Предлагаемое изобретение относится к области неконтактных океанографических измерений и предназначено для использования в информационно-измерительных комплексах определения статических характеристик морского волнения с летательного аппарата на плаву.
Известен акустический способ определения высоты морских волн, (а. с. СССР N 412578, кл. G 01 S 9/66, 1974), состоящий в облучении поверхности воды акустической энергией и приеме отраженных сигналов, причем используются две приемоизлучающие системы, разнесенные по вертикали, которые возбуждают и принимают два тонально-импульсных акустических сигнала, относительная разность частот которых равна относительному вертикальному разнесению систем, фильтрации отраженных сигналов, выделению их огибающих и измерению частотно-пространственного в вертикальной плоскости коэффициента взаимной корреляции огибающих и нахождению после этого среднеквадратической высоты морских волн по формуле
где
B (f1, f2) - коэффициент взаимной корреляции; Δk - разность волновых чисел.
Недостатком этого способа является большая погрешность измерения высоты морских волн из-за невозможности размещения на летательном аппарате двух приемоизлучающих систем на значительно отличающихся высотах.
Известен способ определения расстояния до водной поверхности (авт. св. СССР N 1151819, кл. G 01 C 13/00, 1986, бюлл. ОИ N 15), использующий посылки на водную поверхность импульсов оптического излучения, прием отраженного сигнала и определение расстояния до водной поверхности по времени прихода отраженного сигнала, причем из отраженного сигнала выделяют спектр фотолюминесценции, который используют для определения расстояния.
Недостатком этого способа также является большая погрешность измерения высоты морских волн из-за вертикальных перемещений источника и приемника оптических импульсов, расположенных на летательном аппарате, находящемся на плаву, под действием морского волнения.
Наиболее близким по своей технической сущности к заявленному является способ измерения высоты морских волн с летательного аппарата на плаву (патент Российской Федерации N 2046287, кл. 6 G 01 C 13/00, 1995, бюлл. N 29), основанный на облучении морской поверхности импульсным сигналом, приеме отраженного сигнала и определения текущего расстояния до морской поверхности по времени приема отраженного сигнала и измерений с помощью размещенного рядом с приемоизлучающей системой акселерометра вертикальных ускорений приемоизлучающей системы, обусловленных действием морского волнения на приводненный летательный аппарат, по измеренным вертикальным ускорениям премоизлучающей системы определяют вертикальные составляющие ее скорости и соответствующие им вертикальные перемещений приемоизлучающей системы, вычитают значения полученных вертикальных перемещения из результатов определения текущего расстояния до морской поверхности и получают расстояние от морской поверхности до условно неподвижной точки, совпадающей с точкой размещения приемоизлучающей системы при отсутствии морского волнения, анализируют флуктуации текущих значений полученного расстояния через промежутки времени, равные принятому при измерении интервалу дискретизации, и определяют среднеквадратическое значение высоты морских волн.
Недостаток этого способа - большие погрешности при обработке результатов в темпе поступления информации вследствие искажений, возникающих при определении вертикальных составляющих скорости приемоизлучающей системы и соответствующих вертикальных перемещений.
Цель изобретения - повышение точности измерений при обработке результатов в темпе поступления информации. Это достигается тем, что в известном способе измерения высоты морских волн с летательного аппарата на плаву, использующем расположенные рядом приемоизлучающую систему, с помощью которой определяют расстояние до водной поверхности по времени задержки отраженного сигнала, и акселерометр, которым определяют вертикальные ускорения приемоизлучающей системы, обусловленные действием морского волнения на приводненный летательный аппарат, сигналы, соответствующие расстояниям до водной поверхности, фильтруют фильтром с передаточной функцией k (p), в полосу прозрачности которого попадает спектр колебаний морской поверхности, а сигналы акселерометра фильтруют фильтром с передаточной функцией  , где p - комплексная частота, вычитают сигналы с выходов обоих фильтров и получают сигналы, пропорциональные колебаниям морской поверхности, анализируя которые, находят высоту морских волн.
, где p - комплексная частота, вычитают сигналы с выходов обоих фильтров и получают сигналы, пропорциональные колебаниям морской поверхности, анализируя которые, находят высоту морских волн.
Техническая сущность предложенного способа заключается в следующем.
Колебания морской поверхности определяются разностью расстояния до морской поверхности h (t), измеряемой с помощью приемоизлучающей системы. Вертикальные перемещения приемоизлучающей системы получаются при анализе вертикального ускорения, измеряемого акселерометром, которое является функцией времени - a(t). Сущность анализа сводится к определению двойного интеграла функции a(t). Применим для анализа операторный метод. Оригиналу - функции a(t) соответствует изображение A(p), оригиналу функции, равной текущему расстоянию до морской поверхности h(t), соответствует изображение H(p). Двойному интегралу функции a(t) соответствует изображение  , где p - комплексная частота. Изображение колебаний морской поверхности получится равным
, где p - комплексная частота. Изображение колебаний морской поверхности получится равным
Следовательно, для того чтобы определить вертикальные перемещения приемоизлучающей системы, необходимо устройство с операторной передаточной функцией  . Такое устройство принципиально неустойчиво. Применение известных устройств, приближенно выполняющих интегрирование, приводит к большой погрешности в определении оригинала разности (1). Источниками этой погрешности являются амплитудно- и, особенно, фазово-частотные искажения интеграторов.
. Такое устройство принципиально неустойчиво. Применение известных устройств, приближенно выполняющих интегрирование, приводит к большой погрешности в определении оригинала разности (1). Источниками этой погрешности являются амплитудно- и, особенно, фазово-частотные искажения интеграторов.
В заявленном способе для уменьшения указанных погрешностей сигналы, соответствующие расстоянию до водной поверхности h(t), фильтруют фильтром с передаточной функцией k(p), в полосу прозрачности которого попадает спектр колебаний морской поверхности. Изображение сигнала на выходе фильтра равно
Y(p) = H(p) • K(p)
Сигналы на выходе акселерометра фильтруют фильтром с операторной передаточной функцией  и изображение сигнала на его выходе получается равным
и изображение сигнала на его выходе получается равным  . После вычитания получается сигнал, изображение которого
. После вычитания получается сигнал, изображение которого
Учитывая (1), получим
F(p) = K(p) • S'(p)
В области частот, совпадающей с полосой прозрачности фильтра и спектром морского волнения, спектральные плотности S(γω) и F(γω) совпадают.
Таким образом, в заявленном способе без определения вертикальных составляющих скорости приемоизлучающей системы благодаря дополнительной фильтрации сигналов, соответствующих расстоянию до водной поверхности при одновременной фильтрации сигналов акселерометра, полностью устраняются погрешности, связанные с амплитудно- и фазово-частотными искажениями при интегрировании. В отличие от прототипа не требуется для определения начального значения скорости регистрации в памяти всей выборки и сохранения в памяти обработанных элементов выборки. Это позволяет избавиться от памяти большой емкости. В прототипе для реализации способа требуется объем памяти для хранения 2 N чисел. При шаге дискретизации, равном 0,1 с, и длительности обрабатываемой реализации 15 мин в прототипе необходимо выполнить 2N = 1800 чисел. Предложенный способ не требует запоминания обрабатываемой реализации и обеспечивает возможность обработки результатов в темпе поступления информации.
Введенные новые операции, помещенные в отличительной части формулы изобретения, как и известные операции прототипа, относятся к существенным признакам и образуют их новую совокупность, так как находятся в причинно-следственной связи с достигаемым, более высоким, чем в прототипе результатом.
Для подтверждения возможности осуществления изобретения далее приведен пример реализации способа.
Простейшими передаточными функциями фильтров, удовлетворяющими формуле предполагаемого изобретения являются фильтры Баттерворта верхних и нижних частот второго порядка с передаточными функциями
где
ωc - частота среза, которая выбирается из условия обеспечения допустимого затухания на наименьшей частоте в спектре морского волнения. Это затухание определяется передаточной функцией k(ω) . При частоте среза ωc= 0,2 рад/c на частотах выше 0,5 рад/с затухание меньше 0,12 дБ. Спектр колебаний морской поверхности лежит в области частот 0,5 - 3 рад/с. Для таких колебаний целесообразно применить цифровую обработку.
Применив известную процедуру синтеза цифрового фильтра по аналоговому прототипу с помощью билинейного преобразования, получим рекуррентные формулы для определения откликов на выходах фильтров
yi = b1yi-1 - b2yi-2 + b3(hi - 2hi-1 + hi-2),
Zi = b1Zi-1 - b2Zi-2 + b4(ai + 2ai-1 + ai-2).
Здесь i = 0, 1, 2, 3...; y0 = 0; y1 = 0; Z0 = 0; Z1 = 0; hi = h(ti); ai = a(ti); ti - значения времени, определенные интервалом дискретизации T;
ωo - средняя частота в спектре морского волнения.
Приняв ωo= 1,4 рад/c; ωc= 0,2 рад/c ; T = 0,1 с, определим постоянные коэффициенты;
b1 = 1,9716722; b2 = 0,97206791; b3 = 0,98593504; b4 = 0,0024729118.
Разность значений yi и zi определяет отсчеты колебаний морской поверхности
fi= yi - zi
Упростить устройство можно, если вести вычисление yi в соответствии с алгоритмом yi = ui-2ui-1 + ui-2,
где ui = b1ui-1 - b2ui-2 + b3hi,
Аналогичным образом получим алгоритм для определения - zi
-zi= ωi+2ωi-1+ωi-2,
ωi= b1ωi-b2ωi-2-b4-b4ai.
Затем, суммируя yi и -zi, находим отсчеты колебаний морской поверхности fi.
Дисперсия колебаний морской поверхности определяется известной формулой
Среднеквадратическое значение высоты морских волн σ , как и в прототипе, определяется методом итерации в соответствии с равенством
На чертеже приведена структурная схема устройства для осуществления предложенного способа измерения высоты морских волн в соответствии с изобретением.
Устройство содержит акселерометр 1, аналого-цифровой преобразователь (АЦП) 2, первый блок умножения 3, блок ввода 4, второй, третий и четвертый блоки умножения 5, 6 и 7, первый сумматор 8, пятый и шестой блоки умножения 9 и 10, второй сумматор 11, первый, второй, третий и четвертый регистры 12, 13, 14 и 15, седьмой и восьмой блоки умножения 16 и 17, пятый регистр 18, третий сумматор 19, шестой регистр 20, первый и второй блоки деления 21 и 22, четвертый сумматор 23, первый блок воздействия в квадрат 24, пятый сумматор 25, второй блок воздействия в квадрат 26, блок вычитания 27, седьмой регистратор 28, третий блок деления 29, шестой сумматор 30, четвертый блок деления 31, восьмой регистр 32.
Выход 33 является выходом устройства, входы 34 и 35 являются соответственно информационным и управляющим входами.
Соответственно в устройстве акселерометр 1 определяет текущее значение ускорения в месте расположения приемоизлучающей системы; аналого-цифровой преобразователь 2 преобразует значения ускорения ai в моменты времени, отделенные интервалом дискретизации T, в цифровой код; первый блок умножения 3 предназначен для определения произведений - b4ai; блок ввода 4 служит для ввода в устройство отсчетов расстояния от морской поверхности до места расположения приемоизлучающей системы hi; второй блок умножения 5 предназначен для определения произведений b3hi; третий блок умножения 6 предназначен для определения произведения -b2ωi-2 ; четвертый блок умножения 7 предназначен для определения произведения b1ωi-1 ; первый сумматор 8 определяет величину ωi ; пятый блок умножения 9 предназначен для определения произведения - b2ui-2; шестой блок умножения 10 предназначен для определения произведения b1ui-1; второй сумматор 11 определяет величину ui; первый регистр 12 служит для записи и выдачи величины ωi-2 ; второй регистр 13 служит для записи и выдачи величины ωi-1 ; третий регистр 14 служит для записи и выдачи величины ui-2; четвертый регистр 15 служит для записи и выдачи величины ui-1; седьмой блок умножения 16 предназначен для определения произведения 2ωi-1 ; восьмой блок умножения 17 предназначен для определения произведения - 2ui-1; пятый регистр 18 осуществляет задержку суммы  на время T; третий сумматор 19 определяет отсчеты колебаний морской поверхности fi; шестой регистр 20 осуществляет задержку суммы
на время T; третий сумматор 19 определяет отсчеты колебаний морской поверхности fi; шестой регистр 20 осуществляет задержку суммы  на время T; первый блок деления 21 служит для определения величины
на время T; первый блок деления 21 служит для определения величины  ; второй блок деления 22 служит для определения величины
; второй блок деления 22 служит для определения величины  ; четвертый сумматор 23 вычисляет суммы
; четвертый сумматор 23 вычисляет суммы  ; первый блок возведения в квадрат 24 вычисляет значения f
; первый блок возведения в квадрат 24 вычисляет значения f ; второй блок воздействия в квадрат 26 вычисляет значения
; второй блок воздействия в квадрат 26 вычисляет значения  ; блок вычитания 27 служит для определения дисперсии колебаний морской поверхности D; седьмой регистр 28 служит для записи и хранения величины D; третий блок деления 29 служит для получения отношения
; блок вычитания 27 служит для определения дисперсии колебаний морской поверхности D; седьмой регистр 28 служит для записи и хранения величины D; третий блок деления 29 служит для получения отношения  при k - той итерации; шестой сумматор 30 определяет величину
при k - той итерации; шестой сумматор 30 определяет величину  ; четвертый блок деления 31 определяет величину σk+1 ; восьмой регистр 32 предназначен для хранения k - той итерации текущего значения σk и записей полученного решения σk+1 ; на выходе устройства 33 получаем высоту волн; на информационный вход 34 подаются сигналы, определяющие расстояние по водной поверхности; управляющий вход устройства 35 служит для подачи управляющих сигналов.
; четвертый блок деления 31 определяет величину σk+1 ; восьмой регистр 32 предназначен для хранения k - той итерации текущего значения σk и записей полученного решения σk+1 ; на выходе устройства 33 получаем высоту волн; на информационный вход 34 подаются сигналы, определяющие расстояние по водной поверхности; управляющий вход устройства 35 служит для подачи управляющих сигналов.
Устройство работает следующим образом.
Текущие значения ускорения a с выхода акселерометра 1, подключенного ко входу АЦП 2, преобразуются в цифровой код, соответствующий отсчетам ai в моменты времени, отделенные интервалом дискретизации T. Отсчеты подаются на вход первого блока умножения 3, в котором хранится значения сомножителя - b4. В результате перемножения на выходе блока получается произведение - b4ai, которое поступает на первый вход первого сумматора 8. На второй вход первого сумматора 8 поступают задержанные на время T вторым регистром 13 и умноженные четвертым блоком умножения 7 на коэффициент b1, хранящийся в самом блоке, сигналы ωic выхода первого сумматора 8. Таким образом, на второй вход первого сумматора 8 поступают значения b1ωi-1 . На третий вход первого сумматора 8 поступают задержанные на время первым регистром 12 и умноженные третьим блоком умножения 6 на коэффициент - b2, хранящийся в этом блоке, сигналы с выхода второго регистра 13. Следовательно, на третий вход первого сумматора 8 поступают значения -b2ωi-2 . В результате суммирования на выходе первого сумматора 8 получаются значения ωi= biωi-1-b2ωi-2b4ai ; которые поступают на первый вход третьего сумматора 19. На второй вход этого сумматора поступают с выхода второго регистра 13, через седьмой блок умножения 16, в котором хранится значение сомножителя, равное 2, произведения 2ωi-1 . На третий вход третьего сумматора 19 поступают с выхода первого регистра 12 значения ωi-2 .
Синхронно с выборками ускорения ai на вход второго блока умножения 5 через устройство ввода 4 с информационного входа 34 поступают отсчеты расстояния до морской поверхности hi. Во втором блоке умножения 5 хранится значение сомножителя b3 и на его выходе получаются произведения b3hi, которые поступают на первый вход второго сумматора 11. На второй вход этого сумматора поступают задержанные на время T четверым регистром 15 и умноженные шестым блоком умножения 10 на коэффициент b1, хранящийся в самом блоке, сигналы Ui с выхода второго сумматора 11. То есть, на второй вход сумматора 11 поступают значения b1Ui-1. На третий вход второго сумматора 11 поступают задержанные на время T третьим регистром 14 и умноженные пятым блоком умножения 9 на коэффициент - b2, хранящийся в этом блоке, сигналы с выхода четвертого регистра 15. Следовательно, на третий вход второго сумматора поступают значения -b2ui-2. В результате суммирования на выходе второго сумматора 11 получаются значения ui = b1ui-1 - b2ui-2 + b3hi, которые поступают на четвертый вход третьего сумматора 19. На его пятый вход поступают с выхода четвертого регистра 15, через восьмой блок умножения 17, в котором хранится значение сомножителя, равное -2, произведения -2ui-1. На шестой вход третьего сумматора 19 поступают с выхода третьего регистра 14 значения ui-2.
В результате суммирования слагаемых, поступающих на входы третьего сумматора 19. получаем на его выходе отсчеты колебаний морской поверхности fi, которые через первый блок возведения в квадрат 24 поступают на первый вход четвертого сумматора 23 и непосредственно на первый вход пятого сумматора 25. На выходе первого блока возведения в квадрат 24 получаются значения f , а на выходе пятого сумматора 25 - сумма
, а на выходе пятого сумматора 25 - сумма  . Указанные суммы с выхода четвертого сумматора 23 и с выхода пятого сумматора 25 поступают на первые входы второго блока деления 22 и первого блока деления 21, в которых хранится значение делителя N. По управляющему сигналу, поданному в момент времени, соответствующий концу обрабатываемой реализации NT, с входа 35 на вторые входы блоков деления 21 и 22, на их выходах получаются значения
. Указанные суммы с выхода четвертого сумматора 23 и с выхода пятого сумматора 25 поступают на первые входы второго блока деления 22 и первого блока деления 21, в которых хранится значение делителя N. По управляющему сигналу, поданному в момент времени, соответствующий концу обрабатываемой реализации NT, с входа 35 на вторые входы блоков деления 21 и 22, на их выходах получаются значения  соответственно. Выход первого блока деления 21 через второй блок возведения в квадрат соединен с первым входом блока вычитания 27, а выход второго блока деления 22 соединен с вторым входом блока вычитания непосредственно. На выходе блока вычитания 27 получается разность
соответственно. Выход первого блока деления 21 через второй блок возведения в квадрат соединен с первым входом блока вычитания 27, а выход второго блока деления 22 соединен с вторым входом блока вычитания непосредственно. На выходе блока вычитания 27 получается разность  , равная дисперсии D. Выход блока деления 27 соединен с входом седьмого регистра 28 и первым входом восьмого регистра 32, в которые записывается величина D, которая одновременно является нулевой итерацией решения. Выходы седьмого и восьмого регистров 28 и 32 соединены с первым и вторым входами третьего блока деления 29, в котором определяется отношение
, равная дисперсии D. Выход блока деления 27 соединен с входом седьмого регистра 28 и первым входом восьмого регистра 32, в которые записывается величина D, которая одновременно является нулевой итерацией решения. Выходы седьмого и восьмого регистров 28 и 32 соединены с первым и вторым входами третьего блока деления 29, в котором определяется отношение  на k - той итерации. Выход третьего блока деления 29 соединен с первым входом шестого сумматора 30. Его второй вход подключен к выходу восьмого регистра 32. На первый вход сумматора 30 подается отношение
на k - той итерации. Выход третьего блока деления 29 соединен с первым входом шестого сумматора 30. Его второй вход подключен к выходу восьмого регистра 32. На первый вход сумматора 30 подается отношение  k - той итерации, а на второй - значение σk . На выходе сумматора 30 получается сумма этих величин. Выход шестого сумматора 30 соединен с входом четвертого блока деления 31, в памяти которого хранится делитель, равный двум. Выход блока деления 31 подключен к второму входу восьмого регистра 32. С выхода блока деления 31 очередная итерация σ записывается в восьмом регистре 32 и процесс вычислений продолжается до получения заданной точности. Результат записывается в регистр 32 и полученное значение высоты волн σ поступает с выхода регистра 32 на выход устройства 33.
k - той итерации, а на второй - значение σk . На выходе сумматора 30 получается сумма этих величин. Выход шестого сумматора 30 соединен с входом четвертого блока деления 31, в памяти которого хранится делитель, равный двум. Выход блока деления 31 подключен к второму входу восьмого регистра 32. С выхода блока деления 31 очередная итерация σ записывается в восьмом регистре 32 и процесс вычислений продолжается до получения заданной точности. Результат записывается в регистр 32 и полученное значение высоты волн σ поступает с выхода регистра 32 на выход устройства 33.
Таким образом, описанное устройство не содержит неизвестных ранее блоков и элементов и полностью реализует все операции в предложенном способе определения высоты морских волн.
Благодаря введению новых функционально связанных в соответствии с формулой изобретения операций фильтрации сигналов двух датчиков уменьшается погрешность определения высоты морских волн при обработке результатов в темпе поступления информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2000 |
|
RU2175111C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ РАСПРОСТРАНЕНИЯ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1993 |
|
RU2092792C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1992 |
|
RU2046287C1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ЧАСТОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2001 |
|
RU2196961C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2010 |
|
RU2439494C1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ЧАСТОТЫ МОРСКИХ ВОЛН | 2007 |
|
RU2337313C2 |
| СПОСОБ ИЗМЕРЕНИЯ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ С ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2012903C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2104563C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН | 2004 |
|
RU2281461C2 |
Способ предназначен для неконтактных органографических измерений. Измерение высоты морских волн с летательного аппарата на плаву определяют с помощью расположенных рядом приемо- излучающей системы и акселерометра расстояния до водной поверхности и вертикальные ускорения. Сигналы, соответствующие расстояниям до водной поверхности, фильтруют фильтром с передаточной функцией К(р), в полосу пропускания которого попадает спектр колебаний морской поверхности, а сигналы акселерометра фильтруют фильтром с передаточной функцией К(р), где р - комплексная частота. После вычитания сигналов обоих фильтров получают сигналы, пропорциональные колебаниям морской поверхности, анализируя которые, находят высоту морских волн. Повышена точность измерений при обработке результатов в темпе поступления информации. 1 ил.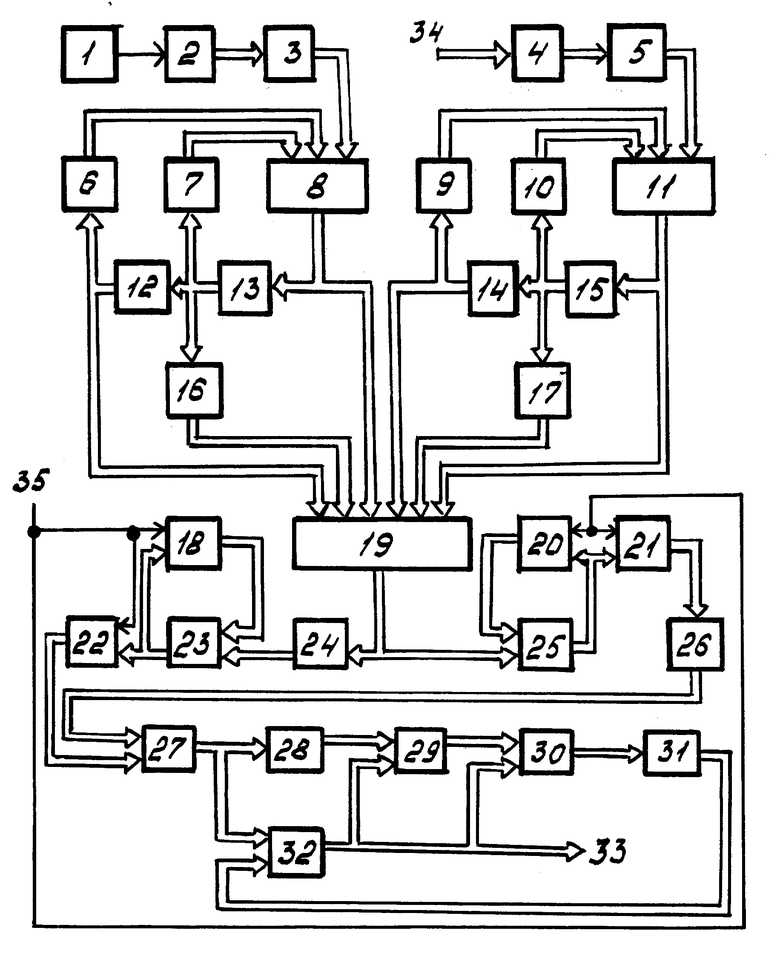
Способ измерения высоты морских волн с летательного аппарата на плаву, согласно которому определяют расстояние до водной поверхности по времени задержки отраженного сигнала с помощью совместно расположенной приемоизлучающей системы, определяют вертикальные ускорения приемоизлучающей системы, обусловленные действием морского волнения на приводненный летательный аппарат, с помощью акселерометра, вычитают сигналы и, анализируя сигналы, пропорциональные колебаниям морской поверхности, находят высоту морских волн, отличающийся тем, что сигнал, соответствующий расстоянию до водной поверхности, фильтруют фильтром с передаточной функцией K (p), в полосу прозрачности которого попадает спектр колебаний морской поверхности, а сигнал акселерометра фильтруют фильтром с передаточной функцией  где p - комплексная частота, при этом вычитают сигналы с выходов обоих фильтров.
где p - комплексная частота, при этом вычитают сигналы с выходов обоих фильтров.
