Изобретение относится к области машиностроения и может быть использовано в конструкциях манипуляторов.
Цель изобретения - повышение надежности и снижение энергопотребления путем уравновешивания массы вертикальной каретки и сил тяжести противовесов, действующих на поперечную каретку.
На чертеже приведена схема манипулятора.
Манипулятор содержит портал 1, продольную каретку 2, смонтированную в направляющих портала 1, поперечную каретку 3, смонтированную в направляющих продольной каретки 2, вертикальную каретку 4, смонтированную в направляющих поперечной каретки 3, приводы 5-7, тросы 8 и 9, блоки 10 и 11, расположенные на портале 1, блоки 12-15, расположенные на продольной каретке 2, блоки 16-19 расположенные на поперечной каретке 3, блоки 20 и 21, расположенные на вертикальной каретке 4, противовесь 22 и 23, гайки 24 и 25.
Манипулятор работает следующим образом.
При перемещении поперечной каретки 3 вправо, а вертикальной каретки 4 вниз противовес 22, связанный с ней тросом через блоки 11, 13, 15, 18, 19, 2Г и 2, уравновешивает массу вертикальной каретки 4 с ее полезным грузом и воздействует на поперечную каретку 3. При этом противовес 23, компенсируюисий эту силу.
0
5
0
5
0
5
находится в это время в крайнем нижнем положении.
При перемещении вертикальной 4 и поперечной 3 кареток в противоположную сторону противовес 23, соединенный с поперечной кареткой 3 тросом 9 через блоки 10, 12, 14, 16 и 17, занимает крайнее верхнее, а противовес 22 - крайнее нижнее положения. При перемещении продольной каретки 2 вдоль портала 1 тросы 8 и 9, обкатываясь по блокам 12-21, не изменяют положения противовесов 22 и 23.
Формула изобретения
Манипулятор, содержащий портал, на котором с помощью направляющих последовательно расположены продольная, поперечная и вертикальная каретки, и трособлочную систему с противовесами, блоки которой смонтированы на портале и каретках, отличающийся тем, что, с целью повышения надежности и снижения энергопотребления путем уравновешивания массы вертикальной каретки и сил тяжести противовесов, действующих на поперечную каретку, тросо- блочная система выполнена из двух тросов, один конец каждого из которых закреплен на портале, а другой - на соответствующем противовесе, при этом один трос последовательно охватывает блоки поперечной и вертикальной кареток, а другой - блоки поперечной каретки.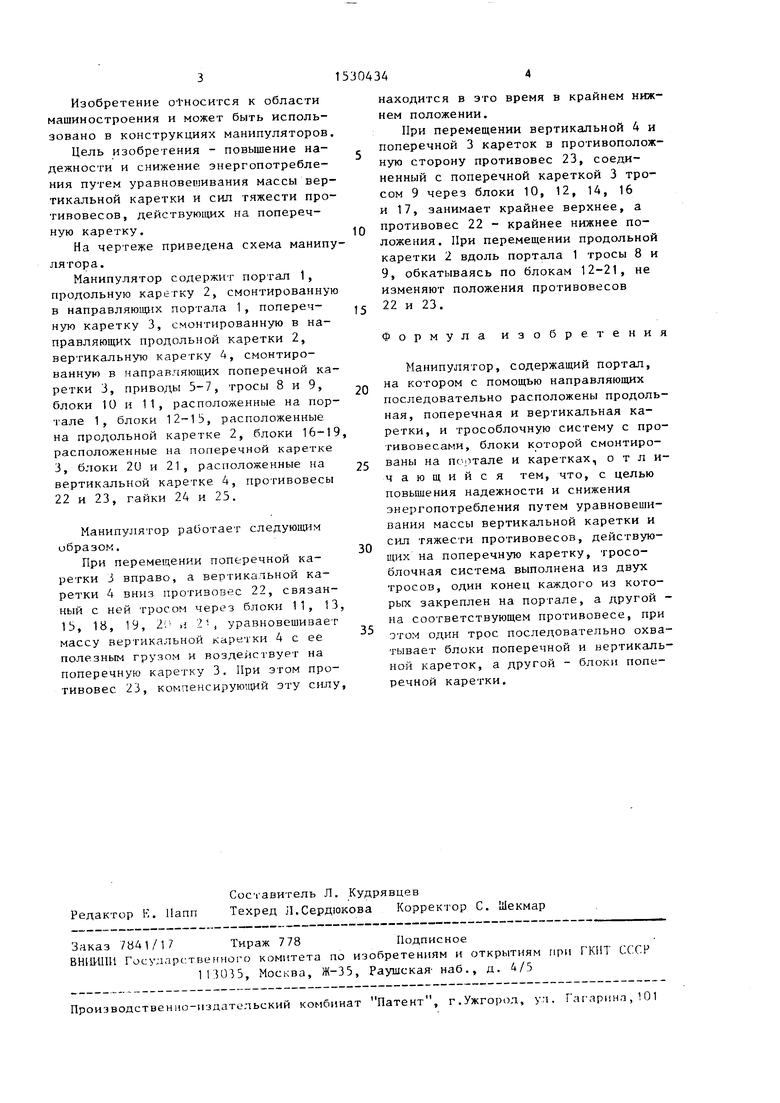
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1996 |
|
RU2093347C1 |
| Кантователь | 1981 |
|
SU963780A1 |
| Стреловой кран | 1990 |
|
SU1791356A1 |
| ПОРТАЛЬНЫЙ РОБОТ | 1988 |
|
RU2022770C1 |
| ПОРТАЛЬНЫЙ РОБОТ БЕЛЯЕВА Н.П. | 1992 |
|
RU2080243C1 |
| Установка для комплексной обработки металла | 1990 |
|
SU1740436A1 |
| САМОХОДНЫЙ ПОРТАЛ | 1970 |
|
SU268569A1 |
| ПОДЪЕМНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1997 |
|
RU2112736C1 |
| Портальный манипулятор | 2024 |
|
RU2830680C1 |
| Струнный подъемник | 1978 |
|
SU753767A1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов. Целью изобретения является повышение надежности манипулятора и снижение его энергопотребления путем уравновешивания массы вертикальной каретки и сил тяжести противовесов, действующих на поперечную каретку. При перемещении поперечной каретки 3 вправо, а вертикальной каретки 4 вниз противовес 22 уравновешивает массу вертикальной каретки 4 с ее полезным грузом и воздействует на поперечную каретку 3. При этом противовес 23 компенсирует его воздействие на поперечную каретку 3 и находится в крайнем нижнем положении. При перемещении кареток 2 - 4 в противоположную сторону противовес 23 занимает крайнее верхнее, а противовес 22 - крайнее нижнее положение. При перемещении продольной каретки 2 вдоль портала 1 тросы 8 и 9 не изменяют положения противовесов 22 и 23. 1 ил.
| Манипулятор портального типа | 1985 |
|
SU1310199A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
