Изобретение относится к области радиолокации и может быть использовано в перспективных РЛС для управления воздушным движение и для контроля воздушного пространства.
Необходимым условием обеспечения этого управления и контроля является знание точных координат всех объектов, находящихся в воздушном пространстве и возможность разрешения близкорасположеных (групповых) объектов. Для этого разрешающая способность по угловым координатам должна составлять 1-2o, а по дальности десятки метров.
Классический способ измерения координат основан на регулярном последовательном обзоре пространства с помощью РЛС, имеющей антенну с игольчатой формой диаграммы направленности (ДНА). Обычно угловой размер этого пространства составляет Δ В=360o по азимуту и D E=30o по углу места.
Высокую разрешающую способность по дальности обеспечивают при этом за счет применения широкополосных сигналов (Справочник по радиолокации под ред. М. Сколника, М. Сов.радио, 1976, т.1, с.16). А разрешающую способность по угловым координатам обеспечивают за счет применения антенны соответствующих размеров, поскольку разрешение определяется шириной луча ДНА, которая в свою очередь пропорциональна отношению  (λ длина волны РЛС, D линейный размер апертуры антенны).
(λ длина волны РЛС, D линейный размер апертуры антенны).
Требуемое разрешение по углам 1-2o с помощью антенны реальных размеров можно обеспечить в S-диапазоне (частота 2000-4000 МГц) (см. там же, с.21).
Таким образом, известный способ обнаружения и измерения координат объектов с требуемыми точностями основан на обзоре заданного пространства РЛС не ниже S-диапазона.
Работа всех наиболее распространенных современных РЛС основана на этом способе, например РЛС RAT-31S (l=10 см) ("Радиоэлектроник за рубежом", N 17, 1980, с.23), используемая в системах УВД и ПВО. Размер антенны этой РЛС 4 х 4 м, ширина луча в горизонтальной плоскости 1,5o, в вертикальной 1,5-3o. Обзор пространства по азимуту обеспечивается механическим вращением ФАР со скоростью 6 и 10 об/мин. Эта РЛС обеспечивает обнаружение воздушного объекта с эффективной площадью рассеяния (ЭПР) s 3 м2 на дальности до 100 км.
Недостаток этого способа состоит в том, что в диапазоне трудно обнаруживаются малозаметные объекты, под которыми имеются в виду как летательные аппараты с малыми линейными размерами, т.е. с малой s так и объекты, созданные по технологии, обеспечивающей, их слабую радиозаметность, например, по технологии Stealth (Interavia, 1987, IV, p.331-333), что эквивалентно также малому значению s.
Так, если ЭПР малозаметного объекта составляет, например, величину 0,1 м2, то дальность обнаружения его РЛС RAT-31S составит 45 км. Для обеспечения дальности его обнаружения 100 км за счет накопления энергии сигналов необходимо было бы увеличить период обзора в 30 раз, что недопустимо.
Известен способ обнаружения и измерения координат на основе приема излучений радиоэлектронных средств объекта в коротковолновом S-диапазоне (Теоретические основы радиолокации под ред. Я.Д.Ширмана, М. Сов.радио, 1970, с. 494). Поскольку дальность до источника излучения из-за отсутствия информации о времени излучения не может быть определена по данным приема только в одном пункте, то для определения всех координат одного объекта требуется комплекс не менее, чем из двух РЛС, а если объектов несколько, то возникает неоднозначность в измерении, для устранения которой требуется большее их число.
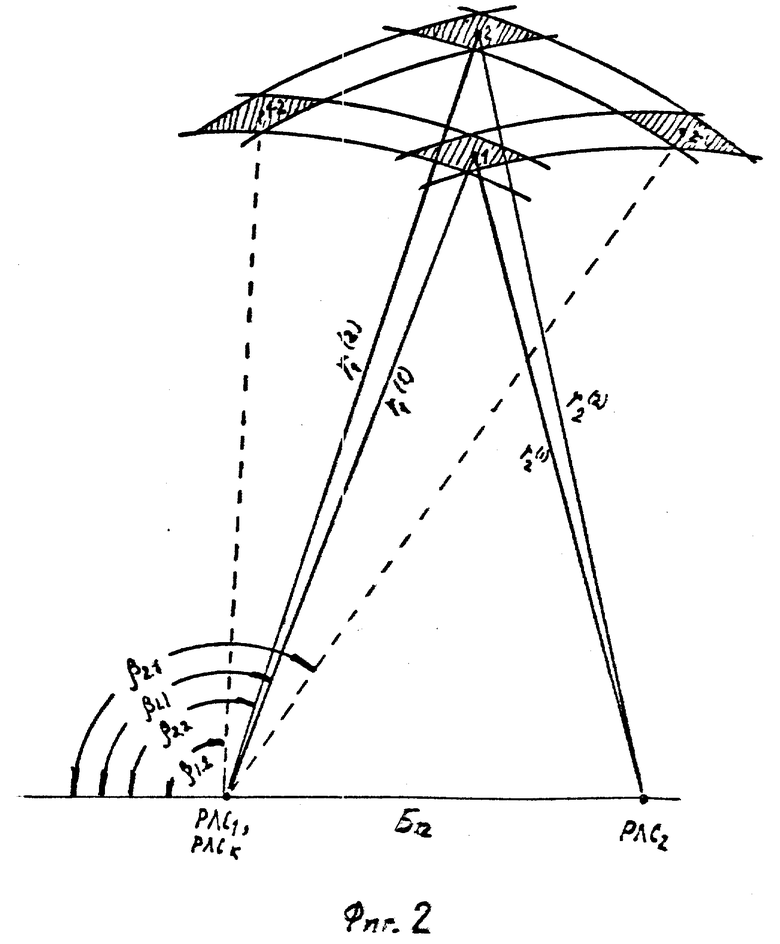
На фиг. 1 дано пояснение триангуляционного метода (там же) определения координат излучающего объекта в горизонтальной плоскости, имея в виду, что высота полета объекта (точка 1) H<<r1,r2 (r1,r2 дальность, соответственно РЛС1 и РЛС2 до объекта), т.е. что объект находится под углом места e1≈ ε2≈ 0 к РЛС1 и РЛС2.
С помощью РЛС1 и РЛС2 измеряют угловые направления β1 и β2 приема излучений объекта из точки 1. Дальность до объекта вычисляют из соотношений: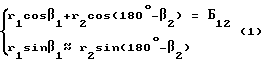
где Б12 расстояние между РЛС.
Недостаток этого способа в том, что объекты нерегулярно излучают сигналы, а некоторые вообще могут их не излучать.
Наиболее близким техническим решением является способ обнаружения и измерения координат малозаметных объектов, основанный на обнаружении и измерении дальности до них длинноволоновой РЛС. Так, например, радиолокатор УВЧ-диапазона (длинноволновый диапазон), установленный на самолетах "Хокай", позволит обнаруживать перспективные летательные аппараты (ЛА) со сниженной радиозаметностью БИНТИ N 46 (2291), ТАСС 12.11.86), поскольку современные ЛА имеют в УВЧ-диапазоне ЭПР в 7 раз выше, чем в S диапазоне, а для перспективных ЛА, созданных с применением методов снижения радиозаметности (имеется в виду технология Stealth) эта разница составит 100 раз. Известно (Interavia, 1987, IV, c.331-333), что указанная технология позволяет обеспечить маскировку ЛА в сантиметровом и дециметровом диапазонах волн, но ее эффективность значительно уменьшается при увеличении длины волны, что, практически, приводит к потере целесообразности технологии при переходе в метровый диапазон волн.
Кроме того, повышается эффективность обнаружения длинноволновыми РЛС любых объектов с малыми линейными размерами. В статье Effect of Radar Frequenay on the Detection of Shaped (Low RCS) Targets D.Moraitis, S.Alland - IEEE, 1985, Radar 85, p.159- 162 показано, что ЭПР многих радиолокационных объектов может быть представлено зависимостью:
σ~λn
где s ЭПР объектов,
l -длина волны РЛС,
n фактор формы объекта.
Для форм объекта с низкой ЭПР n=2. Показано, что дальность обнаружения малозаметных объектов длинноволновыми РЛС увеличивается в 1,75 раза по сравнению с РЛС S-диапазона и в 2,2 раза по сравнению с РЛС C-диапазона.
Недостаток способа-прототипа обнаружения малозаметных объектов с помощью длинноволновой РЛС состоит в низкой точности измерения и разрешения их по угловым координатам при реальных для транспортируемых РЛС размерах антенны. Так, РЛС метрового диапазона с размерами антенны РЛС RAT-31S будет иметь ширину луча 20-30o.
Заявляемое изобретение направлено на решение следующей задачи: повышение точности измерения и разрешения по угловым координатам малозаметных объектов.
Эта задача решается путем обзора пространства с помощью коротковолновой РЛС в ограниченной зоне.
Указанный результат достигается тем, что в известном способе обнаружения и измерения координат малозаметных объектов, основанном на обнаружении и измерении дальности до них в длинноволновом радиолокационном диапазоне, согласно изобретению дальность измеряют из K≥2 разнесенных в пространстве точек в длинноволновом диапазоне и на основе измерений вычисляют угловые координаты объектов, а в коротковолновом диапазоне обеспечивают разрешение объектов и устраняют неоднозначность.
Таким образом, суть изобретения состоит в следующем. Каждая из K≥2 длинноволновых РЛС обнаруживает объект и измеряет до него дальность ri с точностью  при i=1-K. На основе измеренных дальностей до объекта и известных расстояний между каждой i-й и j-й РЛС равных Бij при i,j=1-K и i≠j вычисляют угловые координаты участников пространства, где по данным длинноволновых РЛС могут находится объекты. С помощью коротковолновых РЛС просматривают эти участки в интервале времени, достаточном для обнаружения малозаметных объектов коротковолновой РЛС, уточняют их угловые координаты, устраняя зоны неоднозначности, возникающие при наличии m>1 объектов, неразрешаемых по углам каждой из длинноволновых РЛС, за счет пересечения зон обнаружения каждого из m объектов каждой из К РЛС.
при i=1-K. На основе измеренных дальностей до объекта и известных расстояний между каждой i-й и j-й РЛС равных Бij при i,j=1-K и i≠j вычисляют угловые координаты участников пространства, где по данным длинноволновых РЛС могут находится объекты. С помощью коротковолновых РЛС просматривают эти участки в интервале времени, достаточном для обнаружения малозаметных объектов коротковолновой РЛС, уточняют их угловые координаты, устраняя зоны неоднозначности, возникающие при наличии m>1 объектов, неразрешаемых по углам каждой из длинноволновых РЛС, за счет пересечения зон обнаружения каждого из m объектов каждой из К РЛС.
Суть изобретения поясняется фиг.2 на примере двух длинноволновых РЛС1 и РЛС2 и двух объектов. При этом для упрощения принято, что высота полета объектов H<<ri.
На фиг. 2 точками 1 и 2 обозначены объекты, а заштрихованными участками вокруг каждой из них неопределенности положения объектов. Заштрихованные участки 1-2 и 2-1 обозначают области "ложного" положения объектов, образующиеся в пределах лучей ДНА РЛС1 и РЛС2 за счет пересечения участков пространства по дальности, где РЛС1 и РЛС2 обнаружили объекты. Точкой РЛСк обозначена коротковолновая РЛС, ширина луча ДНА которой Δβk<< Δβ1,Δβ2 и которая для упрощения совмещена с точкой положения РЛС1.
По данным r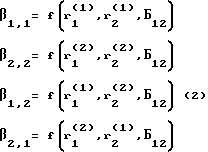
На основе соотношений треугольника получим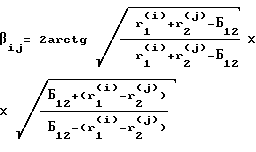
где i,j номера объектов.
Азимут истинного положения объектов определяется при i=j, а ложного при j≠j, т.е. в азимутальных направлениях β1,2 и β2,1 объекты отсутствуют. При m неразрешаемых РЛС1 и РЛС2 по азимуту, но разрешаемых по дальности групповых объектах общее число пересечений равно m2.
С помощью коротковолновой РЛСк, например, S-диапазона просматривают только угловые направления 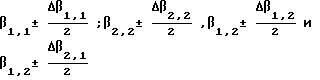 вместо всей заданной ΔB×ΔE обнаруживают объекты 1 и 2 в направлениях β1,1 и β2,2 уточняют их координаты, устраняя неоднозначности в направлениях β1,2 и β2,1.
вместо всей заданной ΔB×ΔE обнаруживают объекты 1 и 2 в направлениях β1,1 и β2,2 уточняют их координаты, устраняя неоднозначности в направлениях β1,2 и β2,1.
При появлении новых объектов процесс разрешения объектов с помощью коротковолновой РСЛк повторяется.
Таким образом, длинноволновые РЛС обеспечивают обнаружение малозаметных объектов за счет того, что величина их ЭПР в длинноволновом диапазоне достаточна; коротковолновая РЛСк может обнаружить эти объекты, несмотря на то, что их ЭПР в коротковолновом, например, S-диапазоне существенно меньше, за счет того, что вместо осмотра РЛСк всей заданной зоны ΔB×ΔE необходимо лишь просмотреть зоны пересечений по дальности, где РЛС1 и РЛС2 обнаружили объекты. При этом, если суммарный размер пространства этих зон составит величину ΔBs×ΔEs выигрыш в сокращении объема пространства для просмотра РЛСк за счет предлагаемого способа составит величину
Величина ΔBs×ΔEs находится из выражения:
где mr, mo соответственно число групповых и одиночных новых объектов, появляющихся за один период обзора РЛСк,
Кг число разрешаемых РЛС и РЛС по угловым координатам групп новых объектов.
Или
ΔBs×ΔEs≃ (Kг•m
где ΔΒ•Δε среднее значение углового размера пространства, где по данным длинноволновых РЛС могут находиться объекты.
Для положения объектов в одной плоскости при e 0 получим:
ΔBs×ΔEs= (Kг•m
где Δεк размер луча РЛСк по углу места.
Можно показать, что для случая, когда объект расположен на оси симметрии к РЛС1 и РЛС2 (т.е. r1=r2=r) и r>>Б1,2:
где
Δr1,Δr2 размер по дальности зоны неопределенности положения объекта по данным, соответственно, РЛС1 и РЛС2, привязанным к одному моменту времени.
Если измерение дальности до объекта производится РЛС1 и РЛС2 одновременно, то
Δr1= Δrт1;Δr2= Δrт2 (6)
где Δrт1,Δrт2 точность измерения дальности до объекта, соответственно РЛС1 и РЛС2.
На основании выражений (3)-(6) получим
Для РЛС RAT-31S и ΔB×ΔE 360•30, Δrт1= Δrт2 50 м, Б12=5 км
Отсюда следует, что РЛС RAT-31S может обнаруживать и разрешать объекты с σ 0,1 м2 на дальности в 100 км (т.е. когда hs ≥30), если
Kг•m
или, если каждый период обзора РЛС RAT-31S (каждые 6-10 с) будет появляться либо 15 групповых объектов по 3 в группе, либо 140 одиночных объектов.
Приведенный расчет для двух разнесенных в пространстве точек расположения РЛС (К=2) справедлив в случае, когда объекты расположены по линии симметрии точек. По мере отклонения от этой линии размер Δβ будет увеличиваться и достигнет наибольшего значения при совпадении линий расположения объектов и точек. Поэтому при К=2 точки располагают по нормали к направлению наиболее интенсивного движения объектов в наиболее удаленной контролируемой зоне. Если таких направлений несколько, то для уменьшения среднего значения Db а также для уменьшения числа зон ложного положения объектов целесообразно обеспечить K>2.
Изобретение относится к области радиолокации и может быть использовано в перспективных РЛС для управления воздушным движение и для контроля воздушного пространства. В основу изобретения положена техническая задача повышения точности измерения и разрешения по угловым координатам малозаметных объектов. Для этого в известном способе обнаружения и измерения координат малозаметных объектов, основанном на обнаружении и измерении дальности до них в длинноволновом диапазоне, дальность измеряют из К≥2 разнесенных в пространстве точек в длинноволновом диапазоне и на основе измерений вычисляют угловые координаты объектов, а в коротковолновом диапазоне обеспечивают разрешение объектов. 2 ил.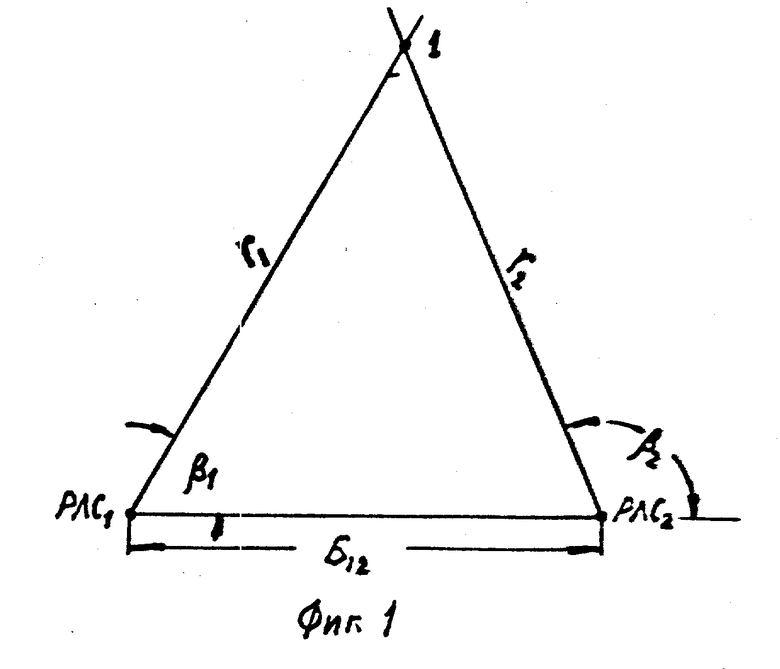
Способ обнаружения и измерения координат малозаметных объектов, основанный на обнаружении и измерении дальности до них длинноволновой РЛС и передаче данных о координатах коротковолновой РЛС, отличающийся тем, что дальность измеряют с помощью К ≥ 2 длинноволновых РЛС, разнесенных в пространстве, и на основе измерений из соотношений сторон треугольника, образованных измеренными расстояниями и известными расстояниями между РЛС, вычисляют угловые координаты объектов, передают координаты коротковолновой РЛС, с помощью которой просматривают области пространства с этими координатами, устраняют ложно обнаруженные объекты и ведут сопровождение длинноволновыми РЛС.
| Теоретические основы радиолокации /Под ред | |||
| Я.Д.Ширмана, - М.: Сов.радио, 1970, с | |||
| Прибор для штрихования | 1923 |
|
SU494A1 |
| Interavia, 1987, IV, р.331 - 333. | |||

