Заявляемое изобретение относится к технологическому оборудованию для механизации и автоматизации технических операций и может найти применение в цехах механической обработки, штамповки, ковки, на операциях подачи заготовок в рабочую зону станков.
Известен манипулятор, содержащий механическую руку, связанную с механизмом ее поворота относительно оси колонны. Недостатками известного устройства являются низкая надежность и сложность конструкции [1]
Известен манипулятор, содержащий механическую руку, связанную с механизмом ее поворота, выполненный в виде двух зацепленных друг с другом зубчатых колес с закрепленными на них пальцами, и диска с двумя пазами, кинематически связанного с механической рукой и с этими зубчатыми колесами [2]
Недостатком известного манипулятора являются ограниченные технологические возможности ввиду отсутствия перемещения руки вверх-вниз.
Технической задачей изобретения является улучшение технологических возможностей и улучшение динамических характеристик.
Поставленная задача решается тем, что манипулятор, содержащий механическую руку, связанную с механизмом ее поворота, выполненным в виде двух зацепленных друг с другом зубчатых колес с закрепленными на них пальцами, и диска с двумя пазами, кинематически связанного с механической рукой и с этими зубчатыми колесами, дополнительно снабжен валом, проходящим внутри колонны, в нижней части которого установлено зубчатое колесо, связанное с дополнительными зубчатыми секторами, расположенными на осях колес с пальцами, а в верхней части расположен пространственный кулачок, который кинематически связан с роликом, установленным на внутренней стороне цилиндра, жестко связанного с рукой манипулятора.
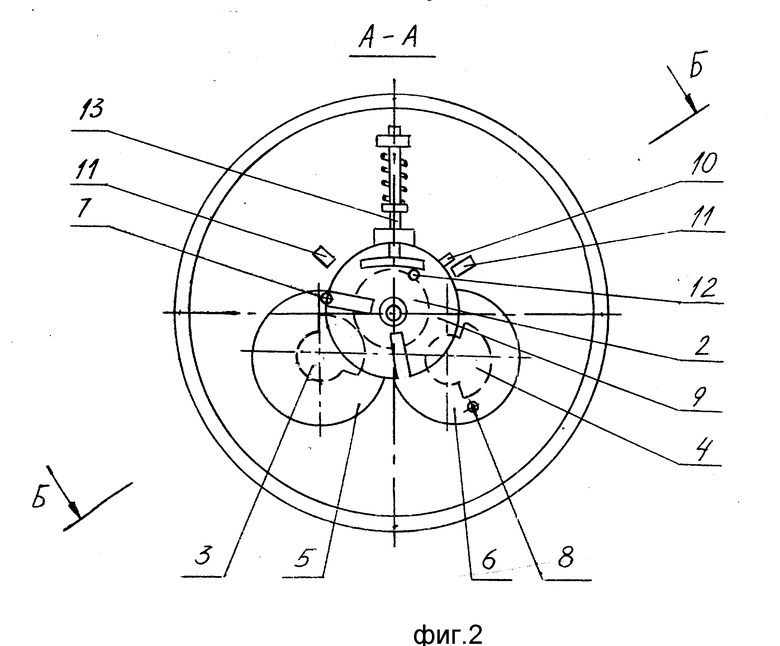
На фиг. 1 показан манипулятор, разрез Б-Б на фиг. 2; на фиг. 2 разрез А-А на фиг. 1.
Устройство содержит корпус 1, в котором размещен механизм поворота, содержащий дополнительное зубчатое колесо 2 и находящиеся с ним в зацеплении зубчатые сектора 3 и 4, установленные на валах основных зубчатых колес 5 и 6 с закрепленными на них пальцами 7 и 8, а также диск 9 с двумя пазами под эти пальцы. На двухпазовом диске 9 установлен рычаг 10, а на корпусе два регулируемых упора 11. Ролик 12, установленный на двухпазовом диске 9, контактирует с криволинейной поверхностью подпружиненного толкателя 13. Манипулятор снабжен валом 14, проходящим внутри колонны 15, в верхней части которого расположен пространственный кулачок 16, кинематически связанный с роликом 17, установленным на внутренней стороне цилиндра 18, жестко связанного с рукой 19 манипулятора.
Манипулятор работает следующим образом.
В исходном состоянии рука 19 находится в одном из крайних положений по повороту и опущена. Двигатель сообщает зубчатому сектору 3 и основному колесу 5 с установленным на нем пальцем 7 вращательное движение. От сектора 3 движение передается валу 14 посредством жестко закрепленного на нем дополнительного зубчатого колеса 2, находящегося в зацеплении с зубчатым сектором 3. Вал 14 вращает пространственный кулачок 16, который приводит в движение посредством кинематически связанного с ним ролика 17 цилиндр 18, тем самым осуществляя подъем руки 19. Затем в зацепление входит палец 7, и осуществляется поворот колонны 15 вместе с рукой 19. Далее зацепление с дополнительным колесом 2 входит зубчатый сектор 4и рука опускается. Далее цикл повторяется аналогично описанному. Фиксация вала 14 в крайних положениях осуществляется при помощи устройства, содержащего подпружиненный толкатель 13 и ролик 12.
Источники информации:
1. Авторское свидетельство СССР N 541664, кл. B 25 J 11/00, 1975.
2. Авторское свидетельство СССР N 831608, кл. B 25 J 11/00, 1981. 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1994 |
|
RU2093345C1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| СПОСОБ УТИЛИЗАЦИИ АРТИЛЛЕРИЙСКИХ ГИЛЬЗ | 1994 |
|
RU2080244C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛА | 1992 |
|
RU2066859C1 |
| ЛОПАТКА ВХОДНОГО УСТРОЙСТВА ГТД | 1998 |
|
RU2133850C1 |
| Манипулятор | 1979 |
|
SU831608A1 |
| Манипулятор | 1980 |
|
SU918083A2 |
| ЭНЕРГОСБЕРЕГАЮЩИЙ СПОСОБ ПОСТРОЕНИЯ СХЕМ ЭЛЕКТРОПРИВОДНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2380811C2 |
| КОРРОЗИОННО-СТОЙКАЯ СТАЛЬ | 2000 |
|
RU2193073C2 |
| ГЕНЕРАТОР ЗВУКОВЫХ СИГНАЛОВ | 1993 |
|
RU2069389C1 |
Изобретение относится к области робототехники. Манипулятор может найти применение в операциях подачи заготовок в рабочую зону станков. Он содержит колонну 15 с проходящим внутри валом 14, в нижней части которого установлено зубчатое колесо, связанное с дополнительными зубчатыми секторами, расположенными на осях колес с пальцами. В верхней части вала расположен пространственный кулачок 16, который кинематически связан с роликом, установленным на внутренней стороне цилиндра 18, жестко связанного с рукой 19 манипулятора. 2 ил.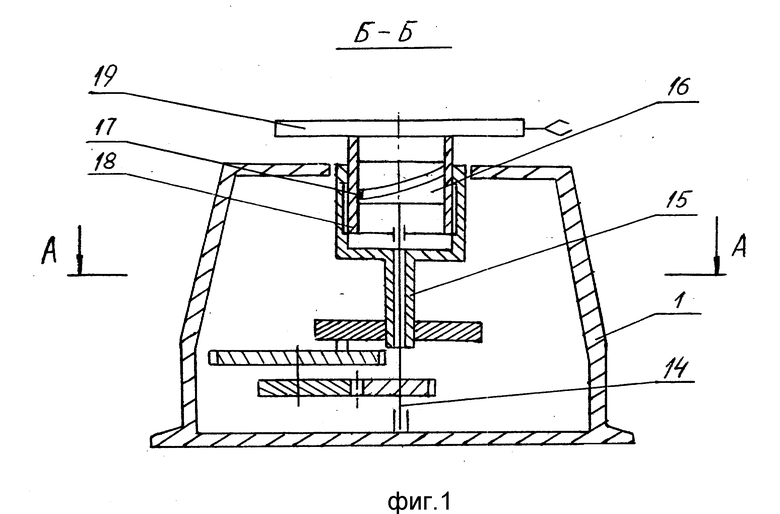
Манипулятор, содержащий колонну, механическую руку, связанную с механизмом ее поворота, выполненным в виде двух находящихся в зацеплении основных зубчатых колес с закрепленными на них пальцами и диска с двумя пазами под эти пальцы, кинематически связанного с механической рукой, отличающийся тем, что он снабжен жестко связанным с механической рукой полым цилиндром, двумя зубчатыми секторами, установленными на валах основных зубчатых колес, и валом с расположенными в верхней его части пространственным кулачком и в нижней дополнительным зубчатым колесом, кинематически связанным с зубчатыми секторами, при этом упомянутый вал расположен внутри колонны, а на внутренней поверхности цилиндра закреплен дополнительно введенный ролик, предназначенный для взаимодействия с пространственным кулачком.
| Манипулятор | 1979 |
|
SU831608A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
