Изобретение относится к радиолокации, а именно к способам определения статистических характеристик морского волнения посредством радиолокатора (РЛ), установленного на летательном аппарате (ЛА).
Известен способ определения функции углового распределения общей энергии в спектре ветрового волнения моря, состоящий в облучении участка морской поверхности радиоимпульсами бортового РЛ со стабилизированной в горизонтальной плоскости антенной, приеме последовательности эхо-сигналов при вращении антенны по азимуту в секторе от 0 до 360 градусов и определении ширины ее доплеровского спектра в зависимости от направления облучения. По амплитуде синусоидальной составляющей и среднему значению ширины доплеровского спектра этой последовательности эхо-сигналов в зависимости от направления облучения судят об искомом параметре, например длине морских волн (МВ), направлению их распространения и высоте.
Недостаток этого способа состоит в том, что применительно к использованию на ЛА точность определения длины МВ и направления их распространения зависит от высоты полета ЛА, а также в сложности реализации, обусловленной необходимостью стабилизации антенны РЛ в горизонтальной плоскости.
Известен способ определения среднего периода морских ветровых волн. при котором преобразовывают изменение уровня морской поверхности в электрический сигнал, определяют за измеренный промежуток времени средний уровень морской поверхности, число пересечений уровня и обрабатывают полученные данные, причем определяют дополнительный уровень, равный 0,7-0,8 от среднеквадратического, и учитывают его при определении среднего числа пересечений.
Недостаток этого способа состоит в невысокой точности определения среднего периода (длины) МВ, так как он не учитывает влияния изменяющихся внешних условий, например скоростей полета ЛА и распространения МВ, а введение дополнительного уровня не позволяет учесть изменения влияния внешних условий.
Наиболее близким по своей технической сущности к предлагаемому является способ определения статистических характеристик морского волнения с ЛА, использующий бортовой коротковолновый импульсный РЛ с широкой диаграммой направленности антенны, жестко связанной с ЛА и направленной к морской поверхности, при полете по окружности на постоянной высоте, при котором из последовательности эхо-сигналов от морской поверхности выделяют их центрированную огибающую, при переходе которой через нулевой уровень формируют последовательность импульсов, частота следования которых пропорциональна среднеквадратической частоте морских волн, изменяют периоды следования этой последовательности импульсов пропорционально скорости полета и преобразуют их в напряжение, по которому измеряют текущую длину морских волн в зависимости от изменения текущего курса полета, выделяют из них два экстремальных значения длины волн - минимальное в направлении распространения и максимальное, в направлении ему перпендикулярном, равное длине гребней МВ. В другом варианте этого способа текущую длину МВ измеряют путем подсчета числа импульсов, совпадающего со среднеквадратической частотой. В дальнейшем место термина "главное направление распространения МВ" используется в соответствии с ГОСТ1845-73 термин "генеральное направление распространения МВ" (ГНРМВ), а направление гребней МВ определяется направлением волнового профиля, перпендикулярного ГНРМВ).
Недостаток этого способа состоит в невысокой точности измерения длины МВ в направлении их распространения и длины гребней МВ, а также ГНРМВ. Недостаток обусловлен тем, что эти статистические характеристики МВ измеряются по одному их экстремальному значению, погрешности измерения которого зависят от внешних условий, например скорости распространения МВ, скорости ветра и других условий.
Целью изобретения является повышение точности измерения длины морских волнр и длины их гребней, а также генерального направления распространения МВ.
Для этого в способе измерения статистических характеристик морского волнения с ЛА, использующем бортовой импульсный коротковолновый радиолокатор с широкой диаграммой направленности антенны, жестко связанной с ЛА, при полете по окружности на постоянной высоте, при котором из последовательности это-сигналов от морской поверхности выделяют центрированную огибающую, при переходе которой через нулевой уровень формируют последовательность импульсов, частота следования которых пропорциональна среднеквадратической частоте морских волн, изменяют периоды следования импульсов этой последовательности пропорционально скорости полета и преобразуют ее в напряжение, по которому измеряют текущую длину волн, в зависимости от изменения текущего курса полета, выделяют из них два экстремальных значения длины волн - минимальное в направлении распространения волн и максимальное в направлении ему перпендикулярном, равное длине гребней волн, измеренные текущие значения длины волн сопрягают с текущим курсом полета, сравнивая предыдущие значения длины волн с последующими их значениями, выделяют и запоминают четыре их экстремальных значения - два минимальных, измеренных на курсах полета, совпадающих с направлением распространения волн и с направлением ему противоположным, и два максимальных значения длины волн, измеренных на противоположных курсах полета, перпендикулярных направлению распространения, попарно усредняют экстремальные значения длины волн, принимая среднее значение минимумов за длину морских волн в направлении их распространения, а среднее значение максимумов - за длину гребней морских волн. Кроме того, два измеренных минимальных значения длины морских волн сопрягают по времени со значениями текущих курсов полета ЛА, которые запоминают, путем сравнительного анализа определяют значения курсов, соответствующих меньшей и большей длине волн, а затем курс, соответствующий большей длине волны, путем поворота на угол +180о приводят в область значений курса, соответствующего меньшей длине волн, в зависимости от того превосходит или не превосходит этот курс значение курса, соответствующего большему из двух минимальных значений длины вольн, затем курс, соответствующий меньшей длине волн, и приведенный к нему курс, соответствующий большей длине волн, усредняют, принимая среднее значение этих курсов за генеральное направление распространения МВ.
Введенные новые операции относятся к существенным признакам и образуют их новую совокупность, так как находятся в причинно-следственной связи с достигаемым, более высоким чем в прототипе техническим результатом. Он состоит в повышении точности измерения длины МВ, длины их гребней, а также ГНРМВ. Это достигается, во-первых, тем, что каждая из этих статистических характеристик МВ определяется по двум независимым случайным измерениям, вместо одного их измерения в прототипе. Во-вторых, точность измерения этих характеристик повышается путем компенсации погрешности, вносимой внешними условиями, например собственной скоростью распространения МВ, скоростью ветра и др. , которые в прототипе не учитываются. Эти погрешности близки по величине и противоположны по знаку при измерении характеристик МВ на противоположных курсах полета ЛА, а потому компенсируются при суммировании, выполняемом в процессе усреднения. В прототипе эта возможность не используется. Один вариант изобретения может использоваться автономно, а другой - только совместно с первым.
Средняя длина МВ а направлении определяется по формуле =
=  =
=  =
=  , (1) где α - угол отклонения направления полета ЛА от ГНРМВ;
, (1) где α - угол отклонения направления полета ЛА от ГНРМВ;
λmin - средняя длина МВ в ГНРМВ при α = π;
n =  -1 - коэффициент, характеризующий анизотропность МВ;
-1 - коэффициент, характеризующий анизотропность МВ;
λmax - средняя длина гребня МВ в направлении α =  π/2;
π/2;
vгα - горизонтальная составляющая средней скорости полета ЛА;
vв - скорость движения МВ;
fск=  =
=  - среднеквадратическая частота и период центрированной огибающей это-сигналов от морской поверхности;
- среднеквадратическая частота и период центрированной огибающей это-сигналов от морской поверхности;
Nос - среднее число пересечений нулевого уровня центрированной огибающей отраженного сигнала.
Величина vгα скорости ЛА вводится на борту от датчика скорости полета путем умножения периода Тск на величину, пропорциональную vгα.
Величина Nос подсчитывается в прототипе посредством счетчика импульсов.
Так как в предлагаемом способе и прототипе происходит временное (частотное) преобразование сигналов, обусловленное отличием vгα и vв, то формулу (1) удобно представить в следующем виде: =
=  =
=  =
=  =
=  (2) где fв - среднеквадратическая частота МВ;
(2) где fв - среднеквадратическая частота МВ;
fck= fo+fвcosα = fв(Kпв+cosα);
Кпв= vгα /vв= fo/fв - коэффициент преобразования временного масштаба;
fo= vвКпв - среднеквадратическая частота МВ, преобразованных на борту ЛА.
Скорость vв продвижения волнового фронта на борту ЛА неизвестна. Так как она составляет 5-10% от скорости ЛА, ею пренебрегают, а в прототипе используется приближенная формула =
=  =
=  =
=  (3) записанная для случая α = π и α = 0, с учетом преобразования временного масштаба сигналов. При этом морская поверхность предполагается "застывшей", т. е. МВ, распространяющиеся со скоростью vвсчитаются неподвижными. Погрешность в определении длины МВ можно определить, используя формулы (1) и (3)
(3) записанная для случая α = π и α = 0, с учетом преобразования временного масштаба сигналов. При этом морская поверхность предполагается "застывшей", т. е. МВ, распространяющиеся со скоростью vвсчитаются неподвижными. Погрешность в определении длины МВ можно определить, используя формулы (1) и (3) =
=  -
- =
=  =
=  (4)
(4)
При α = 0, т. е. при полете вслед движению МВ, величина  положительна, что соответствует приращению длины МВ. При α = π величина
положительна, что соответствует приращению длины МВ. При α = π величина  отрицательна, длина МВ минимальна, а соответствующий курс ЛА принимается за ГНРМВ.
отрицательна, длина МВ минимальна, а соответствующий курс ЛА принимается за ГНРМВ.
Определенный недостаток прототипа состоит в том, что второе минимальное значение длины МВ при α = 0 не используется. Величина разброса измеренных значений длин МВ в ГНРМВ и в направлении ему противоположном удваивается по сравнению с ошибкой  в одном направлении
в одном направлении
 =
= =
= (4')
(4')
Известно, что скорость vв распространения МВ может составлять 20-30 км/ч, а реальная скорость полета ЛА при выполнении измерений имеет величину vгα = 300-500 км/ч. При этом разброс измеренных значений длины МВ при полете в противоположных направлениях α = 0 и α= π может составить 15-20% . Это указывает на целесообразность измерения двух минимальных длин МВ λminmin= λmm и λmin = λm при полете ЛА в ГНРМВ и в обратном направлении, а также измерения соответствующих курсов ЛА, что в прототипе не используется.
Из формулы (3) следует, что измеренная длина МВ имеет два минимальных значения при α = π и α = 0: =
=  и
и  =
=  (5)
(5)
В прототипе используется только первое из этих выражений, соответствующее α= π. В заявляемом способе используются оба выражения (5), которые суммируются и усредняются =
= =
= =
= (6)
(6)
Из сравнения (6) с (5) и (4) следует, что длина МВ в заявляемом способе измеряется с меньшей погрешностью, чем в прототипе, причем с возрастанием значения Кпв погрешность убывает. Так, например, при vгα = 400 км/ч= 112 м/c, vв= 20 км/ч= 5,6 м/с и fв= 0,1 Гц, Кпв= 20, для прототипа согласно (5), получим λ'αmm= 53,3 м, λ'αm= 58,94 м, при их разбросе = 5,64 м, что близко к 10% от точного значения длины МВ = 56 м. Близкий результат получаем и при использовании (4) Δλ'2 = 5,1 м. Для заявляемого способа согласно (6) получаем почти точное значение длины МВ λ'αср= 56,1 м, т. к. погрешностью в 0,1 м можно пренебречь.
Уменьшение погрешности в определении длины МВ в ГНРМВ объясняется тем, что ее изменения за счет скорости распространения vв и других внешних условий имеют противоположные знаки и близкую величину при полете ЛА в направлении распространения МВ α = π и в направлении ему противоположном α = 0, что приводит к их компенсации при суммировании по формуле (6). Получаемый при этом результат близок к точной формуле (1). Его можно также получить, если в формулу (3), используемую в прототипе, ввести скорость МВ, равную ±vвcosα, однако для этого скорость МВ нужно еще измерить, что является отдельной задачей.
Максимальные значения длины МВ измеряется при полете ЛА в направлении, перпендикулярном ГНРМВ, при α = π/2. При этом погрешность за счет скорости МВ мала согласно (4). Однако введение в заявляемом способе операций запоминания, суммирования и усреднения двух максимальных значений длины МВ, не использующихся в прототипе. позволяет более точно определить длину гребней МВ, так как влияние внешних условий при этом компенсируется аналогично ГНРМВ.
Изложенное подтверждает, что точность измерения длины МВ в направлении их распространения и длины их гребней в заявляемом способе выше, чем в прототипе. Это обеспечивается как суммированием двух независимых значений длины МВ, так и компенсацией погрешности их измерения, возникающей под влиянием внешних воздействий.
Способ измерения ГНРМВ (см. таблицу и фиг. 4) основан на измерении, запоминании и сравнении двух минимальных значений длины МВ и сопряженных с ними двух значений курсов полета ЛА. Как следует из формулы (5), меньшее из двух минимальных значений длины МВ, измеренных при облете соответствует курсу полета ЛА в направлении распространения МВ- Ψmn, а большее - в направлении ему противоположном - Ψm. Сравнив значения двух минимальных длин МВ  и
и  и сопряженные с ними курсы полета ЛА, например, посредством двух компараторов, можно установить, в каком из регистров памяти они записаны. Тогда, приводя к курсу Ψmm, близкому к направлению распространения МВ курс Ψm полета ЛА в противоположном направлении путем поворота его на +180о, получим приведенный курс Ψпр= Ψm+180о, а затем, суммируя и усредняя оба курса, получим формулу для определения ГНРМВ
и сопряженные с ними курсы полета ЛА, например, посредством двух компараторов, можно установить, в каком из регистров памяти они записаны. Тогда, приводя к курсу Ψmm, близкому к направлению распространения МВ курс Ψm полета ЛА в противоположном направлении путем поворота его на +180о, получим приведенный курс Ψпр= Ψm+180о, а затем, суммируя и усредняя оба курса, получим формулу для определения ГНРМВ
Ψгн=  (7)
(7)
Здесь знак постоянного угла +180о следует выбирать в зависимости от того, превосходит или не превосходит курс Ψm по величине курс Ψmm.
Отметим, что аналогично формуле (6), при наличии погрешности ΔΨ в измерении, обусловленной влиянием внешних условий Ψmm'= Ψmm- ΔΨ и Ψпр'= Ψm+ ΔΨ , эта погрешность при суммировании по формуле (7) также компенсируется, так как имеет обратные знаки при противоположных курсах полета ЛА.
Возможные варианты облета морской поверхности приведены на фиг. 4 и поясняются также таблицей.
Каждому из четырех вариантов облета соответствует свой вариант сравнительного и логического анализа двух минимальных значений длины МВ и сопряженных с ними курсов ЛА, полученных при облете. Если, например, при облете получено одно из минимальных значений длины МВ большее, чем второе минимальное ее значение  > λ2, а сопряженные с ними курсы Ψ1 > Ψ2, то можно сделать вывод, что
> λ2, а сопряженные с ними курсы Ψ1 > Ψ2, то можно сделать вывод, что  =
=  соответствует большей длине МВ,
соответствует большей длине МВ,  =
=  - соответствует меньшей длине МВ, которой соответствует сопряженный курс Ψ2= Ψmm < Ψ1= Ψm, указывающий направление распространения, что иллюстрируется первой строкой таблицы (столбцы 1-6) и фиг. 4а. Строки первая и вторая, фиг. 4а и 4б соответствуют направлению облета по часовой стрелке, а третья и четвертая и фиг. 4в и 4г - облету в противоположном направлении. Анализ остальных строк таблицы и фиг. 4 очевиден. Для автоматического осуществления этого анализа значения двух минимальных длин МВ и сопряженных с ними курсов ЛА необходимо запоминать (регистры 36 и 37 на фиг. 1 и регистры 1 и 2 на фиг. 2), а затем сравнить, например, посредством цифровых компараторов (3 и 4 на фиг. 2). Здесь мы указали для наглядности позиции регистров и компараторов на функциональных схемах устройств. В столбце 6 таблицы указаны возможные логические уровни на выходах компаратора минимальных длин МВ(3 на фиг. 2) и компаратора сопряженных с ними курсов полета ЛА (4 на фиг. 2). Если, например, на выходах "меньше" и "больше" этих компараторов получены сочетания 0101, как в первой строке таблицы (столбец 6), то это означает, что одно из минимальных значений
- соответствует меньшей длине МВ, которой соответствует сопряженный курс Ψ2= Ψmm < Ψ1= Ψm, указывающий направление распространения, что иллюстрируется первой строкой таблицы (столбцы 1-6) и фиг. 4а. Строки первая и вторая, фиг. 4а и 4б соответствуют направлению облета по часовой стрелке, а третья и четвертая и фиг. 4в и 4г - облету в противоположном направлении. Анализ остальных строк таблицы и фиг. 4 очевиден. Для автоматического осуществления этого анализа значения двух минимальных длин МВ и сопряженных с ними курсов ЛА необходимо запоминать (регистры 36 и 37 на фиг. 1 и регистры 1 и 2 на фиг. 2), а затем сравнить, например, посредством цифровых компараторов (3 и 4 на фиг. 2). Здесь мы указали для наглядности позиции регистров и компараторов на функциональных схемах устройств. В столбце 6 таблицы указаны возможные логические уровни на выходах компаратора минимальных длин МВ(3 на фиг. 2) и компаратора сопряженных с ними курсов полета ЛА (4 на фиг. 2). Если, например, на выходах "меньше" и "больше" этих компараторов получены сочетания 0101, как в первой строке таблицы (столбец 6), то это означает, что одно из минимальных значений  >
>  записано в перый регистр, а второе меньшее значение - во второй регистр (36 и 37 фиг. 1), а сопряженные с ними курсы полета Ψ1 > Ψ2 записаны в регистры 1 и 2 (фиг. 2), причем
записано в перый регистр, а второе меньшее значение - во второй регистр (36 и 37 фиг. 1), а сопряженные с ними курсы полета Ψ1 > Ψ2 записаны в регистры 1 и 2 (фиг. 2), причем  =
=  >
>  =
=  , Ψ1= Ψm > Ψ2= Ψmm
, Ψ1= Ψm > Ψ2= Ψmm
Это означает, что с меньшей из двух минимальных длин волн  сопряжен курс Ψmm, являющийся курсом распространения МВ или близким к нему, а большей длине волны соответствует курс Ψm, противоположный первому. Этих данных вполне достаточно, чтобы определить ГНРМВ по формуле (7). Этому результату соответствует фиг. 4а. Три другие строки таблицы и фиг. 4б, в, г соответствуют трем остальным возможным вариантам облета. Так строка 2 таблицы и фиг. 4б соответствуют изменению направления распространения на обратное, а строки 3 и 4 соответствуют изменению направления облета против движения часовой стрелки. Для наглядности в каждой строке приведен цифровой пример. При этом приведенный курс Ψпр= Ψm+180о также определяется из сравнительного анализа, т. е. либо Ψmm < Ψm и постоянная величина 180о вычитается из курса, как в строке 1 таблицы, либо суммируется с ним, как в строке 2. Из столбца 6 таблицы следует, что в каждом из двух компараторов можно использовать только по одному выходу, на котором в зависимости от условий облета возникают сигналы единичного или нулевого уровня, как в столбце 7. Второй выход компаратора курса при этом можно использовать для определения знака в формуле приведения.
сопряжен курс Ψmm, являющийся курсом распространения МВ или близким к нему, а большей длине волны соответствует курс Ψm, противоположный первому. Этих данных вполне достаточно, чтобы определить ГНРМВ по формуле (7). Этому результату соответствует фиг. 4а. Три другие строки таблицы и фиг. 4б, в, г соответствуют трем остальным возможным вариантам облета. Так строка 2 таблицы и фиг. 4б соответствуют изменению направления распространения на обратное, а строки 3 и 4 соответствуют изменению направления облета против движения часовой стрелки. Для наглядности в каждой строке приведен цифровой пример. При этом приведенный курс Ψпр= Ψm+180о также определяется из сравнительного анализа, т. е. либо Ψmm < Ψm и постоянная величина 180о вычитается из курса, как в строке 1 таблицы, либо суммируется с ним, как в строке 2. Из столбца 6 таблицы следует, что в каждом из двух компараторов можно использовать только по одному выходу, на котором в зависимости от условий облета возникают сигналы единичного или нулевого уровня, как в столбце 7. Второй выход компаратора курса при этом можно использовать для определения знака в формуле приведения.
Таким образом, определения ГНРМВ по формуле (7) предлагаемого способа как и длины МВ по формуле (6), является более точным, чем в прототипе. Это обеспечивается не только суммированием и усреднением двух независимых противоположных курсов полета ЛА, сопряженных с двумя минимальными значениями длины МВ, но и компенсацией погрешности, обусловленной влиянием внешних условий.
Отметим, что в таблице и на фиг. 4 показано ГНРМВ, принятое в авиации - это курс ЛА навстречу движению МВ, отличающийся от действительного ГНРМВ на 180о.
На фиг. 1 приведена функциональная схема варианта устройства, реализующего способ по п. 1; на фиг. 2 - функциональная схема варианта устройства, реализующего способ по п. 2; на фиг. 3 - временые диаграммы, поясняющие операции выделения экстремальных значений длины МВ и формирования сигнала "Конец облета" в устройстве по п. 1; на фиг. 3а - временые диаграммы на выходе компаратора 14 для случая, когда первым выделяется одно из максимальных значений длины МВ; на фиг. 3б - одно из минимальных ее значений; диаграммы на фиг. 3в и 3г поясняют формирование сигнала "Конец облета" для случаев 3а и 3б; на фиг. 4 - варианты условий облета, которые также поясняются таблицей (фиг. 4а и 4б поясняют определение ГНРМВ при облете по часовой стрелке, а фиг. 4в и 4г - против ее движения).
Каждый из четырех вариантов облета на фиг. 4 дополнительно поясняется таблицей, где приведены также четыре варианта определения ГНРМВ в зависимости от результата сравнения двух минимальных значений длины МВ и значений сопряженных с ними курсов полета ЛА на выходах компараторов 3 и 4 (фиг. 2, столбцы 1-6). В столбце 7 приведен упрощенный вариант определения ГНРМВ, когда используется только по одному выходу компараторов 3 и 4. В столбце 8 показан выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, в столбцах 9 и 10 показаны выходы мультиплексоров 6 и 7, в столбце 11 - выход сумматора 11 приведенного курса, а в столбце 12 - выход сумматора-усреднителя 12, в котором определяется ГНРМВ.
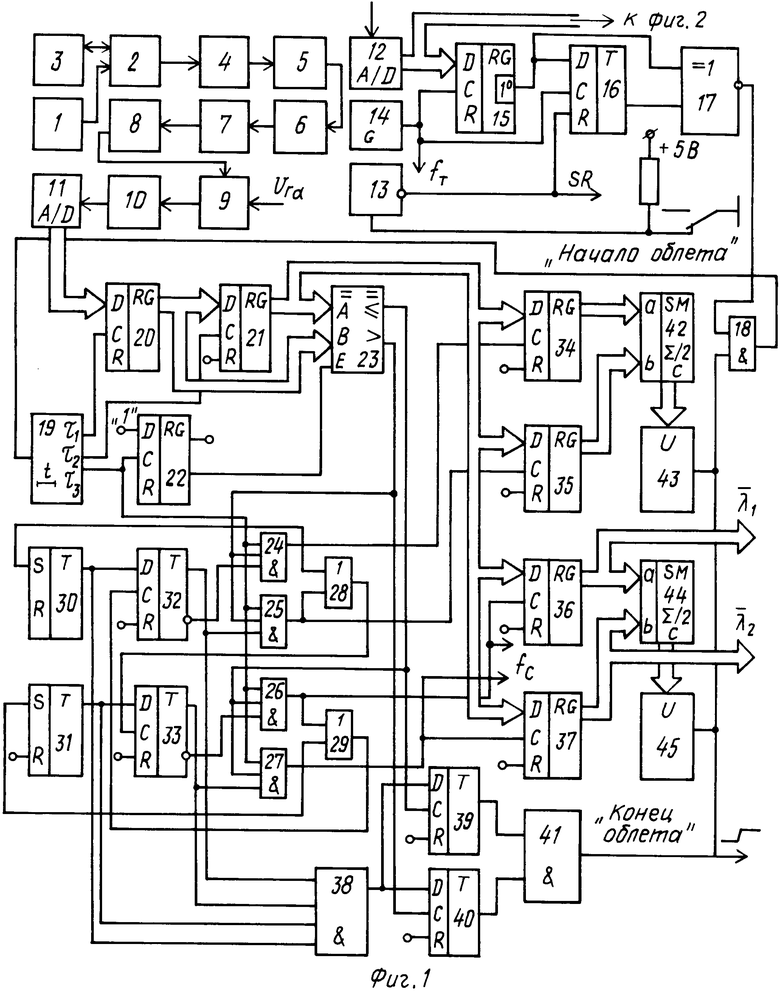
На фиг. 1 обозначены передатчик 1; антенный переключатель 2; антенна 3; приемник 4 со схемой АРУ; 5 видеодетектор; детектор 6 огибающей, центрирующее устройство 7, компаратор 8 нулевого уровня. перемножитель 9, преобразователь "время-напряжение" 10, аналого-цифровой преобразователь (АЦП) 11 длины волны; АЦП курса 12, формирователь 13 импульса сброса регистров, тактовый генератор 14, регистр 15 младшего разряда текущего курса ЛА; триггер 16; элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 17, элемент И 18, элемент 19 временной задержки; первый и второй регистры 20, 21 текущей длины МВ, регистр 22 разрешения работы компаратора 23; компаратор 23; четыре элемента И 24-27, два элемента ИЛИ 28, 29, четыре триггера 30-33; регистры 34, 35 двух максимальных значений длины МВ. регистры 36, 37 двух минимальных значений длины МВ, элемент И 38, триггеры 39, 40. элемент И 41; сумматоры усреднители 42, 44, индикаторы 43, 45 максимальной длины МВ (гребня) и минимальной длины МВ.
П р и м е р. Выполнения способа по варианту 1. Для его реализациии используются следующие приемы.
1. Выход ЛА в район облета на заданной высоте и скорости полета по окружности, включение радиолокатора, приведение в активное состояние функциональных блоков устройства по сигналу "Начало облета". Этот сигнал выдается пилотажно-навигационным комлексом (ПНК), бортовой ЭВМ или оператором.
2. Выделение из высокочастотных эхо-импульсов от морской поверхности видеоимпульсов и их огибающей, несущей информацию о всех статистических характеристиках МВ - высоте, длине, направлении распространения МВ и др. Центрирование огибающей, т. е. отделение низкочастотных составляющих, обусловленных эволюциями ЛА (блоки 1-7 фиг. 1).
3. Выделение из центрированной огибающей среднеквадратической частоты (периода) следования импульсов в моменты перехода огибающей через нулевой уровень, ввод в нее горизонтальной составляющей скорости полета vгα в соответствии с формулами (5, 6), выделение огибающей полученной последовательности импульсов, характеризующей преобразованное среднеквадратическое значение длины МВ и преобразование их в цифровой код в АЦП (блоки 8-11 фиг. 1).
4. Преобразование текущего курса ЛА в цифровой код посредством АЦП 12.
5. Сопряжение текущего курса ЛА с текущей длиной МВ. Блоки 13-19 фиг. 1 формируют из младшего разряда кода курса импульсы меток курса, по которым текущее значение длины МВ с выхода АЦП 11 записываются с временной задержкой в регистры 20, 21 и 22 и затем поступают на компаратор 23, выделяющий экстремальные значения длины МВ совместно с блоками 24-37. Одновременно с этим блоками 38-41 последовательно во времени к моменту получения четырех экстремальных значений длины МВ формируется сигнал "Конец облета". По этому сигналу прекращается подача синхроимпульсов и запись новой информации в регистры 20 и 21 (фиг. 1) о длине МВ и в регистры 1 и 2 (фиг. 2) о сопряженных с нею курсах полета ЛА, а также засвечиваются цифровые индикаторы длины МВ 43 и4 5.
6. Записанные в регистры 34 и 35 два максимальных значения длины гребней МВ суммируются и усредняются блоком 42 и высвечиваются на индикаторе 43. Записанные в регистрах 36 и 37 два минимальных значения длины МВ суммируются и усредняются блоком 44 и высвечиваются индикатором 43.
При этом пункты 1-4 относятся к ограничительной части формулы изобретения, а пункты 5 и 6 - к отличительной ее части.
Работа устройства, реализующего способ по варианту, осуществляется следующим образом.
РЛ с блоками 1-11 включается перед началом облета. Из последовательности высокочастотных импульсных эхо-сигналов с выхода приемника 4 с АРУ посредством видеодетектора 5 выделяется последовательность видеоимпульсов, огибающая которых выделяется пиковым детектором 6. Огибающая представляет собою непрерывный сигнал, флюктуирующий относительно среднего значения, не равного нулю. Посредством центрирующего устройства 7 из огибающей отфильтровываются низкочастотные составляющие спектра с частотами менее 0,5 Гц, обусловленные эволюциями ЛА (крен, тангаж). Центрированная огибающая со спектром 0,5-20 Гц поступает на компаратор 8, который выделяет из нее при переходе через нуль последовательность импульсов, частота следования которых пропорциональна среднеквадратической частоте МВ, преобразованной на борту ЛА в соответствии с формулами (1) и (2). Влияние горизонтальной скорости полета ЛА учитываается в перемножителе 9 путем изменения частоты следования (периода) импульсов пропорционально величине vгα, получаемой от бортового датчика. Из полученной последовательности импульсов с выхода перемножителя 9 посредством преобразователя "период-напряжение" 10 выделяется напряжение пропорциональное текущей длине МВ, которое посредством блока 11 АЦП длины МВ преобразуется в цифровой код.
Одновременно с этим текущие значения курса полета ЛА от бортового датчика посредством блока 12 АЦП курса также преобразуются в цифровой код и поступают в регистр младшего разряда кода курса 16 (фиг. 1) и одновременно в регистры 1 и 2 (фиг. 2), в которые записываются полные коды текущих курсов полета ЛА.
Новые операции способа начинаются по сигналу "Начало облета", поступающему от ПНК, бортовой ЭВМ или от оператора, по которому блок 13 формирует импульс сброса регистров, поступающий на R-входы регистров и триггеров. При этом по импульсам тактового генератора 14 в регистр 15 записывается значение младшего разряда кода курса ЛА, поступающего от АЦП 12. Блоки 13-19 образуют схему формирования меток курса, период следования которых близок ко времени изменения курса ЛА на 1о. Посредством триггера 16 и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17 формируются импульсы меток курса ЛА, которые через элемент И 18 и блок временной задержки 19 с задержкой τ1 < τ2 < τ3 поступают на входы синхронизации регистров 20, 21, 2 2и других блоков и в дальнейшем именуются для краткости синхроимпульсами. По первому синхроимпульсу τ1одно значение текущей длины МВ с выхода АЦП 11 записывается в регистр 20, по второму задержанному импульсу τ2 оно переписывается в регистр 21, а по третьему импульсу τ3 подготавливается к работе регистр 22 разрешения работы компаратора 23. По следующему синхроимпульсу τ1 в регистр 20 записывается новое, последующее текущее значение длины МВ, которое вместе с предыдущим значением длины МВ из регистра 21 поступает на информационные входы компаратора 23. На выходе компаратора 23 в зависимости от знака приращения длины МВ  =
=  -
-  формируются сигналы единичного уровня на выходе "больше" или на втором выходе "меньше или равно". На фиг. 3а и 3б показаны изменения этих уровней в случаях, когда облет начинается с положительного и отрицательного приращений длины МВ соответственно. Затем по второму задержанному синхроимпульсу τ2 бывшее последующее значение длины МВ из регистра 20 переписывается в регистр 21, а в регистр 20 по следующему третьему синхроимпульсу τ3 записывается очередное текущее значение длины МВ, которое после срабатывания регистра 22 сравнится в компараторе 23 с предыдущим значением длины МВ, записанным в регистре 20. При этом знаки логических уровней на выходе компаратора 23 изменяются при прохождении ЛА через экстремальное значение длины МВ (см. фиг. 3а и 3б). Дальнейший анализ распределения длин МВ и сопряжение их с курсом полета ЛА осуществляется аналогично. Блоки 20-23 совместно с блоками 24-37 образуют дискриминатор экстремальных значений длины МВ. В исходном состоянии на одни входы элементов И 24 и 25 поступают сигналы логических единицы и нуля с выходов триггера 32, а на аналогичные входы элементов И 26 и 27 - такие же сигналы с выходов триггера 33. Триггеры 30 и 31 находятся в сброшенном состоянии. На другие входы элементов И 24 и 25, 26 и 27 поданы сигналы логических единицы и нуля с выходов компаратора 23 "больше" или "меньше или равнро", соответственно. На третьи входы элементов И 24-27 поступают синхроимпульсы с выхода блока 19 временной задержки. Предположим, что на выходе компаратора 23 "больше" при облете появился сигнал единичного уровня. Это соответствует той части траектории облета, где длина МВ изменяется от одного из минимальных значений к максимальному при положительном приращении. Сигнал "больше" поступит на вторые входы элементов И 24 и 25, но сработает только первый из них при поступлении синхроимпульса с выхода блока 19. При этом синхроимпульсы с выхода элемента И 24 поступают в трех направлениях: на вход триггера 30, переводя его в единичное
формируются сигналы единичного уровня на выходе "больше" или на втором выходе "меньше или равно". На фиг. 3а и 3б показаны изменения этих уровней в случаях, когда облет начинается с положительного и отрицательного приращений длины МВ соответственно. Затем по второму задержанному синхроимпульсу τ2 бывшее последующее значение длины МВ из регистра 20 переписывается в регистр 21, а в регистр 20 по следующему третьему синхроимпульсу τ3 записывается очередное текущее значение длины МВ, которое после срабатывания регистра 22 сравнится в компараторе 23 с предыдущим значением длины МВ, записанным в регистре 20. При этом знаки логических уровней на выходе компаратора 23 изменяются при прохождении ЛА через экстремальное значение длины МВ (см. фиг. 3а и 3б). Дальнейший анализ распределения длин МВ и сопряжение их с курсом полета ЛА осуществляется аналогично. Блоки 20-23 совместно с блоками 24-37 образуют дискриминатор экстремальных значений длины МВ. В исходном состоянии на одни входы элементов И 24 и 25 поступают сигналы логических единицы и нуля с выходов триггера 32, а на аналогичные входы элементов И 26 и 27 - такие же сигналы с выходов триггера 33. Триггеры 30 и 31 находятся в сброшенном состоянии. На другие входы элементов И 24 и 25, 26 и 27 поданы сигналы логических единицы и нуля с выходов компаратора 23 "больше" или "меньше или равнро", соответственно. На третьи входы элементов И 24-27 поступают синхроимпульсы с выхода блока 19 временной задержки. Предположим, что на выходе компаратора 23 "больше" при облете появился сигнал единичного уровня. Это соответствует той части траектории облета, где длина МВ изменяется от одного из минимальных значений к максимальному при положительном приращении. Сигнал "больше" поступит на вторые входы элементов И 24 и 25, но сработает только первый из них при поступлении синхроимпульса с выхода блока 19. При этом синхроимпульсы с выхода элемента И 24 поступают в трех направлениях: на вход триггера 30, переводя его в единичное
состояние, на вход регистра 34, куда при этом записывается текущее значение возрастающей длины МВ, а также через элемент ИЛИ 28 на вход синхронизации триггера 33, не переводя его в единичное состояние, так как триггер 31 находится в сброшенном состоянии. В момент, когда курс ЛА проходит через экстремум длины МВ, сигнал единичного уровня на выходе "больше" компаратора 23 исчезнет, элемент И 24 закроется, цепь синхронизации регистра 34 разорвется и в нем зафиксируется одно из максимальных значений длины МВ, полученное при облете. Теперь сигнал, логической единицы возникнет на выходе "меньше или равно" компаратора 23 сработает элемент И 26, а в регистре 36 по каждому синхроимпульсу с выхода блока 19 будет записываться текущее значение убывающей длины МВ с выхода регистра 21. Одновременно синхроимпульс с выхода элемента И 26 поступает на вход синхронизации триггера 31, который переходит в единичное состояние, а через элемент ИЛИ 29 - на вход синхронизации триггера 31, который также переходит в единичное состояние (диаграммы 2 и 3 на фиг. 3в). При переходе ЛА через одно из минимальных значений длины МВ сигнал единичного уровня с выхода "меньше или равно" компаратора 23 исчезнет, закроется элемент И 26, а в регистре 36 зафиксируется одно из минимальных значений длины МВ. При этом сигнал единичного уровня появится на выходе "больше" компаратора 23, поступит на вторые входы элементов И 24 и 25, но теперь сработает элемент И 25 синхроимпульсы с его выхода поступят на вход синхронизации регистра 35, в котором будут записываться возрастающие значения длины МВ. Одновременно синхроимпульс с выхода элемента И 24 поступает через элемент ИЛИ 28 на вход синхронизации триггера 33, который также переходит в единичное состояние (диаграммы 3 и 4 на фиг. 3в). В момент перехода курса ЛА через второе максимальное значение длины МВ сигнал логической единицы с выхода "больше" компаратора 23 исчезнет, элемент И 25 закроется, а в регистре 34 зафиксируется второе максимальное значение длины МВ. Теперь сигнал единичного уровня появится на выходе "меньше или равно" компаратора 23, а синхроимпульсы буду открывать элемент И 27, поступят на вход синхронизации регистра 37, в котором будут записываться убывающие значения длины МВ. При проходе курса ЛА через второе минимальное значение длины МВ
сигнал логической единицы на выходе компаратора 23 "меньше или равно" исчезнет, элемент И 27 закроется, а в регистре 37 зафиксируется второе минимальное значение длины МВ. После того, как зафиксированы два максимальных значения длины МВ (гребней) в регистрах 34 и 35 и два минимальных значения длины МВ в регистрах 36 и 37 облет считается законченным. Посредством специальной схемы формирования, состоящей из четырехвходового элемента И 38, двух триггеров 39 и 40, а также второго элемента И 41 формируется сигнал "Конец облета". Уже ко времени фиксирования второго максимума длины МВ в рассматриваемом примере все триггеры 30-33 находятся в единичном состоянии, элемент И 38 срабатывает, а на информационные входы триггеров 39 и 40 поступает сигнал логической единицы, но записывается он сперва в триггер 40 в момент прохода второго максимума длины МВ, фронтом импульса с выхода "больше" компаратора 23, а в триггер 39 - в момент фиксирования второго минимума, т. е. фронтом импульса с выхода "меньше или равно" компаратора 23. При этом срабатывает элемент И 41, элемент И 18 закрывается и разрывает цепь подачи синхроимпульсов в схему дискриминатора длины МВ. Одновременно сигнал "Конец облета" засвечивает индикаторы длины МВ 43 и 45.
Зафиксированные в регистрах 34 и 35 максимальные значения длины гребней МВ поступают на сумматор-усреднитель 42, а затем на индикатор 43. Аналогично, среднее значение двух минимальных длин МВ, записанных в регистрах 36 и 37, вычисляется сумматором-усреднителем 44 и подается на индикатор 45.
Таким образом, в результате работы описанного устройства реализуются следующие операции способа по варианту 1: анализ распределения текущих значений длины МВ посредством сравнения предыдущих значений с последующими - блоками 20 - 23; сопряжение этих значений с текущими значениями курса ЛА примерно через каждый градус путем формирования импульсов меток курса (синхроимпульсов) - блоками 12-19 и синхронизации ими блоков 20-23; выделение и запоминание четырех экстремальных значений длины МВ - блоками 23-37; попарное суммирование и усреднение двух максимальных значений длины МВ и двух их минимальных значений - блоками 42-45. Именно при этом достигается компенрсация влияния внешних условий (скорость движения МВ и др. ), на точность измерения длины МВ и их гребней. Кроме того, сформирован вспомогательный сигнал "Конец облета", защищающий зафиксированную информацию.
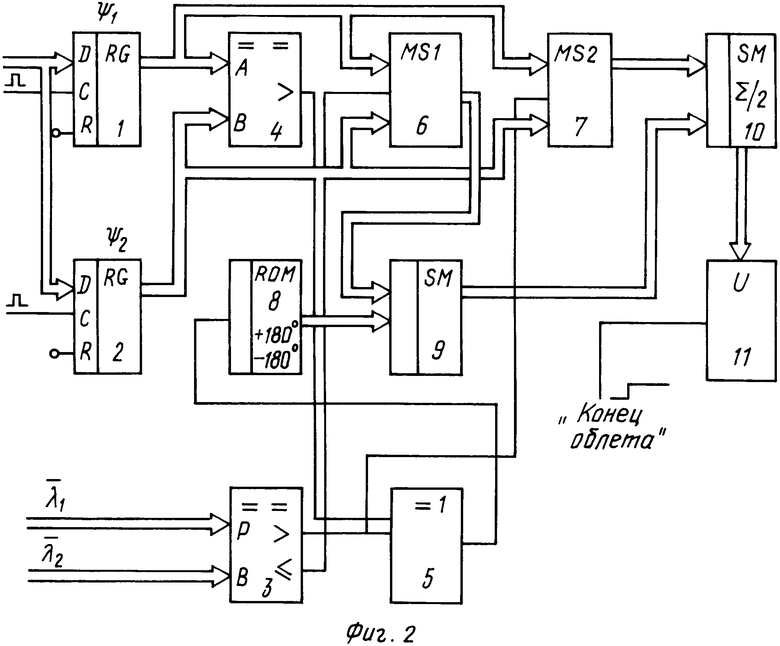
Функциональная схема устройства, реализующего способ по варианту 2, изображена на фиг. 2 и содержит следующие блоки:
регистры 1,2 курсов ЛА, сопряженных с двумя минимальными значениями длин МВ, компараторы 3,4 длины МВ и сопряженнырх с ними курсов ЛА, элемент "ИСКЛЮЧАЮЩЕЕ ИЛИ" 5, первый и второй мультиплексоры 6,7. постоянное ЗУ 8, первый сумматор 9, второй сумматор - усреднитель 10, индикатор 11.
В этом устройстве используются приемы, приведенные ранее а именно приемы, перечисленные ранее под номерами 1-6, кроме выделения и вычисления длины гребней МВ. Кроме того, используются следующие приемы:
7 - выделение курсов ЛА, сопряженных с двумя минимальными значениями длины МВ и запоминание их в регистрах 1 и 2;
8 - совместный сравнительный анализ двух минимальных значений длины МВ и сопряженных с ними курсов полета ЛА посредством компараторов 3 и 4, а также элемента 5 ИСКЛЮЧАЮЩЕЕ ИЛИ 5,
9 - вычисление приведенного курса и ГНРМВ по формуле (7) посредством мультиплексоров 6 и 7, ПЗУ 8, сумматора 9 и сумматора-усреднителя 10.
10 - оценка результатов облета по индикаторам 43 и 45 (фиг. 1) и 11 (фиг. 2).
Работа устройства осуществляется следующим образом.
При облете одновременно с записью двух минимальных значений длины МВ в регистры 36 и 37 (фиг. 1), посредством одних и тех же синхроимпульсов с выходов элементов И 26 и 27 в регистры 1 и 2 (фиг. 2) записываются два значения текущего курса ЛА, которые таким образом оказываются сопряженными по времени и в пространстве с минимальными значениями длины МВ. Значения длины МВ с выходов регистров 36 и 37 поступают на входы компаратора 3 длины МВ, а значения сопряженных курсов ЛА - на входы компаратора 4. Посредством этих компараторов осуществляется сравнительный анализ входных величин в соответствии с упрощенным его вариантом, когда на выходе компаратора 4 используется только выход "больше", а на выходе компаратора 3 используются выходы "больше" и "меньше или равно". Если, например, как в строке 1 столбец 7 таблицы, на выходах обоих компараторов образовались сигналы высокого уровня, то это означает, что записанные в регистрах 36 и 37 минимальные значения длины МВ  =
=  >
>  =
=  , а сопряженные курсы Ψ1= Ψm > Ψ2= Ψmm. При этом на выходе элемента 5 ИСКЛЮЧАЮЩЕЕ ИЛИ будет низкий уровень (нулевой), а на управляющих входах мультиплексоров 6 и 7 - соответственно нулевой и единичный уровни. Это означает, что на выходе мультиплексора 6 окажется значение курса Ψ1= = Ψm >Ψ2= Ψmm, записанного в регистр 1, а на выходе мультиплексора 7 - значение курса Ψ2= Ψmm < Ψ1= Ψm, т. е. курс распространения МВ. Значение курса Ψm с выхода мультиплексора 6 вместе с постоянным значением курса (-180о) с выхода ПЗУ 8 поступают на входы сумматора 9, который вычисляет значение приведенного курса Ψпр= Ψm(-180о), так как курс Ψmm < Ψm, а на выходе элеменрта 5 ИСКЛЮЧАЮЩЕЕ ИЛИ имеется сигнал низкого уровня. Приведенный курс Ψпр с выхода сумматора 9 совместно с курсом распространения Ψm с выхода мультиплексора 7 поступает на входы сумматора-усреднителя 10, где усреднение происходит путем деления суммы входных величин пополам, а на его выходе получаем значение ГНРМВ в соответствии с формулой (7). При других вариантах облета для пояснения можно воспользоваться таблицей. Вычисленное значение ГНРМВ фиксируется индикатором 11, который также засвечивается по сигналу "Конец облета".
, а сопряженные курсы Ψ1= Ψm > Ψ2= Ψmm. При этом на выходе элемента 5 ИСКЛЮЧАЮЩЕЕ ИЛИ будет низкий уровень (нулевой), а на управляющих входах мультиплексоров 6 и 7 - соответственно нулевой и единичный уровни. Это означает, что на выходе мультиплексора 6 окажется значение курса Ψ1= = Ψm >Ψ2= Ψmm, записанного в регистр 1, а на выходе мультиплексора 7 - значение курса Ψ2= Ψmm < Ψ1= Ψm, т. е. курс распространения МВ. Значение курса Ψm с выхода мультиплексора 6 вместе с постоянным значением курса (-180о) с выхода ПЗУ 8 поступают на входы сумматора 9, который вычисляет значение приведенного курса Ψпр= Ψm(-180о), так как курс Ψmm < Ψm, а на выходе элеменрта 5 ИСКЛЮЧАЮЩЕЕ ИЛИ имеется сигнал низкого уровня. Приведенный курс Ψпр с выхода сумматора 9 совместно с курсом распространения Ψm с выхода мультиплексора 7 поступает на входы сумматора-усреднителя 10, где усреднение происходит путем деления суммы входных величин пополам, а на его выходе получаем значение ГНРМВ в соответствии с формулой (7). При других вариантах облета для пояснения можно воспользоваться таблицей. Вычисленное значение ГНРМВ фиксируется индикатором 11, который также засвечивается по сигналу "Конец облета".
Таким образом, устройство производит вычисление ГНРМВ в соответствии со всеми операциями способа по варианту 2, обеспечивая повышение точности его измерения за счет повышения точности измерения длины МВ, а также за счет суммирования и усреднения двух независимых значений курсов полета ЛА, сопряженных с двумя минимальными значениями длины МВ, а также за счет компенсации погрешности измерения, вызванной внешними условиями.
Возможны другие варианты устройства для реализации предлагаемого способа. Один из них, например, может быть основан на раздельных записи и считывании информации из регистров. Например, запись производится по импульсам меток курса, а считывание и вычисление - по импульсам тактового генератора, после формирования сигнала "Конец облета". Однако рассмотренный вариант является наиболее простым.
Из рассмотрения функциональных схем фиг. 1 и 2 следует, что все блоки устройств, реализующих способ по вариантам 1 и 2 выполнены на типовых функциональных элементах вычислительной техники и поэтому способ может быть использован в авиационной промышленности.
Способ и реализующие его устройства могут быть использованы в интересах океанологии, морской авиации, метеорологии и в других областях науки и техники, использующих информацию о состоянии морского волнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ РАСПРОСТРАНЕНИЯ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1993 |
|
RU2092792C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2104563C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1996 |
|
RU2112925C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 2000 |
|
RU2175111C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1992 |
|
RU2046287C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2486527C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ С ЛЕТАТЕЛЬНОГО АППАРАТА | 1975 |
|
SU692321A1 |



Использование: радиолокация, определение статистических характеристик морского волнения посредством радиолокатора, установленного на летательном аппарате. Сущность изобретения: способ заключается в использовании бортового импульсного коротковолнового радиолокатора с широкой диаграммой направленности антенны, жестко связанной с летательным аппаратом, при его полете по окружности на постоянной высоте, выделение из последовательности эхо-сигналов от морской поверхности, центрированной огибающей, формировании, при переходе через нулевой уровень огибающей, последовательности импульсов с последующим измерением текущей длины морской волны (МВ) в зависимости от изменения текущего курса полета, выделении двух экстремальных значений длины МВ - минимального, измеренного в направлении распространения, и максимального в направлении ему перпендикулярном, равного длине гребней МВ, сравнении предыдущего значения длины МВ с последующим, выделении и запоминании четырех их экстремальных значений - двух минимальных, измеренных на курсах полета, совпадающих с направлением распространения МВ, и направлением ему противоположным, и два максимальных значения длины МВ, измеренных на противоположных курсах полета, перпендикулярных направлению распространения, с последующим определением длины МВ, длины гребней МВ и генерального направления распространения МВ. 1 з. п ф-лы, 4 ил.
Ψг.н=  ,
,
где K = 1 при Ψmm > Ψm,
K = -1 при Ψmm < Ψm.
