Изобретение относится к технологическому оборудованию для механизации и автоматизации технологических операций и может найти применение в цехах механической обработки, штамповки, ковки, на операциях подачи заготовок в рабочую зону станков.
Известен манипулятор, содержащий механическую руку, связанную с механизмом ее поворота относительно оси колонны. Недостатками известного устройства являются низкая надежность и сложность конструкции [1]
Известен манипулятор, содержащий механическую руку, связанную с механизмом ее поворота, выполненным в виде двух зацепленных друг с другом зубчатых колес с зацепленными на них пальцами, и диска с двумя пазами, кинематически связанного с механической рукой и с этими зубчатыми колесами [2]
Недостатком известного манипулятора являются низкие динамические характеристики при несогласованных линейных перемещениях руки.
Технической задачей изобретения является улучшение динамических характеристик манипулятора за счет совмещения линейных и вращательных движений звеньев, что повышает его быстродействие на 10% и точность.
Поставленная задача решается тем, что на корпусе манипулятора дополнительно установлен кривошип, палец которого через соединительное устройство связан с рукой таким образом, что квадрат расстояния между осями вращения кривошипа и колонны манипулятора больше суммы квадрата расстояния между осями вращения кривошипа и пальца кривошипа и квадрата расстояния между осями вращения колонны и пальца кривошипа при крайних положениях руки манипулятора по углу поворота.
Поставленная задача решается тем, что кривошип жестко закреплен на механизме поворота так, что их оси вращения совпадают, а рука установлена на корпусе манипулятора с возможностью ее свободного вращения.
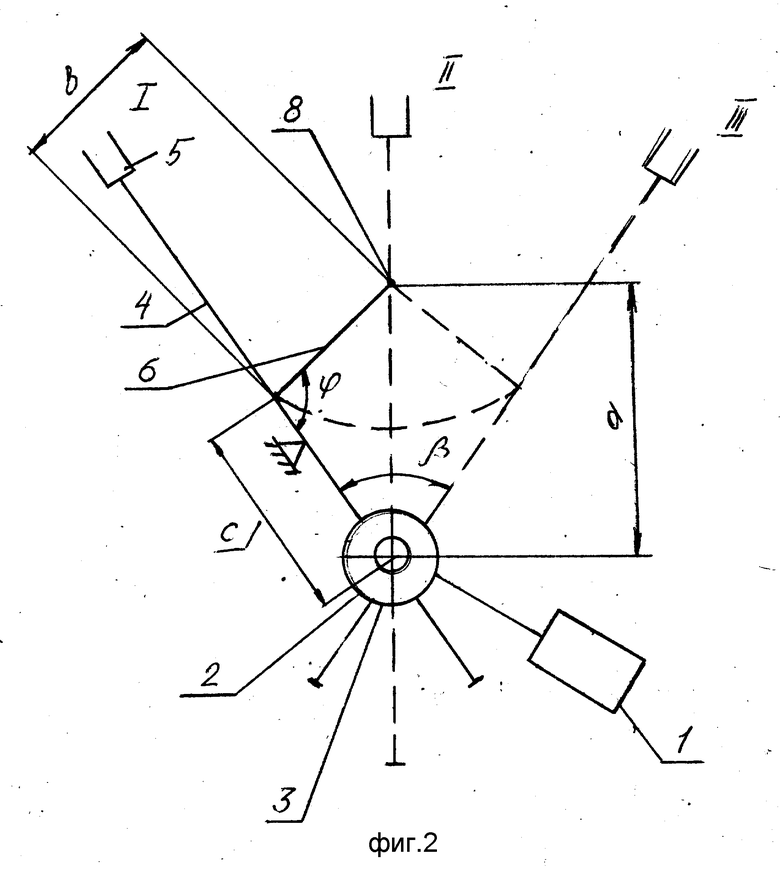
На фиг. 1 изображен общий вид устройства; на фиг. 2 то же, вид сверху.
Устройство содержит электродвигатель 1, мальтийский механизм 2, колонну 3, руку 4 с захватным устройством 5, кривошип 6, палец 7, соединительное устройство 8, выполненное в виде отверстия на руке 4. Причем квадрат расстояния (а) между осями вращения кривошипа 6 и колонны 3 манипулятора больше суммы квадрата расстояния (b) между осями вращения кривошипа 6 и пальца 7 кривошипа 6 и квадрата расстояния (с) между осями вращения колонны 3 и пальца 7 кривошипа 6 при крайних положениях руки манипулятора по углу поворота.
Выбор конкретных величин а, b осуществляется из необходимых значений угла β поворота колонны 3 и максимальной величины перемещения руки 4 при повороте путем геометрических построений из фиг. 1 и 2. Выполнение данного условия обеспечивает значение угла Φ > 90°, что необходимо для плавности режимов разгона и торможения. Если угол Φ = 90°, возможно заклинивание и неустойчивость системы. Если угол Φ < 90°, при повороте из положения I (фиг. 2) в положение II будет происходить выдвижение руки, и возникающая кориолисовая сила инерции тормозит выдвижение, а при перемещении из положения II в положение III втягивание, при котором кориолисовая сила инерции ускоряет торможение, что не обеспечивает улучшения динамических характеристик манипулятора.
Устройство, показанное на фиг. 1, работает следующим образом. В исходном состоянии колонна 3 повернута в крайнее положение (фиг. 2) так, что ось руки 4 занимает положение I. При этом электродвигатель 1 посредством мальтийского механизма 2 поворачивает колонну 3 и закрепленную на ней руку 4 с захватным устройством 5. Одновременно кривошип 6, палец 7 которого входит в соединительное устройство 8, будет перемещать центр масс руки 4 в направлении оси вращения колонны 3 (рука втягивается). Это обеспечивается тем, что в силу указанного в формуле изобретения условия а2 > b2 + c2, угол Φ>90° При этом уменьшается момент инерции относительно оси вращения колонны 3 и возникает кориолисова сила инерции, ускоряющая поворот колонны 3. В положении II оси руки 4 (фиг. 2) центр масс руки 4 находится на минимальном расстоянии от оси вращения колонны 3. После прохождения этого положения кривошип 6 обеспечивает перемещение центра масс руки 4 в направлении от оси вращения колонны 3 (рука выдвигается). При этом момент инерции возрастает и возникает кориолисова сила инерции, тормозящая вращение колонны 3. При достижении положения III (фиг.2) поворот заканчивается. При повороте из положения III в положение I манипулятор работает аналогично.
Таким образом, данные устройства обеспечивают более ускоренный разгон и более интенсивное торможение, что улучшает динамические характеристики и повышает быстродействие.
Источники информации
1. Авторское свидетельство СССР N 541664, кл. B 25 J 11/00, 1975 г.
2. Авторское свидетельство СССР N 831608, кл. B 25 J 11/00, 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1995 |
|
RU2093346C1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛА | 1992 |
|
RU2066859C1 |
| СПОСОБ УТИЛИЗАЦИИ АРТИЛЛЕРИЙСКИХ ГИЛЬЗ | 1994 |
|
RU2080244C1 |
| ЭНЕРГОСБЕРЕГАЮЩИЙ СПОСОБ ПОСТРОЕНИЯ СХЕМ ЭЛЕКТРОПРИВОДНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2380811C2 |
| ЛОПАТКА ВХОДНОГО УСТРОЙСТВА ГТД | 1998 |
|
RU2133850C1 |
| ГЕНЕРАТОР ЗВУКОВЫХ СИГНАЛОВ | 1993 |
|
RU2069389C1 |
| КОРРОЗИОННО-СТОЙКАЯ СТАЛЬ | 2000 |
|
RU2193073C2 |
| ПРЕСС ЛИСТОШТАМПОВОЧНЫЙ КРИВОШИПНЫЙ ДВОЙНОГО ДЕЙСТВИЯ | 2007 |
|
RU2355576C2 |
| ФОРМОВОЧНАЯ СМЕСЬ ДЛЯ ИЗГОТОВЛЕНИЯ ПРЕССОВАННОЙ ЛИТЕЙНОЙ ФОРМЫ | 1999 |
|
RU2183529C2 |
Изобретение относится к технологическому оборудованию для механизации и автоматизации технологических операций и может найти применение в цехах механической обработки, штамповки, ковки, на операции подачи заготовок в рабочую зону станков. Устройство содержит электродвигатель 1, мальтийский механизм 2, колонну 3, руку 4 с захватным устройством 5. Кривошип 6 с пальцем 7 через соединительное устройство 8 связан с рукой 4. За счет выбора расстояний между осями вращения колонны, кривошипа и пальца кривошипа достигается ускоренный разгон и интенсивное торможение руки 4 манипулятора. 2 ил.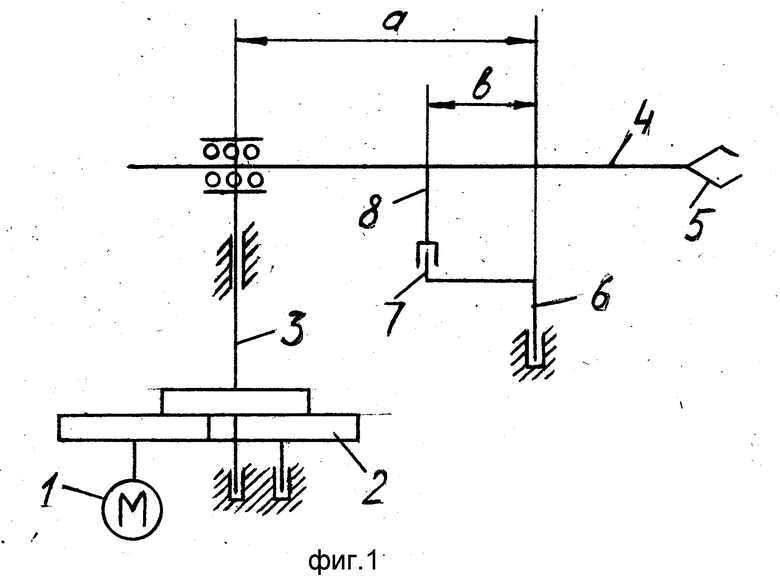
Манипулятор, содержащий корпус, колонну, механическую руку, связанную с механизмом ее поворота относительно оси колонны, отличающийся тем, что на корпусе манипулятора дополнительно установлен кривошип, палец которого через соединительное устройство связан с рукой таким образом, что
a2 > b2 + c2,
где a расстояние между осями вращения колонны и кривошипа;
b расстояние между осями вращения кривошипа и его пальца;
c расстояние между осями вращения колонны и пальца кривошипа при крайних положениях руки манипулятора по углу поворота.
| Манипулятор | 1975 |
|
SU541664A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
