1
Иаобретекие относится к машкностроеекию, а именно к устройствам дпя пере мешения изделий из одной точки в другую в процессе механообработки или сборки.
Известны манипуляторы, содержащие
установлекную с воамояшостью вертикального перемещения и вращения вокруг вертикальной оси колонну, на которой закреплена механическая рука. Общим не,достатком. этих манипуляторов является увеличенная мощность привода вертикального перемещения, необходимая для преодоления сил трения в вертикальных нанравпяющпх, возникающих под действием, боковых усилий от консольного нагружени руки 1,
Цель изобретения - уменьшение мощности привода вертикального перемещения за счет устранения боковых усилий в вертикальных направляющих, вызывающи появление сил трения, препятствующих вертикал;ьном перемещению стоек.
Это достигается тем, что основание, содержащее вертикальные направляющие
дпя стоек, выполнено с возможностью вращения вокруг вертикальной оси, механическая рука соединена со стойками щарнирно, а на стойках закреплены рейки, кинематически связанные с приводом вертикального перемещения, например, при помощи щестерен, соединенных жестким валом.
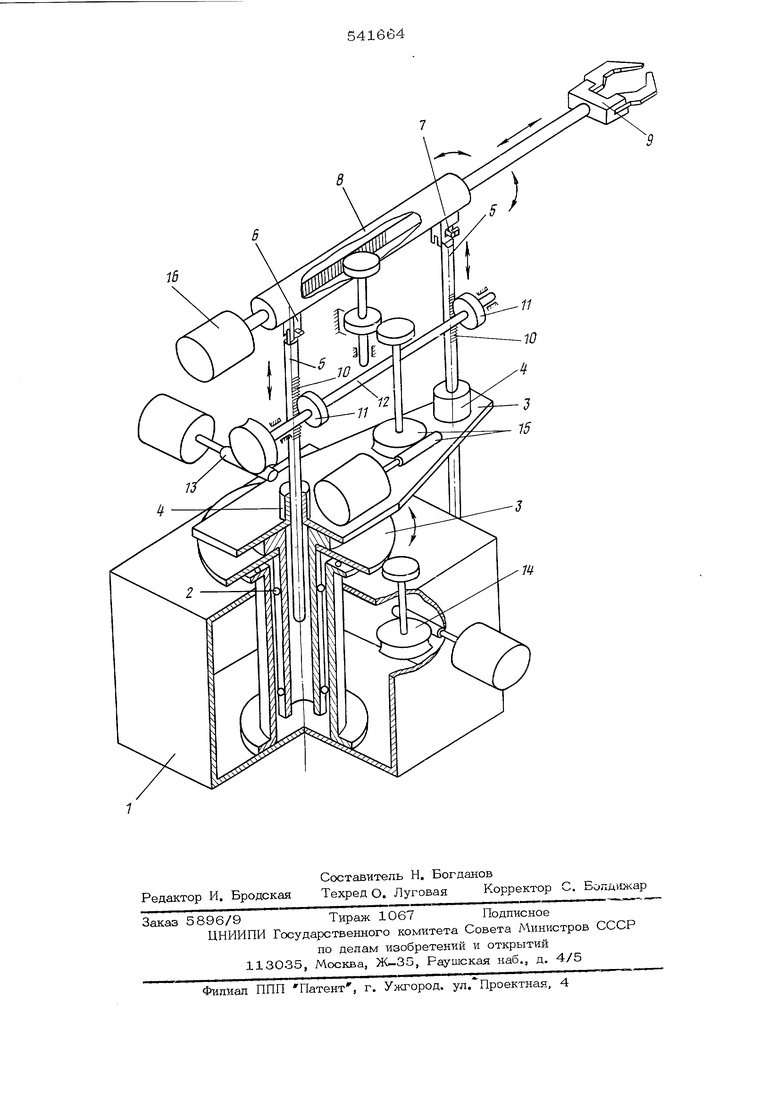
На чертеже изображен предлагаемый манипулятор, обгдий вид.
В неподвижном, корпусе 1 установлено в подщипниках 2 с возможностью вращения вокруг вертикальной оси основание 3 с направляющими 4, в которых смонтированы вертикальные стойки 5. На стойках 5 закреплена при помощ.и щарниров 6 и 7 раздвижная механическая рука 8, снабженная на конце захватом 9. На сто ках 5 закреплены рейки Ю, взаимодействующие с щестернями 11, соединенными между собой жестким валом 12 и связанными с приводом, вертикального перемещения 13, выполненным, наприм.ер, в виде электродвигателя с червячным редуктором и установленным на основании 3. Манипулятор содержит также привод 14 поворота основания, привод 15 раздвижения руки и привод 16 зажиме. Манипулятор работает следующим образом. При взятии детали захватом, 9 на кон це руки 8 возникает вертикальная консол ная нагрузка, которая уравновешивается вертикальными усилиями в зацеплениях реек 10 с шестернями 11. Усилия зацеп ления воспринимаются опорами вала 12, связанными с основанием 3 и не передаются на направляющие 4 вертикальных стоек. При изменении величины или вылета консольной нагрузки происходит перераспределение усилий в зацеплениях реек 10 с шестернями 11, а направляющие 4 остаются разгруженными от усилий, компенсирующих консольную нагрузку. 4 о б р е т Манипулятор, содержащий основание, вертикальные стойки, установленные в направляющих основания с возможностью вертикального перемещения, закрепленную, на стойках раздвижную механическую руку с захватом и привод вертикального перемещения стоек, отличающий- с я тем, что, с целью уменьшения мош ности привода, основание установлено с возможностью вращения вокруг вертикальной оси, механическая рука соединена со стойками щарнирно, а на стойках закреплены рейки, кинематически связанные с приводом. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство № 107213, М,кл, В 23 Q 7/04, 17.09.56.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1989 |
|
SU1821357A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| Устройство для перемещения материала | 1987 |
|
SU1447493A1 |
| НАБЕДРЕННЫЙ ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО "ШПАГАТОВ" (ВАРИАНТЫ) | 2000 |
|
RU2211718C2 |
| Манипулятор | 1980 |
|
SU963848A1 |
| Шаговый конвейер | 1982 |
|
SU1082712A1 |
| Устройство для открывания и закрывания крышек люков полувагонов | 1985 |
|
SU1310267A1 |
| Манипулятор | 1981 |
|
SU1002146A2 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Манипулятор | 1986 |
|
SU1454687A1 |