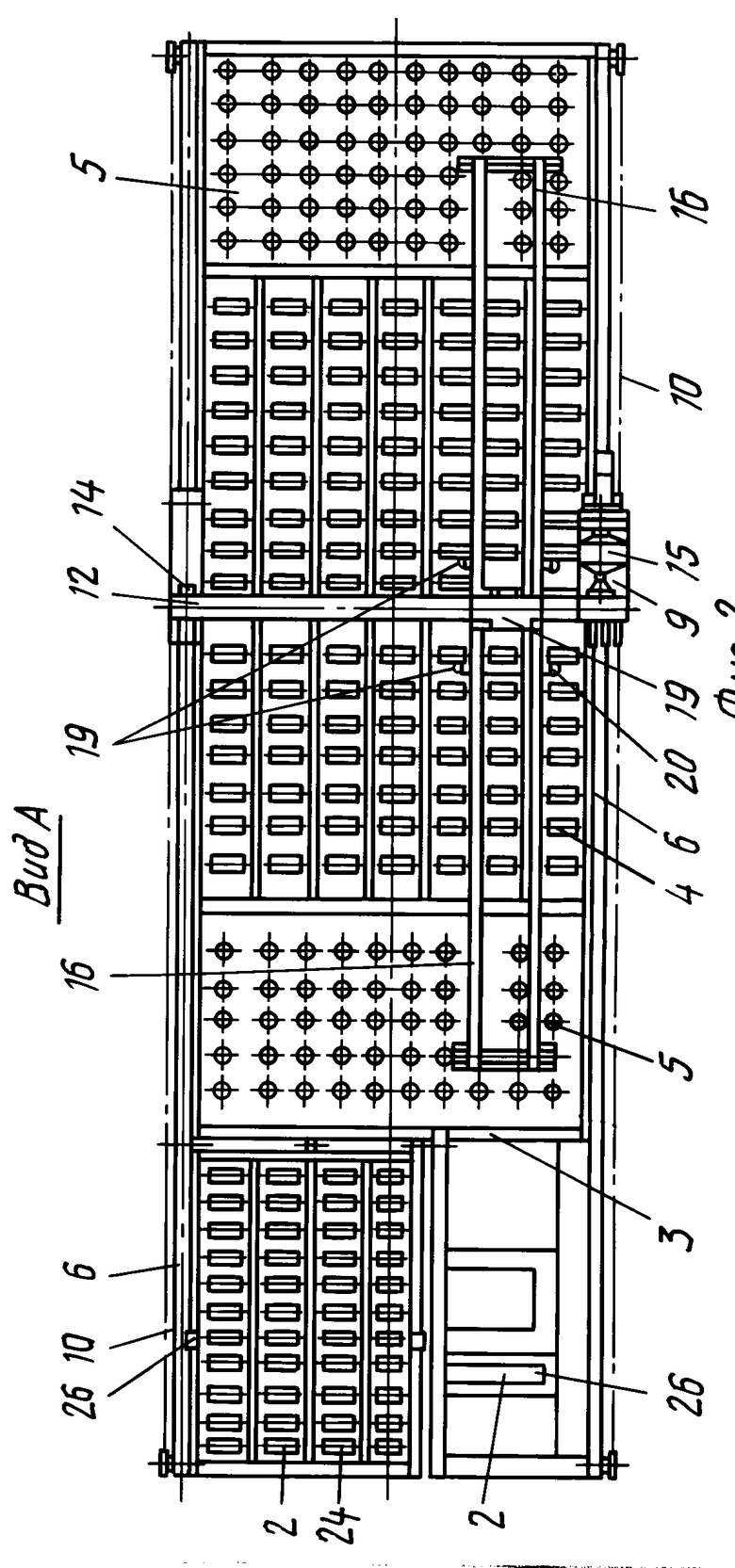
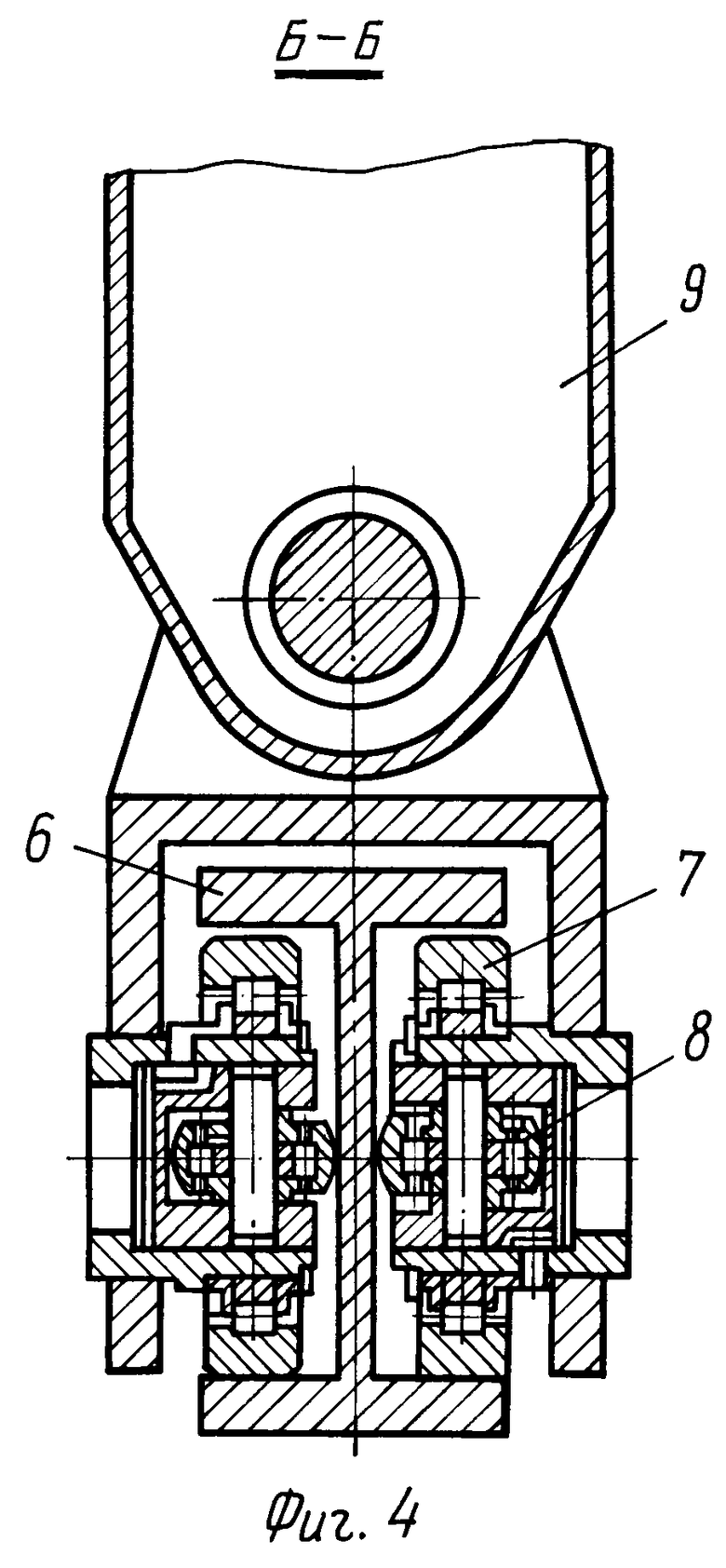
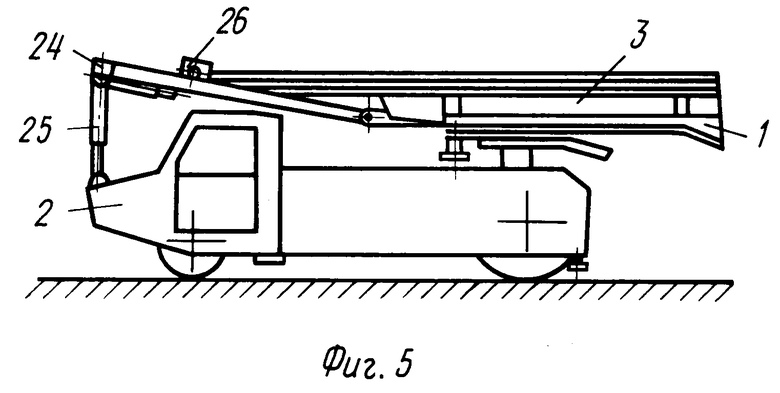
На фиг. 1 изображено погрузочно-разгрузочное устройство, общий вид; на фиг.2 - вид по стрелке А на фиг.1; на фиг.3 - вид по стрелке Б на фиг.1; на фиг.4 - сечение Б-Б на фиг.1; на фиг.5 - транспортное положение платформы.
Погрузочно-разгрузочное устройство транспортного средства для перевозки контейнеров в аэропортах представляет собой полуприцеп 1, установленный на тягаче 2 (фиг.1, 2 и 3). На раме полуприцепа 1 установлена платформа 3, содержащая роликовые 4 и шариковые 5 пассивные (неприводные) дорожки (фиг.2). Вдоль бортов платформы 3 закреплены направляющие 6, на которых посредством роликов 7, 8 (фиг.4) установлен портал 9, перемещаемый по этим направляющим посредством цепной передачи 10 и приводом 11. На поперечине 12 портала смонтирована тележка 13, перемещаемая по направляющим этой поперечины при помощи автономной цепной передачи 14 и привода 15. Тележка 13 оборудована двусторонней стрелой 16 с установленными на обеих ее концах гидроупорами и грузозахватными рычагами, предназначенными для продольного перемещения перегружаемых контейнеров и состоящими из двух рычагов 17, шарнирно соединенных гидроцилиндром 18 для установки этих рычагов в горизонтальное (нерабочее) и вертикальное (рабочее) положение. В средней части стрелы 16 размещены две пары (левая и правая) гидроупоров 19 и 20 для поперечного перемещения контейнеров. В зависимости от высоты контейнера посредством гидроцилиндра 21 изменяется положение поперечины портала и тележки по высоте.
Для обеспечения единого уровня полуприцепа 1 с полом грузового люка или роликовой рампы путем регулирования ее высоты он снабжен внешними опорами 22 и 23 (фиг.1), при этом платформа 3 (фиг.5) снабжена дополнительной платформой 24 с роликовыми опорами и шарнирно связанной с передней частью платформы 3. Другой конец дополнительной платформы 24 посредством присоединенных к ней гидроцилиндров 25 присоединен к раме шасси. В транспортном положении гидроцилиндры 25 от тягача 2 отсоединены и закреплены на дополнительной платформе 24, которая при этом посредством фиксатора 26 зафиксирована в наклонном положении для обеспечения маневренности тягача.
Транспортное средство работает следующим образом.
При загрузке полуприцеп 1 тягачом 2 устанавливают у проема грузового люка самолета или роликовой рампы, секцию 24 с роликовой дорожкой снимают с фиксаторов 26 и гидроцилиндрами 25 устанавливают в горизонтальное положение. При помощи аутригеров 22, 23 и аутригеров тягача 2 полуприцеп 1 выставляют по уровню пола грузового люка самолета или роликовой рампы, стрела 16 порталом 9 вводится в проем люка самолета или роликовой рампы над контейнером до момента, пока рычаги 17 не окажутся за контейнером. В этом положении рычаги 17 под действием гидроцилиндра 18 устанавливают в вертикальное положение и при обратном ходе портала 9 рычаги 17 наталкиваются на контейнер и затягивают его на полуприцеп 1 в зону шариковой дорожки 5. В этом положении контейнер останавливают и включают привод поперечного перемещения каретки 13. Под действием цепной передачи 14 и привода 15 каретку 13 смещают в сторону от продольной оси контейнера до момента, пока штыри гидроупоров 19(20) не окажутся за боковой стенкой контейнера, в этом положении штыри гидроупоров 19(20) выдвигают и при обратном движении каретки 13 они наталкиваются на боковую стенку контейнера, смещая его в поперечном направлении до необходимого положения. После этого штыри гидроупоров 19(20) поднимают, каретку 13 устанавливают на продольной оси контейнера, включают привод каретки 15 и контейнер устанавливают в необходимое место продольной многорядной роликовой дорожки 4.
Таким образом производят поочередно загрузку и размещение контейнеров на полуприцеп 1. По окончании загрузки дополнительную платформу 24 с роликовой дорожкой устанавливают в наклонное положение при помощи гидроцилиндров 25 и фиксируют фиксаторами 26, после чего гидроцилиндры 25 отсоединяют от тягача 2, аутригеры 22, 23 поднимают и полуприцеп 1 отводят от борта самолета или рампы.
Разгрузку платформы производят аналогично, только в этом случае контейнеры сталкиваются рычагами 17 с полуприцепа 1.
Оснащение транспортного средства для перевозки контейнеров в аэропортах порталом с двусторонней стрелой, оборудованной грузозахватными рычагами, позволяет расширить зону его использования, т.е. выходить за зону платформы, захватывать контейнер и затягивать его на платформу или сталкивать его за пределы платформы, кроме того, увеличить эксплуатационную надежность по сравнению с известными системами приблизительно в 3 раза, удешевить изготовление транспортной системы, так как не требуется дополнительных грузоподъемных средств или приводов роликошариковых дорожек платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРАНСПОРТИРОВКИ, ЗАГРУЗКИ И РАЗГРУЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ В ГРУЗОВУЮ КАБИНУ САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2248308C2 |
| Транспортер-погрузчик пакетированных грузов | 1980 |
|
SU849701A1 |
| Управляемый колесный погрузочно-разгрузочный комплекс для транспортных самолетов, оборудованных грузовой рампой, и способ погрузки-выгрузки крупногабаритных грузов в/из транспортных самолетов с использованием управляемого колесного погрузочно-разгрузочного комплекса для транспортных самолетов | 2017 |
|
RU2660194C1 |
| Полуприцеп-контейнеровоз с устройствами для погрузки и разгрузки | 1985 |
|
SU1355516A2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КИРПИЧА И ЛИНИЯ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 1993 |
|
RU2047484C1 |
| Схват манипулятора | 1991 |
|
SU1802792A3 |
| Навесной погрузчик к безрельсовому транспортному средству | 1978 |
|
SU789292A1 |
| СПОСОБ ПЕРЕГРУЗКИ ГРУЗОВ И СООТВЕТСТВУЮЩАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2005 |
|
RU2374107C2 |
| Установка для фиксации и подачи овец на обработку | 1988 |
|
SU1664216A1 |

Использование: относится к транспортным средствам, используемым в технологических процессах перегрузки контейнеров в аэропортах на участке самолет-склад или склад-самолет. Сущность: устройство содержит смонтированную на раме шасси грузовую платформу 3 с роликовыми опорами и шариковыми опорами и портал 9 с грузозахватным органом. Портал 9 установлен с возможностью перемещения вдоль направляющих 6, закрепленных на грузовой платформе симметрично продольной ее оси. На поперичине 12 портала установлена с возможностью перемещения приводом каретка 13, на которой смонтирован грузозахватный орган, представляющий собой жестко закрепленную на каратке двустороннюю стрелу с установлеными на обеих ее концах грузозахватными рычагами 17 для перемещения контейнера в продольном направлении. Рычаги 17 шарнирно закреплены на свободных концах стрелы с возможностью поворота в вертикальной плоскости. Гидроупоры укреплены в средней части и предназначены для перемещения контейнеров в поперечном направлении при взаимодействии штоков гидроупоров с поверхностью контейнеров. 2 з.п. ф-лы, 5 ил.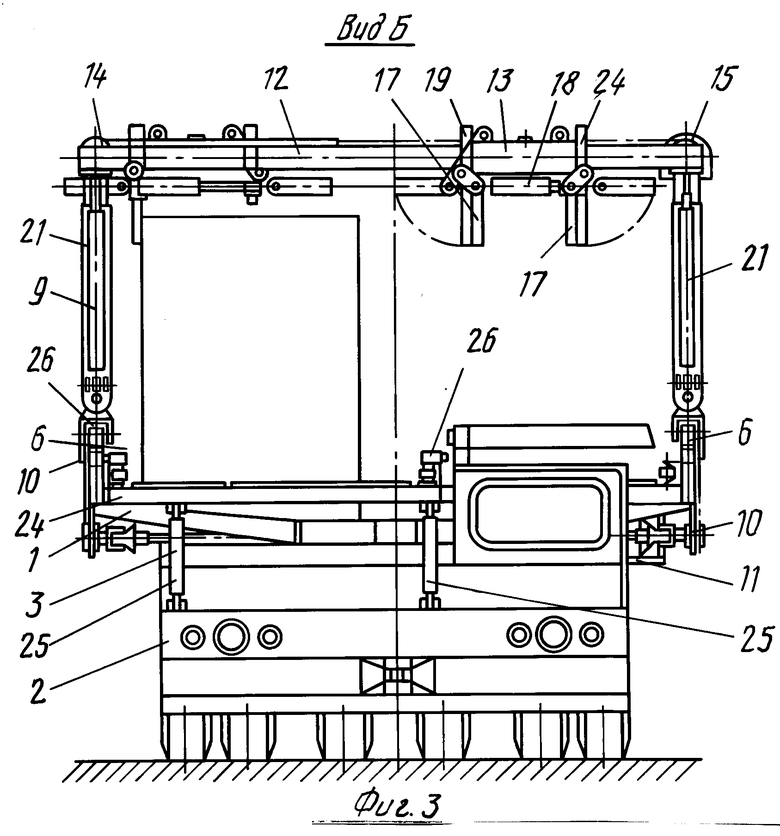
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЭЛЕКТРОННЫЕ ОФТАЛЬМОЛОГИЧЕСКИЕ ЛИНЗЫ С МНОГОКАНАЛЬНОЙ СХЕМОЙ ГОЛОСОВАНИЯ | 2013 |
|
RU2567178C2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
