Изобретение относится к области электротехники и может быть использовано, например, в системах связи, телевидения автоматики. Преимущественная область применения обработка амплитудно-модулированных сигналов в системах автоматического управления с использованием цифровых вычислительных машин.
Известен способ модуляции, заключающийся в том, что модулированный сигнал опрашивают с частотой, в несколько раз выше частоты несущей, в вычислительной машине по зависимостям теоремы Котельникова (с учетом того, что амплитудно-модулированный сигнал представляет собой произведение несущей на модулирующую функцию, при необходимости смещенную ([6] с. 72-74) форму модулирующей функции восстанавливают по выборке значений амплитудно-модулированного сигнала [1] Недостатком этого способа является необходимость высокой частоты дискретизации, как правило, превышающей частоту несущей не менее, чем в 5 раз. Кроме того, для восстановления сигнала требуется большое число опросов (большой объем памяти) и использование тригонометрических функций, что увеличивает время решения задачи. Несмотря на эти сложности, из-за отсутствия информации о несущей точность демодуляции ограничена допуском на параметры несущей.
Известен способ демодуляции сигнала, заключающийся в том, что амплитудно-модулированный сигнал умножают на несущую, отфильтровывают высокочастотные составляющие и масштабируют с учетом параметров фильтра [4] Недостатком этого способа является то, что при изменении амплитуды несущей погрешность восстановления модулирующей функции изменяется пропорционально квадрату относительного изменения амплитуды несущей.
Известен также способ демодуляции амплитудно-модулированного сигнала, заключающийся в том, что амплитудно-модулированный сигнал умножают на сигнатуру несущей, отфильтровывают высокочастотные составляющие и масштабируют с учетом параметров фильтра ([5] с. 80,81). При изменении амплитуды несущей погрешность восстановления модулирующей функции изменяется пропорционально изменению амплитуды несущей.
Известен, кроме того, способ демодуляции амплитудно-модулированного сигнала, когда из него выделяют составляющую на частоте несущей, умножают амплитудно-модулированный сигнал на эту составляющую, отфильтровывают высокочастотные составляющие ([6] с. 254,255). Этот способ имеет следующие недостатки:
во-первых, он не чувствителен к фазе несущей, при этом фильтр, ее выделяющий, может вносить дополнительные фазовые погрешности;
во-вторых, поскольку амплитуда несущей остается неизвестной, масштабирование может быть осуществлено только качественно. Эти недостатки не позволяют использовать такой способ демодуляции в устройствах автоматики из-за неопределенности как величины коэффициента передачи демодулятора, так и его знака.
Наиболее близким к заявляемому техническому решению является описание в [2]
При использовании этого способа амплитудно-модулированный сигнал масштабируют, запоминают в моменты времени, когда несущая достигает наибольшего значения, а запомненное значение используют в качестве величины демодулированного сигнала. Из-за того, что при данном способе форма несущей и ее амплитуда подразумеваются неизменными, возникает ошибка, пропорциональная отклонению наибольшего значения несущей от априоры заданного уровня.
Как известно ([6] с. 74, формула (3.4), [7] с. 403, формула (9.13)), амплитудно-модулированный сигнал можно представить в виде произведения модулирующей функции на несущую:
UАМ=U•UH, (1)
где UАМ текущее значение амплитудно-модулированного сигнала;
U текущее значение модулирующей функции;
UH текущее значение несущей.
Пусть UH UMsin ft. Тогда максимум несущей достигается при sin ft 1 и равен UM. Значение демодулированного сигнала равно
UДМ UАМ (UH max) (2)
При этом коэффициент выбирается из условия
UДМ U, если max(UH) UMH, (3)
где UMH номинальное значение амплитуды несущей.
Если в процессе эксплуатации амплитуда несущей может меняться, то есть
UM kUMH, (4)
то 
Основным техническим результатом предлагаемого технического решения является повышение точности выделения модулирующей функции из амплитудно-модулированного сигнала. Дополнительным техническим результатом при использовании цифровой обработки является уменьшение частоты опроса ( до минимально необходимой для восстановления модулирующей функции) и числа операций, требуемых для выделения модулирующей функции. Кроме того, предлагаемый способ демодуляции не зависит от формы несущей и нечувствителен к ее изменениям.
Для достижения этих результатов способ демодуляции амплитудно-модулированного сигнала, заключающийся в масштабировании амплитудно-модулированного сигнала, периодическом его запоминании и использовании запомненного значения в качестве демодулированного сигнала (модулирующей функции) дополняют операциями измерения несущей и сравнения измеренного значения с заданным порогом, при этом амплитудно-модулированный сигнал запоминают в моменты времени, когда несущая становится равной пороговому значению, а коэффициент масштабирования устанавливают обратно пропорциональным значению пороговой величины.
Как следует из (1), при реализации предлагаемого способа модулированный сигнал делится на текущее, точно известное значение несущей:
Тем самым исключается ошибка, вызванная флуктуациями несущей (как отклонениями формы, так и амплитуды). При этом, поскольку уровень порога задается заранее, операция деления фактически заменяется операцией умножения на постоянный коэффициент (операцией масштабирования). Это позволяет достаточно просто реализовать предлагаемый способ на практике, т.к. даже при реализации с использованием аналоговой элементной базы могут использоваться относительно дешевые и точные операционные усилители, а не блоки умножения-деления. Следует также отметить, что при соответствующем выборе порогового значения при цифровой реализации операция деления может быть заменена операцией сдвига, выполняемой гораздо быстрее.
Были рассмотрены различные варианты устройств, на базе которых мог бы быть реализован предложенный способ. Наиболее близким по числу совпадающих признаков признан пиковый детектор, описанный в [3] Этот демодулятор содержит последовательно соединенные масштабирующий усилитель, на вход которого подан амплитудно-модулированный сигнал и запоминающий блок. Запоминающий блок представляет собой апериодическое RC-звено, вход которого через транзисторный ключ соединен с выходом масштабирующего усилителя. Управление транзисторным ключом осуществляется по сигналам с пикового детектора, на вход которого подается несущая. Как указывается в [8] с. 403, пиковое значение это наибольшее значение какой-либо величины. Пиковый детектор, описанный в [3] выделяет наибольшее по модулю значение отрицательной полуволны несущей. При этом производится сравнение текущего значения сигнала несущей с его предыдущим значением. После достижения экстремума пиковый детектор перезапускается вновь по достижении несущей некоторого наперед заданного значения, которое однако не используется для анализа демодулированного сигнала, т.к. запоминание очередного за период значения производится в момент времени, когда отрицательная полуволна несущей достигает локального экстремума.
Чтобы реализовать описанный выше способ демодуляции амплитудно-модулированного сигнала, в устройство, содержащее последовательно соединенные блок моделирования и запоминающий блок,необходимо ввести последовательно соединенные блок эталонного сигнала и блок сравнения, на второй вход блока сравнения подать сигнал несущей, а выход блока сравнения подключить ко входу управления записью запоминающего блока. Полученное устройство будет выполнять функции однополупериодного демодулятора.
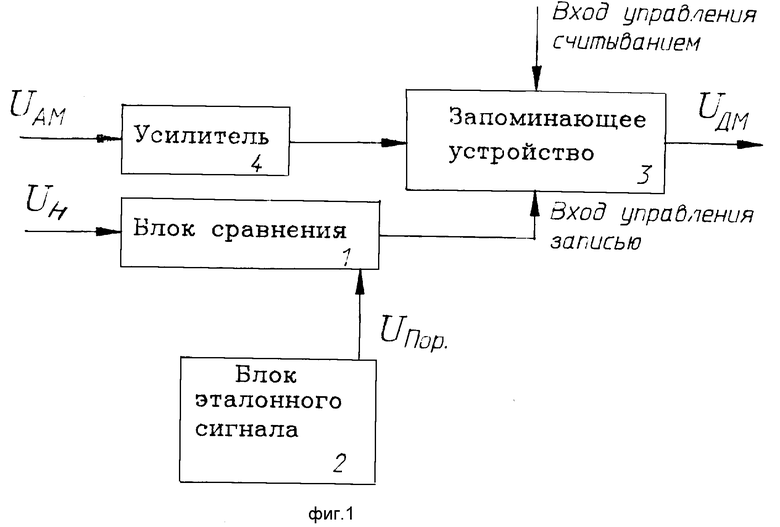
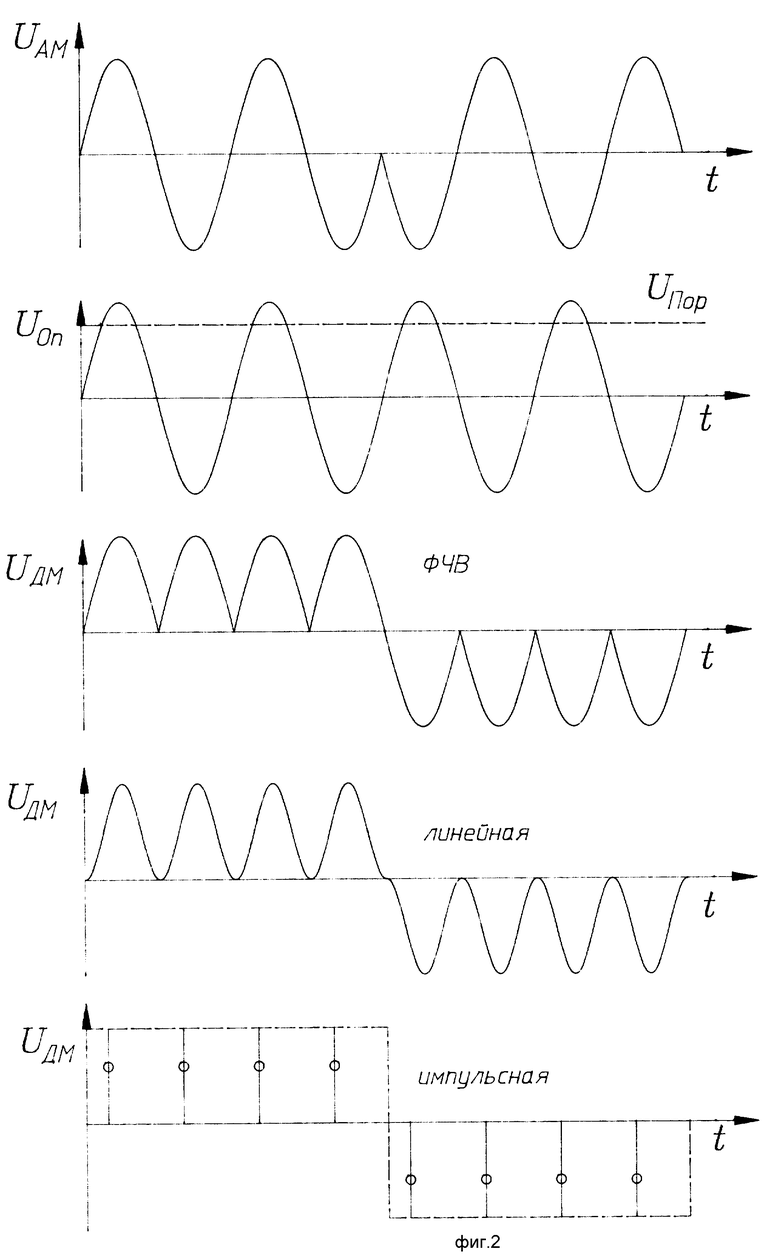
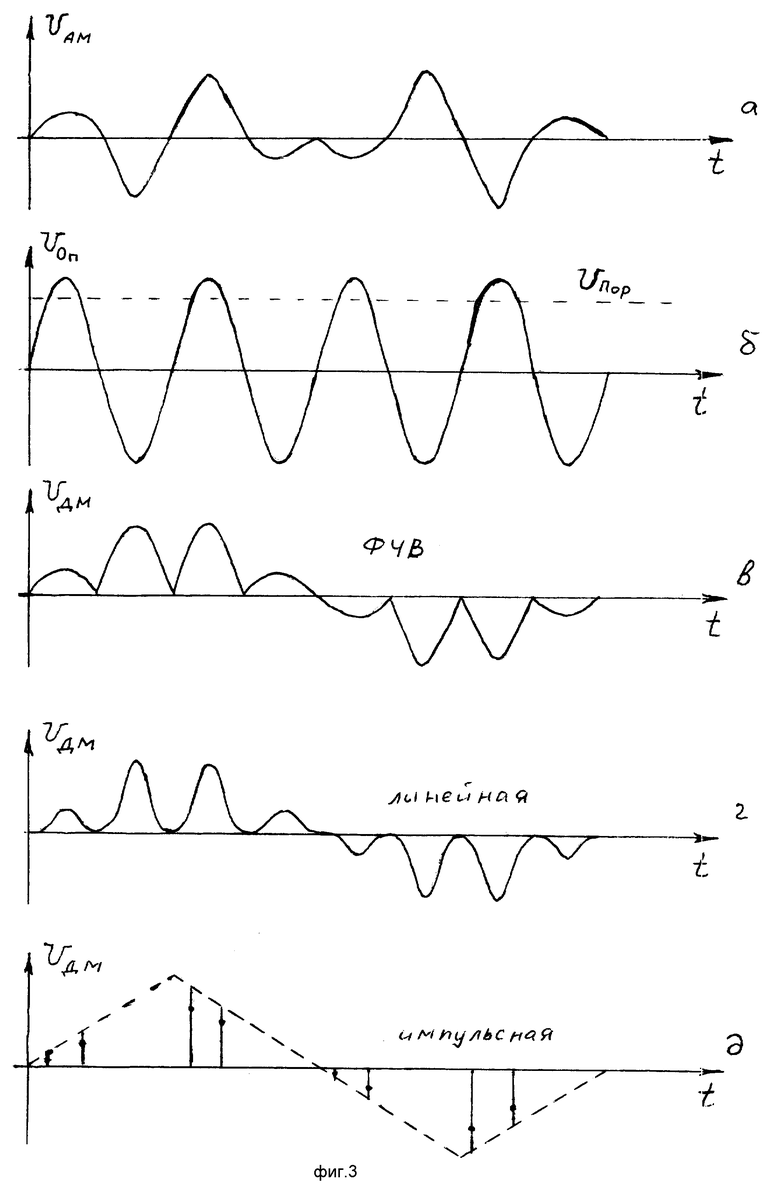
На фиг. 1 изображена функциональная схема однополупериодного демодулятора; на фиг. 2,3 эпюры модулированного и демодулированного разными способами сигнала, соответственно для меандровидной и треугольной модулирующих функций.
Однополупериодный демодулятор состоит из последовательно соединенных блока масштабирования 4 и запоминающего блока 3 и последовательно соединенных блока эталонного сигнала 2 и блока сравнения 1 (фиг. 1). Выход блока сравнения соединен со входом управления записью запоминающего блока. На вход блока масштабирования 4 подают амплитудно-модулированный сигнал, а на второй вход блока сравнения несущую.
Каждый из предлагаемых блоков в отдельности является известным: блок масштабирования может быть выполнен на операционном усилителе, блок запоминания аналогичен прототипу, блок эталонного сигнала на прецизионном выпрямителе, блок сравнения на нуль-индикаторе.
Рассмотрим работу однополупериодного демодулятора. С блока эталонного сигнала на блок сравнения поступает сигнал установленного уровня. На другой вход блока сравнения 1 подают сигнал несущей. При равенстве этих сигналов блок сравнения выдаст команду на вход управления записью запоминающего блока 3 (то есть блок сравнения выполняет функцию нуль-индикатора сравни [8] с. 305). На вход данных запоминающего блока 3 подается отмасштабированный в блоке масштабирования 4 амплитудно-модулированный сигнал. Очевидно, что мгновенное значение, зафиксированное в блоке 3, будет пропорционально величине и совпадать по знаку с модулирующей функцией.
Из формулы (1) следует, что
U UAM/UH. (5а)
В реальных технических системах эта зависимость не реализуется из-за неопределенности значения кратного деления при значениях несущей, близких к нулю. Обычно при синусоидальной форме несущей демодулятор выполняет функцию умножения амплитудно-модулированного сигнала на несущую или функцию сигнатуры несущей.
В первом случае
UДМ= U•U
Во втором случае
UДM U•UMsin ft sign (sin ft) (7)
То есть амплитуда демодулированного сигнала пропорциональна не только амплитуде модулирующей функции, но и амплитуде несущей. Формы демодулированных сигналов приведены на фиг. 3 (кривые в, г, д соответствуют случаям фазочувствительного выпрямителя формула (7), линейного демодулятора - формула (6), кривые а и б -соответственно амплитудно-модулированный сигнал и несущая). Если в процессе работы амплитуда несущей будет меняться, а коэффициент масштабирования демодулятора остается неизменным, то возникает ошибка тем большая, чем больше изменение несущей (формулы (6), (7)). Аналогично возникает ошибка при изменении амплитуды несущей и при использовании пиковых демодуляторов (формулы (2) (5)).
Чтобы исключить эту ошибку, нужно измерить несущую хотя бы один раз за период (или даже за несколько периодов) и в соответствии с (5а) в этот момент поделить амплитудно-модулированнный сигнал на измеренное значение несущей. Однако блок деления в общем случае достаточно сложен и, по крайней мере, в аналоговом исполнении имеет низкую точность. В предлагаемом устройстве операция деления заменена операцией масштабирования, поскольку деление осуществляется на наперед заданную постоянную величину, задаваемую пороговым значением.
Следует отметить, что величина порогового сигнала не должна быть больше номинального значения амплитуды несущей, уменьшенной на максимальную величину ее изменения, иначе блок сравнения не будет (при уменьшении амплитуды несущей ниже порога) выдавать сигнал даже по достижении несущей максимума. С другой стороны, чтобы результат демодуляции был точнее, особенно в цифровых системах, нужно, чтобы амплитудно-модулированный сигнал в момент деления был как можно больше, а, следовательно, в соответствии с (1) как можно большей в этот момент должна быть и несущая. Поэтому пороговое значение не может быть сколь угодно малым и его желательно максимизировать (по модулю). Иллюстративно на кривых кружками на импульсах демодулированного сигнала показано значение амплитудно-модулированного сигнала в момент измерения, а пунктиром огибающая демодулированного сигнала.
Записью результата масштабирования в запоминающий блок обеспечивается возможность использования результата демодуляции до следующего такта измерений. Необходимость фильтрации либо другой обработки полученного сигнала определяется требованиями внешних устройств, потребляющих демодулированный сигнал, и должна рассматриваться отдельно, так же как и управление считыванием.
Если коэффициент масштабирования выбран правильно, то в момент записи демодулированный сигнал точно равен модулирующей функции, т.к. учитывая сказанное выше, текущее значение несущей в этот момент точно равно пороговому значению. То есть коэффициент передачи блока масштабирования должен быть пропорционален (1/U), исходя из формулы (5а). Иными словами, обратно пропорциональным пороговому значению при прочих равных условиях.
Из изложенного видно, что использование способа демодуляции амплитудно-модулированного сигнала, при котором за значение модулирующей функции принимают значение амплитудно-модулированного сигнала, умноженного на величину, обратно пропорциональную опорному сигналу, в момент равенства несущей опорному сигналу, позволяет повысить точность демодуляции. На основе этого способа предложен однополупериодный демодулятор.
Источники информации:
1. Патент ФРГ N 38 16 568, 1989, МКИ H 03 D 1/00.
2. Заявка на патент Франции N 2 098 193, 1972, МКИ H 03 D 1/00.
3. Патент США N 3 651 419, HКИ 329-101, 1972.
4. Заявка на патент Японии N 63-30805, МКИ H 03 D 1/22.
5. Применение интегральных микросхем. Практическое руководство. Под ред. А. Уильямса, кн. 1.-М. Мир, 1987.
6. Гоноровский И.С. Радиотехнические цели и сигналы.-М. Радио и связь, 1986.
7. Херпи М. Аналоговые интегральные микросхемы.-М. Радио и связь, 1983.
8. Словарь радиолюбителя. Под ред. Л.П. Крайзмера.-Л. Энергия, 1972.
Способ модуляции амплитудно-модулированного сигнала состоит в следующем. Несущую амплитудно-модулированного сигнала сравнивают с пороговым значением. В момент равенства несущей пороговому значению запоминают значение предварительно отмасштабированного амплитудно-модулированного сигнала и используют запомненную величину в качестве демодулированного сигнала. При этом коэффициент масштабирования обратно пропорционален пороговому значению. Использование этого способа позволяет повысить точность демодуляции. Демодулятор амплитудно-модулированного сигнала, предназначенный для осуществления этого способа, содержит блок сравнения 1, блок эталонного сигнала 2, запоминающий блок 3 и блок масштабирования 4. 3 ил.