Изобретение относится к крановым предохранительным устройствам, которые обладают возможностью формировать дисплейные изображения кранов и предоставлять оператору информацию о рабочих настройках крана и рекомендации по безопасности в соответствии с избранным режимом дисплейного изображения.
Известно крановое предохранительное устройство, содержащее датчики, размещенные на крановом механизме и предназначенные для выдачи сигналов о рабочем состоянии кранового механизма, характеризующих длину стрелы, угол стрелы и угол поворота стрелы, клавиатуру для задания операторам команд, дисплей, включающий в себя запоминающий блок хранения графической информации для воспроизведения условного изображения кранового механизма и двумерный экран для воспроизведения графического изображения в соответствии с графической информацией, помещенной в запоминающий блок, и процессор, связанный с упомянутыми датчиками, клавиатурой и дисплеем.
В указанном известном устройстве крановая стрела и препятствие схематически представляются на экране, чтобы можно было обнаруживать возможный контакт схематических изображений на экране. В этом случае, однако, надо точно задавать координаты препятствия на экране, что предполагает весьма не простую исходную настройку рабочего диапазона.
Кроме того, не предусмотрено выполнение функции, обеспечивающей правильную и безопасную работу на участках, которые оператор не может обозревать.
Другой проблемой, относящейся к этому известному устройству, является то, что рассчитывается только степень безопасности фактической нагрузки относительно номинальной нагрузки, т. е. степень безопасности фактической операции. Как результат, оператор не способен ощутить в достаточной мере опасность возможных следующих этапов операции.
Не предусмотрено выполнение функции избирательного представления на дисплее изображения, которое можно было бы использовать для управления работой крана применительно к конкретному содержанию операции.
Техническим результатом, на достижение которого направлено изобретение, является повышение безопасности при работе крана.
Технический результат достигается тем, что в крановом предохранительном устройстве, содержащем датчики, размещенные на крановом механизме и предназначенные для выдачи сигналов о рабочем состоянии кранового механизма, характеризующих длину стрелы, угол стрелы и угол поворота стрелы, клавиатуру для задания оператором команд, дисплей, включающий в себя запоминающий блок хранения графической информации для воспроизведения условного изображения кранового механизма и двумерный экран для воспроизведения графического изображения в соответствии с графической информацией, помещенной в запоминающий блок, и процессор, связанный с упомянутыми датчиком, клавиатурой и дисплеем, процессор выполнен с возможностью обновления в ответ на поступающие через определенные интервалы сигналы датчиков помещенной в запоминающий блок дисплея графической информации условного изображения кранового механизма, формирования на экране графического изображения кранового механизма в процессе его работы, определения по командам, поступающим с клавиатуры, соответствия взаимного положения опорной точки экрана и определенной заранее точки условного изображения кранового механизма, и записи в запоминающий блок кранового механизма информации о рабочей зоне кранового механизма, и воспроизведения ее неподвижного изображения на экране с одновременным изображением кранового механизма в динамике.
Процессор выполнен с возможностью формирования рабочей зоны стрелы крана относительно концевой точки последней.
На фиг. 1 дана блок-схема, представляющая фундаментальную структуру устройства, соответствующего настоящему изобретению; на фиг. 2 пример кривой номинальных нагрузок, хранящейся в устройстве; на фиг. 3 блок-схема, иллюстрирующая конкретную структуру устройства, соответствующего настоящему изобретению; на фиг. 4 дисплейное изображение на экране во время действия режима настройки рабочего состояния с использованием устройства, соответствующего настоящему изобретению; на фиг. 5 то же, во время действия режима автоматического слежения за безопасностью; на фиг. 6 графические обозначения причин автоматического останова, появляющихся на экране устройства, соответствующего настоящему изобретению; на фиг. 7 дисплейное изображение во время действия режима настройки рабочего диапазона с применением устройства, соответствующего настоящему изобретению; на фиг. 8 - то же, во время действия целевого режима; на фиг. 9 то же, во время действия режима "предельная нагрузка угол поворота"; на фиг. 10 то же, во время действия режима "изображение рабочей характеристики"; на фиг. 11 часть таблицы "Максимальные номинальные нагрузки крана"; на фиг. 12 дисплейное изображение на экране во время действия режима "изображение таблицы рабочих характеристик" с применением устройства, соответствующего настоящему изобретению; на фиг. 13 основная блок-схема программы, иллюстрирующей рабочую последовательность основного устройства; на фиг. 14 блок-схема, представляющая жесткое прерывание со стороны основного устройства; на фиг. 15 блок-схема, представляющая мягкое прерывание со стороны как основного устройства, так и дисплейного устройства; на фиг. 16 основная блок-схема, показывающая операционную последовательность дисплейного устройства; на фиг. 17 блок-схема, иллюстрирующая обработку соответствующих дисплейных разжимов в основной блок-схеме дисплейным устройством; на фиг. 18 блок-схема, иллюстрирующая жесткое прерывание со стороны дисплейного устройства; на фиг. 19 временная диаграмма сигналов, относящихся к таймерному прерыванию.
Основная структура кранового предохранительного устройства представлена на фиг. 1. Крановое предохранительное устройство состоит из основного блока А и дисплейного блока В. Во время работы устройства происходит обмен данными между центральными процессорным устройством основного блока и центральным процессорным устройством дисплейного блока.
После включения питания прежде всего надо настроить рабочее состояние крана (степень выступления опор, вылет консоли и т.п.). Эта настройка производится с помощью дисплейного блока. Оператор выбирает из множества дисплейных режимов режим настройки рабочего состояния для представления на экране изображения, подобного проиллюстрированному фиг. 4, на дисплейном В" экране и нажимает определенные клавиши из набора установочных клавиш В', одновременно наблюдая за изображением на экране В". Дисплейный блок имеет память, которая хранит графические данные, необходимые для создания изображения, представленного на фиг. 4. В соответствии с управляющей дисплеем программой, хранящейся в памяти 1B (только считывания), центральное процессорное устройство 2B избирательно считывает дисплейное изображение, представленное на фиг. 3, из этой памяти и записывает его в видеопамять произвольного доступа В"', а затем отображает его на дисплейном В" экране в соответствии с данными, считанными из видеопамяти В"'. Центральное процессорное устройство дисплейного блока извлекает данные, подобные заданному положению опор, ранее введенные оператором посредством клавиш, модифицирует дисплейное изображение так, чтобы оно отвечало установочным данным, и пересылает эти установочные данные в качестве данных DВ на основной блок А. После завершения режима настройки рабочего состояния дисплейный блок входит в режим автоматического слежения за безопасностью крана и представляет дисплейное изображение, проиллюстрированное на фиг. 5, на дисплейном В" экране. Графические данные для дисплейного изображения, подобного проиллюстрированному на фиг. 5, предварительно занесены в память, поэтому центральное процессорное устройство лишь производит избирательное считывание и отображение этих графических данных.
Помимо установочных данных DВ о рабочем состоянии крана, поступающих от дисплейного блока В, основной блок А получает от группы датчиков А' данные о рабочих параметрах (подобные длине стрелы l, углу наклона стрелы θ, углу поворота стрелы v), представляющие рабочее состояние кранового механизма, которое изменяет во время работы крана. Эти рабочие параметры поступают непосредственно или после обработки на центральном процессорном устройстве на дисплейный блок В в качестве данных А. Дисплейный блок В модифицирует с течением времени дисплейное изображение на дисплейном экране В" в соответствии с данными А, тем самым отображая текущее рабочее состояние крана.
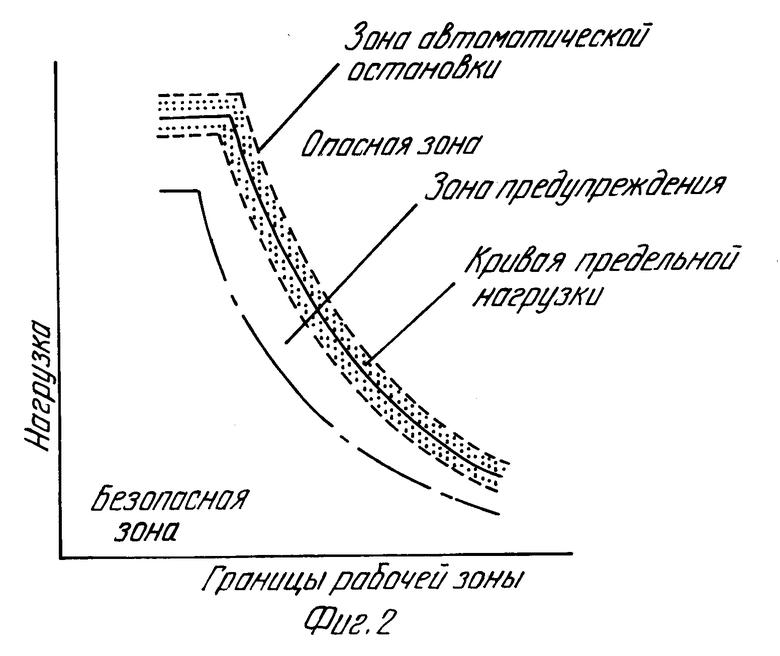
Основной блок А хранит разнообразные данные, касающиеся спецификации каждого отдельно крана. К таким данным относятся максимальные номинальные нагрузки при разнообразных рабочих состояниях крана. Например, кривая максимальной номинальной нагрузки, показанная на фиг. 2, используется для установки исходных значений рабочего состояния, подобных промежуточному выступанию опор (5 м в боковом направлении) без консоли и при длине стрелы 8, равной 9 м. Подобная кривая максимальной номинальной нагрузки рассчитывается для каждого сочетания установок рабочего состояния и каждого значения длины стрелы с учетом спецификации конкретного крана. Большая часть этих данных хранится в постоянной РОМ памяти главного блока А. В соответствии с исходными значениями рабочего состояния крана, именуемыми данными DВ и поступающими от дисплейного блока В, и изменяющимися во времени значениями рабочих параметров крана, поступающих от группы датчиков А', главный блок А выполняет доступ в постоянную память 1А, чтобы получить данные о максимальной номинальной нагрузке для текущего рабочего состояния крана, или сравнивает максимальное значение нагрузки, полученное в результате обработки данных, с фактической нагрузкой и, если текущее рабочее состояние крана оказывается в опасной зоне, подает предупреждающий сигнал и/или посылает управляющий сигнал на крановый механизм А" для автоматического останова работы крана.
В памяти дисплейного устройства хранится некоторое множество графических данных для дисплейных изображений, соответствующих множеству дисплейных режимов. Дисплейное изображение, подобное представленным на фиг. 7-11, выбирается в соответствии с режимом работы дисплея, который задан нажимом на клавишу. Помимо дисплейного режима автоматического слежения за безопасностью крана, проиллюстрированного фиг. 6, известного и принятого в этой технической области, оператор может пользоваться другими дисплейными режимами для установки значений операций крана и слежения за эффективной работой крана.
Основной блок А и дисплейный блок В каждый в отдельности имеют процессор 2A и 2B (центральное процессорное устройство), и каждый из них самостоятельно исполняет собственную программу. Обмен командами и данными между основным блоком А и дисплейным блоком В допускает прерывания.
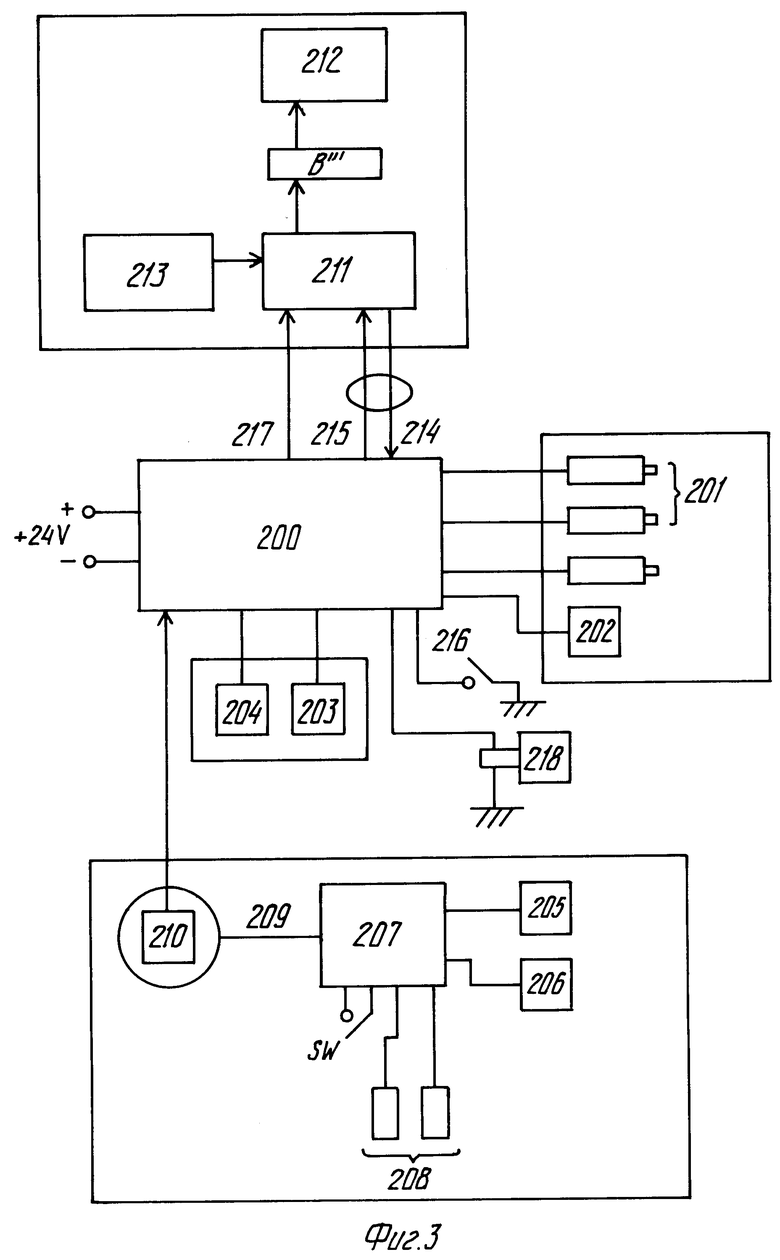
Как показано на фиг. 3, центральное процессорное устройство 200 основного блока принимает данные о фактической нагрузке от датчика напряжения 201 и другие данные о рабочих параметрах крана от датчика угла поворота 202, датчика длины стрелы 203, датчика угла наклона стрелы 204, датчика V (вертикального) угла вершины стрелы 205, датчика V (вертикального) угла консоли 206, а также датчика напряжения 208, соответственно размещенных в разнообразных точках крана. Данные датчиков 205 и 206, которые размещены в вершине стрелы, поступают на вершинный контакт 207 на свободном конце стрелы по волоконно-оптическому кабелю 209, подвергаются фотоэлектрическому преобразованию внутри ленточной катушки и отправляются на центральное процессорное устройство 200 основного блока. Центральное процессорное устройство 211 дисплейного блока получает питание от центрального процессорного устройства 200 основного блока по линии 217. Обмен данными и командами между центральным процессорным устройством 211 дисплейного блока и центральным процессорным устройством 200 основного блока осуществляется по двум направленным последовательным линиям 214 и 215. Дисплей 212 является жидкокристаллическим дисплеем (LCP) матричного типа с динамическим возбуждением, дисплей LCP предпочтительнее электронно-лучевой трубки, светодиодного дисплея, плазменного дисплея и т.п. поскольку краны обычно работают на открытых площадках и поскольку может создавать четкое дисплейное изображение даже при ярком солнечном свете. В ночное время дисплей LCP 212 создает обратную подсветку. Группа настроечных клавиш содержит клавиши, число которых соответствует числу подлежащих вводу параметров. Управляющие крановым механизмом сигналы подаются на поршень 218, магнитный клапан и т.п.
Режим работы дисплейного блока
1. Режим установки рабочего состояния
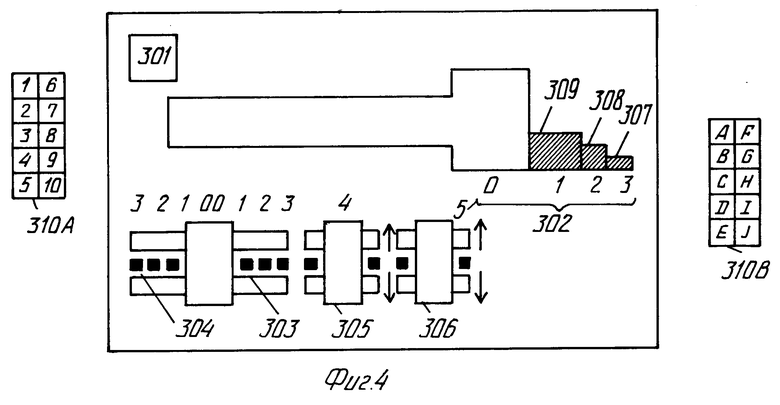
Как видно на фиг. 4, после включения питания центральное процессорное устройство дисплейного устройства автоматически входит в режим установки рабочего состояния и выдает на экран изображение, проиллюстрированное на фиг. 4. Этот режим условно обозначается в позиции 301. Числа в позиции 302 отображают состояние стрелы, и в начальный момент они мигают. После выбора оператором необходимых чисел они перестают мигать и светятся постоянно. Во-первых, чтобы задать нужное рабочее состояние стрелы, надо нажать один из десяти переключателей (клавиш) на клавишной панели 310A. Цифра "0" соответствует случаю, когда используется лишь основная стрела (укосина) без консоли и гульса; цифра "1" задает использование одной ступени консоли, цифра "3" задает использование двух ступеней консоли. После завершения задания рабочего состояния стрелы станут мигать цифры, задающие состояние правосторонней опоры 303. Цифра "3" соответствует максимальному выдвижению; цифра "2" промежуточному выдвижению, цифра "1" небольшому выдвижению, цифра "0" минимальному выдвижению, цифра "4" означает отсутствие опоры и цифра 5 установку во время подъема предмета (груза). Как и при задании рабочего состояния стрелы, оператор задает нужную цифру нажимом на одну из клавиш на клавиатуре 310A.
После задания положения правой опоры надо задать состояние левой опоры 304.
Центральное процессорное устройство дисплейного блока делает выбранные цифры светящимися ровным светом и посылает выбранные установочные данные о состояниях стрелы и опор в центральное процессорное устройство основного блока.
2. Режим автоматического слежения за безопасностью крана
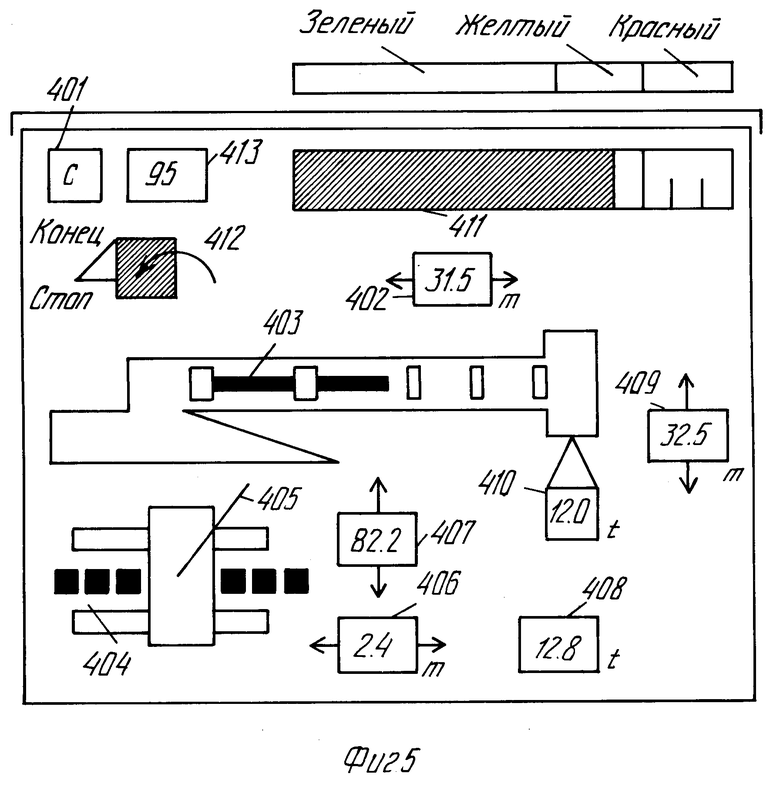
После завершения ввода данных в режиме установки рабочего состояния центральное процессорное устройство дисплейного блока автоматически входит в режим автоматического слежения за безопасностью крана, представив на дисплее изображение, показанное на фиг. 5. В соответствии с информацией, поступившей от центрального процессорного устройства основного блока, центральное процессорное устройство дисплейного блока отображает на экране текущее рабочее состояние крана, т.е. положение опор 404, угол поворота 405, рабочий радиус 406, угол наклона стрелы 407, поднимаемый груз 410, высоту подъема 409 и длину стрелы 402. Длина стрелы схематично представляется полосой 403, длина которой зависит от фактической длины стрелы.
Безопасный предел текущего состояния изображается в виде полоскового графа 411. Числовое представление безопасного предела указывается в позиции 413. Предельная (максимальная) нагрузка для текущего рабочего состояния крана указывается в позиции 408. Когда текущее рабочее состояние крана приближается к предельной зоне (т.е. когда полоска 411 доходит до желтой зоны), подается предупредительный сигнал. Когда состояние становится предельным, кран автоматически останавливается. Центральное процессорное устройство основного блока следит за фактическим состоянием крана, используя данные от разнообразных датчиков, обращается к памяти, для считывания максимальной предельной нагрузки для конкретного рабочего состояния и проверяет, больше или равна считанная максимальная предельная нагрузка в сравнении с фактической нагрузкой. Если фактическая нагрузка становится равной максимальной предельной нагрузке для текущего рабочего состояния крана, то центральное процессорное устройство основного блока подает сигнал, блокирующий рабочий механизм крана. Во время действия режима автоматического слежения за безопасностью крана центральное процессорное устройство дисплейного блока представляет на экран для обозрения оператором рабочее состояние крана. Состояние крана становится предельным, когда ему задана максимальная предельная нагрузка или когда достигнут предел рабочего диапазона, заданный оператором (о чем будет сказано ниже со ссылками на фиг. 7). В последнем случае также подается предупредительный сигнал, и кран автоматически останавливается.
Одним из отличительных признаков настоящего варианта осуществления является представление на экране причины автоматического останова в позиции 412. Если кран остановится автоматически во время дисплейного режима автоматического слежения за безопасностью крана, то оператору трудно выяснить сразу же причину автоматического останова. Причину автоматического останова особенно трудно обнаружить при опрокидывании крана или поломки в результате перегрузки при эксплуатации, а также в том случае, если в режиме работы под автоматическим слежением за безопасностью крана выполняется установка рабочего диапазона или зоны крана (о которой будет сказано ниже со ссылками на фиг. 7). Если трос продолжает стравливаться после наперед заданной длины, то во время работы крана осуществляется намотка троса. В таком случае также выполняется автоматический останов. В предпочтительном варианте осуществления в режиме автоматического слежения за безопасностью крана причина автоматического останова представляется символом на экране в позиции 412.
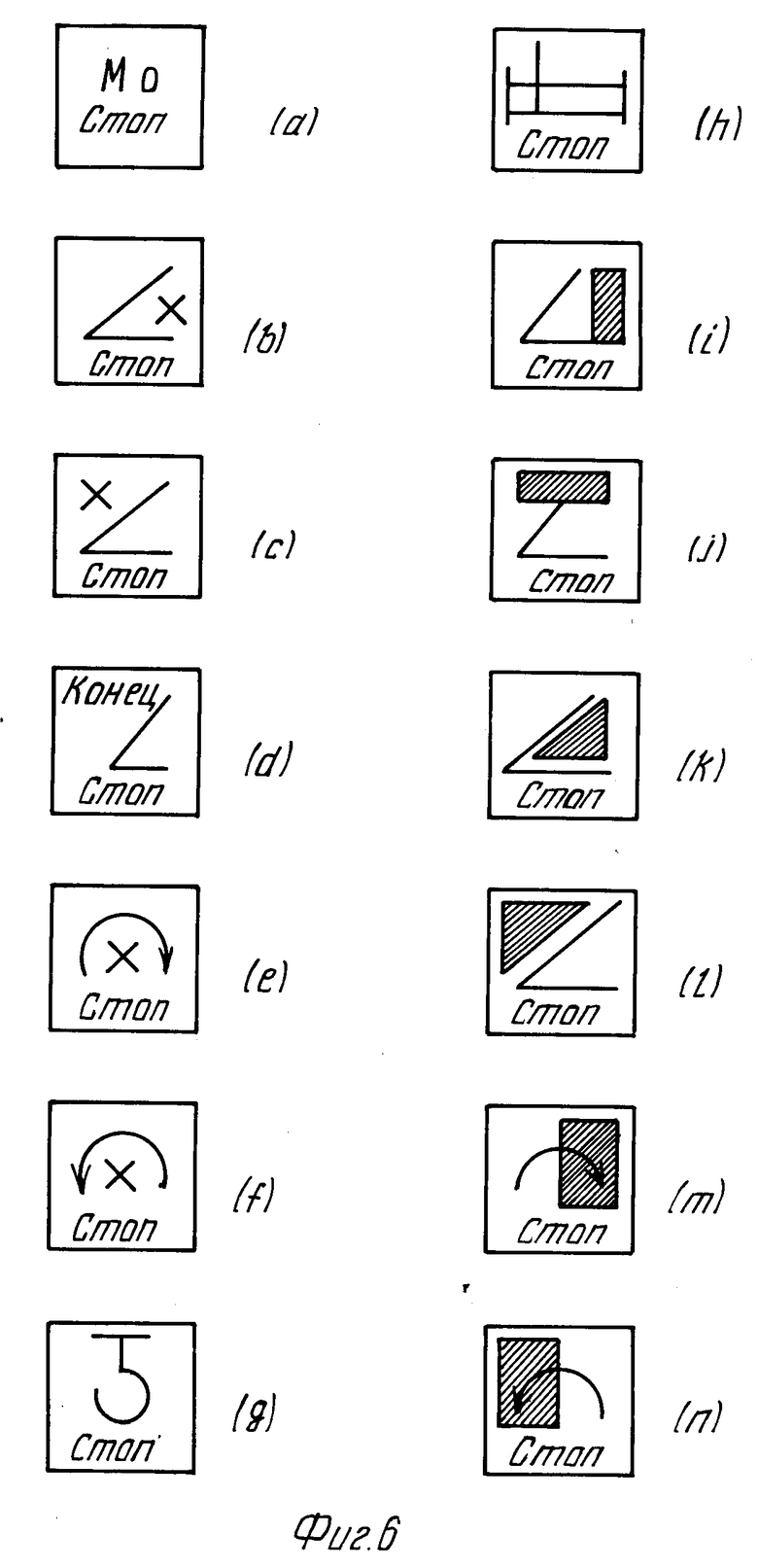
Символические обозначения причин автоматического останова показаны на фиг. 6 под позициями от (а) до (n), значения которых разъяснены ниже. Если автоматический останов произошел по нескольким причинам, то на экран выдаются номера обозначений.
Символическое обозначение Причина автоматического останова
(a) автоматический останов по моменту (предельной нагрузке)
(b) автоматический останов из-за уменьшения угла
(c) автоматический останов из-за превышения угла
(d) автоматический останов из-за минимальности отклонения от вертикальной стрелы
(e) автоматический останов из-за правого поворота
(f) автоматический поворот из-за левого поворота
(g) автоматический останов из-за скручивания
(h) автоматический останов из-за расцепления
(i) автоматический останов из-за достижения предельного радиуса
(j) автоматический останов из-за достижения предельной высоты подъема
(k) автоматический останов из-за ограничения меньшего угла
(l) автоматический останов из-за ограничения большего угла
(m) автоматический останов при достижении предела правого поворота
(n) автоматический останов при достижении предела левого поворота
Причина автоматического останова из названных выше появляется на экране для соблюдения определенных условий. Например, причина автоматического останова по моменту появится на экране, если фактическая нагрузка равна или превышает предельную нагрузку и рычажное действие опасно. Если фактическая нагрузка приблизилась к предельной нагрузке и оператор пытается опустить стрелу или увеличить ее вылет или заставит лебедку наматывать трос, то эти рычажные операции являются опасными. Центральное процессорное устройство основного блока дает блокирующий сигнал в ответ на эти опасные рычажные операции, а центральное процессорное устройство дисплейного блока представляет символическое обозначение "(а)". После автоматического останова оператор по символическому обозначению причины автоматического останова "(а)" узнает, что стрелу нельзя опускать или удлинять и что кран можно избавить от опасности другими действиями, подобными подъему стрелы. Если кран опускает стрелу и фактическая нагрузка превышает предельную нагрузку, кран входит в режим автоматического останова, а на экране появляется символическое обозначение причины автоматического останова, которой в данном случае является превышение момента. При переводе рабочего рычага крана обратно к нейтральному положению автоматическая блокировка снимается и с экрана исчезает причина останова. При этом условии, если рабочий рычаг крана повернуть в сторону увеличения вылета стрелы, вновь произойдет останов и на экране появится символ причины автоматического останова. Если рабочий рычаг крана повернуть не в сторону удлинения стрелы, а в сторону придания стреле вертикальности, укорочения стрелы или наматывания троса, то автоматический останов и изображения причин не претерпят изменения.
Направление опасной работы крана для каждой причины автоматического останова различно. Центральное процессорное устройство основного блока хранит данные, касающиеся направления блокировки рабочего рычага для каждой причины автоматического останова. Например, если автоматический останов произошел по причине достижения предельного большего угла, центральное процессорное устройство основного блока подает на крановый механизм сигнал, который блокирует рабочий рычаг в направлении подъема стрелы и позволяет его перемещение в направлении опускания стрелы.
В режиме автоматического слежения за безопасностью крана при одновременном возникновении нескольких причин для автоматического останова оператор узнает их визуально, что делает эксплуатацию крана весьма простым делом.
3. Режим "предел рабочего диапазона"
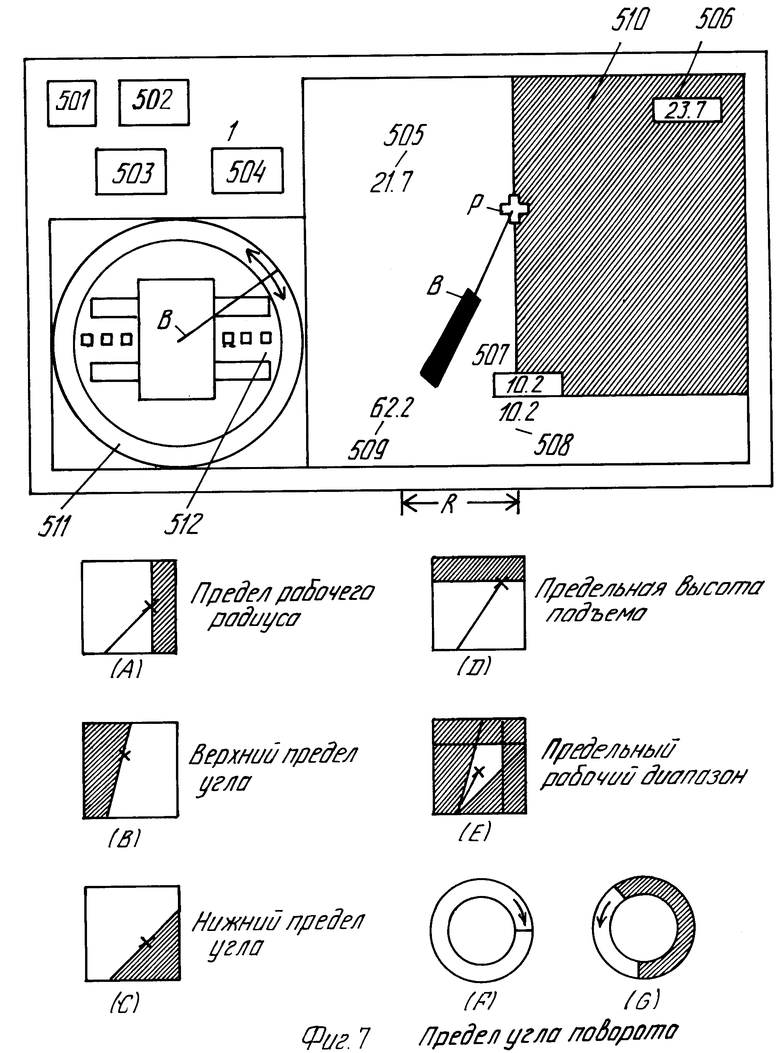
В дополнение к заданию рабочего диапазона крана, учитывающего возможность опрокидывания крана и его повреждения, устанавливается диапазон перемещения стрелы, который исключает возможность столкновения стрелы с окружающими зданиями и т.п. Желательно, чтобы подавался предупредительный сигнал или чтобы кран автоматически останавливался, если стрела движется в направлении выхода из заданного диапазона перемещения. После нажима на клавишу А клавиатуры 310B центральное процессорное устройство дисплейного блока водит в режим изображения "предела рабочего диапазона" и выдает на экран изображение, представленное на фиг. 7. Дисплейный режим обозначается в позиции 501. В правой части экрана в позиции В схематично изображена стрела, а в позиции Г ее свободный конец, помеченный "крестом". Схематическое изображение стрелы В воспроизводит фактическое перемещение стрелы, что является результатом работы центрального процессорного устройства дисплейного блока, обрабатывающего рабочие параметры, поступающие от центрального процессорного устройства основного блока. При задании предела рабочего радиуса стрелы оператор перемещает стрелу в предельную точку (схематическое изображение стрелы В также перемещается в предельную точку). После нажима на клавишу В на клавиатуре 310B нерабочий диапазон определяется в заштрихованной площади справа от свободного конца стрелы Р. Значение рабочего радиуса R в виде предельного рабочего радиуса появляется в рамке, обозначенной позицией 507. Можно в дополнение к предельному радиусу (А) задать верхний предел угла (В), нижний предел угла (С) и предельную высоту подъема (b). Отличительной особенностью такой установки является то, что фактически перемещается стрела к предельной точке и нажим на клавишу задает нерабочий диапазон вместо того, чтобы производить расчет и устанавливать численное значение предела без перемещения стрелы в предельную точку. Преимущество этого способа задания состоит в том, что рабочий диапазон можно определить фактическим перемещением стрелы в полевых условиях. Итоговый предельный рабочий диапазон, учитывающий все пределы от (А) до (10), подобные предельному радиусу и т.д. обозначен (Е). Стрела способна перемещаться внутри незаштрихованной площади. Другие численные значения, относящиеся к фактической стреле, также представлены на экране и включают угол наклона стрелы 509, фактический радиус 508, длину стрелы 506 и высоту подъема 505.
В левой части экрана показан предельный диапазон угла поворота стрелы. Схематическое изображение стрелы В воспроизводит перемещение реальной стрелы. Стрелу перемещают в точку предельного угла поворота, и для задания передела диапазона поворота стрелы нажимают на клавишу на клавиатуре. Для угла поворота стрелы можно задать один предел, как проиллюстрировано (F), или два предела, как проиллюстрировано (G). Ранее заданное состояние опор 512 также изображается в площади, отображающей угол поворота стрелы.
Для справочной цели на экране высвечиваются поднимаемый груз 503 и максимальная нагрузка 504.
Значения параметров, заданные во время режима изображения "предела рабочего диапазона", пересылаются в форме числовых данных из центрального процессорного устройства дисплейного блока в центральное процессорное устройство основного блока. Предполагая, что задающая предельный радиус клавиша нажата при длине стрелы li и угле наклона стрелы qi, имеем для вычисления численного значения предельного радиуса уравнение:
RL= lisinθi.
Центральное процессорное устройство дисплейного блока представляет заштрихованную площадь в правой части экрана R. Если стрела перемещается в направлении выхода из предельного заданного рабочего диапазона, центральное процессорное устройство основного блока опознает это и подает предупредительный сигнал или производит автоматический останов. Оператор может визуально следить за перемещением стрелы внутри допустимого рабочего диапазона, который помечен позицией (Е), с учетом нерабочего диапазона. Существенное преимущество состоит в том, что оператор может предвидеть следующий этап перемещения стрелы.
4. Режим изображения цели
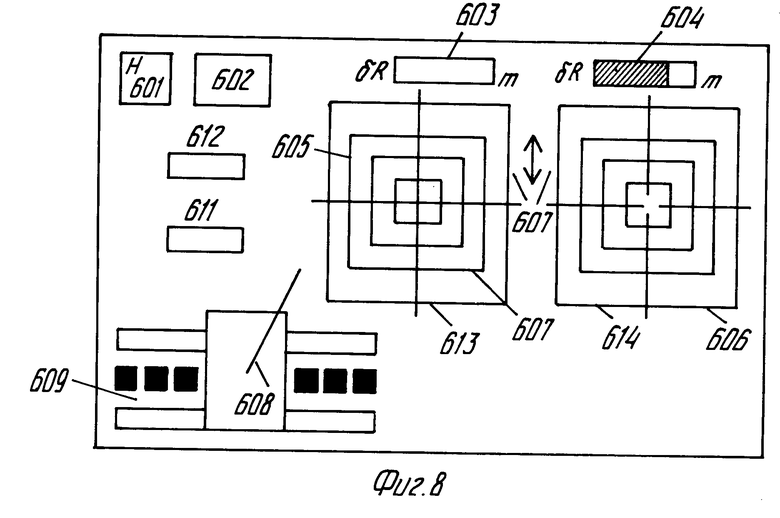
После активизации клавиши выбора режима на панели 310В центральное процессорное устройство дисплейного блока входит в режим изображения цели, причем на экране появляется изображение, показанное на фиг. 8. Этим режимом изображения цели пользуются в том случае, когда оператор не может видеть поднимаемый груз, находясь внутри кабины крана. Целевые указательные метки 605 и 606, начерченные сплошными линиями на фиг. 8, применяются для задания целевых точек. Сторона наименьшего квадрата целевой указательной метки соответствует фактической длине 15 см, сторона следующего вложенного квадрата соответствует длине 30 см, сторона наружного квадрата соответствует фактической длине 60 см. Во-первых, кран заставляют переместить фактический груз в расположение цели, которая устанавливается как первая цель нажимом на клавишу на клавиатуре 310В. Первой целью является начало координатной системы экрана поднимаемого груза. Позиция 607 изображается на экране на определенном расстоянии от начала координат. После задания первой цели оператор может по экрану определять положение поднимаемого груза относительно позиции цели без наблюдения за фактически поднимаемым грузом. Кран часто используют для подъема груза в одной точке и перемещения его в другую точку выполнения поворота. В таком случае целевую указательную метку 605 устанавливают в первую точку и целевую указательную метку 606 устанавливают во вторую точку. Указательные метки 605 и 606 имеют независимые координатные системы, поэтому расстояние между целевыми указательными метками 605 и 606 не соответствует фактическому расстоянию между ними. Рамки, вычерченные пунктирными линиями, представляют собой эффективные дисплейные площади координатных систем первой и второй точек, причем сторона рамки соответствует фактической длине, например 100 см. Положение поднятого груза внутри этой эффективной площади обозначается меткой  . Даже если поднятый груз перемещается вне этой площади, метка
. Даже если поднятый груз перемещается вне этой площади, метка  , подобная изображенной под позицией 607', на экране перемещается по пунктирной линии, в результате чего оператор может опознавать направление перемещения груза. Наблюдая за положением метки
, подобная изображенной под позицией 607', на экране перемещается по пунктирной линии, в результате чего оператор может опознавать направление перемещения груза. Наблюдая за положением метки  на экране относительно целевой указательной метки, оператор может выполнять операцию перемещения поднятого груза между первой и второй точками, фактически их не видя.
на экране относительно целевой указательной метки, оператор может выполнять операцию перемещения поднятого груза между первой и второй точками, фактически их не видя.
Численные значения расстояний поднятого груза от первой и второй точек представлены на экране в позициях 603 и 604. Для справочной цели положение опор 609 и угол поворота стрелы 608 обозначены в нижней левой части поверхности экрана. Так же для справочной цели показаны значения поднимаемого груза 612 и максимальной нагрузки 611. В позиции 601 проставляется символ дисплейного режима, в позиции 602 показано численное значение степени безопасности работы крана во время этого дисплейного режима.
Фактическое положение поднятого груза вычисляется центральным процессорным устройством основного блока по позиционным данным, полученным от разнообразных датчиков, и конструктивным параметрам крана, и данные о позиции поднятого груза передаются на центральное процессорное устройство дисплейного блока. После нажима на клавишу на дисплейном блоке для определения определенной позиции как начала координат целевой указательной метки 605 центральное процессорное устройство дисплейного блока использует данные о позиции поднятого груза в этот момент как начала координат указательной метки 605. Центральное процессорное устройство дисплейного блока показывает позицию 607 поднятого груза на экране относительно целевой указательной метки в соответствии с разностью между данными о текущем положении поднятого груза и данными о позиции поднятого груза в момент задания (целевой метки). Если поднятый груз перемещается вне наружного квадрата индексной метки, центральное процессорное устройство дисплейного блока показывает метку  вдоль пунктирной линии 613, указывая направление перемещения поднятого груза. Если затем поднятый груз оказывается ближе к первой или второй точке (т. е. его образ оказывается внутри наружного квадрата указательной метки), то вновь появляется изображение позиции.
вдоль пунктирной линии 613, указывая направление перемещения поднятого груза. Если затем поднятый груз оказывается ближе к первой или второй точке (т. е. его образ оказывается внутри наружного квадрата указательной метки), то вновь появляется изображение позиции.
Пример дисплейного изображения, показанный на фиг. 8, имеет две двумерные целевые указательные метки. Есть возможность выводить на экран три и более указательных меток или трехмерные указательные метки.
5. Режим изображения "предельная нагрузка-угол поворота"
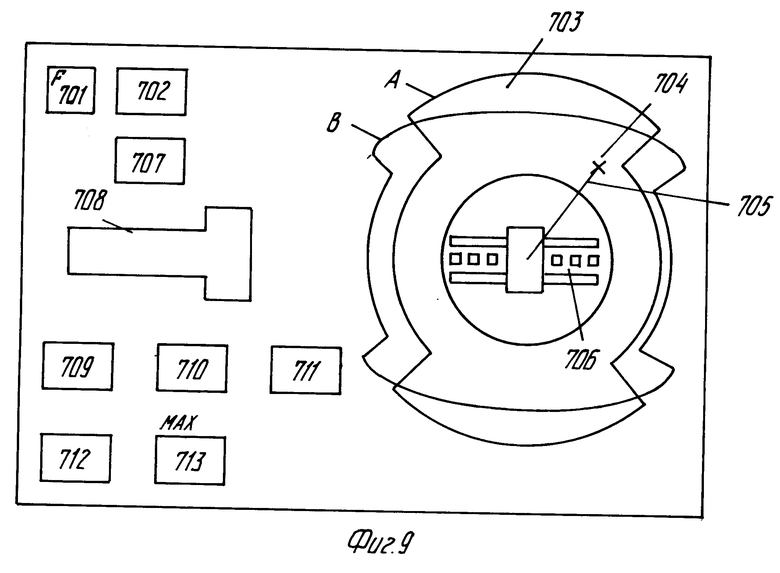
Грузоподъемность крана зависит от размещения крановой конструкции, т.е. от расположения переда, зада, левой стороны и правой стороны, поэтому приходится обращать внимание на угол поворота стрелы. Когда центральное процессорное устройство дисплейного блока входит в режим изображения "предельная нагрузка-угол поворота" после нажима на клавишу на клавиатуре 310B, на дисплейном экране появляется изображение, показанное на фиг. 9. В центральной части экрана представлена схема крана с опорами в позиции 706. В позиции 705 представлен образ стрелы, чтобы был виден угол поворота. Положение креста 704 в конце образа свободного конца стрелы соответствует текущему положению свободного конца стрелы. Сплошная линия А или пунктирная линия В показывают область безопасного диапазона нагрузки 703. Операция считается безопасной, если крест 704 находится внутри этой области. Диапазон безопасной нагрузки на экране изменяется в зависимости от заданного положения опор. Оператор обычно пользуется этим режимом, когда кран повернут на некоторый угол (от средней продольной оси).
Для справочной цели на экране представлены также обозначение режима 701, числовая оценка безопасности 702, численное значение длины стрелы, рабочее состояние стрелы 708, угол наклона стрелы 709, фактическая нагрузка 710, высота подъема 711, рабочий радиус 712 и максимальная нагрузка 713.
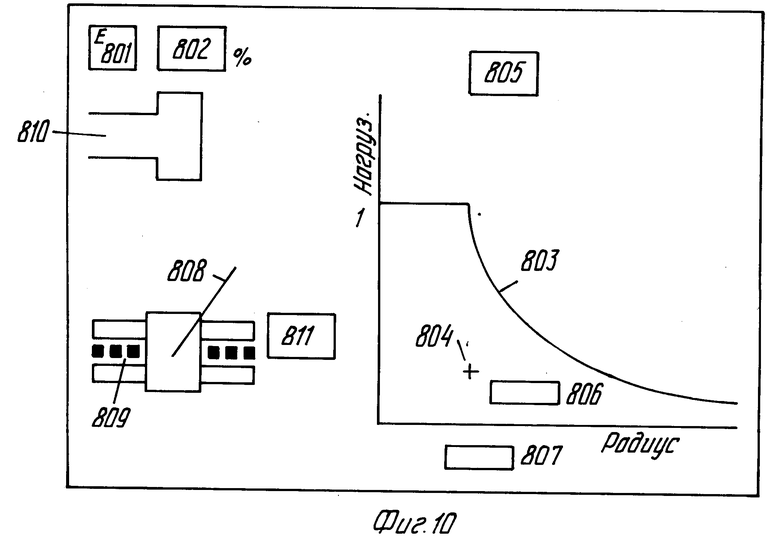
6. Режим изображения "рабочей характеристики"
Типичным параметром, по которому оценивают безопасность работы крана, является отношение кривой грузоподъемности к рабочему радиусу, которое графически проиллюстрировано на фиг. 2. Оператору удобно узнавать границу рабочей безопасности путем визуального опознания текущего рабочего состояния по этой кривой безопасности. После нажима на переключающую режимы клавишу на панели 310B центральное процессорное устройство дисплейного блока входит в режим изображения "рабочей характеристики" и представляет на экране картину, показанную на фиг. 10. Рабочая характеристика формируется с учетом комбинации рабочих параметров крана, подобных состоянию выдвинутости опор, длине стрелы, использованию или неиспользованию консоли, углу поворота и т.д. Центральное процессорное устройство основного блока использует эти рабочие параметры, считывает из памяти ранее запомненные данные о номинальных нагрузках для рабочего радиуса, соответствующих спецификации каждого конкретного крана, и посылает данные о номинальной нагрузке на центральное процессорное устройство дисплейного блока. Центральное процессорное устройство дисплейного блока изображает рабочую характеристику 803 текущего рабочего состояния, подобную представленной, в правой части экрана. Знак "+" в позиции 804 появляется в координатной позиции, соответствующей текущему рабочему радиусу и фактической нагрузке. Оператор может узнать рабочую границу по положению знака "+" относительно этой кривой. Численное значение предельного рабочего радиуса изображается в позиции 806 вблизи знака "+". Изображение численного значения, обозначенного позицией 806, перемещается вместе со знаком "+", поэтому оператору легко считывать это значение.
Для справочной цели во время действия режима изображения "рабочей характеристики" на экран выводятся также текущая фактическая нагрузка 811, угол поворота стрелы 808, положение опор 809 и рабочее состояние стрелы 810.
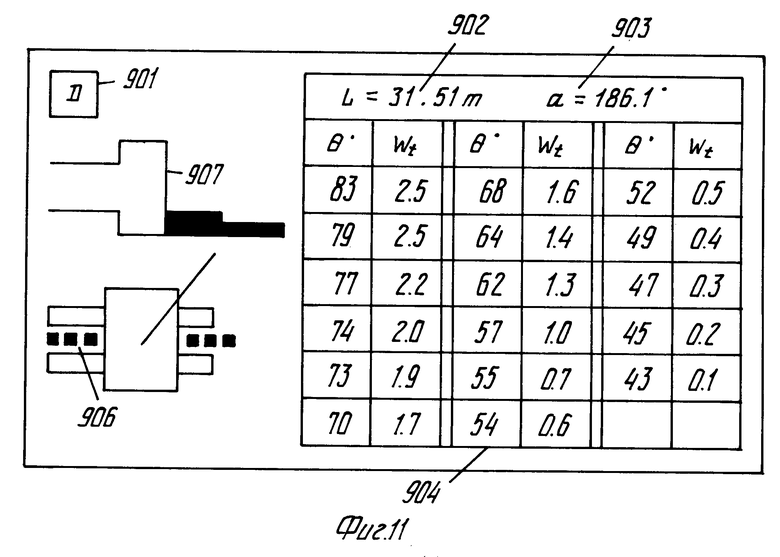
7. Режим изображения "характеристики"
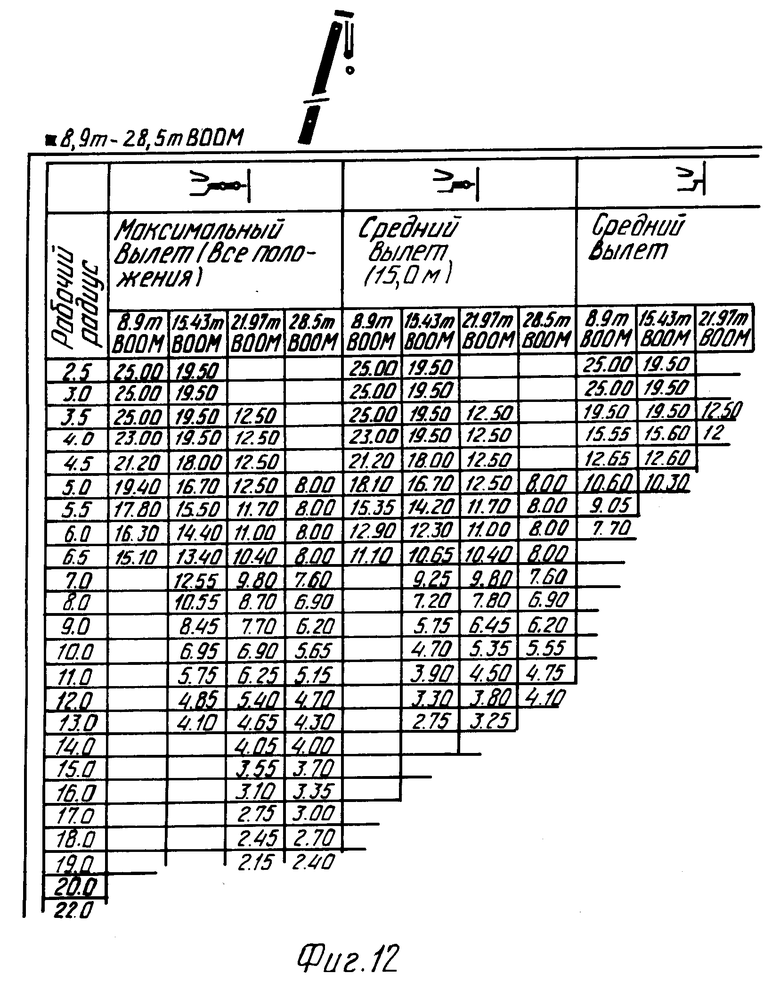
Имеется сводная таблица номинальных нагрузок, подобная показанной на фиг. 14, которой пользуются для обеспечения безопасной работы крана. В этой таблице можно найти номинальные нагрузки для различных значений рабочего радиуса, удовлетворяющие спецификации конкретного крана, при заданных положениях опор и длине стрелы. По таблице оператор может определить, например, соответствуют ли положения опор и длина стрелы поднимаемому грузу и рабочему радиусу перед выполнением операции. После нажима на клавишу на клавиатуре 310B центральное процессорное устройство дисплейного блока выдает на экран изображение, показанное на фиг. 10. Этим режимом пользуются перед выполнением операции, поэтому при действии этого режима кран находится в состоянии останова. Сначала оператор с помощью десяти клавиш 310A вводит численное значение желаемой длины стрелы в позиции 902, где мигает указатель. Во время этого режима введенное значение длины стрелы не воспринимается как фактическое значение длины стрелы. Затем мигающий указатель перемещается в позицию 903, в которую вводится желаемое значение угла поворота. Положение опор и т. д. оказываются заданными после выполнения предыдущего режима "изображения рабочего состояния" (фиг. 4). После ввода этих значений центральное процессорное устройство дисплейного блока получает от центрального процессорного устройства основного блока (или центральное процессорное устройство дисплейного блока может само обладать такими данными) данные о максимальной номинальной нагрузке wt для рабочего угла поворота стрелы при заданных условиях и выводит их в виде таблицы числовых значений 904. Если для некоторой конкретной операции заданные значения длины стрелы и т.д. в результате сравнения с представленными на экране данными окажутся неприемлемыми, таблица этих числовых значений снимается с экрана, после чего надо вновь ввести уточненные значения длины стрелы и т.д.
Для справочной цели во время этого режима на экране представлены обозначение режима 901, рабочее состояние стрелы 907, положение опор 906 и угол поворота 905.
Порядок работы устройства
В соответствии с конструкцией устройства в предпочтительном варианте осуществления основной блок и дисплейный блок, каждый в отдельности имеет центральное процессорное устройство, которое выполняет последовательность операций по собственной программе. Управляющая секция основного блока принимает рабочие параметры от датчиков и данные об установленных рабочих диапазонах от управляющей секции дисплейного блока, рассчитывает фактическую нагрузку, рабочий радиус, предельную нагрузку и тому подобное для обеспечения возможности автоматического останова кранового механизма и пересылает вычисленные данные на дисплейный блок. Управляющая секция дисплейного блока представляет дисплейное изображение для выбранного режима в соответствии с данными, полученными от управляющей секции основного блока, модифицирует дисплейное изображение в соответствии с вводимыми посредством клавиатуры данными и посылает введенные установочные данные на управляющую секцию основного блока. Управляющие секции основного блока и дисплейного блока выполняют последовательности операций независимо, причем обмен данными между ними происходит по прерыванию.
Программа последовательного управления центрального процессорного устройства каждого блока хранится в соответствующей только считываемой памяти. Дисплейный блок имеет видеопамять произвольного доступа. Дисплейные графические данные для выбранного дисплейного режима записаны в памяти произвольного доступа, содержание которой модифицируется при изменении рабочего состояния крана. Графические данные, хранящиеся в видеопамяти произвольного доступа, пересылаются на дисплейный экран для обновления дисплейного изображения, например, с периодом 150 мс.
Передача/прием данных Da и Db основным блоком от дисплейного блока осуществляется в форме информационного обмена с шаговой синхронизацией (асинхронный старт-стоп). Каждый раз, когда основной блок сформирует данные, подлежащие передаче на дисплейный блок, вырабатывается прерывание по запросу на передачу, и центральное процессорное устройство основного блока осуществляет передачу данных. Дисплейный блок генерирует прерывание по запросу на прием и принимает передаваемые данные.
Передача и прием данных дисплейным блоком относительно основного блока осуществляются аналогичным образом.
Данные, отображающие рабочее состояние крана, от разнообразных датчиков поступают на центральное процессорное устройство основного блока через аналого-цифровой преобразователь. Центральное процессорное устройство основного блока принимает данные от датчиков после приема прерывания по запросу на считывание данных с датчиков через предопределенный интервал, соответствующий рабочему циклу аналого-цифрового преобразователя.
Дисплейный блок проверяет состояния клавиатуры ввода с предопределенным периодом и, когда клавиша нажата, обрабатывает вводимые через посредство клавиатуры данные.
Сигнал таймерного прерывания для выполнения процесса с заданной периодичностью поступает на центральные процессорные устройства основного и дисплейного блоков, реализующих соответствующий процесс.
Центральное процессорное устройство дисплейного блока записывает графические данные в видеопамять произвольного доступа, которые оно получило, выводит дисплейное изображение на экран и передает данные об установленных рабочих пределах и т.д. на основной блок.
По данным, полученным основным блоком, центральное процессорное устройство основного блока рассчитывает радиус стрелы, высоту подъема, фактическую нагрузку и предельную нагрузку, сравнивает их с допустимыми данными, определяемыми спецификацией конкретного крана, и выдает управляющий сигнал, например, для автоматического останова крана.
Операционная последовательность основного блока
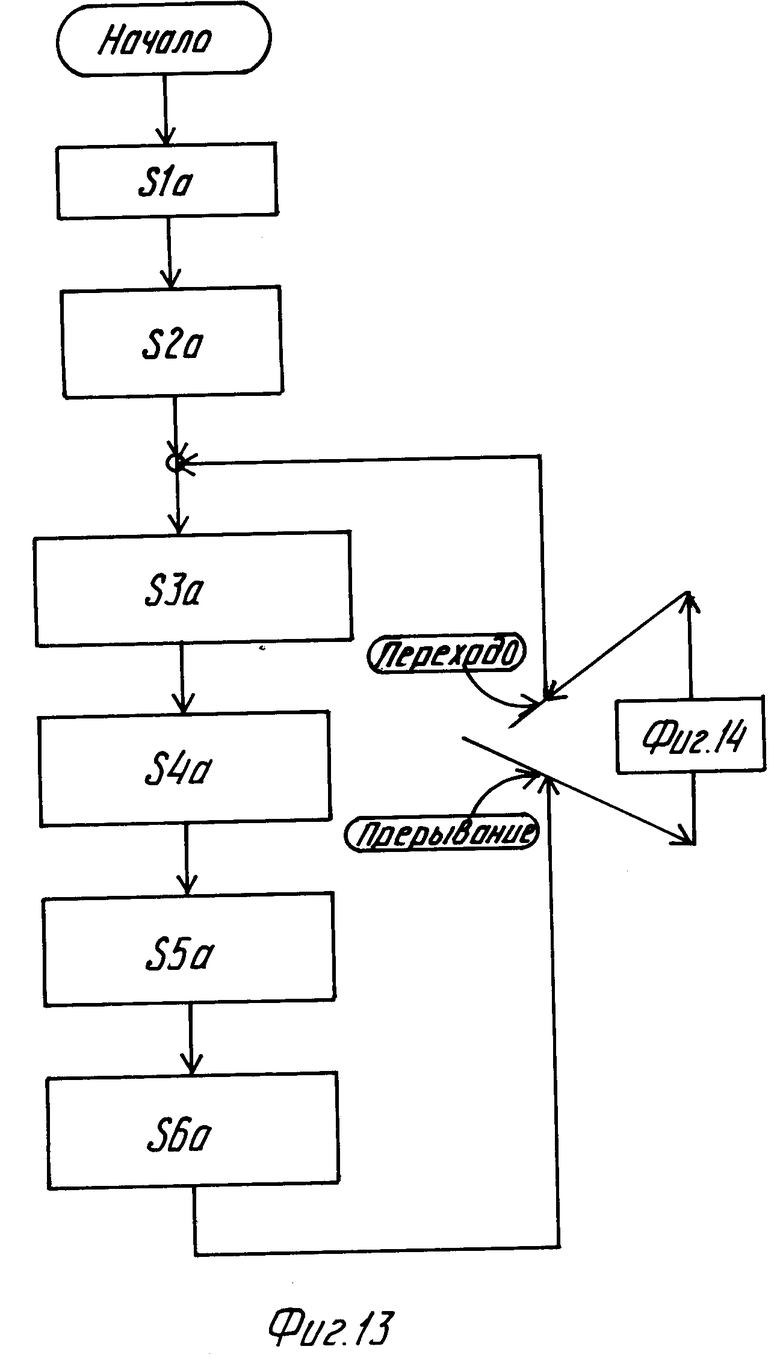
После включения питания или в ответ на активизацию клавиши "сброс" основной блок выполняет основную последовательность от S1a до S6a, представленную на фиг. 13.
На первом шаге S1a устройство проверяет правильность свода его состояния и выполняет исходную процедуру, настраивающую центральное процессорное устройство для правильного исполнения последующей последовательности. Перед этой исходной процедурой прерывание запрещается, а после выполнения этой исходной процедуры на шаге S2a запрет на прерывание снимается.
На шаге S3a выполняется проверка наличия данных для передачи на дисплейный блок и для приема от дисплея. Если в наличии есть такие данные, то осуществляется передача/прием этих данных. Передаваемые данные принимаются основным блоком в соответствии с процедурой жесткого прерывания, которая аналогична процедуре приема данных от датчиков.
Принятые и обработанные данные подвергаются разнообразным арифметическим операциям на шаге S4a. В частности, вычисляются рабочие параметры крана, подобные фактической нагрузке, радиусу стрелы, высоте подъема и т.д. по длине стрелы, углу наклона стрелы, напряжению и т.д. и предельная нагрузка по параметрам и данным о предельной нагрузке, введенные ранее и взятые из спецификации крана.
На основании результатов арифметических операций, выполненных на шаге S4a, рассчитывается степень безопасности работы крана, заданное значение рабочего предела сравнивается с рабочим состоянием крана и осуществляется автоматический останов на шаге S5a, если работа крана оказывается опасной или достигнут рабочий предел.
После выполнения названных выше последовательных шагов центральное процессорное устройство основного блока входит в состояние HALT (останов) на шаге S6a. Центральное процессорное устройство основного блока принимает внешний запрос на жесткое прерывание (IREO), подобный запросу на считывание данных, и выполняет обработку прерывания (которая проиллюстрирована на фиг. 11). После обработки прерывания происходит возврат к начальной точке петли. Если нет запроса на жесткое прерывание, центральное процессорное устройство основного блока остается на шаге S6a. Хотя жесткое прерывание показано на фиг. 10 между шагом S6a и начальной точкой петли, оно может поступать на любом шаге от S3a и S6a.
В основном процессе прием данных основным блоком и передача данных на дисплейный блок производятся после приема запроса на прерывание. При приеме новых данных или передаче данных выполняется некоторая последовательность операций, включающая в себя обмен данными с дисплейным блоком, арифметические операции над данными и обработку автоматического останова.
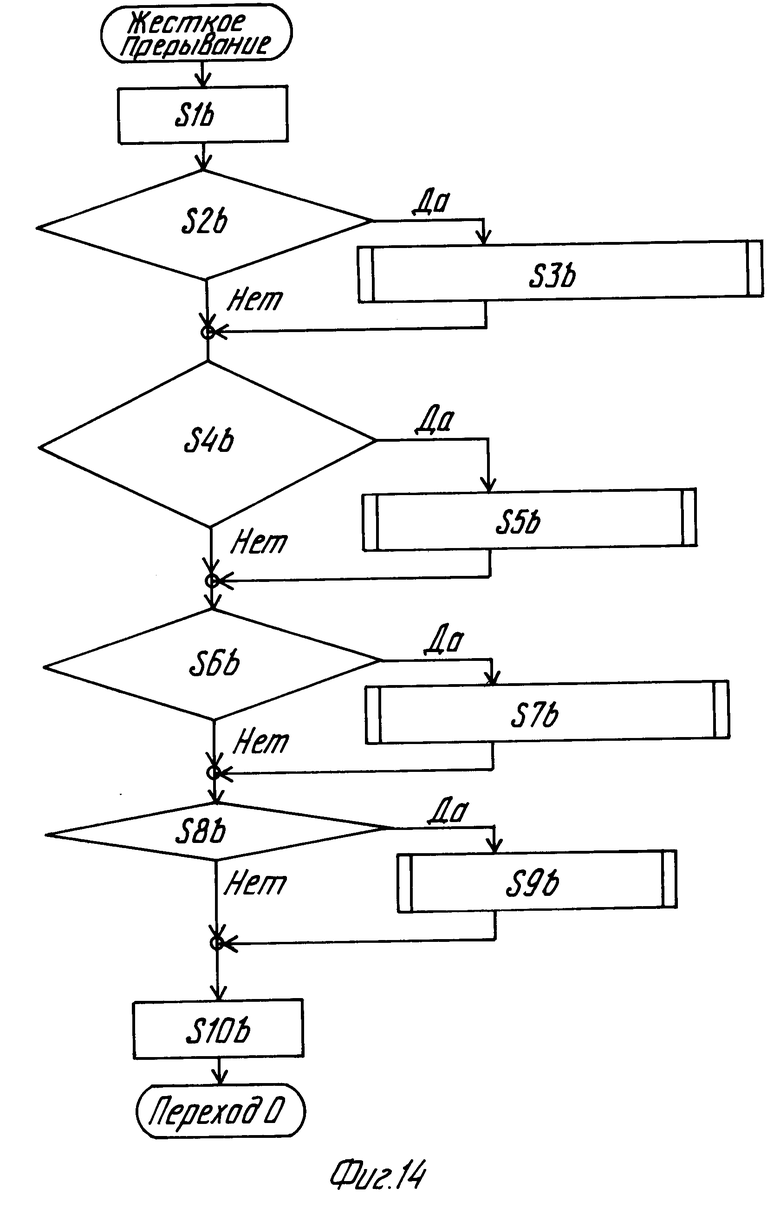
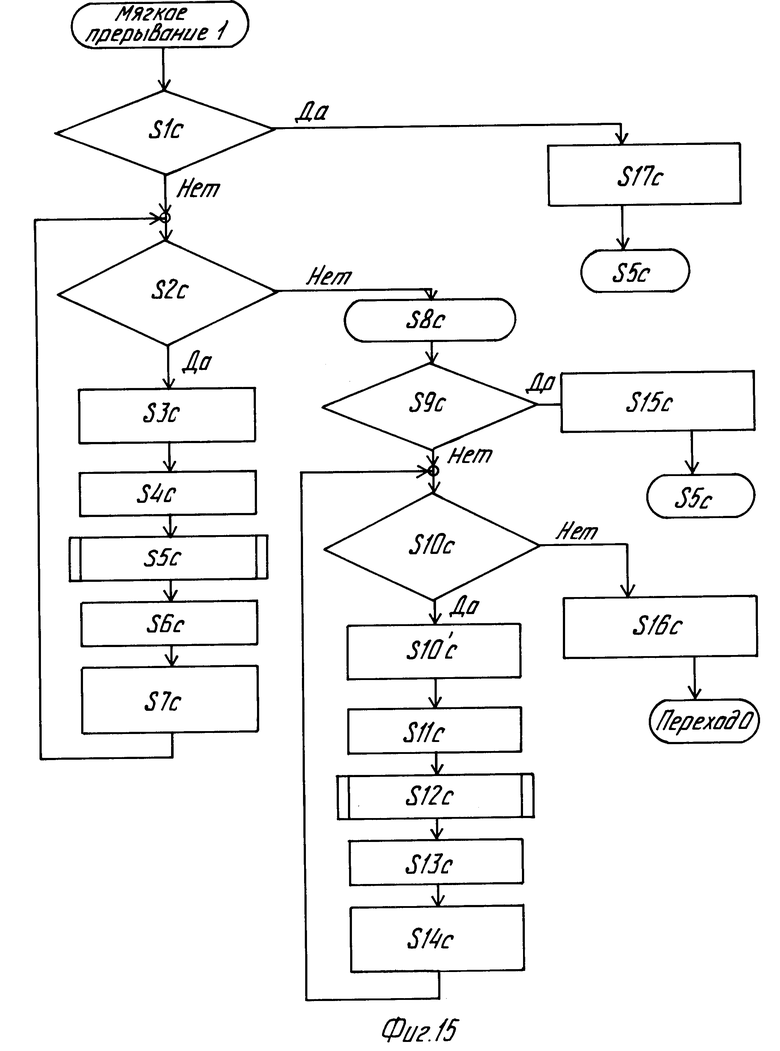
Процедура прерывания (фиг. 14) начинается после приема запроса на жесткое прерывание. Процедура прерывания, начавшаяся по запросу на жесткое прерывание, включает в себя прием/передачу данных и процедуры мягких прерываний 1 и 2 (фиг. 15). При каждом поступлении запроса на жесткое прерывание осуществляется прием/передача данных. Когда после определенного количества приемов/передач по запросам жесткого прерывания объем данных достигает блока, устанавливается флажок начала (активизации) мягкого прерывания 1. После установления флажка начала мягкого прерывания 1 выполняется процедура отработки мягкого прерывания 1 и устанавливается флажок начала мягкого прерывания 2. После установления флажка начала мягкого прерывания 2 выполняется процедура отработки мягкого прерывания 2.
Жесткое прерывание и мягкие прерывания 1 и 2 имеют иерархическую структуру. Прием данных, осуществляемый за короткое время, выполняется при жестком прерывании, и на время его осуществления запрещается следующее жесткое прерывание. Обработка, требующая более длительного времени, выполняется при мягком прерывании 1, и обработка, которая требует затрат времени сравнительно больших, выполняется при мягком прерывании 2. Жесткое прерывание разрешено при выполнении мягкого прерывания, в результате чего сокращается длительность запрета прерывания и повышается скорость обработки вводимых/выводимых данных.
Как показано на фиг. 14, после приема запроса на жесткое прерывание основной последовательностью операций, проиллюстрированной на фиг. 13, следующее прерывание запрещается на шаге S1b. Тип прерывания проверяется на шагах с S2b до S9b: предназначается ли прерывание для приема данных от дисплейного блока и передачи данных на него, для приема данных от датчиков или запроса на прерывание от таймера. В соответствии с опознанным типом осуществляется необходимая обработка жесткого прерывания. В частности, данные, принятые от дисплейного блока, запоминаются в области временного хранения; данные, подлежащие пересылке на дисплейный блок, пересылаются из области временного хранения на передатчик и передаются на дисплейный блок, или данные, принимаемые от датчиков, запоминаются в области временного хранения. Если общий объем принятых/переданных данных достигает блока после определенного числа местных прерываний, устанавливается флажок начала мягкого прерывания 1.
После завершения обработки мягкого прерывания начинается последовательность S3b (фиг. 15) мягкого прерывания. После завершения этой последовательности мягкого прерывания 1 происходит возврат к основной последовательности операций (RETO), представленной на фиг. 13.
Как видно на фиг. 15, последовательность мягкого прерывания 1 предусматривает проверку установки флажка "обработка мягкого прерывания 1" (шаг S1c). Если флажок не установлен и обработка не ведется, то производится проверка наличия установленного флажка начала мягкого прерывания 1 (шаг S2c). Если флажок не установлен по причине незначительного объема данных, подлежащих обработке, происходит продвижение по основной последовательности операций до шага S8c. Если мягкое прерывание 2 не обрабатывается и флажок начала мягкого прерывания 2 не установлен, происходит продвижение по основной последовательности операций через шаги S9c и S10c к шагу S16c. На шаге S16c содержимое регистра установки состояния восстанавливается и снимается запрет на прерывания, установленный на шаге S1b, показанный на фиг. 14, после чего происходит возврат к основной последовательности операций (RETO), представленной на фиг. 13.
Описанный выше случай показывает, что жесткое прерывание происходит в ходе основной последовательности операций, данные принимаются на шаге S3b, проиллюстрированном на фиг. 14, и происходит возврат к основной последовательности операций.
Если будет обнаружено, что флажок начала мягкого прерывания 1 установлен на шаге S2c (фиг. 15), то устанавливается флажок "обработка мягкого прерывания 1" (шаг S3с). Поскольку выполнение жесткого прерывания разрешено во время обработки мягкого прерывания 1, то снимается запрет на прерывание, установленный на шаге S1b, проиллюстрированном на фиг. 14 (шаг S4c), после чего выполняется обработка мягкого прерывания 1 (шаг S5c). Во время обработки мягкого прерывания 1 сбрасывается флажок начала мягкого прерывания 1 и, если соблюдены условия, устанавливается флажок начала мягкого прерывания 2. После завершения обработки мягкого прерывания 1 вновь устанавливается запрет на жесткое прерывание и сбрасывается флажок "обработка мягкого прерывания 1" (шаг S7c) для возврата в начальную точку петли на шаге S2c. В это время, поскольку сброшен флажок начала мягкого прерывания 1, совершается переход от шага S2c к шагу S8c для обработки мягкого прерывания 2. На шаге S8c, если не происходит обработка мягкого прерывания 2 и не установлен флажок начала мягкого прерывания 2, совершается переход через шаги S9c и S10c к шагу S16c, на котором в начале прерывания происходит восстановление содержимого регистра установок состояния и снимается запрет на прерывания, установленный на шаге S5c, чтобы произошел переход к основной последовательности операций (RETO), представленной на фиг. 13.
Приведенный выше случай иллюстрирует, что данные принимаются после начала жесткого прерывания, объем данных накапливается до одного блока, устанавливается флажок начала мягкого прерывания 1, осуществляется обработка одного блока данных по мягкому прерыванию 1 и выполняется переход к основной последовательности операций.
Поскольку жесткое прерывание разрешено во время обработки мягкого прерывания 1 последовательности мягких прерываний, оно может произойти на шаге S5c обработки мягкого прерывания 1. Когда жесткое прерывание случается на шаге S5c обработки мягкого прерывания 1, процедура жесткого прерывания осуществляется таким образом, что данные принимаются на шагах с S1b и S3b, показанных на фиг. 14. Затем происходит переход к шагу S1c и шагу S17c, показанным на фиг. 15, для восстановления содержимого регистра и снятия запрета на прерывания, а также для возврата к точке прерывания на шаге S5c с целью возобновления обработки мягкого прерывания 1. Описанным выше образом данные можно принимать путем жесткого прерывания даже во время обработки мягкого прерывания 1.
Предполагается, что во время обработки мягкого прерывания устанавливается флажок начала мягкого прерывания 2. В этом случае после завершения обработки мягкого прерывания 1 и сброса флажка начала мягкого прерывания 1 происходит переход от шага S2c к шагу S8c для начала выполнения последовательности обработки мягкого прерывания 2. Если обработка мягкого прерывания 2 не выполняется, то происходят переходы от шага S9с к шагу S10c и к шагам S10c, S11c, S12c, S13c и S14c для осуществления обработки мягкого прерывания 2 и возврата к начальной точке петли. В это время, поскольку флажок начала обработки мягкого прерывания 2 сброшен, совершается переход через шаг S16c к основной последовательности операций (RETO) для завершения серии прерываний.
Жесткое прерывание разрешено во время обработки мягкого прерывания 2, так же как и во время обработки мягкого прерывания 1. Если жесткое прерывание случится во время обработки мягкого прерывания 2, данные принимаются в последовательности, показанной на фиг. 14, и выполняется переход через шаги S1c, S2c, S8c и S9c к шагу S15c, на котором содержимое регистра восстанавливается и снимается запрет на прерывание для возврата (RЕТ2) к точке прерывания обработки мягкого прерывания 2 на шаге S12c.
Операционная последовательность дисплейного блока
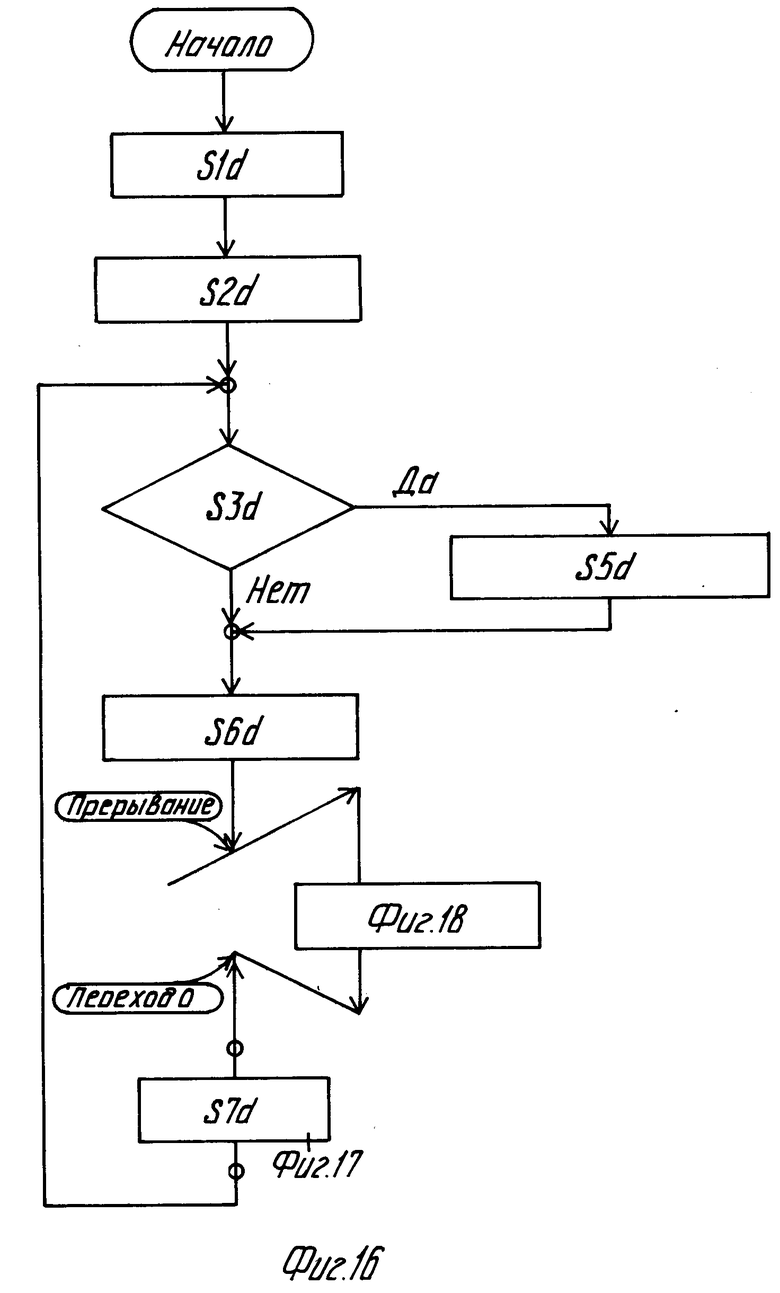
Основная последовательность операций для дисплейного блока показана на фиг. 16. После выполнения начальной процедуры на шаге S1d, гарантирующей правильность исполнения дальнейшей последовательности, снимается запрет на прерывание на шаге 2.
Чтобы имелась возможность изображать на экране рабочее состояние крана, которое изменяется с течением времени, данные для графического представления на экране изображений, соответствующих выбираемым режимам, предварительно записываются в видеопамять произвольного доступа. Данные о графических изображениях считываются из видеопамяти произвольного доступа с определенной периодичностью, например 150 мс, для создания и обновления изображения на экране. В настоящем варианте осуществления данные о графических изображениях хранятся в видеопамяти произвольного вольного доступа в виде числовых значений координатных точек с обоих концов каждого строчного сегмента, составляющего дисплейное изображение. Если флажок регенерации изображения или флажок обновления указателя устанавливается на шаге S3d, данные из видеопамяти произвольного доступа пересылаются на дисплей для регенерации дисплейного изображения на шаге S5d.
После включения питания или сброса данные об исходном изображении, хранящиеся в видеопамяти произвольного доступа, при начальной процедуре появляются на экране. Затем центральное процессорное устройство дисплейного блока входит в состояние HALT (останов) и не будет выполнять следующую команду до поступления запроса на жесткое прерывание.
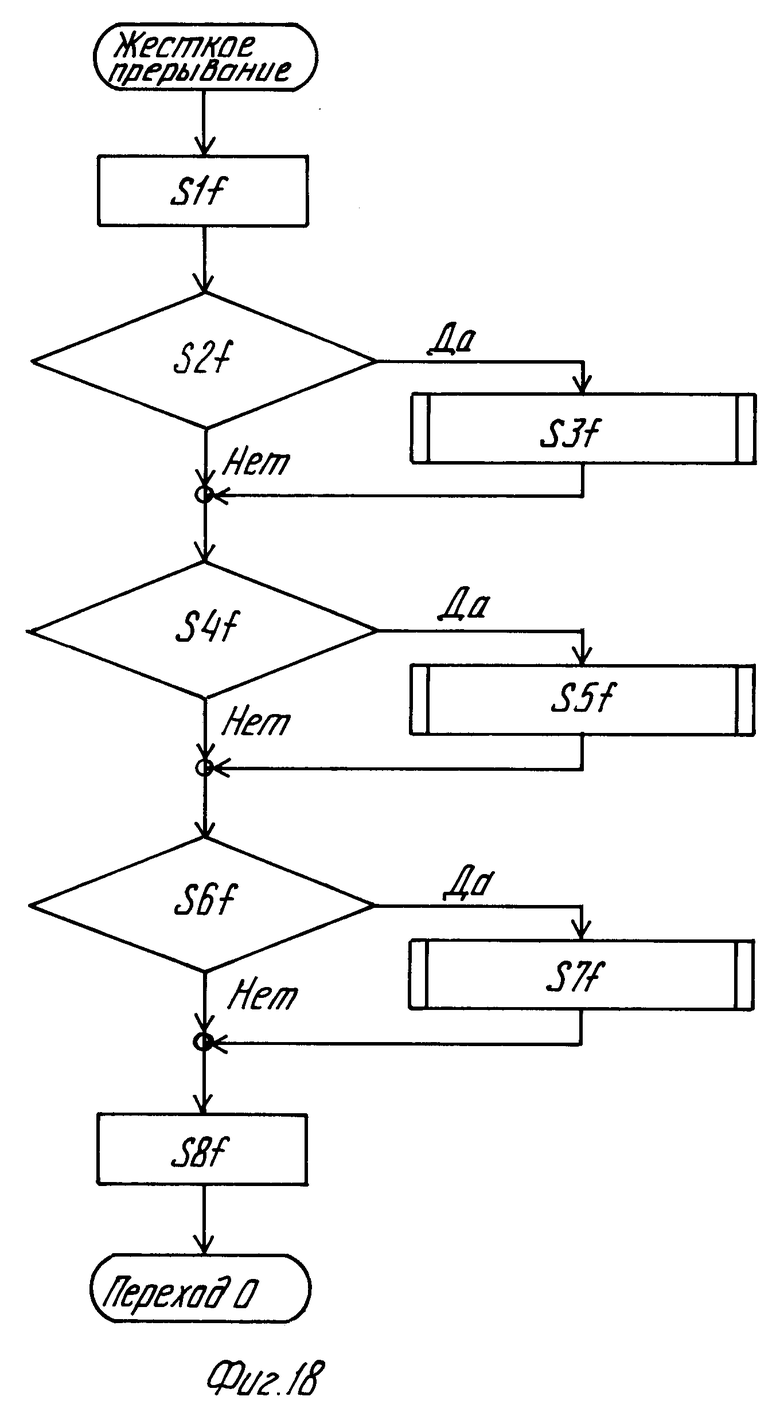
Запрос на жесткое прерывание для центрального процессорного устройства дисплейного блока генерируется по таймерному прерыванию и запросом на передачу-прием данных от центрального процессорного устройства основного блока. Установочная информация или данные, подлежащие передаче или приему, передаются или принимаются в соответствии с типом прерывания (фиг. 18).
После обработки прерывания происходит переход к выполнению основной последовательности операций и обработке, соответствующей заданному режиму. Режимные обработки всегда начинаются по жесткому прерыванию, которое разрешено во время режимной обработки. Жесткое прерывание запрещено лишь в том случае, если осуществляется обработка жесткого прерывания, требующего для своего исполнения короткое время.
После предопределенной задержки начала работы дисплейного блока автоматически устанавливается флажок режима ввода рабочего состояния по запросу прерывания от таймера (фиг. 18). После завершения обработки таймерного прерывания выполняется шаг "оценки" S1e, показанный на фиг. 17, и на шаге S2e выполняется процедура обработки режима ввода рабочего состояния. В ходе этой процедуры данные о графическом изображении записываются в видеопамять произвольного доступа, после чего происходит переход к начальной точке петли на шаге 3. На шагах S3d и S5d центральное процессорное устройство дисплейного блока пересылает данные о графическом изображении на экран дисплея. После этого центральное процессорное устройство дисплейного блока останавливается. Оператор нажимает клавишу установки положения консоли, наблюдая за экраном, и данные об установке консоли считываются центральным процессорным устройством дисплейного блока. Далее центральное процессорное устройство дисплейного блока модифицирует данные о графическом изображении, хранящиеся в видеопамяти произвольного доступа, в соответствии с данными об установке консоли. Графические данные о введенном рабочем состоянии, модифицированные и запомненные в видеопамяти произвольного доступа, появляются на экране на шагах S3d и S5d.
Режимная обработка на шаге S2e выполняет описанную выше обработку дисплейного изображения, а также другие обработки, подобные запоминанию переданных основным блоком данных в области временного запоминания.
Сущность обработок, выполняемых на шагах с S3e по S14e, зависит от конкретного режима.
Данные, вводимые клавиатурой, считываются с заданной периодичностью с помощью запроса таймера на прерывание, и, когда клавиша нажата, происходит соответствующая обработка.
Последовательность операций мягкого прерывания для дисплейного блока совпадает с последовательностью операций для мягкого прерывания основного блока, показанной на фиг. 15, хотя содержание каждого шага иное.
Сущность каждой обработки
Обработки при приеме (1). Последовательные данные, посланные основным (дисплейным) блоком, последовательно запоминаются в специальной буферной области. Когда оказывается принятым один блок данных, эти данные проверяются, и, если они не обнаруживают ненормальность, устанавливается флажок начала приемной обработки (2). Эта приемная обработка осуществляется по жесткому прерыванию, показанному на фиг. 14 и 18.
Приемная обработка (2). Содержимое одного блока данных, переданных основным (дисплейным) блоком, проверяется и запоминается в предопределенной области памяти по адресу, который доступен центральному процессорному устройству. Эта приемная обработка выполняется по мягкому прерыванию 1 на шаге S5c, показанном на фиг. 15.
Приемная обработка (3). Конечной обработке подвергаются данные, поступившие от основного (дисплейного) блока и запомненные в памяти. Эта приемная обработка осуществляется по мягкому прерыванию 2 на шаге S12c, показанном на фиг. 15, или во время обработки принятых данных на шаге S3a основной последовательности операций, представленной на фиг. 13.
Передаточная обработка (1). Проверяется наличие данных для передачи на основной (дисплейный) блок. Если такие данные имеются, они считаются требующими пересылку и активизируется передаточная обработка (2). Эта передаточная обработка выполняется на шаге S3a основной последовательности операций, показанной на фиг. 13, или на шаге S12c, показанном на фиг. 15.
Передаточная обработка (2). Проверяется наличие разрешения на передачу. Если разрешение есть, передаваемые данные считываются из области памяти, где они хранятся, преобразуются в последовательные данные, которые затем запоминаются в передаточной области памяти, после чего начинается передаточная обработка (3). Эта передаточная обработка осуществляется при мягком прерывании 1 на шаге S5c, показанном на фиг. 15.
Передаточная обработка (3). Данные, находящиеся в передаточной области памяти, последовательно и серийно передаются. Эта передаточная обработка осуществляется на шаге S7b, показанном на фиг. 14.
Как видно на фиг. 16, приемо- передаточная обработка данных дисплейным блоком не входит в основную последовательность операций, и прием/передача данных выполняется при обработке мягкого прерывания 1. Причина, по которой основная последовательность операций основного блока содержит приемо-передаточную обработку, состоит в следующем. Основной задачей основного блока является выполнение арифметических операций и операции автоматического останова. Поскольку эти операции включены в основную последовательность операций, то нет преимущества в том, что если данные, передаваемые дисплейным блоком, будут "мягко прерываться", однако есть недостаток, заключающийся в том, что будут задерживаться обработки арифметических операций и автоматического останова. Поскольку арифметические операции занимают длительное время и для них требуется известное количество данных, целесообразнее выполнять арифметические операции и операцию автоматического останова не при мягком прерывании, а в основной последовательности операций. С другой стороны, дисплейный блок выполняет приемную/передаточную операцию не при следовании основной последовательности операций, а при мягком прерывании. Поскольку длительность задействования оператором клавиатурных клавиш для каждого режима различна и данные от основного блока используются при обработке при мягком прерывании, целесообразнее приемную обработку выполнять при мягком прерывании.
Дополнительно, поскольку данные, присланные от основного блока, не генерируются в основной последовательности операций, а поступают в качестве вводимых с клавиатуры данных, целесообразнее передаточную обработку выполнять не в основной последовательности операций, а по мягкому прерыванию. В соответствии с приведенными выше различиями обработок основным и дисплейным устройством приемо-передаточная обработка выполняется по-разному основным блоком и дисплейным блоком.
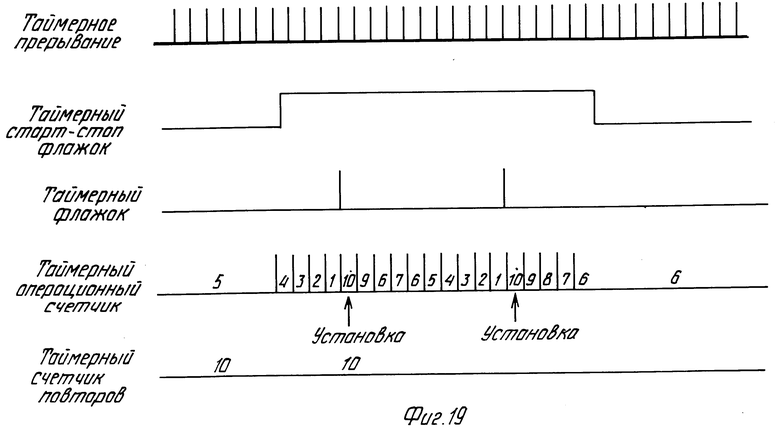
Таймерное прерывание происходит каждые 10 мс в работе основного блока. Также предусмотрен "мягкий" таймер для 16 каналов. 8 каналов используются мягким таймером мягких прерываний 1, а остальные 8 каналов используются "мягким" таймером мягких прерываний 2.
Мягкий таймер построен из таймерного "старт-стоп" флажка, операционного счетчика и счетчика повторов. Операционный счетчик и счетчик повторений мягкого таймера мягких прерываний 1, каждый имеет емкость в один байт, а счетчики для мягких прерываний 2 имеют емкость в два байта. Таймерный "старт-стоп" флажок используется для управления работой мягкого таймера, флажок мягкого прерывания 1 занимает один байт (8 бит), при этом каждый бит соответствует одному из восьми таймеров. Каждый мягкий таймер работает, пока флажковый бит равен 1, и останавливается, когда флажковый бит оказывается равным 0. Например, когда один из бит таймерного "старт-стоп" флажка становится "1", операционный счетчик уменьшает свое содержимое на единицу при каждом случае жесткого таймерного прерывания. Когда содержимое операционного счетчика становится равным нулю ("0"), что означает, что время истекло, устанавливается флажок для мягкого прерывания 1 или 2 и операционный счетчик загружается содержимым счетчика повторений. Эта операция повторяется, пока таймерный "старт-стоп" флажок не станет равен 0. Таким образом, таймер мягких прерываний 1 можно настроить на временной интервал от 10 до 1,55 мс, а таймер мягких прерываний 2 может отсчитывать временные интервалы от 50 мс до 54,6125 мин.
Это мягкое таймерное прерывание используется следующим образом. Дисплейный блок принимает данные от клавиатуры в некоторый момент, предшествующий предопределенному моменту. Дисплейный блок также устанавливает флажок регенерации дисплея, таймер первоначальной процедуры и т.п. Основной блок устанавливает голосовой таймер, таймер первоначальной процедуры, таймер проверок ошибок связи и т.п. Если счетчик повторений таймера содержит 10 и операционный счетчик таймера ведет счет в сторону уменьшения начального содержания счетчика, то таймерный флажок устанавливается спустя 5х (период прерываний таймера) после установки таймерного "старт-стоп" флажка. Затем флажок устанавливается с периодом около 10х (период таймерного прерывания) до тех пор, пока не будет сброшен таймерный "старт-стоп" флажок. Таймерный флажковый сигнал, показанный на фиг. 19, является сигналом для мягкого прерывания 1 или 2. Этот флажок сбрасывается, когда осуществляется соответствующая обработка.
В описанном изобретении термин "crane" (кран) используется не только для обозначения механизма, смонтированного на средстве передвижения, но и других механизмов, поднимающих груз с помощью стрелы, подобных транспортному средству, работающему на возвышенной платформе, для перемещения башенного типа крана или ковша вверх-вниз и вправо-влево.

Использование: для предоставления оператору данных о рабочих настройках крана и рекомендации по безопасности в соответствии с избранным режимом дисплейного изображения. Сущность изобретения: крановое предохранительное устройство для воспроизведения схематичной диаграммы некоторой части кранового механизма на двумерном экране динамично во время работы кранового механизма и изображения на том же самом экране определенной рабочей зоны в виде визуально выделяющейся зонной картины. Картина рабочей зоны воспроизводится на экране по команде от клавиши, которую активирует оператор во время заданного режима работы крана, совместно со схематичной диаграммой кранового механизма, воспроизводимой на экране в текущий момент. 2 с.п. ф-лы, 19 ил.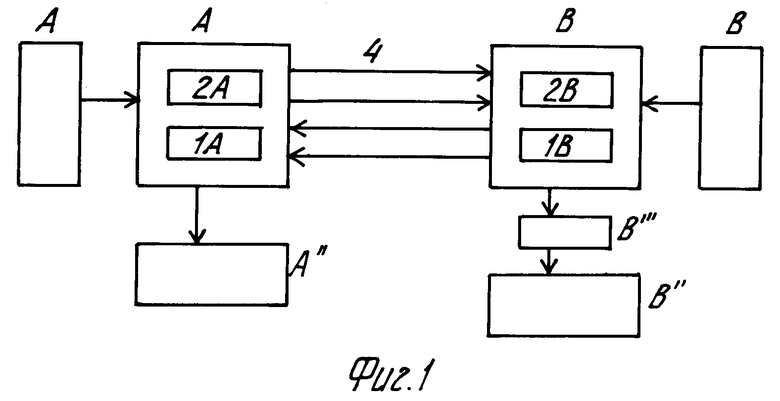
| Заявка Японии N 5874496, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |

