Изобретение относится к локации, а именно к способам определения статистических характеристик морского волнения посредством локатора, установленного на приводненном летательном аппарате (ЛА).
Известен способ определения направления распространения морских волн с ЛА при полете по окружности на постоянной высоте, описанный в кн. Гарнакерьян А. А. Сосунов А.С. Радиолокация морской поверхности. Ростов-на-Дону: изд-во Ростовского ун-та, 1978, с.113-119, использующий бортовой коротковолновый импульсный радиолокатор с антенной, жестко связанный с ЛА, направленной к морской поверхности и имеющей широкую диаграмму направленности, при этом из последовательности эхо-сигналов от морской поверхности выделяют их центрированную огибающую, при переходе которой через нулевой уровень формируют последовательность импульсов, усредненная частота следования которых пропорциональна среднеквадратической частоте морских волн, увеличивают периоды следования этой последовательности импульсов пропорционально скорости полета и преобразуют их в напряжение, пропорциональное усредненному периоду повторения импульсов, по которому измеряют текущую длину морских волн в зависимости от изменения текущего курса полета, анализируют распределение измеренных значений длин волн и выделяют курс полета, на котором измерено минимальное значение длины волн, совпадающее с направлением распространения волн.
Недостаток этого способа заключается в том, что не представляется возможным использовать его на летательном аппарате, находящемся на плаву. Во-первых, из-за сложности развязки приемного и передающего трактов КВ радиолокатора при работе в ближней зоне, а во-вторых, из-за сложности обеспечения кругового движения летательного аппарата на морской поверхности.
Известен способ определения функции углового распределения общей энергии в спектре ветрового волнения моря, описанный в а.с. СССР N 2989911, КЛ 2 G 01 S 9/60, 1971 г. состоящий в облучении участка морской поверхности радиоимпульсами бортового радиолокатора со стабилизированной в горизонтальной плоскости антенной, приеме последовательности эхо-сигналов при вращении антенны по азимуту в секторе 0 360o и определении ширины допплеровского спектра огибающей в зависимости от направления облучения. По амплитуде синусоидальной составляющей и среднему значению ширины допплеровского спектра этой последовательности эхо-сигналов в зависимости от направления облучения судят об искомом параметре, например длине морских волн (МВ), направлении их распространения и высоте.
Недостаток этого способа состоит в том, что применительно к использованию на приводненном ЛА технически сложной задачей является стабилизация антенны радиолокатора в горизонтальной плоскости.
Известен способ определения главного направления распространения МВ и линий их гребней, описанный в а.с. СССР N 294116, КЛ G 01 S 9/60, 1971 г. основанный на зависимости интенсивности рассеянного морской поверхностью радиолокационного сигнала от курсовых углов стабилизированной в горизонтальной плоскости антенны, выполняющей круговое вращение в этой плоскости, при фиксированной стробированной дальности. При этом определяют четыре курсовых угла, при которых интенсивность сигнала имеет экстремальные значения, и по полученным значениям курсовых углов, соответствующих максимумам интенсивности сигнала, определяют главное направление распространения МВ, а по курсовым углам, соответствующим минимальным интенсивностям сигнала, направление линий гребней.
Недостатком этого способа является требование к жесткой стабилизации антенны, которое технически сложно удовлетворить при использовании способа на приводненном ЛА, испытывающем воздействие волновых колебаний морской поверхности.
Наиболее близким по технической сущности к заявляемому является способ определения расстояния до водной поверхности, использующий посылки на водную поверхность импульсов оптического излучения, прием отраженного сигнала и определение расстояния до водной поверхности по времени прихода отраженного сигнала, причем из отраженного сигнала выделяют спектр фотолюминисценции, который используют для определения расстояния [1]
Недостатком этого способа является невозможность измерения направления распространения МВ.
Заявляемый способ обеспечивает возможность измерения направления распространения МВ с летательного аппарата на плаву. Этот технический результат достигается тем, что в известном способе, основанном на облучении морской поверхности импульсным сигналом, приеме отраженного сигнала и определении текущего расстояния до точки на морской поверхности по времени прихода отраженного сигнала, с помощью дополнительно размещенной на летательном аппарате приемоизлучающей системы при нахождении летательного аппарата на плаву дополнительно определяют текущее расстояние до другой точки морской поверхности, причем вторая приемоизлучающая система размещается совместно с первой под крылом летательного аппарата на расстоянии от первой, меньшем половины длины морских волн, определяют собственные текущие вертикальные перемещения двух приемоизлучающих систем локатора путем анализа текущих значений ускорений, измеренных с помощью двух акселерометров, размещенных совместно с приемоизлучающими системами, а также определяют вертикальные перемещения морской поверхности в двух разнесенных точках относительно среднего уровня путем вычитания из текущего расстояния от каждой приемоизлучающей системы до поверхности его усредненного по множеству измерений значения и значения собственного перемещения каждой приемоизлучающей системы, определяют знаки вертикальных перемещений морской поверхности относительно среднего уровня под первой и второй приемоизлучающими системами, определяют вероятность различных знаков этих колебаний, измеряют средний период колебаний поверхности моря и вычисляют угол между продольной осью симметрии летательного аппарата и направление распространения морских волн по формуле
где  знак угла γ;
знак угла γ; усредненная длина морских волн;
усредненная длина морских волн;
L расстояние между первой и второй приемоизлучающими системами; вероятность различных знаков колебаний морской поверхности под первой и второй приемоизлучающими системами;
вероятность различных знаков колебаний морской поверхности под первой и второй приемоизлучающими системами;
hAi ордината колебания морской поверхности под первой приемоизлучающей системой;
hBi ордината колебания морской поверхности под второй приемоизлучающей системой;
N количество отсчетов в пределах анализируемой реализации;
i индексы, соответствующие отсчетам в моменты времени, отделенные интервалом дискретизации;
g ускорение свободного падения;
T средний период морского волнения.
Введенные новые операции, помещенные в отличительной части формулы изобретения, как и известные операции прототипа, относятся к существенным признакам и образуют их новую совокупность, так как находятся в причинно-следственной связи с достигаемым, более высоким, чем в прототипе, техническим результатом.
На фиг.1 показан вид сверху на планер летательного аппарата. Линия OD - продольная ось симметрии летательного аппарата. А и В точки, соответствующие расположению первой и второй приемоизлучающих систем. Вектор OF показывает направление движения фронта морской волны. Отрезок АС расположен на линии, параллельной фронтам морских волн, угол ACB прямой. Угол γ образован линиями OD и OF. Одновременно это угол между отрезками CA и AB. Длина отрезка AB равна расстоянию L между приемоизлучающими системами.
Пусть длина отрезка CB равна b. Тогда угол между продольной осью симметрии летательного аппарата и направлением движения морской волны можно определить по формуле
Морское волнение это узкополосный процесс с нормальным законом распределения, нормированная корреляционная функция которого вычисляется по формуле
ρ(τ) = exp[-α/τ] cosβτ ,
где α и β коэффициенты, слабо зависящие от временного сдвига t (см. например, кн. И. М.Давидан, Л.И.Лопатухин, В.А.Рожков. Ветровое волнение как вероятностный гидродинамический процесс. Л. Гидрометеоиздат, 1978. с.24). При t ≅ 0,5T, где Т средний период морского волнения, exp[-α|τ|] ≈ 1, β = 2π/T нормированная корреляционная функция хорошо аппроксимируется формулой
Усредненное время τ1, в течение которого фронт волны проходит от точки А, где находится первая приемоизлучаещая система, до места нахождения второй приемоизлучающей системы в точке В, можно определить, преобразовав формулу (2) к виду
Таким образом, ρ(τ1) = ρAB это коэффициент взаимной корреляции процессов в точках А и В. За время τ1 фронт перемещается на расстояние, равное b. При средней длине морских волн λ и средней скорости их движения V = λ/T это расстояние можно определить так
Подставив (3) в (1), получим величину угла между продольной осью симметрии летательного аппарата и направлением движения морских волн
Нормированный коэффициент корреляции можно выразить через вероятность того, что знаки ординат колебаний поверхности в точках А и В одинаковы (см. например, кн. Г.Я.Мирский. Аппаратурное определение характеристик случайных процессов. М. Энергия, 1972. С.163). Обозначив эту вероятность p0, получим
ρAB= - cos πp°. (5)
С учетом (5) формула (4) примет вид
и после тригонометрических преобразований получим
Учитывая, что вероятность различных знаков приращений колебаний морской поверхности по сравнению со средним уровнем в точках А и В равна p 1 - p0, формулу (6) можно переписать так
Ординаты колебаний морской поверхности относительно среднего уровня под первой и второй приемоизлучающими системами hi находятся по формуле
где li отсчеты расстояния от морской поверхности до места размещения приемоизлучающей системы; вертикальные перемещения приемоизлучающей системы;
вертикальные перемещения приемоизлучающей системы;
N количество отсчетов в пределах анализируемой реализации;
Δt интервал дискретизации;
vn= v разность вертикальной составляющей скорости приемоизлучающей системы и ее начального значения, равного
разность вертикальной составляющей скорости приемоизлучающей системы и ее начального значения, равного
ai вертикальные ускорения приемоизлучающей системы, измеренные акселерометром;
i, n индексы, соответствующие отсчетам в моменты времени iΔt и nΔt.
Оценку вероятности различных знаков ординат колебаний поверхности в точках А и В можно сделать по формуле
В этой формуле sgn знаковая функция; модуль разности sgn hAi - sgn hBi 2 при различных знаках hAi и hBi и равен нулю, когда знаки одинаковы.
Усредненный период морских волн Т определяется путем подсчета количества положительных переходов N
В формуле (7) аргумент функции arcsin принимает только положительные значения, и, таким образом, невозможно различить, движется ли волна от левого борта к правому, или наоборот. Избежать неопределенности при измерении можно определив знак γ по формуле
где sgn hBi знак ординаты колебаний поверхности под второй приемоизлучающей системой;
hAi hAi-1 разность уровней морской поверхности под первой приемоизлучающей системой в моменты времени ti-1= ti- Δt, где Δt шаг дискретизации;
sgn (hAi hAi-1) знак соответствующей разности.
С учетом (8) формула (7) окончательно примет вид
Таким образом, использование второй приемоизлучающей системы, расположенной на крыле летательного аппарата на расстоянии, меньшем половины из наименьших измеряемых длин волн от первой приемоизлучающей системы, позволяет вычислить вероятность различных знаков ординат колебаний морской поверхности под первой и второй приемоизлучающими системами и определить затем угол между продольной осью симметрии летательного аппарата и направлением движения морских волн.
Для подтверждения возможности осуществления изобретения далее приведен пример реализации способа.
На фиг.2 приведена структурная схема устройства, определяющего ординаты колебаний морской поверхности относительно среднего уровня.
Устройство содержит акселерометр 1, аналого-цифровой преобразователь (АЦП) 2, первый сумматор 3, первый блок умножения 4, второй сумматор 5, первый блок деления 6, первый и второй регистры 7 и 8, блок ввода 9, блок памяти 10 объемом 2N+2 чисел, третий и четвертый регистры 11 и 12, первый блок вычитания 13, третий сумматор 14, второй блок умножения 15, второй блок вычитания 16, четвертый сумматор 17, второй блок деления 18 и третий блок вычитания 19.
Выход блока 19 является выходом устройства 20, а входы 21 и 22 являются соответственно управляющим и информационным входами устройства.
Выход акселерометра 1 подключен к входу третьего блока вычитания 19 через последовательно соединенные АЦП 2, первый сумматор 3, первый блок умножения 4, второй сумматор 5, первый блок деления 6 и блок памяти 10, первый сумматор 3 через первый регистр 7 подключен к своему второму входу, второй сумматор 5 через второй регистр 8 также подключен к своему второму входу, управляющий уход устройства 21 соединен со вторыми входами АЦП 2, первого блока деления 6 и блока памяти 10, выход первого блока умножения 4 подключен к третьему входу блока памяти 10, информационный вход устройства 22 через блок ввода 9 подключен к четвертому входу блока памяти 10, второй выход блока памяти 10 подключен к второму входу третьего блока вычитания 19, третий и четвертый выходы блока памяти 10 подключены к первому и второму входам первого блока вычитания 13, выход блока вычитания 13 подключен к пятому входу блока памяти 10 через последовательно соединенные третий сумматор 14, второй блок умножения 15, второй блок вычитания 16, четвертый сумматор 17 и второй блок деления 18, пятый выход блока памяти 10 подключен к второму входу второго блока вычитания 16, третий сумматор 14 через третий регистр 11 подключен к своему второму входу, выход второго блока вычитания 16 подключен к шестому входу блока памяти 10, четвертый сумматор 17 через четвертый регистр 12 подключен к своему второму входу.
Акселерометр 1 определяет текущее значение ускорения а в месте расположения приемоизлучающей системы. АЦП 2 преобразует выборки значений ускорения в моменты времени, отделенные интервалом дискретизации, в цифровой код. Первый сумматор 3 служит для получения суммы  . Первый блок умножения 4 предназначен для вычисления величины
. Первый блок умножения 4 предназначен для вычисления величины  . Второй сумматор 5 служит для получения суммы
. Второй сумматор 5 служит для получения суммы  . Первый блок деления 6 предназначен для вычисления величины
. Первый блок деления 6 предназначен для вычисления величины  . Первый регистр 7 осуществляет задержку
. Первый регистр 7 осуществляет задержку  на время Δt. Второй регистр 8 осуществляет задержку суммы
на время Δt. Второй регистр 8 осуществляет задержку суммы  на время Δt. Блок ввода 9 служит для ввода в устройство отсчетов расстояния от морской поверхности до места размещения приемоизлучающей системы Li. Блок памяти 10 служит для записи массивов отсчетов li объемом N чисел, отсчетов v
на время Δt. Блок ввода 9 служит для ввода в устройство отсчетов расстояния от морской поверхности до места размещения приемоизлучающей системы Li. Блок памяти 10 служит для записи массивов отсчетов li объемом N чисел, отсчетов v
Третий регистр 11 служит для записи, хранения и выдачи сумм  . Четвертый регистр 12 служит для записи, хранения и выдачи слагаемых суммы
. Четвертый регистр 12 служит для записи, хранения и выдачи слагаемых суммы  . Первый блок вычитания 13 предназначен для определения Vn. Третий сумматор 14 вычисляет суммы
. Первый блок вычитания 13 предназначен для определения Vn. Третий сумматор 14 вычисляет суммы  . Второй блок умножения 15 вычисляет отсчеты si. Второй блок вычитания 16 вычисляет разности (li - si). Четвертый сумматор 17 вычисляет величину суммы
. Второй блок умножения 15 вычисляет отсчеты si. Второй блок вычитания 16 вычисляет разности (li - si). Четвертый сумматор 17 вычисляет величину суммы  . Второй блок деления 18 служит для определения величины
. Второй блок деления 18 служит для определения величины  . Третий блок вычитания 19 вычисляет значения hi. На выходе 20 устройства формируются текущие значения ординат hi колебания морской поверхности под приемоизлучающей системой. Управляющий вход 21 устройства служит для подачи управляющих сигналов. На информационный вход 22 подаются сигналы локатора, определяющие расстояние до водной поверхности.
. Третий блок вычитания 19 вычисляет значения hi. На выходе 20 устройства формируются текущие значения ординат hi колебания морской поверхности под приемоизлучающей системой. Управляющий вход 21 устройства служит для подачи управляющих сигналов. На информационный вход 22 подаются сигналы локатора, определяющие расстояние до водной поверхности.
Работа устройства происходит следующим образом.
Акселерометр 1, установленный совместно с приемоизлучающей системой локатора, измеряет текущее значение ускорения а в точке размещения приемоизлучающей системы на крыле ЛА. Постоянное напряжение, пропорциональное текущему значению ускорения а, с выхода акселерометра 1 поступает на АЦП 2, в котором преобразуется в цифровой код. Преобразование выполняется по отдельным отсчетам в моменты времени, заданные управляющим сигналом с входа 21 устройства. Отсчеты отделяются интервалом дискретизации Δt. С выхода АЦП 2 цифровые коды отсчетов подаются на первый вход первого сумматора 3. На второй вход сумматора 3 с его выхода подается результат предыдущего суммирования, задержанный с помощью первого регистра 7 на время Δt. При этом на выходе первого сумматора 3 в моменты времени nΔt формируются суммы  . С выхода сумматора 3 результаты суммирования поступают на вход первого блока умножения 4, в котором хранится значение сомножителя Δt. В результате перемножения на выходе блока 4 получаются значения Vn, которые поступают на первый вход второго сумматора 5. На второй вход сумматора 5 с его выхода поступает результат предыдущего суммирования, задержанный на время Δt с помощью второго регистра 8. При этом на выходе второго сумматора 5 получаются суммы
. С выхода сумматора 3 результаты суммирования поступают на вход первого блока умножения 4, в котором хранится значение сомножителя Δt. В результате перемножения на выходе блока 4 получаются значения Vn, которые поступают на первый вход второго сумматора 5. На второй вход сумматора 5 с его выхода поступает результат предыдущего суммирования, задержанный на время Δt с помощью второго регистра 8. При этом на выходе второго сумматора 5 получаются суммы  . Выход второго сумматора 5 подключен к первому входу первого блока деления 6, в котором хранится значение делителя N. В момент времени NΔt по управляющему сигналу, поданному со входа устройства 21 на второй вход блока деления 6, на его выходе в результате деления суммы
. Выход второго сумматора 5 подключен к первому входу первого блока деления 6, в котором хранится значение делителя N. В момент времени NΔt по управляющему сигналу, поданному со входа устройства 21 на второй вход блока деления 6, на его выходе в результате деления суммы  на N получается величина -V0.
на N получается величина -V0.
Одновременно с включением АЦП 2 в блок памяти 10 по управляющему сигналу, поступающему на его второй вход со входа 21 устройства, начинается запись элементов массива li, поступающих на третий вход блока памяти 10 с информационного входа 22 устройства через блок ввода 9, и элементов массива v сумм. Выход третьего сумматора 14 подключен к входу второго блока умножения 15, в котором хранится значение сомножителя Δt. На выходе второго блока умножения 15 получаются отсчеты si. Выход второго блока умножения 15 подключен к первому входу второго блока вычитания 16. На его второй вход, подключенный к пятому выходу блока памяти, подаются элементы массива li. На выходе второго блока вычитания 16 получаются значения разности (li si). Выход второго блока вычитания 16 подключен к шестому входу блока памяти 10 и первому входу четвертого сумматора 17. Значение (li si) в блок памяти 10 записывается в те же ячейки, что и элементы массива v
сумм. Выход третьего сумматора 14 подключен к входу второго блока умножения 15, в котором хранится значение сомножителя Δt. На выходе второго блока умножения 15 получаются отсчеты si. Выход второго блока умножения 15 подключен к первому входу второго блока вычитания 16. На его второй вход, подключенный к пятому выходу блока памяти, подаются элементы массива li. На выходе второго блока вычитания 16 получаются значения разности (li si). Выход второго блока вычитания 16 подключен к шестому входу блока памяти 10 и первому входу четвертого сумматора 17. Значение (li si) в блок памяти 10 записывается в те же ячейки, что и элементы массива v Выход четвертого сумматора 17 соединен с входом второго блока деления 18, в котором хранится значение делителя N. В результате выполнения N-ной операции деления на его выходе получается величина
Выход четвертого сумматора 17 соединен с входом второго блока деления 18, в котором хранится значение делителя N. В результате выполнения N-ной операции деления на его выходе получается величина  . Выход второго блока деления 18 подключен к пятому входу блока памяти 10.
. Выход второго блока деления 18 подключен к пятому входу блока памяти 10.
По управляющему сигналу, поданному со входа 21 на второй вход блока памяти 10, значение  записывается в блок памяти 10 и поступает на его первый выход. На второй выход блока памяти поступают в порядке их записи элементы массива, содержащего значения (li si). Первый и второй выходы блока памяти 10 подключены к первому и второму входам третьего блока вычитания 19. После вычисления разности на его выходе, соединенном с выходом 20 устройства, получаются значения ординат колебания морской поверхности относительно среднего уровня hi.
записывается в блок памяти 10 и поступает на его первый выход. На второй выход блока памяти поступают в порядке их записи элементы массива, содержащего значения (li si). Первый и второй выходы блока памяти 10 подключены к первому и второму входам третьего блока вычитания 19. После вычисления разности на его выходе, соединенном с выходом 20 устройства, получаются значения ординат колебания морской поверхности относительно среднего уровня hi.
Два подобных устройства, расположенных в точках А и В, на информационные входы которых поступают значения расстояния от приемоизлучающих систем до водной поверхности, определяют значения двух ординат колебаний морской поверхности относительно среднего уровня hAi и hBi.
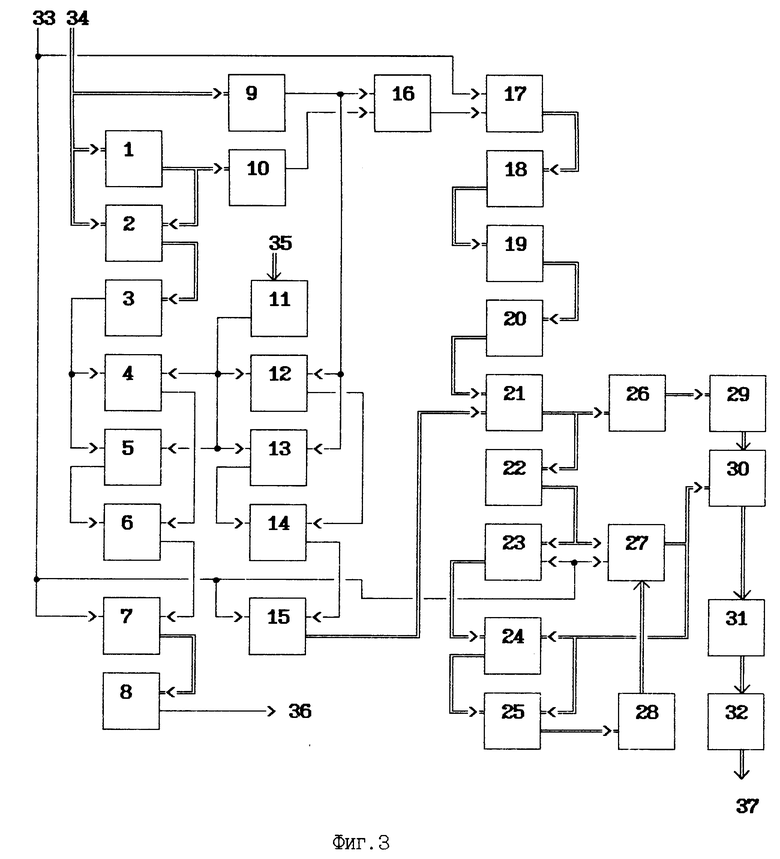
На фиг.3 приведена структурная схема устройства для определения направления распространения морских волн с летательного аппарата на плаву по измеренным значениям hAi и hBi.
Устройство содержит первый регистр 1, первый блок вычитания 2, первую схему сравнения 3, первый элемент "И" 4, первый элемент "ИЛИ-НЕ" 5, первый элемент "ИЛИ" 6, первый счетчик 7, вторую, третью, четвертую и пятую схемы сравнения 8, 9, 10 и 11, второй счетчик 15, третий элемент "И" 16, третий счетчик 17, первый блок деления 18, блок возведения в квадрат 19, первый и второй блоки умножения 20 и 21, второй блок вычитания 22, второй регистр 23, второй блок деления 24, сумматор 25, третий блок умножения 26, третий регистр 27, третий блок деления 28, третий блок вычитания 29, четвертый блок умножения 30, четвертый блок вычитания 31, пятый блок умножения 32.
Вход 33 является управляющим входом устройства, входы 34 и 35 - информационные. Выходы 36 и 37 являются выходами устройства.
Устройство позволяет по найденным в точках A и B, расположенных на расстоянии l, ординатам колебаний морской поверхности hAi и hBi определить абсолютное значение и знак угла γ по формулам (7) и (8). Значения обратной тригонометрической функции при этом вычисляются с точностью 2% из соотношения
Значение квадратного корня в последней формуле  определяется методом итерации в соответствии с равенством
определяется методом итерации в соответствии с равенством
где k номер итерации.
Устройство работает следующим образом.
На входы 34 и 35 устройства поступают отсчеты ординат колебаний морской поверхности hAi и hBi. Первый регистр 1 сдвигает отсчеты hAi на один такт. Первый блок вычитания 2 определяет разность hAi hAi-1. Первая схема сравнения 3 определяет истинность положительного знака разности hAi hAi-1. Первый элемент "И" 4 определяет истинность совпадения положительных знаков разности hAi hAi-1 и отсчетов hBi. Первый элемент "ИЛИ-НЕ" 5 определяет истинность совпадения отрицательных знаков разности hAi hAi-1 и отсчетов hBi. Первый элемент "ИЛИ" 6 определяет истинность совпадения положительных или отрицательных знаков разности hAi hAi-1 и отсчетов hBi. Первый счетчик 7 считает количество совпадений положительных или отрицательных знаков разности hAi hAi-1 и отсчетов hBi. Вторая схема сравнения 8 определяет знак угла γ Третья схема сравнения 9 определяет истинность положительного знака отсчетов hAi. Четвертая схема сравнения 10 определяет истинность отрицательного знака отсчетов hAi. Пятая схема сравнения 11 определяет истинность положительного знака отсчетов hBi. Второй элемент "И" 12 определяет истинность совпадения положительных знаков отсчетов hAi и hBi. Второй элемент "ИЛИ-НЕ" 13 определяет истинность совпадения отрицательных знаков отсчетов hAi и hBi. Третий элемент "ИЛИ-НЕ" 14 определяет истинность различных знаков отсчетов hAi и hBi. Второй счетчик 15 определяет величину  . Третий элемент "И" 16 определяет истинность совпадения положительного знака hAi и отрицательного hAi-1. Третий счетчик 17 определяет количество волн в пределах реализации процесса. Первый блок деления 18 вычисляет усредненный период морских волн Т. Блок возведения в квадрат 19 вычисляет квадрат усредненного периода морских волн. Первый блок умножения 20 вычисляет значение
. Третий элемент "И" 16 определяет истинность совпадения положительного знака hAi и отрицательного hAi-1. Третий счетчик 17 определяет количество волн в пределах реализации процесса. Первый блок деления 18 вычисляет усредненный период морских волн Т. Блок возведения в квадрат 19 вычисляет квадрат усредненного периода морских волн. Первый блок умножения 20 вычисляет значение  . Второй блок умножения 21 вычисляет значение
. Второй блок умножения 21 вычисляет значение  . Второй блок вычитания 22 определяет разность (1 х), где
. Второй блок вычитания 22 определяет разность (1 х), где  . Второй регистр 23 служит для записи и хранения значения (1 х). Второй блок деления 24 служит для получения отношения
. Второй регистр 23 служит для записи и хранения значения (1 х). Второй блок деления 24 служит для получения отношения  при k-ой итерации. Сумматор 25 позволяет определить сумму значений ск и
при k-ой итерации. Сумматор 25 позволяет определить сумму значений ск и  . Третий блок умножения 26 вычисляет произведение 0,135х. Третий регистр 27 предназначен для хранения k-той итерации текущего значения ски записи полученного решения. Третий блок деления 28 определяет величину ск+1. Третий блок вычитания 29 определяет величину (1 0, 135х). Четвертый блок умножения 30 позволяет вычислить величину
. Третий блок умножения 26 вычисляет произведение 0,135х. Третий регистр 27 предназначен для хранения k-той итерации текущего значения ски записи полученного решения. Третий блок деления 28 определяет величину ск+1. Третий блок вычитания 29 определяет величину (1 0, 135х). Четвертый блок умножения 30 позволяет вычислить величину  . Четвертый блок вычитания 31 вычисляет значения
. Четвертый блок вычитания 31 вычисляет значения  . Пятый блок умножения 32 позволяет определить абсолютное значение γ. На выходе устройства 36 получается знак угла g. На выходе 37 получается абсолютное значение угла g. Управляющий вход 33 служит для подачи управляющих сигналов.
. Пятый блок умножения 32 позволяет определить абсолютное значение γ. На выходе устройства 36 получается знак угла g. На выходе 37 получается абсолютное значение угла g. Управляющий вход 33 служит для подачи управляющих сигналов.
Отсчеты колебаний морской поверхности относительно среднего уровня в точках А и В hAi и hBi в виде цифровых кодов подаются на информационные входы устройства 34 и 35 соответственно. Отсчеты hAi поступают на входы первого регистра 1, третьей схемы сравнения 9 и на первый вход первого блока вычитания 2. На второй вход блока вычитания 2 поступают с выхода первого регистра 1 сдвинутые но один такт выборки hAi-1. На выходе первого блока вычитания 2 получаются разности hAi - hAi-1, которые подаются на вход первой схемы сравнения 3. Схема сравнения 3 сравнивает поступившую на ее вход величину с нулем, т. е. определяет знак разности hAi hAi-1. С выхода схемы сравнения 3 сигнал, соответствующих логической единице, при положительном знаке разности hAi hAi-1 или логическому нулю при отрицательном знаке поступают на первый вход первого элемента "И" 4. На второй вход первого элемента "И" 4 поступают сигналы с выхода пятой схемы сравнения 11, на вход которой подаются отсчеты hBi с информационного входа устройства 35. Таким образом, на второй вход первого элемента "И" поступают сигналы, соответствующие логической единице при положительных отсчетах hBi и логическому нулю при отрицательных. На выходе первого элемента "И" 4 получается сигнал, соответствующий логической единице, при совпадении положительных знаков разности hAi hAi-1 и отсчетов hBi и соответствующий логическому нулю в остальных случаях. Параллельно входам первого элемента "И" 4 подключены входы первого элемента "ИЛИ-НЕ" 5, на выходе которого получается сигнал, соответствующий логической единице, при совпадении отрицательных знаков разности hAi hAi-1 и отсчетов hBi и соответствующий логическому нулю в остальных случаях. С выходов первого элемента "И" 4 и первого элемента "ИЛИ-НЕ" 5 сигналы поступают на первых и второй входы первого элемента "ИЛИ" 6, на выходе которого получается сигнал, соответствующий логической единице при совпадении положительных или отрицательных знаков разности hAi hAi-1 и отсчетов hBi, т.е. при положительном знаке произведения sgn hBi•(hAi - hAi-1). С выхода первого элемента "ИЛИ" 6 сигналы поступают на первых вход первого счетчика 7, который считает количество импульсов, соответствующих логической единице. На второй вход первого счетчика 7 поступают управляющие сигналы. По управляющему сигналу, поступающему по окончании обрабатываемой реализации, содержимое счетчика подается на вход второй схемы сравнения 8 и затем для подготовки к следующему циклу измерения обнуляется. Схема сравнения 8 сравнивает количество положительных значений произведения sgn hBi•(hAi hAi-1) с величиной N/2, хранящейся в самом блоке 8. Если количество положительных значений указанных произведений больше N/2, то знак суммы  положительный и на выходе схемы сравнения 8 получается сигнал, соответствующий положительному знаку γ, в противном случае - отрицательному знаку. Выход схемы сравнения 8 подключен к выходу устройства 36.
положительный и на выходе схемы сравнения 8 получается сигнал, соответствующий положительному знаку γ, в противном случае - отрицательному знаку. Выход схемы сравнения 8 подключен к выходу устройства 36.
Третья схема сравнения 9 сравнивает поступившие на ее вход отсчеты с нулем. С выхода третьей схемы сравнения 9 сигнал, соответствующий логической единице при положительных отсчетах hAi и логическому нулю при отрицательных, поступает на первые входы второго элемента "И" 12, второго элемента "ИЛИ-НЕ" 13 и третьего элемента "И" 16. На вторые входы второго элемента "И" 12 и второго элемента "ИЛИ-НЕ" 13 подаются сигналы с выхода пятой схемы сравнения 11. Сигналы, соответствующие логической единице при совпадении положительных знаков отсчетов hAi и hBi и соответствующие логическому нулю в остальных случаях, с выхода второго элемента "И" 12 поступают на первый вход третьего элемента "ИЛИ-НЕ" 14. На второй вход третьего элемента "ИЛИ-НЕ" 14 поступают с выхода второго элемента "ИЛИ-НЕ" 13 сигналы, соответствующие логической единице при совпадении отрицательных знаков отсчетов hAi и hBi и соответствующие логическому нулю в остальных случаях. На выходе третьего элемента "ИЛИ-НЕ" 14 получаются сигналы, соответствующие логической единице только при различных знаках отсчетов hAi и hBi. Эти сигналы на первый вход второго счетчика 15, который считает количество импульсов, соответствующих логической единице, т. е. определяют величину  . На второй вход второго счетчика 15 поступают управляющие сигналы. По управляющему сигналу, поступающему по окончании обрабатываемой реализации, содержимое счетчика подается на первый вход второго блока умножения 21 и затем для подготовки к следующему циклу измерений обнуляется.
. На второй вход второго счетчика 15 поступают управляющие сигналы. По управляющему сигналу, поступающему по окончании обрабатываемой реализации, содержимое счетчика подается на первый вход второго блока умножения 21 и затем для подготовки к следующему циклу измерений обнуляется.
На вход четвертой схемы сравнения 10 поступают задержанные на такт отсчеты колебаний поверхности моря в точке А hAi-1. Четвертая схема сравнения 10 сравнивает отсчеты с нулем, и на ее выходе, подключенном ко второму входу третьего элемента "И" 16, получаются сигналы, соответствующие логической единице, если отсчеты имеют отрицательный знак. На первый вход третьего элемента "И" 16 поступают сигналы, соответствующие логической единице при положительных отсчетах hAi. Таким образом, на выходе третьего элемента "И" 16 получаются импульсы, соответствующие логической единице при положительном отсчете hAi и отрицательном отсчете hAi-1. Это событие соответствует положительному переходу через средний уровень. Выход третьего элемента "И" 16 подключен к первому входу третьего счетчика 17, на второй вход которого подаются управляющие сигналы. Третий счетчик 17 считает количество импульсов, соответствующих положительным переходам N
Выход второго блока вычитания 22 подключен к первым входам второго и третьего регистров 23 и 27. По управляющему сигналу на вторых входах регистров 23 и 27, поданных с управляющего входа устройства 33, в оба регистра записывается величина подкоренного выражения (1 х), которая одновременно является нулевой итерацией при вычислении корня. Выходы второго и третьего регистров 23 и 27 соединены с первым и вторым входами второго блока деления 24, в котором определяется отношение (1 х)/ск на k-той итерации. Выход второго блока деления 24 соединен с первым входом сумматора 25. Его второй вход подключен к выходу третьего регистра 27. На первый вход сумматора 25 подается отношение (1 х)/сk на k-той итерации, а на второй - значение сk. На выходе сумматора 25 получается сумма этих величин. Выход сумматора 25 соединен со входом третьего блока деления 28, в памяти которого хранится делитель, равный двум. Выход третьего блока делителя 28 подключен к третьему входу третьего регистра 27. С выхода блока деления 28 очередная итерация с записывается в третьем регистре 27, и процесс вычисления продолжается до получения заданной точности. Результат записывается в регистр 27, и полученное значение  поступает с выхода регистра 27 на второй вход четвертого блока умножения 30. Таким образом, на выходе четвертого блока умножения 30 получается величина
поступает с выхода регистра 27 на второй вход четвертого блока умножения 30. Таким образом, на выходе четвертого блока умножения 30 получается величина  . Выход четвертого блока умножения 30 подключен ко входу четвертого блока вычитания 31, в котором хранится уменьшаемое, равное 1. На выходе четвертого блока вычитания 31 получается величина
. Выход четвертого блока умножения 30 подключен ко входу четвертого блока вычитания 31, в котором хранится уменьшаемое, равное 1. На выходе четвертого блока вычитания 31 получается величина  . Выход четвертого блока вычитания 31 подключен ко входу пятого блока умножения 32, в котором хранится значение множителя, равного π/2. На выходе пятого блока умножения 32 получается абсолютная величина угла γ, которая поступает на выход устройства 37.
. Выход четвертого блока вычитания 31 подключен ко входу пятого блока умножения 32, в котором хранится значение множителя, равного π/2. На выходе пятого блока умножения 32 получается абсолютная величина угла γ, которая поступает на выход устройства 37.
Таким образом, описанное устройство не содержит неизвестных ранее блоков и элементов и полностью реализует все операции в предложенном способе измерения направления распространения морских волн с летательного аппарата на плаву.
Из структурных схем фиг. 2 и 3 следует, что все блоки устройств, реализующих заявляемый способ, выполнены на типовых функциональных элементах вычислительной техники и поэтому способ может быть использован в авиационной промышленности. Способ и реализующие его устройства могут быть использованы в интересах океанологии, морской авиации, метеорологии и в других областях науки и техники, использующих информацию о состоянии морского волнения. Таким образом, заявляемый способ измерения статистических характеристик морского волнения с летательного аппарата удовлетворяет критериям патентоспособности по ст. 1 закона, т.е. является новым, имеет изобретательский уровень и промышленное применение и, следовательно, может быть защищен патентом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1996 |
|
RU2112925C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1992 |
|
RU2046287C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2000 |
|
RU2175111C1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ЧАСТОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2001 |
|
RU2196961C1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ЧАСТОТЫ МОРСКИХ ВОЛН | 2007 |
|
RU2337313C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ РАСПОЛОЖЕНИЯ ОБЪЕКТОВ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2349937C1 |
| СПОСОБ ИЗМЕРЕНИЯ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ С ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2012903C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2010 |
|
RU2439494C1 |
| СПОСОБ МАГНИТНОЙ РЕДУКЦИИ И ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД, РЕАЛИЗУЮЩИЙ ЕГО | 1994 |
|
RU2115228C1 |
Использование: в локационных способах определения статистических характеристик морского волнения. Сущность изобретения: способ измерения направления распространения морских волн предусматривает облучение поверхности импульсными сигналами и определение расстояния до водной поверхности, причем излучение сигналов осуществляется двумя приемо-излучающими системами, установленными на расстоянии, меньшем половины длины морских волн. Акселерометром измеряют вертикальные составляющие ускорений, по которым определяют вертикальные перемещения приемо-излучающей системы, что дает возможность оценить ординаты собственных колебаний морской поверхности, вероятность различных знаков этих колебаний и средний период. По полученным результатам вычисляют угол между продольной осью симметрии летательного аппарата и направлением распространения морских волн. 3 ил.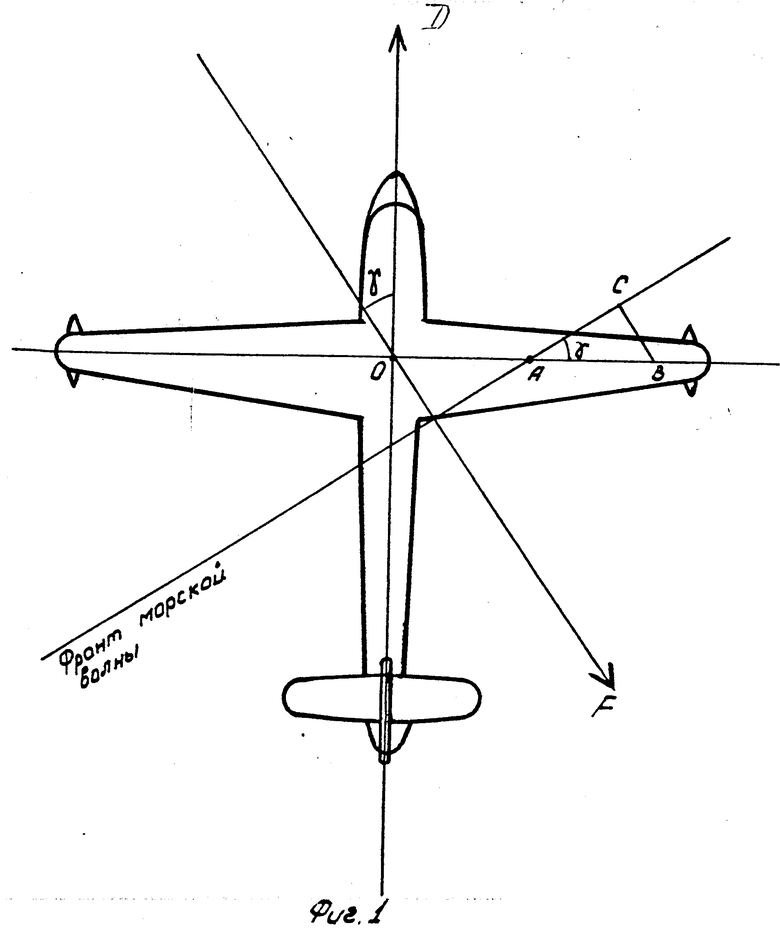
Способ измерения направления распространения морских волн с летательного аппарата на плаву, основанный на облучении морской поверхности импульсным сигналом, приеме отраженного сигнала и определении текущего расстояния до точки на морской поверхности по времени прихода отраженного сигнала, отличающийся тем, что с помощью дополнительно размещенной на летательном аппарате приемоизлучающей системы при нахождении летательного аппарата на плаву дополнительно определяют текущее расстояние до другой точки морской поверхности, причем вторая приемоизлучающая система размещается совместно с первой под крылом летательного аппарата на расстоянии от первой, меньшем половины длины морских волн, определяют собственные текущие вертикальные перемещения двух приемоизлучающих систем локатора путем анализа текущих значений ускорений, измеренных с помощью двух акселерометров, размещенных совместно с приемоизлучающими системами, а также определяют вертикальные перемещения морской поверхности в двух разнесенных точках относительно среднего уровня путем вычитания из текущего расстояния от каждой приемоизлучающей системы до поверхности его усредненного по множеству измерений значения и значения собственного перемещения каждой приемоизлучающей системы, определяют знаки вертикальных перемещений морской поверхности относительно среднего уровня под первой и второй приемоизлучающими системами, определяют вероятность различных знаков этих колебаний, измеряют средний период колебаний поверхности моря и вычисляют угол между продольной осью симметрии летательного аппарата и направлением распространения морских волн по формуле
где  знак угла γ;
знак угла γ; усредненная длина морских волн;
усредненная длина морских волн;
L расстояние между первой и второй приемоизлучающими системами; вероятность различных знаков колебаний морской поверхности под первой и второй приемоизлучающими системами;
вероятность различных знаков колебаний морской поверхности под первой и второй приемоизлучающими системами; ордината колебания морской поверхности под первой приемоизлучающей системой;
ордината колебания морской поверхности под первой приемоизлучающей системой; ордината колебания морской поверхности под второй приемоизлучающей системой;
ордината колебания морской поверхности под второй приемоизлучающей системой;
N количество отсчетов в пределах анализируемой реализации;
i индексы, соответствующие отсчетам в моменты времени, отделенные интервалом дискретизации;
g ускорение свободного падения;
Т средний период морского волнения.
| Способ определения расстояний до водной поверхности | 1983 |
|
SU1151819A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
