Изобретение относится к области машиностроения и другим областям, где необходимо обеспечить координатное перемещение рабочего органа.
Известна конструкция манипулятора (а.с. N 1618640, кл, B 25 11/00 с приоритетом от 23.05.88), состоящего из портала с горизонтальными направляющими, каретки, установленной в этих направляющих и имеющих вертикальные направляющие, стрелы, установленной в направляющих каретки, а также гибкого элемента, который соединен одним концом с противовесом и проходит через блоки, шарнирно установленные на каретке, второй конец гибкого элемента жестко связан с порталом.
Недостатком данной конструкции является возможность перемещения полезного груза только в одной (вертикальной плоскости).
Наиболее близким техническим решением является манипулятор (а.с. N 1530434, кл B 25 J 11/00 с приоритетом от 19.05.84), состоящий из портала, на котором с помощью направляющих последовательно расположены продольная, поперечная и вертикальная каретки, а также трособлочной системы с противовесами, блоки которой смонтированы на портале и каретках. Трособлочная система включает в себя два троса, один конец каждого из которых закреплен на портале, а другой на соответствующем противовесе. Один трос последовательно охватывает блоки поперечной и вертикальной кареток, а другой блоки поперечной каретки.
Недостатками данного манипулятора, принимаемого в качестве прототипа как наиболее близкого к заявляемому по технической сущности, являются:
1) повышенная сложность конструктивного исполнения, связанная с наличием в манипуляторе двух трособлочных систем механизма уравновешивания. Это влечет за собой дополнительное количество блоков и мест заделки тросов, а также повышенную суммарную протяженность тросов из-за параллельного их наличия на каретках;
2) повышенное усилие перемещения груза в горизонтальной плоскости, т.к. передача усилия с одной трособлочной системы на другую осуществляется не непосредственно тросами, а посредством поперечной каретки, которая своим плавающим положением может вносить рассогласование, уравновешивающее взаимодействие двух трособлочных систем.
Техническая задача, решаемая предлагаемым манипулятором, заключается в повышении надежности его функционирования. Это достигается уменьшением в уравновешивающем механизме элементов (блоков и мест заделки троса), которые могут привести к отказу манипулятора, а также уменьшением длины троса, что, в свою очередь, снижает его релаксацию при длительной эксплуатации и повышает его продольную жесткость. Кроме того, динамические характеристики манипулятора улучшены путем исключения из уравновешивающего механизма влияния поперечной каретки.
Для достижения технического результата в известной конструкции, содержащей последовательно расположенные в направляющих продольную, поперечную и вертикальные каретки, трособлочную систему с противовесом, часть блоков трособлочной системы закреплена на продольной и вертикальной каретках и по крайней мере один блок жестко закреплен вне кареток. Согласно изобретению трособлочная система выполнена с одним тросом, который охватывает жестко закрепленный блок и последовательно блоки продольной каретки, блок поперечной каретки с одной стороны, блок вертикальной каретки и блок поперечной каретки, блоки продольной каретки с другой стороны. Блоки трособлочной системы на каретках выполнены осесимметрично относительно плоскостей симметрии манипулятора. Один конец троса можно жестко закрепить, или противовесы, равные по массе, могут быть прикреплены к обоим концам троса, охватывающим жестко закрепленные блоки.
Выполнение трособлочной системы с одним тросом и симметричной дало возможность исключить места заделки тросов и некоторое количество блоков, что упростило конструкцию манипулятора и, кроме того, позволило передавать усилие оператора только через трос и блоки, минуя каретку манипулятора, что соответственно улучшило динамические характеристики манипулятора и снизило прилагаемое усилие. Последнее достигнуто, в частности, благодаря симметричности всей трособлочной системы, что максимально уравновешивает возникающие в манипуляторе усилия.
Сущность изобретения поясняется чертежом, на котором показан общий вид манипулятора, где 1 каретка продольного перемещения, 2 каретка поперечного перемещения, 3 каретка вертикального перемещения, 4 рабочий орган (захватное устройство), 5 полезный груз, 6 11, 15 и 16 блоки трособлочной системы, 12 направляющая продольной каретки, 13 противовес, 14 трос, 17 направляющая поперечной каретки.
Манипулятор содержит продольную каретку 1, обеспечивающую перемещение в направлении оси X, установленную на направляющей 12. Поперечная каретка 2 размещена в направляющих 17, выполненных на продольной каретке, и обеспечивает перемещение вдоль оси Y. Вертикальная каретка 3 закреплена на каретке поперечного перемещения 2, обеспечивает перемещение в вертикальном направлении по оси Z и выполнена в виде телескопической колонны. Блоки трособлочной системы 8, 9, 10, 11 установлены на продольной каретке 1, а блоки 6, 7,15, 16 установлены на поперечной каретке 2. Блок 15 установлен в центре торца вертикальной каретки 3. Трос 14 с закрепленным противовесом 13 охватывает последовательно блоки 10, 8, 6, 15, 7, 9, 11 и 16. Блоки 10, 8, 6 размещены по одну сторону плоскости симметрии манипулятора, а блоки 11, 9, 7 симметрично по другую. Возможен также вариант исполнения манипулятора, когда один конец троса жестко закреплен вместо блока 16 и, соответственно, здесь противовес 13 отсутствует.
При перемещении поперечной каретки 2 по направляющим 17 продольной каретки 1, а также продольной каретки 1 по направляющим 12 противовесы не меняют своего исходного положения, т.к. каретки обкатываются блоками 10, 8, 6, 15, 7, 9, 11 по тросу 14.
При перемещении каретки 3 вниз противовесы 13, связанные с ней тросом через блоки трособлочной системы, уравновешивают массу вертикальной каретки 3 с ее полезным грузом, равно перемещаясь вверх, при этом в варианте с двумя противовесами или с одним усилие оператора одинаково.
Использование предлагаемого устройства по сравнению с известными обеспечивает следующие преимущества:
1) уравновешивающее усилие постоянно и минимально при перемещении полезной нагрузки;
2) простота конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ РАДИОЭЛЕМЕНТОВ ИЗ СТОПЫ | 1998 |
|
RU2141748C1 |
| Манипулятор | 1987 |
|
SU1530434A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ ИЗ СТОПЫ | 2001 |
|
RU2209534C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИКИ УПРУГОЙ СИСТЕМЫ | 1990 |
|
RU2009461C1 |
| СПОСОБ ПОГЛОЩЕНИЯ ВОДОРОДА ИЗ ГАЗОВЫХ СМЕСЕЙ | 1995 |
|
RU2112737C1 |
| КЛАПАН ИЗБЫТОЧНОГО ДАВЛЕНИЯ | 1998 |
|
RU2151337C1 |
| УСТРОЙСТВО ДЛЯ ВЗРЫВНОЙ РЕЗКИ ТРУБ | 2001 |
|
RU2204689C2 |
Использование: для обеспечения координатного перемещениея рабочего органа. Манипулятор содержит последовательно расположенные в направляющих продольную, поперечную и вертикальную каретки, трособлочную систему с противовесом. Часть блоков закреплена на продольной, поперечной и вертикальной каретках. По крайней мере один из блоков жестко закреплен вне кареток. Трособлочная система содержит один трос, который охватывает жестко закрепленный блок и последовательно блоки продольной каретки, блок поперечной каретки с одной стороны, блок вертикальной каретки и блок поперечной каретки, блоки продольной каретки с другой стороны. 3 з.п. ф-лы. 1 ил.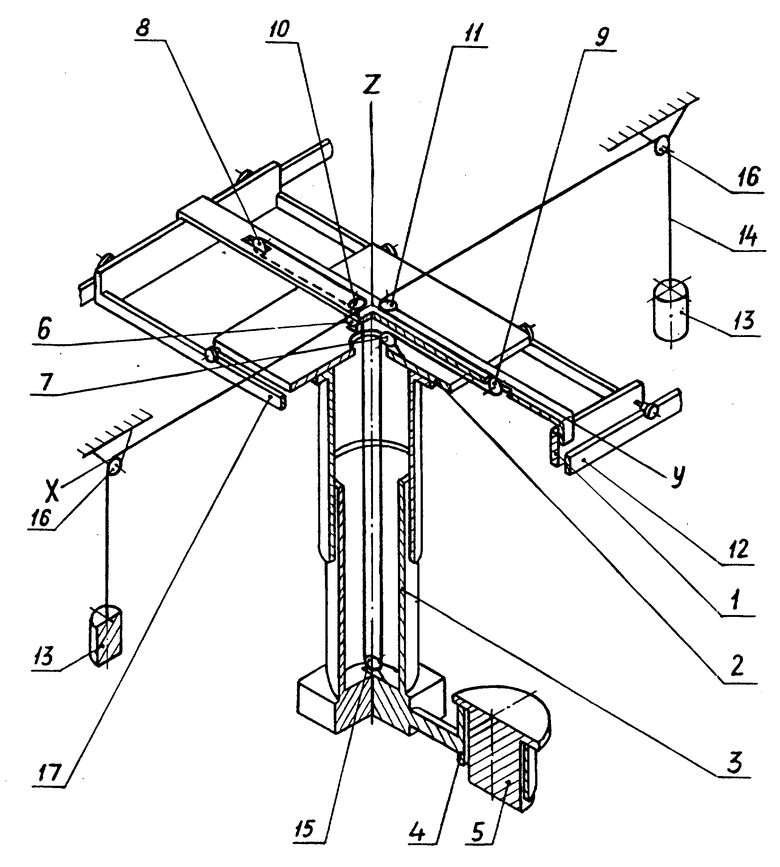
| Манипулятор | 1987 |
|
SU1530434A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
