(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1995 |
|
RU2093346C1 |
| Манипулятор | 1980 |
|
SU918083A2 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ И РЕЗКИ ПРОВОЛОКИ, ПРУТКОВ, ЛЕНТЫ И ДРУГИХ ПОДОБНЫХ МАТЕРИАЛОВ | 2003 |
|
RU2253531C1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| Манипулятор | 1980 |
|
SU939365A1 |
| Манипулятор | 1989 |
|
SU1660953A1 |
1
Изобретение относится к технологическому оборудованию для механизации и автоматизации технологических операций и может найти применение в цехах механической обработки, штамповки, ковки на операциях подачи заготовок в рабочую зону станков.
Известен манипулятор, содержащий механическую руку, связанную с механизмом ее поворота 1.
Недостатки известного устройства - низкая надежность работы и сложность конструкции.
Цель изобретения - повышение надежности работы и упрощение конструкции.
Указанная цель достигается тем, что привод поворота выполнен в виде двух зацепленных зубчатых колес, с закрепленными на них пальцами, и диска с двумя пазами, кинематически связанного с механической рукой и с этими зубчатыми колесами, Кроме того, диск снабжен механизмом фиксации, имеющим упоры и подпружиненный толкатель, а также рычаг и ролик, закрепленные на диске, причем последние предназначены для взаимодействия соответственно с упорами и подпружиненным толкателем.
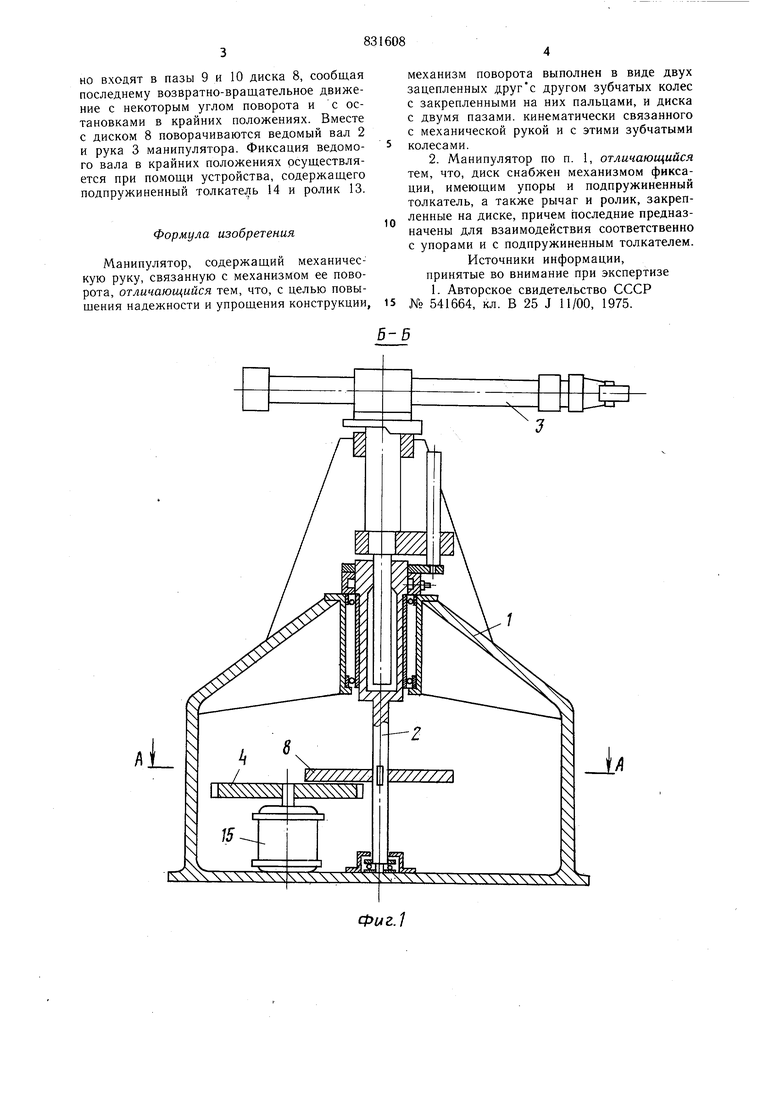
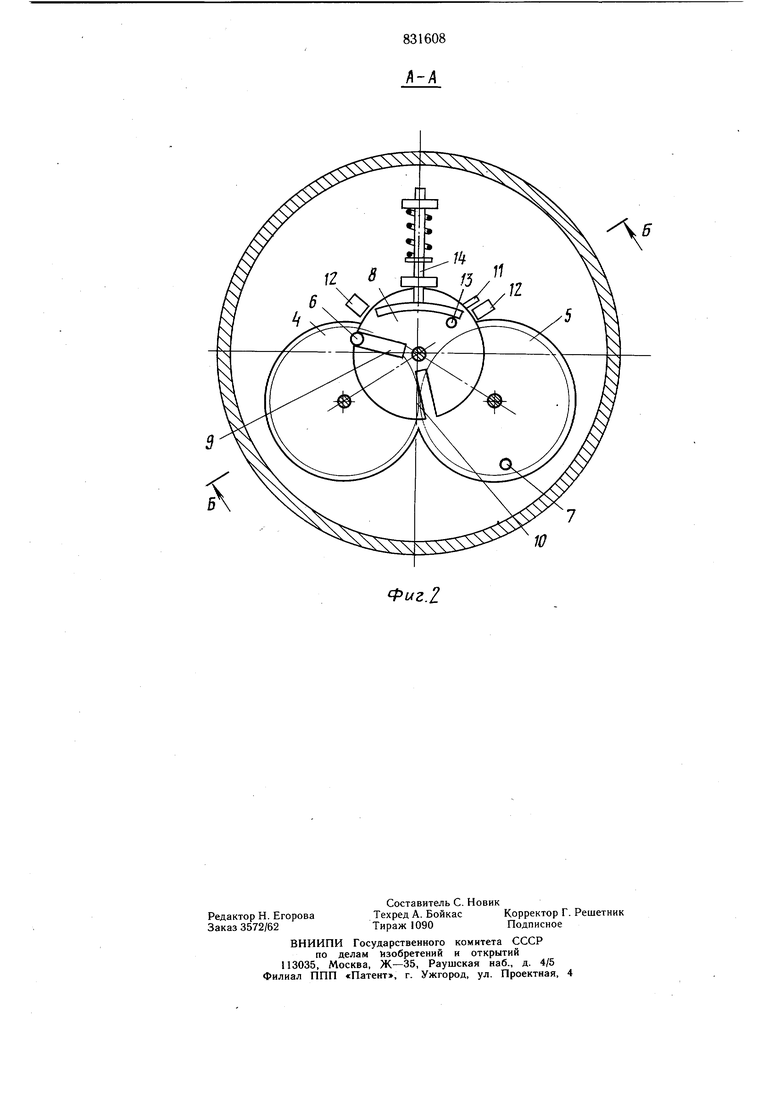
На фиг. 1 изображен манипулятор, общий вид (разрез Б-Б на фиг. 2); на фиг. 2 - разрез А-А на фиг. 1.
Манипулятор содержит корпус 1, в котором на подшипниках установлен ведомый вал 2 механизма поворота, на верхнем фланце ведомого вала установлена рука 3 манипулятора. В корпусе размещен механизм поворота, содержащий два зубчатых колеса 4 и 5 с установленными на них пальцами 6 и 7. На ведомом валу 2 закреплен диск 8, имеющий два радиальных паза 9 и 10. На двухпазовом диске 8 установлен рычаг 11, а в корпусе - два регулируемых упора 12. Ролик 13, установленный на двухпазовом диске 8, контактирует с криволинейной поверхностью подпружиненного толкателя 14. Одно из зубчатых колес закреплено на ведущем валу мотор-редуктора 15 с регулируемым числом оборотов.
Манипулятор работает следующим образом.
Мотор-редуктор 15 сообщает зубчатым колесам 4 и 5 вращательное движение с равными и противоположно направленными угловыми скоростями. Пальцы 6 и 7 поочередно входят в пазы 9 и 10 диска 8, сообщая последнему возвратно-вращательное движение с некоторым углом поворота и с остановками в крайних положениях. Вместе с диском 8 поворачиваются ведомый вал 2. и рука 3 манипулятора. Фиксация ведомого вала в крайних положениях осуществляется при помощи устройства, содержащего подпружиненный тoлкaтeJ ь 14 и ролик 6. Формула изобретения Манипулятор, содержащий механическую руку, связанную с механизмом ее поворота отличающийся тем, что, с целью повышения надежности и упрощения конструкции
Фиг.1 механизм поворота выполнен в виде двух зацепленных другс другом зубчатых колес с закрепленными на них пальцами, и диска с двумя пазами, кинематически связанного с механической рукой и с этими зубчатыми колесами. 2. Манипулятор по п. 1, отличающийся тем, что, диск снабжен механизмом фикcaJ ции, имеющим упоры и подпружиненный толкатель, а также рычаг и ролик, закрепленные на диске, причем последние предназначены для взаимодействия соответственно с упорами и с подпружиненным толкателем. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 541664, кл. В 25 J 11/00, 1975. 1/1
w
Фиг.2
