Предлагаемое изобретение относится к области океанографических измерений и предназначено для использования в информационно-измерительных комплексах определения статистических характеристик морского волнения.
Известен способ определения средней частоты морских волн с летательного аппарата в полете на постоянной высоте (описанный в книге: Гарнакерьян А.А., Сосунов А.С. Радиолокация морской поверхности, Ростов-на-Дону; изд-во Ростовского университета, 1978, с.113-119), использующий бортовой коротковолновый импульсный радиолокатор с антенной, жестко связанной с летательным аппаратом, направленный к морской поверхности и имеющий широкую диаграмму направленности, при этом из последовательности эхо-сигналов от морской поверхности выделяют их центрированную огибающую, при переходе которой через нулевой уровень формируют последовательность импульсов, усредненная частота следования которых пропорциональна средней частоте морских волн, увеличивают период следования этой последовательности импульсов пропорционально скорости полета и преобразуют их в напряжение, пропорциональное усредненному периоду повторения импульсов, обратно пропорциональному средней частоте морских волн.
Признаки, совпадающие с заявляемым объектом: определение средней частоты морских волн.
Причинами, препятствующими получению требуемого технического результата, являются: большая погрешность при измерении очень низких частот сигналов, пропорциональных колебаниям морской поверхности.
Известен способ определения средней частоты морских волн (Патент РФ №2092792, МКИ 6 G01С 13/00, БИ №28, 1997), основанный на облучении морской поверхности импульсным сигналом, приеме отраженного сигнала, определении текущего расстояния до морской поверхности по времени приема отраженного сигнала и измерении с помощью размещенного рядом с приемоизлучающей системой акселерометра вертикальных ускорений приемоизлучающей системы, обусловленных действием морского волнения на приводненный летательный аппарат, по известным ускорениям определяют скорость и вертикальные перемещения приемопередающей системы, что позволяет определить ординаты собственных колебаний морской поверхности, и путем подсчета количества положительных переходов колебаний поверхности через средний уровень за время реализации и вычисления отношения длительности реализации к количеству переходов находят усредненный период, обратно пропорциональна которому средняя частота.
Признаки, совпадающие с заявленным объектом: получение сигналов, пропорциональных колебаниям морской поверхности.
Причиной, препятствующей получению требуемого технического результата, является невозможность обработки результатов измерений в темпе поступления информации в связи с тем, что минимальное время, за которое может быть проведена оценка изменения средней частоты, равно длительности обрабатываемой реализации, которая для получения нужной точности измерений равна 15 мин.
Наиболее близким по своей технической сущности к заявляемому является способ измерения средней частоты морских волн (патент РФ №2196961, МКИ G01С 13/00, БИ №2, 2003), основанный на измерении колебаний уровня морской поверхности, обработке результатов парой цепей с равными единице коэффициентами передачи и разностью сдвигов фаз, близкой к 90°, с последующим вычислением произведений значений сигналов на выходе одной цепи на значение производной сигнала на выходе другой, определении разности полученных произведений, деление которой на сумму квадратов сигналов на выходах цепей и усреднение результатов позволяет получить среднее значение частоты морских волн.
Признаками, совпадающими с существенными признаками заявляемого изобретения, являются: определение сигналов, пропорциональных колебаниям морской поверхности, и обработка результатов парой цепей с равными единице коэффициентами передачи и разностью сдвигов фаз, близкой к 90°.
Причиной, препятствующей получению требуемого технического результата, является большая погрешность при определении производных сигналов, пропорциональных колебаниям морской поверхности.
Задача, на решение которой направлено заявляемое изобретение, - разработка способа измерения средней частоты морских волн без определения производных.
Технический результат предложенного способа заключается в том, что увеличивается точность измерений, так как средняя за промежуток времени, равный интервалу дискретизации, частота находится без определения производных, поэтому возможно увеличение шага дискретизации при определении колебаний морской поверхности до максимально возможной в соответствии с теоремой Котельникова величины T, равной 1 сек.
Технический результат достигается тем, что известный способ, согласно которому сигналы, пропорциональные колебаниям морской поверхности, обрабатывают парой цепей, разность сдвигов фаз которых близка к 90°, и определяют сигналы на выходах цепей, дополняется тем, что определяют делимое, равное разности произведений сигналов с выхода одной цепи на задержанные на время усреднения сигналы с выхода другой, затем делимое делят на делитель, равный сумме произведений сигналов с выходов цепей на задержанные сигналы одноименных цепей, определяют обратный тригонометрический тангенс отношения и, если делитель отрицательный, прибавляют π, результат делят на время усреднения и получают среднюю частоту морских волн.
Анализ заявляемого способа и сравнение его с прототипом позволяют выявить следующие новые признаки: определение делимого, равного разности произведений сигналов на выходе одной цепи на задержанные на время усреднения сигналы с выхода другой, деление на делитель, равный сумме произведений сигналов на выходах цепей на задержанные сигналы одноименных цепей, определение обратного тригонометрического тангенса отношения, если делитель отрицательный, сложение результата с π, деление результата на время усреднения и получение средней частоты морских волн.
Наличие новых признаков позволяет сделать вывод о соответствии заявляемого способа критериям «новизна», «изобретательский уровень» и "промышленная применимость".
Возможность достижения технического результата обусловлена следующими теоретическими положениями: сигналы, пропорциональные колебаниям морской поверхности, поступают на входы пары цепей с коэффициентами передачи, равными единице. В пределах ширины спектра морского волнения (0,05-0,5 Гц) фазовые характеристики этих цепей отличаются на 90°. Сигналы на выходах цепей получаются сопряженными по Гильберту (см., например, книгу Гоноровский И.С., Демин М.П. Радиотехнические цепи и сигналы. М.: Радио и связь, 1994). Энергетические спектры на входе и выходах цепей совпадают, следовательно, не отличаются и средние частоты. Сопряженные по Гильберту сигналы x(t) и y(t), позволяют найти аналитический сигнал z(t)=x(t)+jy(t), аргумент которого - полная фаза ψ(t), a частота определяется, как производная фазы

Средняя частота за интервал времени, равный шагу дискретизации Т, равна

Подставив в (1) формулу (2), получим
После интегрирования получим формулу  , которая после подстановки
, которая после подстановки  примет вид:
примет вид:

Используя известные соотношения между круговыми функциями, после преобразований определим среднюю частоту в пределах времени усреднения, равного шагу дискретизации Т, так:

Средняя частота в пределах большего, чем шаг дискретизации, интервала τ может быть определена, как в прототипе
Усреднение выполняется с помощью фильтра нижних частот.
Среднюю частоту Ω можно найти через произвольные промежутки времени, превышающие шаг дискретизации. Естественно, что динамический диапазон изменений средней частоты меньше, чем мгновенной. Это позволяет уменьшить погрешность измерений. Кроме того, в предложенном устройстве отсутствует необходимость определения производных сигнала. Применение дифференцирующих цепей вносит дополнительную погрешность, которая при данном способе определения средней частоты отсутствует.
Для подтверждения данного способа далее приведен пример реализации устройства на его основе.
Пара дискретных цепей с коэффициентами передачи, равными единице, разность сдвигов фаз которых при десятикратном отношении максимальной и минимальной частот, отличается от 90° не более чем на 1°, имеет системные функции:

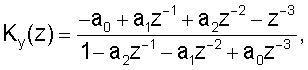
где a0=0,118, a1=0,47, a2=0,497.
При подаче на входы цепей с такими системными функциями выборок колебаний морской поверхности si, отделенных интервалом времени Т, получим на выходах отклики:


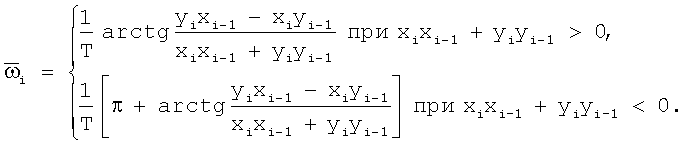
Выборки средней частоты за интервал времени, равный шагу дискретизации T, равны:
Аппроксимация круговой функции с учетом ее симметрии дробным рациональным выражением позволяет с максимальной погрешностью меньше 2% определить произведение
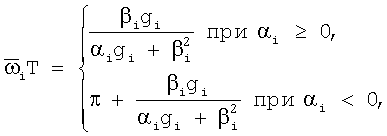
где 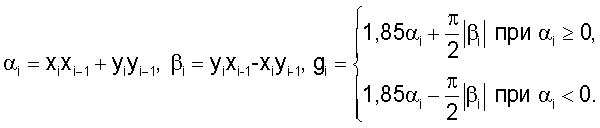
Усреднение частоты за интервал времени, превышающий шаг дискретизации, выполняется, как в прототипе, с помощью рекурсивного фильтра первого порядка с полосой пропускания 5×10-4 Гц и постоянной времени, примерно равной 300 сек. Системная функция фильтра равна
где  и b=0,997. При таком выборе коэффициента а при воздействии на входе фильтра отсчетов, равных произведениям
и b=0,997. При таком выборе коэффициента а при воздействии на входе фильтра отсчетов, равных произведениям  , на выходе получаются значения средней частоты Fi в Гц. Соответствующий алгоритм выглядит так
, на выходе получаются значения средней частоты Fi в Гц. Соответствующий алгоритм выглядит так
Fi=aθi+bFi-1.
На чертеже приведена структурная схема устройства для осуществления предложенного способа измерения средней частоты морских волн в соответствии с предлагаемым изобретением.
Устройство содержит: первый и второй сумматоры 1 и 2, первый, второй и третий регистры 3, 4 и 5, первый и второй блоки умножения 6 и 7, третий и четвертый сумматоры 8 и 9, четвертый, пятый и шестой регистры 10, 11 и 12, третий и четвертый блоки умножения 13 и 14, пятый и шестой сумматоры 15 и 16, седьмой, восьмой и девятый регистры 17, 18 и 19, пятый и шестой блоки умножения 20 и 21, седьмой и восьмой сумматоры 22 и 23, седьмой блок умножения 24, девятый сумматор 25, восьмой, девятый и десятый блоки умножения 26, 27 и 28, блок вычитания 29, блок возведения в квадрат 30, первую и вторую схемы сравнения 31 и 32, одиннадцатый блок умножения 33, десятый сумматор 34, десятый регистр 35, двенадцатый, тринадцатый и четырнадцатый блоки умножения 36, 37 и 38, одиннадцатый сумматор 39, пятнадцатый и шестнадцатый блоки умножения 40 и 41, двенадцатый сумматор 42, семнадцатый блок умножения 43, блок деления 44, тринадцатый сумматор 45, восемнадцатый блок умножения 46.
Выход 47 является выходом устройства и его информационный вход 48.
Соответственно, в устройстве первый сумматор 1 определяет сумму si+xi-3; второй сумматор 2 вычисляет сумму si+yi-3; первый регистр 3 записывает и выдает величину хi-3; второй регистр 4 записывает и выдает величину si-1; третий регистр 5 записывает и выдает величину yi-3; первый блок умножения 6 вычисляет значение a0(si+хi-3); второй блок умножения 7 вычисляет значение - a0(si+yi-3); третий сумматор 8 вычисляет сумму si-1+xi-2; четвертый сумматор 9 вычисляет сумму si-1+yi-2; четвертый регистр 10 записывает и выдает величину хi-2, пятый регистр 11 записывает и выдает величину si-2; шестой регистр 12 записывает и выдает величину уi-2; третий блок умножения 13 вычисляет значение a1(si-1+xi-2); четвертый блок умножения 14 вычисляет значение a1(si-1+yi-2), пятый сумматор 15 вычисляет сумму si-2+xi-1; шестой сумматор 16 вычисляет сумму si-2+yi-1; седьмой регистр 17 записывает и выдает величину xi-1; восьмой регистр 18 записывает и выдает величину si-3; девятый регистр 19 записывает и выдает величину yi-1; пятый блок умножения 20 вычисляет значение - a2(si-2+xi-1); шестой блок умножения 21 вычисляет значение a2(si-2+yi-1); седьмой сумматор 22 определяет величину хi; восьмой сумматор 23 определяет величину yi; седьмой блок умножения 24 вычисляет произведение хiхi-1; девятый сумматор 25 определяет величину βi; восьмой блок умножения 26 вычисляет произведение yiyi-1; девятый блок умножения 27 вычисляет произведение хiyi-1; десятый блок умножения 28 вычисляет произведение yixi-1; блок вычитания 29 определяет величину αi; блок возведения в квадрат 30 вычисляет  ; первая схема сравнения 31 определяет знак βi; вторая схема сравнения 32 определяет знак αi; одиннадцатый блок умножения 33 вычисляет произведение αigi; десятый сумматор 34 вычисляет величину
; первая схема сравнения 31 определяет знак βi; вторая схема сравнения 32 определяет знак αi; одиннадцатый блок умножения 33 вычисляет произведение αigi; десятый сумматор 34 вычисляет величину  ; десятый регистр 35 записывает и выдает величину Fi-1; двенадцатый блок умножения 36 определяет абсолютное значение
; десятый регистр 35 записывает и выдает величину Fi-1; двенадцатый блок умножения 36 определяет абсолютное значение  ; тринадцатый блок умножения 37 определяет произведение 1,85αi; четырнадцатый блок умножения 38 определяет произведение bFi-1; одиннадцатый сумматор 39 определяет значения средней частоты Fi; пятнадцатый блок умножения 40 определяет значение
; тринадцатый блок умножения 37 определяет произведение 1,85αi; четырнадцатый блок умножения 38 определяет произведение bFi-1; одиннадцатый сумматор 39 определяет значения средней частоты Fi; пятнадцатый блок умножения 40 определяет значение  ; шестнадцатый блок умножения 41 определяет второе слагаемое в формуле для определения gi, равное
; шестнадцатый блок умножения 41 определяет второе слагаемое в формуле для определения gi, равное  ; двенадцатый сумматор 42 определяет значение gi; семнадцатый блок умножения 43 определяет произведение βigi; блок деления 44 определяет частное от деления
; двенадцатый сумматор 42 определяет значение gi; семнадцатый блок умножения 43 определяет произведение βigi; блок деления 44 определяет частное от деления  ; тринадцатый сумматор 45 определяет значения θi; восемнадцатый блок умножения 46 определяет произведение аθi; на выходе устройства 47 получаем значения средней частоты морских волн; на информационный вход 48 подаются сигналы, соответствующие колебаниям морской поверхности.
; тринадцатый сумматор 45 определяет значения θi; восемнадцатый блок умножения 46 определяет произведение аθi; на выходе устройства 47 получаем значения средней частоты морских волн; на информационный вход 48 подаются сигналы, соответствующие колебаниям морской поверхности.
Устройство работает следующим образом.
Цифровые сигналы si, соответствующие колебаниям морской поверхности, поступают с информационного входа 48 с интервалом времени Т на первые входы первого и второго сумматоров 1 и 2, а также вход второго регистра 4. Задержанные вторым регистром на один такт Т сигналы si-1 поступают на пятый регистр 11 и на первые входы третьего 8 и четвертого 9 сумматоров. Задержанные на такт пятым регистром сигналы si-2 поступают на восьмой регистр 18 и на первые входы пятого 15 и шестого сумматоров 16. Задержанные восьмым регистром на такт сигналы si-3 поступают на первые инвертирующие входы седьмого 22 и восьмого 23 сумматоров.
С выхода седьмого сумматора сигналы хi задерживаются на такт седьмым регистром 17, поступают на второй вход пятого сумматора 15, складываются с сигналами на его первом входе и умножаются пятым блоком умножения 20 на коэффициент - а2, хранящийся в блоке. Таким образом, на выходе седьмого регистра получаются сигналы хi-1, на выходе пятого сумматора - сигналы равные si-2+хi-1, и на выходе пятого блока умножения - сигналы равные - a2(si-2+xi-1), которые поступают на второй вход седьмого сумматора 22. С выхода седьмого регистра 17 сигналы также поступают на четвертый регистр 10, с выхода которого задержанные на один такт сигналы xi-2 поступают на второй вход третьего сумматора 8, где складываются с сигналами на первом входе. Полученная сумма умножается третьим блоком умножения 13 на коэффициент a1, хранящийся в блоке, и подается на третий вход седьмого сумматора 22. Так на выходе третьего сумматора получаются сигналы si-1+xi-2, а на выходе третьего блока умножения и третьем входе седьмого сумматора сигналы a1(si-1+хi-2). С выхода четвертого регистра сигналы поступают и на первый регистр 3. На выходе первого регистра получаются сигналы, задержанные еще на такт хi-3. Они подаются на второй вход первого сумматора 1, складываются с сигналами на его первом входе, а затем первым блоком умножения 6 умножаются на хранящийся в блоке множитель a0 и поступают на четвертый вход седьмого сумматора 22. На выходе первого сумматора и входе первого блока умножения получаются сигналы si+xi-3, а на выходе первого блока умножения и четвертом входе седьмого сумматора - сигналы a0(si+хi-3). Седьмой сумматор складывает сигналы, поступающие на второй, третий и четвертый входы, и вычитает сигнал на первом, инвертирующем входе. Сигнал на его выходе равен xi.
С выхода восьмого сумматора сигналы уi задерживаются на такт девятым регистром 19, поступают на второй вход шестого сумматора 16 и умножаются шестым блоком умножения 21 на коэффициент а2, хранящийся в блоке. Таким образом, на выходе девятого регистра получаются сигналы yi-1, на выходе шестого сумматора - сигналы, равные si-2+yi-1, и на выходе шестого блока умножения - сигналы, равные a2(si-2+yi-1), которые поступают на второй вход восьмого сумматора 23. С выхода девятого регистра 19 сигналы также поступают на шестой регистр 12. С его выхода задержанные на один такт сигналы yi-2 поступают на второй вход четвертого сумматора 9. Четвертым сумматором складываются с сигналом на первом входе, умножаются четвертым блоком умножения 14 на коэффициент аi, хранящийся в блоке, и подаются на третий вход восьмого сумматора 23. Так на выходе четвертого сумматора получаются сигналы si-1+yi-2, а на выходе четвертого блока умножения и третьем входе восьмого сумматора сигналы a1(si-1+yi-2). С выхода шестого регистра сигналы поступают и на третий регистр 5. На выходе третьего регистра получаются сигналы, задержанные еще на такт yi-3. Они подаются на второй вход второго сумматора 2, а затем складываются с сигналом на его первом входе и вторым блоком умножения 7 умножаются на хранящийся в блоке множитель - а0, после чего поступают на четвертый вход восьмого сумматора 23. На выходе второго сумматора и входе второго блока умножения получаются сигналы si+yi-3, а на выходе второго блока умножения и четвертом входе восьмого сумматора - сигналы, равные - a0(si+yi-3). Восьмой сумматор складывает сигналы, поступающие на второй, третий и четвертый входы, и вычитает сигнал на первом, инвертирующем входе. Сигнал на его выходе равен yi.
Сигналы с выхода седьмого сумматора хi и он же, задержанный на такт седьмым регистром xi-1, поступают на первый и второй входы седьмого блока умножения 24, с выхода которого произведение хiхi-1 подается на первый вход девятого сумматора 25. На второй вход девятого сумматора с выхода восьмого блока умножения 26 поступает произведение сигналов, подаваемых на его входы, с выхода восьмого сумматора уi и сигнал, задержанный девятым регистром на один такт yi-1. Произведение равно yiyi-1. Таким образом, на выходе девятого сумматора получается сумма, равная αi=хiхi-1+yiyi-1.
С выхода седьмого сумматора сигналы xi и с выхода девятого регистра сигналы yi-1 поступают на входы девятого блока умножения 27. На его выходе получается произведение хiyi-1, которое поступает на первый вход блока вычитания 29 и является вычитаемым. С выхода восьмого сумматора сигналы yi и с выхода седьмого регистра сигналы хi-1 поступают на входы десятого блока умножения 28. На его выходе получается произведение yiхi-1, которое поступает на второй вход блока вычитания и является уменьшаемым. На выходе блока вычитания получается разность, равная βi=yiхi-1-хiyi-1. Эта величина поступает на вход первой схемы сравнения 31 и информационный вход двенадцатого блока умножения 36. Схема сравнения сравнивает поступающие на ее вход значения с нулем и дает возможность при отрицательных значениях получить сигнал, соответствующий логической единице, в противном случае - логическому нулю. С выхода схемы сравнения сигналы поступают на управляющий вход двенадцатого блока умножения. Логическая единица на управляющем входе приводит к умножению на - 1 сигнала на информационном входе двенадцатого блока умножения. В противном случае множитель равен 1 и на выходе двенадцатого блока умножения получается абсолютное значение  , которое поступает на вход пятнадцатого блока умножения 40, где умножается на хранящийся в самом блоке множитель
, которое поступает на вход пятнадцатого блока умножения 40, где умножается на хранящийся в самом блоке множитель  . Произведение
. Произведение  поступает на информационный вход шестнадцатого блока умножения 41. На управляющий вход шестнадцатого блока умножения поступают либо логический ноль, либо логическая единица с выхода второй схемы сравнения 32, вход которой подключен к выходу девятого сумматора. Сигналы αi с выхода этого сумматора во второй схеме сравнения сравниваются с нулем и, если αi отрицательные, на выходе схемы сравнения получается логическая единица, которая, поступая на управляющий вход шестнадцатого блока умножения, приводит к умножению содержимого на -1. В противном случае множитель равен единице. С выхода шестнадцатого блока умножения сигналы поступают на первый вход двенадцатого сумматора 42. На второй вход этого сумматора поступают через тринадцатый блок умножения 37 сигналы с выхода девятого сумматора. Тринадцатый блок умножения умножает сигналы αi на число 1,85, хранящийся в самом блоке. Таким образом, на выходе двенадцатого сумматора получаются сигналы, равные gi. Эти сигналы поступают на первые входы одиннадцатого и семнадцатого блоков умножения 33 и 43 соответственно. На второй вход одиннадцатого блока умножения 33 поступают сигналы αi с выхода девятого сумматора, а на второй вход семнадцатого блока умножения - сигналы βi с выхода блока вычитания. На выходах одиннадцатого и семнадцатого блоков умножения соответственно получаются произведения giαi и giβi. С выхода одиннадцатого блока умножения сигналы поступают на первый вход десятого сумматора 34. На второй вход этого сумматора подаются через блок возведения в квадрат 30 сигналы с выхода блока вычитания. Следовательно, на втором входе десятого сумматора действуют сигналы
поступает на информационный вход шестнадцатого блока умножения 41. На управляющий вход шестнадцатого блока умножения поступают либо логический ноль, либо логическая единица с выхода второй схемы сравнения 32, вход которой подключен к выходу девятого сумматора. Сигналы αi с выхода этого сумматора во второй схеме сравнения сравниваются с нулем и, если αi отрицательные, на выходе схемы сравнения получается логическая единица, которая, поступая на управляющий вход шестнадцатого блока умножения, приводит к умножению содержимого на -1. В противном случае множитель равен единице. С выхода шестнадцатого блока умножения сигналы поступают на первый вход двенадцатого сумматора 42. На второй вход этого сумматора поступают через тринадцатый блок умножения 37 сигналы с выхода девятого сумматора. Тринадцатый блок умножения умножает сигналы αi на число 1,85, хранящийся в самом блоке. Таким образом, на выходе двенадцатого сумматора получаются сигналы, равные gi. Эти сигналы поступают на первые входы одиннадцатого и семнадцатого блоков умножения 33 и 43 соответственно. На второй вход одиннадцатого блока умножения 33 поступают сигналы αi с выхода девятого сумматора, а на второй вход семнадцатого блока умножения - сигналы βi с выхода блока вычитания. На выходах одиннадцатого и семнадцатого блоков умножения соответственно получаются произведения giαi и giβi. С выхода одиннадцатого блока умножения сигналы поступают на первый вход десятого сумматора 34. На второй вход этого сумматора подаются через блок возведения в квадрат 30 сигналы с выхода блока вычитания. Следовательно, на втором входе десятого сумматора действуют сигналы  и на его выходе получаются значения
и на его выходе получаются значения  , которые являются делителем и поступают на первый вход блока деления 44. На его второй вход поступает делимое с выхода семнадцатого блока умножения и на выходе получается частное от деления , которое поступает на информационный вход тринадцатого сумматора 45. Управляющий вход тринадцатого сумматора подключен ко второй схеме сравнения. При отрицательных значениях αi логическая единица на входе сумматора приводит к суммированию сигналов на первом входе со значением π, хранящимся в сумматоре. В противном случае сигнал на выходе тринадцатого сумматора совпадает с сигналом на информационном входе. На выходе тринадцатого сумматора получаются значения θi, поступающие через восемнадцатый блок умножения 46, в котором сигналы умножаются на хранящийся в блоке коэффициент а, на первый вход одиннадцатого сумматора 39. На второй вход одиннадцатого сумматора поступают сигналы с его выхода, задержанные на такт десятым регистром 35 и умноженные четырнадцатым блоком умножения 38 на хранящийся в этом блоке коэффициент 0,997. Таким образом, на выходе одиннадцатого сумматора получаются значения средней частоты Fi, поступающие на выход устройства 47.
, которые являются делителем и поступают на первый вход блока деления 44. На его второй вход поступает делимое с выхода семнадцатого блока умножения и на выходе получается частное от деления , которое поступает на информационный вход тринадцатого сумматора 45. Управляющий вход тринадцатого сумматора подключен ко второй схеме сравнения. При отрицательных значениях αi логическая единица на входе сумматора приводит к суммированию сигналов на первом входе со значением π, хранящимся в сумматоре. В противном случае сигнал на выходе тринадцатого сумматора совпадает с сигналом на информационном входе. На выходе тринадцатого сумматора получаются значения θi, поступающие через восемнадцатый блок умножения 46, в котором сигналы умножаются на хранящийся в блоке коэффициент а, на первый вход одиннадцатого сумматора 39. На второй вход одиннадцатого сумматора поступают сигналы с его выхода, задержанные на такт десятым регистром 35 и умноженные четырнадцатым блоком умножения 38 на хранящийся в этом блоке коэффициент 0,997. Таким образом, на выходе одиннадцатого сумматора получаются значения средней частоты Fi, поступающие на выход устройства 47.
Описанное устройство не содержит не известных ранее блоков и элементов и полностью реализует все операции в предложенном способе определения средней частоты морских волн.
Благодаря введению новых операций: определению разности произведений сигналов на выходе одной цепи на задержанные на время усреднения сигналы с выхода другой, делению на сумму произведений сигналов с выходов цепей на задержанные сигналы одноименных цепей, определению обратного тригонометрического тангенса отношения, прибавлению π при отрицательном делителе и делению результата на время усреднения, уменьшается динамический диапазон обрабатываемых сигналов, исчезает необходимость определения производных и в связи с этим увеличивается точность определения средней частоты морских волн.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ЧАСТОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2001 |
|
RU2196961C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2000 |
|
RU2175111C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1996 |
|
RU2112925C1 |
| АРИФМЕТИЧЕСКОЕ УСТРОЙСТВО | 2004 |
|
RU2268482C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ РАСПОЛОЖЕНИЯ ОБЪЕКТОВ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2349937C1 |
| Устройство для определения взаимной корреляционной функции | 1983 |
|
SU1108463A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН | 2004 |
|
RU2281461C2 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КРАЕВ ДЛЯ СИСТЕМЫ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 1991 |
|
RU2020582C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ РАСПРОСТРАНЕНИЯ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1993 |
|
RU2092792C1 |
| Автокорреляционный измеритель параметров псевдослучайного фазоманипулированного сигнала | 1990 |
|
SU1823137A1 |
Изобретение относится к области океанографических измерений, в частности к способам измерения средней частоты морских волн. Технический результат - повышение точности измерений. Для достижения данного результата сигналы, пропорциональные колебаниям морской поверхности, обрабатывают парой цепей с коэффициентами передачи, равными единице. Разность сдвигов фаз цепей близка к 90°. Определяют произведения сигналов на выходе одной цепи на задержанные на время усреднения сигналы с выхода другой. Находят делимое, равное разности произведений, полученных для обеих цепей. На выходах цепей находят произведения сигналов и тех же задержанных сигналов. После суммирования результатов получается делитель. Определяют отношение делимого и делителя. Находят обратный тригонометрический тангенс отношения, если делитель отрицательный, прибавляют π. Результат делят на время усреднения и получают среднюю частоту морских волн. 1 ил.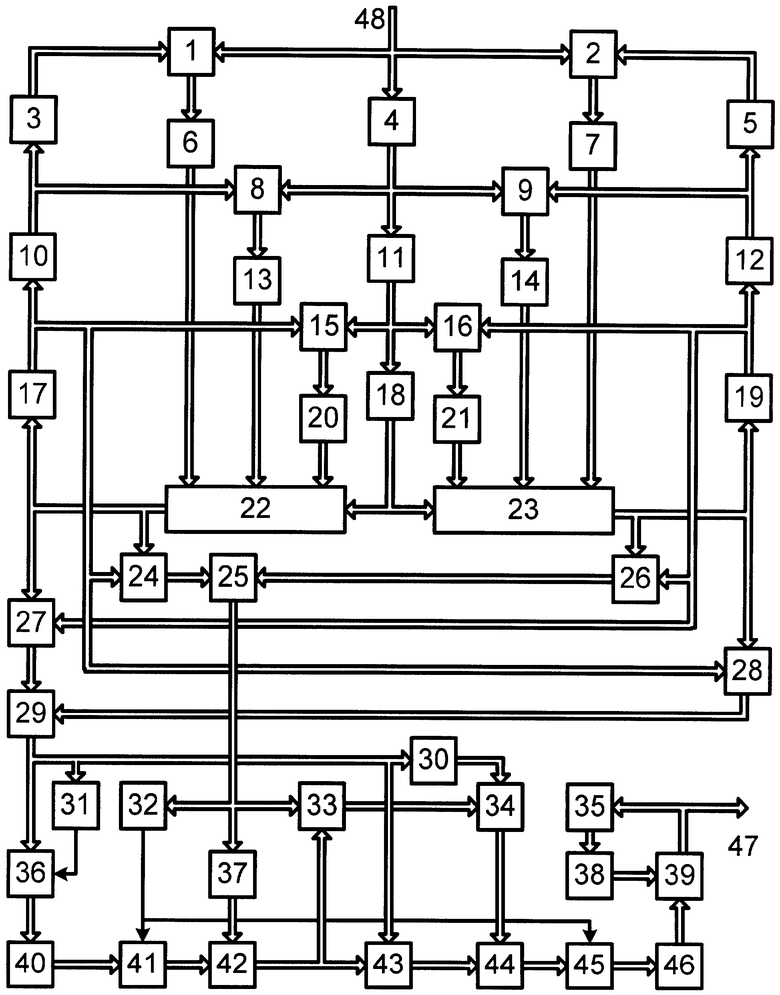
Способ измерения средней частоты морских волн, согласно которому сигналы, пропорциональные колебаниям морской поверхности, обрабатывают парой цепей, разность сдвигов фаз которых близка к 90°, определяют сигналы на выходах цепей, отличающийся тем, что определяют разность произведений сигналов на выходе одной цепи на задержанные на время усреднения сигналы с выхода другой, получают делимое, которое делят на делитель, равный сумме произведений сигналов на выходах цепей на задержанные сигналы одноименных цепей, определяют обратный тригонометрический тангенс отношения и, если делитель отрицательный, прибавляют π, результат делят на время усреднения и получают среднюю частоту морских волн.
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ЧАСТОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2001 |
|
RU2196961C1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| УСТРОЙСТВО ПРОТИВ АКВАПЛАНИРОВАНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2624276C2 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ РАСПРОСТРАНЕНИЯ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1993 |
|
RU2092792C1 |
| Гарнакерьян А.А., Сосунов А.С | |||
| Радиолокация морской поверхности | |||
| - Ростов-на-Дону: изд-во Ростовского университета, 1978, с.113-119 | |||
| Гоноровский И.С., Демин М.П | |||
| Радиотехнические цепи и сигналы | |||
| - М.: Радио и связь, 1994 | |||
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2000 |
|
RU2175111C1 |

