Изобретение относится к радиолокации и может быть использовано в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства.
Необходимым условием обеспечения этого управления и контроля является знание координат всех объектов, находящихся в контролируемом пространстве, с точностью по угловым координатам 20' - 40'.
Причем измеренные при первичном обнаружении координаты должны уточняться в процессе движения объектов, т.е. обнаруженные объекты должны сопровождаться по определенному алгоритму (Кузьмин С.3. Основы проектирования систем цифровой обработки радиолокационной информации М., Радио и связь, 1986, с. 135).
Наибольший интерес представляют способы обнаружения и сопровождения объектов, которые обеспечивают наименьшие затраты высокочастотной энергии РЛС, поскольку это обеспечивает экономию энергоресурсов и улучшение экологической обстановки.
Известен способ радиолокационного обнаружения и сопровождения объектов, основанный на пеленгации излучений (переизлучений) объекта, поиске и обнаружении объекта в запеленгованном направлении, измерении его координат с помощью РЛС и его сопровождение, причем в процессе сопровождения по излучениям с использованием измеренного значения скорости операции РЛС повторяют, если погрешность сопровождения, может оказаться недостаточной: если измеренные координаты пеленга отклонились от экстраполированных больше допустимого значения или в случае изменения параметров излучений, а при исчезновении излучений (переизлучений) или при достижении объектом заранее установленного рубежа переходят на сопровождение в активном режиме (Заявка на предполагаемое изобретение N 98104364/09 (004816) от 12.03.98).
Экономия затрат энергии РЛС на сопровождение объекта, пеленгуемого по принимаемым от него излучениям, достигается за счет того, что при совпадении измеряемого пеленга с его экстраполированным значением сопровождение осуществляют без излучения сигналов РЛС. Недостаток способа состоит в том, что при маневрировании объекта способ становится, не эффективным, а при прекращении объектом излучении он перестает функционировать.
Известен способ радиолокационного обнаружения и сопровождения объектов, основанный на обзоре пространства длинноволновой РЛС (РЛСд) и передаче данных сопровождения на коротковолновую РЛС (РЛСк), на измерении углового размера пакета отраженных сигналов РЛСд, принятых от неразрешаемых ею объектов, и угловых координат его центра, на разрешении объектов с помощью РЛСк, на привязке их угловых координат к угловым координатам центра пакета и на сопровождении их с помощью РЛСд по центру пакета, на повторении операций РЛСк после изменения размера пакета (Патент RU 2092868).
Экономия затрат энергии на сопровождение объектов в этом способе достигается за счет того, что при сопровождении используют РЛСд, расход энергии которой меньше, чем РЛСк (БИНТИ N 46(92291), ТАСС 12.11.86); а РЛСк используют для уточнения координат неразрешаемых РЛСд групповых объектов лишь в случае, когда изменится размер пакета отраженных сигналов РЛСд.
Недостаток способа состоит в том, что из-за флюктуаций сигналов (Теоретические основы радиолокации под ред. Я.Д.Ширмана. М., Сов.радио, 1970, с.54, рис.2.19) размер их пакета может изменится при неизменном угловом сдвиге объектов, т. е. когда уточнение их координат не требуется (произойдет ложное обнаружение маневра объектов относительно друг друга). Это приведет к излишним затратам энергии РЛСк.
Наиболее близким техническим решением является способ радиолокационного обнаружения и сопровождения объектов, основанный на обнаружении, измерении параметров пакета отраженных сигналов с помощью длинноволновой РЛС (РЛСд), разрешении объектов с помощью коротковолновой РЛС (РЛСк), привязке их координат к координатам центра пакета, сопровождении их с помощью РЛСд по центру пакета, на уточнении с помощью РЛСк координат сопровождаемых объектов, если погрешность их измерений может оказаться больше допустимой, например, в случаях: если измеренные значения координат центра пакета отклонились от экстраполированных больше допустимой величины или обнаружен признак маневра объекта, например, изменилась его скорость или в сопровождении возникли дополнительные варианты привязки объектов к трассам (заявка на предполагаемое изобретение N 98103805/09 (004261 от 03.03.98). Объекты разнесены в пространстве на угол Δβ01 на фиг.1 и Δβ02 на фиг.2.
По излучениям определяют пеленг на объект O1- βп1 фиг.1 и βп2 на фиг.2, а по пакету сигналов РЛСд - координаты его центра соответственно βц1 и βц2, которые принимают за координаты группового объекта. По этим данным определяют параметры привязки центра пакета к пеленгу излучающего объекта - соответственно Δβ1= βц1-βп1 и Δβ2= βц2-βп2.
Если группа этих объектов маневрирует, сохраняя угловой разнос, т.е. Δβ01≈ Δβ02, то и Δβ1≈ Δβ2.
При этом, согласно предлагаемому способу независимо от изменения размера пакета и положения его центра относительно экстраполированного значения уточнение координат с помощью РЛСк проводится не будет.
Если же произойдет изменение углового разноса объектов так, что Δβ02≠ Δβ01, то изменится как привязка координат объектов к центру пакета, так и привязка центра пакета к пеленгу, т.е. Δβ2≠ Δβ1 Если это изменение будет обнаружено, то будет произведено уточнение координат с помощью РЛСк, т. е. будет уточнена привязка координат объектов к центру пакета и параметры привязки центра пакета к пеленгу. Обнаружение изменений параметров привязки может производится по критерию аналогичному критерию обнаружения сигнала, т. е. по превышению порогового уровня 
Таким образом, в отличие способа-прототипа в заявляемом способе РЛСк будет использоваться для уточнения координат только в случае изменения углового разноса объектов в группе, независимо от величины маневра всей группы или измерения размера пакета сигналов.
Условием, ограничивающем область использования изобретения, является требование наличия излучении хотя бы от одного объекта группы, но при этом следует считать, что вероятность работы радиоэлектронных средств, в частности бортовых РЛС, групповых объектов при их маневре повышается.

Изобретение относится к области радиолокации и может быть использовано в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства. Техническим результатом является снижение затрат энергии РЛС при сопровождении маневрирующих объектов, излучающих высокочастотные колебания. Для этого в способе, основанном на обнаружении и сопровождении объектов по центру пакета отраженных сигналов с помощью РЛС с длиной волны λд, на разрешении объектов и привязке их угловых координат к угловым координатам центра пакета с помощью РЛС с длиной волны λк < λд, дополнительно пеленгуют объекты по принимаемым от них излучениям и привязывают координаты центра пакета к пеленгам, операции РЛС с длиной волны λк повторяют, если изменение параметров привязки превысило пороговое значение. 2 ил.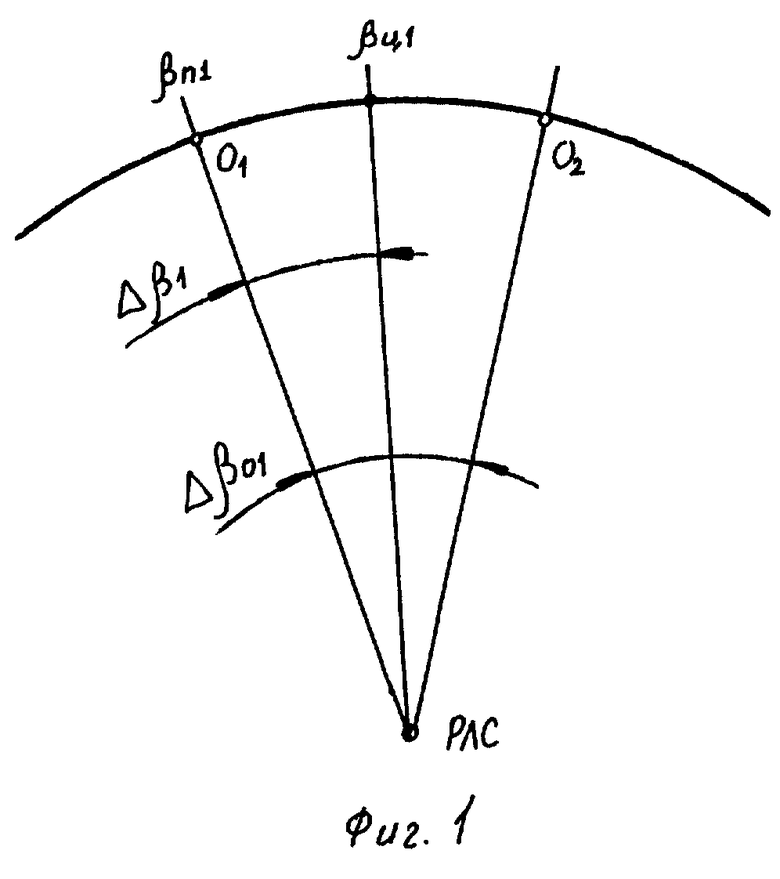
Способ радиолокационного обнаружения и сопровождения объектов, основанный на обнаружении и сопровождении объектов по центру пакета отраженных сигналов с помощью РЛСд с длиной волны λд, на разрешении объектов и привязке их угловых координат к угловым координатам центра пакета с помощью РЛСк с длиной волны λк < λд, отличающийся тем, что дополнительно пеленгуют объекты по принимаемым от них излучениям и привязывают координаты центра пакета к пеленгам, операции РЛСк повторяют, если изменение параметров привязки превысило пороговое значение
Δβпор:|Δβ2-Δβ1| > Δβпор,
где Δβ2, Δβ1 - параметры привязки центра пакета к пеленгу излучающего объекта.
| Теоретические основы радиолокации./ Под ред | |||
| Ширмана Я.Д | |||
| Сов.радио, 1970, с.276, 278 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2092868C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2099738C1 |
| US 4044352 A2, 23.08.77. | |||

