Изобретение относится к области измерительной техники и может быть использовано для бесконтактного измерения формы поверхности сложных трехмерных объектов в машиностроении, медицине, стоматологии, судебно-медицинской экспертизе и т.д. Изобретение может с успехом использоваться в технологических процессах создания объектов сложной формы (лопатки турбин и т.п.). Кроме того, изобретение может быть использовано в различных приложениях компьютерной трехмерной графики.
Известен способ, реализующий принцип сканирующей подсветки, который используется в трехмерной компьютерной анимации и некоторых других приложениях для регистрации формы поверхности. Способ заключается в том, что последовательно сканируют отдельные контуры поверхности светящейся полосой и судят о контролируемых размерах по степени искажения изображения полосы и местоположению полосы в декартовой системе координат [Техническое зрение роботов. - под. ред. А.Пью, пер. с англ. - М.: Машиностроение, 1987, с.56-57].
Недостатком известного способа является низкая точность и длительное время контроля, связанные с наличием операции и блока сканирования.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам [РСТ WO 00/70303, РСТ/US99/70303, кл. G01B 11/24, 23.11.2000]. Способ заключается в том, что на объект проецируется система разноцветных полос, создаваемая путем пространственной модуляции вдоль одной координаты интенсивности зондирующего оптического излучения. Система разноцветных полос носит периодический характер и создает структурированную подсветку. В результате в одном кадре регистрируется целиком вся попадающая в поле зрения фотоприемного устройства часть поверхности контролируемого объекта и наложенное на поверхность искаженное изображение структурированной подсветки. О контролируемых размерах судят по степени искажений изображения множества полос и местоположению полос в декартовой системе координат.
Недостатком известного способа является низкая точность, связанная с невозможностью однозначно интерпретировать разрывы в изображении полос, искаженных либо рельефом поверхности контролируемого объекта, либо низким значением спектрального коэффициента отражения, зависящего от материала и цвета какого-либо участка поверхности контролируемого объекта.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам [М.Франсон. Оптика спеклов. - М.: Мир, 1980, с.141-143]. Способ заключается в том, что на объект проецируется система концентрических полос, создаваемая путем подсветки когерентным излучением, содержащим спекл-структуру либо в виде системы концентрических полос, либо в виде хаотично расположенных зон, форма которых единообразна. Искаженная рельефом поверхности структурированная подсветка регистрируется при изменении длины волны излучения, по меньшей мере, два раза. Полученная таким образом псевдоголограмма содержит систему интерференционных полос, расстояние между которыми в разных точках соответствует высоте рельефа. Соответствующая обработка на ЭВМ совокупности данных о величине вышеуказанных расстояний позволяет судить о рельефе поверхности контролируемого объекта.
Недостатком известного способа является низкая достоверность получаемых данных о контролируемой поверхности на участках поверхности, отражение которых резко отличается от диффузного.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам [РСТ WO 99/58930, PCT/US99/106777 кл. G01B 11/24, 1999 г.]. Способ заключается в формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, пространственно модулированного по интенсивности, регистрации изображения искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определении с помощью цифрового электронного вычислителя высоты рельефа поверхности контролируемого объекта по величине искажений изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированном изображении.
Недостатками известного способа является высокая погрешность, обусловленная тем, что при направлении на поверхность контролируемого объекта, модулированного по одной координате транспарантом с неизменной периодической структурой оптического изучения, нельзя предусмотреть либо заранее учесть искажения картины, вызванные различными отражательными свойствами поверхности и глубокими впадинами, которые невозможно идентифицировать без априорной информации о макроструктуре поверхности контролируемого объекта.
Наиболее близким из известных по своей технической сущности и достигаемому результату является выбранный в качестве прототипа способ контроля линейных размеров трехмерных объектов по трем декартовым координатам [патент РФ №2185598, кл. G01B 11/24, 2003 г.]. Способ заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения по одной координате, так, что на поверхности контролируемого объекта создается изображение структурированной подсветки в виде апериодической совокупности полос, регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки, которую производят путем накопления суммарного изображения, определении положения искажений структуры подсветки в зарегистрированных изображениях по расстоянию вдоль полосы и номеру полосы, формируемому логическим суммированием двоичных чисел, кодирующих положение полос в каждой из реализаций апериодической совокупности полос так, что единица соответствует наличию полосы, а нуль - отсутствию полосы.
Недостатком известного способа является низкая точность определения линейных размеров, ограниченная точностью определения координат формируемой полосы на регистраторе изображения. Низкая точность определения координат полосы обусловлена сложностью детектирования полосы на участках объекта, имеющих различные отражательные свойства и наличие нелинейной передаточной характеристики между пространственным модулятором оптического излучения и приемником оптического излучения, которая как правило носит степенной характер.
Сущность предложенного способа заключается в том, что дополнительно для каждой точки на зарегистрированных изображениях определяют зависимость яркости точки на изображении от яркости зондирующей подсветки с помощью последовательного формирования равномерной пространственной модуляции оптического излучения и регистрации изображений, линейно меняя яркость источника, используют полученную зависимость для определения степени искажения изображения структуры зондирующей подсветки при определении высоты рельефа поверхности.
На чертеже изображена схема устройства, реализующего предлагаемый способ. Устройство содержит источник оптического излучения 1, пространственный модулятор интенсивности 2, фоторегистратор 3, цифровой электронный блок 4, блок регистрации результатов 5. Вход цифрового электронного блока 4 соединен с выходом фоторегистратора 3, а выход соединен с управляющим входом модулятора 2.
Способ бесконтактного контроля линейных размеров трехмерных объектов осуществляют следующим образом.
Интенсивность оптического излучения, выходящего из источника 1, модулируется пространственным модулятором света 2. Созданная таким образом структурируемая подсветка проецируется на поверхность контролируемого объекта, рельеф которой известным образом искажает изображение структурируемой подсветки. Фоторегистратор 3 регистрирует изображение контролируемого объекта и передает на вход электронного блока 4. Электронный блок 4 преобразует сигнал с выхода фоторегистратора 3 и записывает очередное изображение структурируемой подсветки во внутреннее запоминающее устройство. Одновременно в памяти электронного блока 4 записывается изображение структурированной подстветки, созданной пространственным модулятором 2. Перечисленную выше последовательность повторяют второй раз, но при этом по сигналу с выхода цифрового электронного блока 4 модулятор 2 формирует структурированную подсветку, соответствующую второй реализации. Число повторений вышеописанного цикла и количество реализации структурированных подсветок устанавливают в зависимости от требуемой точности определения линейных размеров контролируемого объекта и, практически, ничем не ограничены. Направления освещения и наблюдения устанавливают различными. Профиль поверхности восстанавливают из величины искажений наблюдаемых изображений структурируемых подсветок.
Пусть V - интенсивность пространственно модулированного света, излучаемая на точку исследуемого объекта, I - интенсивность на том пикселе изображения, в который проецируется эта точка. Тогда зависимость интенсивности, наблюдаемой на изображении от интенсивности, излучаемой источником света, можно представить некоторой нелинейной функцией K:

Если светорассеивающие свойства объекта, параметры внешнего освещения и внутренние параметры модулятора оптического излучения и приемника не изменяются в процессе измерения, то функция K идентична для каждого из всех пикселей изображения. Если функция K является гладкой и непрерывной в диапазоне принимаемых значений, то можно вычислить обратную функцию K-1.
Перед освещением измеряемого объекта серией структурированных засветок для определения функции K проводят «калибровку» тракта источник-приемник оптического излучения. Для этого последовательно освещают исследуемый объект, обеспечивая равномерную пространственную модуляцию источника излучения, и изменяют интенсивность засветки по линейному закону:

где i - порядковый номер равномерной засветки,  - интенсивность первой реализации засветки, dV0 - шаг приращения интенсивности засветки.
- интенсивность первой реализации засветки, dV0 - шаг приращения интенсивности засветки.
Затем, для каждой точки на принятых изображениях строят зависимость интенсивности источника оптического излучения от наблюдаемой интенсивности на принятом изображении:

В результате получают функцию, характеризующую нелинейность тракта источник-приемник оптического излучения. Далее строят обратную функцию K-1, используя которую можно восстановить истинное значение интенсивности излучения по величине зарегистрированной интенсивности изображения в точке:

Следовательно, имея функцию K-1, после получения изображений исследуемого объекта, освещенного структурированными засветками, можно восстановить величину интенсивности модулированного оптического излучения:

где U(x,y) - распределение интенсивности света, которое наблюдается на изображении измеряемого объекта. Использование функции U(x,y) вместо I(x,y) при определении степени искажений изображения структуры зондирующей подсветки позволяет исключить систематическую погрешность измерения, вызванную нелинейной передаточной функцией. В результате повышается точность и достоверность контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2009 |
|
RU2433372C2 |
| Способ бесконтактного измерения линейных размеров вращающихся трехмерных объектов | 2021 |
|
RU2772088C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185598C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199716C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185599C1 |
| СПОСОБ ЛАЗЕРНОГО ВИДЕОИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2007 |
|
RU2338998C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2184933C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТРЕХМЕРНОЙ ФОРМЫ ОБЪЕКТОВ | 2012 |
|
RU2491503C1 |
Способ заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения и последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки. Определение высоты рельефа поверхности контролируемого объекта осуществляют по степени искажения изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированных изображениях. Для каждой точки на зарегистрированных изображениях определяют зависимость яркости точки на изображении от яркости зондирующей подсветки с помощью последовательного формирования равномерной пространственной модуляции оптического излучения и регистрации изображений, линейно меняя яркость источника. Полученную зависимость используют для определения степени искажения изображения структуры зондирующей подсветки при определении высоты рельефа поверхности. Технический результат заключается в повышении точности и достоверности контроля. 1 ил.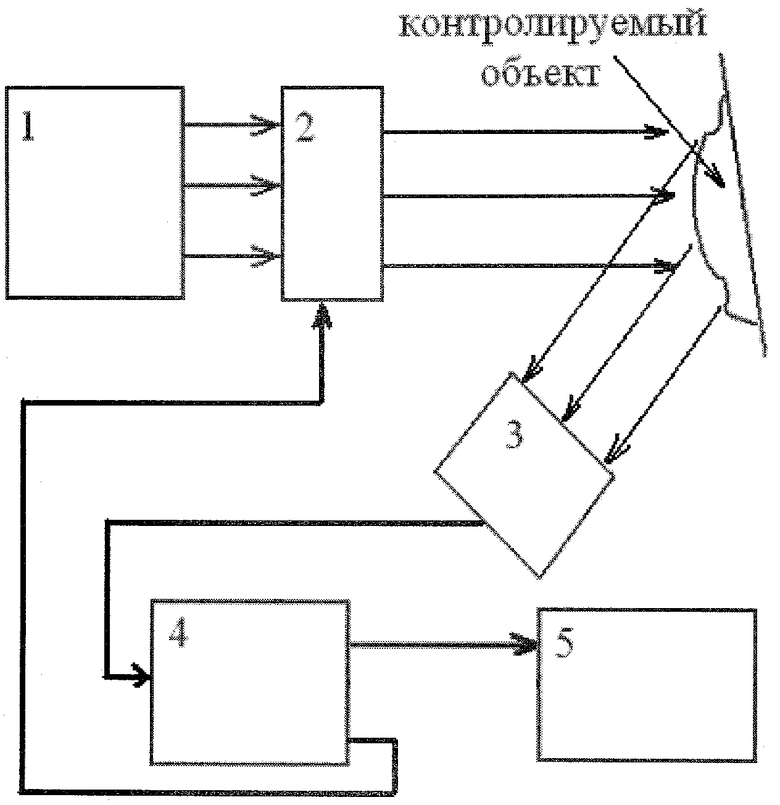
Способ бесконтактного измерения геометрии трехмерных объектов, заключающийся в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения, последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определении высоты рельефа поверхности контролируемого объекта по степени искажения изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированных изображениях, отличающийся тем, что дополнительно для каждой точки на зарегистрированных изображениях определяют зависимость яркости точки на изображении от яркости зондирующей подсветки с помощью последовательного формирования равномерной пространственной модуляции оптического излучения и регистрации изображений, линейно меняя яркость источника, используют полученную зависимость для определения степени искажения изображения структуры зондирующей подсветки при определении высоты рельефа поверхности.
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ДИАГНОСТИЧЕСКИХ, ТАКТИЧЕСКИХ И ТЕРАПЕВТИЧЕСКИХ ОШИБОК ПРИ НЕОТЛОЖНЫХ СОСТОЯНИЯХ НЕВРОЛОГИЧЕСКОГО ПРОФИЛЯ | 2000 |
|
RU2175231C1 |
| US 6754370 B1, 22.06.2004 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185598C1 |
| Шахтная печь | 1972 |
|
SU630504A1 |

