Изобретение относится к области лазерной техники и используется для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может быть использовано при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или своды мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах и т.п.
Известен способ формирования постоянных размеров информационного поля лазерной системы телеориентации в плоскости управляемого объекта и устройство для его осуществления (патент РФ №2093849). Способ и устройство его реализующее основаны на сканировании акустооптическими дефлекторами излучения лазера с "иглообразной" диаграммой направленности по заданной траектории, причем угол сканирования дефлектора изменяется при удалении объекта управления так, чтобы линейный размер информационного поля в плоскости объекта управления оставался постоянным и не превышал заданную ошибку.
В данном изобретении применение "иглообразной" диаграммы направленности лазерного излучения приводит к появлению в формируемом поле управления зон с отсутствием лазерного излучения, что приводит к потере управления объектом. Априори считаемся выполненным условие, когда управляемый объект после старта однозначно попадет в зону лазерного поля управления. Так как это не так, то в момент старта необходимо формировать информационное поле больших угловых размеров, что можно осуществить, используя на выходе устройства телескопическую систему, работающую на уменьшение изображения. Применение такой телескопической системы приводит к увеличению угловых размеров лазерного поля управления, но при этом возрастает расходимость лазерного излучения и, следовательно, уменьшается дальность управления объектом.
Для увеличения дальности управления объектом может быть использован второй канал управления, имеющий на выходе телескопическую систему, работающую на увеличение изображения, при этом необходимо будет осуществлять переключение каналов таким образом, чтобы центры информационных полей совпадали. Реализация такого решения осуществлена с помощью устройства стабилизации лазерной системы телеориентации (патент РФ №2381625).
В качестве прототипа для заявляемого способа выбран способ формирования информационного поля лазерной системой телеориентации (патент РФ №2383896), заключающийся в поочередном формировании поля управления объектом двумя прямоугольными лазерными растрами, образованными за счет сканирования лазерного пучка в каждом растре одной сплошной (размытой) строкой, развернутыми относительно друг друга на 90°. Формирование строки в каждом растре осуществляют за счет трех тактов сканирования с заданными задержками между тактами, причем только два соседних такта строки имеют встречное направление сканирования и равные временные задержки, при этом формирование сплошной (размытой) строки осуществляют с помощью соответствующего акустооптического дефлектора, на который подают ультразвуковую волну с линейной частотной модуляцией в заданном частотном диапазоне.
Наиболее близким устройством, выбранным в качестве прототипа для заявляемого технического решения, является лазерная система телеориентации (патент РФ №2267734), которая включает в себя лазер, оптико-электронную систему сканирования, выходную оптическую систему и блок управления дефлекторами. Блок управления дефлекторами содержит блок формирования синхросигналов и параметров растра, формирователь кодов растра, формирователь кодов смещения, сумматор и двухканальный синтезатор частот, при этом для улучшения захвата цели в момент старта используется команда "Сход", поступающая па вход блока формирования синхросигналов с задержкой, равной времени выхода управляемого объекта в начальную зону управления.
В указанных прототипах точность управления объектом определяется точностью установки лазерной системы телеориентации относительно идеальной траектории движения управляемого объекта, что осуществимо только на специальном стенде и трудновыполнимо в полевых условиях. При этом, если местность изобилует преградами, то вероятность довести объект до цели невысока, так как информация о случайных преградах не заложена в жесткую программу управления объектом. Кроме этого, так как начало траектории управления объектом зависит от таких условий разгона объекта, как изменение параметров горения топлива стартового двигателя при изменении температуры внешней среды, и даже незначительного отклонения стартовых направляющих при вибрации, то начальная точка управляемой траектории может отклоняться от заданной траектории на несколько метров. Последний недостаток может быть устранен либо при использовании системы, имеющей два канала управления объектом и измерительный канал, что существенно сказывается на габаритных размерах системы, на ее надежности и усложняет ее управление, либо при использовании на выходе телескопической системы, обеспечивающей большие угловые размеры растра, что приводит к увеличению расходимости лазерного излучения и, следовательно, к уменьшению дальности управления объектом.
Технические результаты заявляемых способа и устройства для его реализации направлены на осуществление автоматического управления положением лазерных растров управления объектом в зависимости от начальной траектории движения объекта после старта и формирования траектории управления объектом вне зависимости от точности установки лазерной системы телеориентации объекта относительно идеальной траектории движения управляемого объекта, а также управления объектом с учетом преград на траектории его движения.
Сущность заявляемых способа лазерной телеориентации объекта и устройства для его реализации поясняется рисунком.
Технический результат заявляемого способа лазерной телеориентации объекта достигается тем, что изменение траектории движения управляемого объекта осуществляют путем угловой коррекции поля управления объектом, которое формируют поочередно двумя прямоугольными лазерными растрами, развернутыми друг относительно друга на 90° и образованными за счет сканирования лазерного пучка в каждом растре одной сплошной (размытой) строкой, при этом формирование сплошной строки (размытие строки) осуществляют с помощью двух скрещенных анизотропных акустооптических ячеек, на которые с блока управления дефлекторами подают высокочастотные сигналы с линейной частотной модуляцией, частотный диапазон которых определяет угловые размеры лазерных растров, причем управляемый объект получает информацию о своем пространственном положении относительно центров двух прямоугольных лазерных растров с помощью установленного на нем фотоприемного устройства, при этом используют блок коррекции кодов смещения, с помощью которого выполняют вычисление текущих угловых координат управляемого объекта и угловых координат цели, а также осуществляют отслеживание окружающей обстановки и поиск препятствий, причем угловую коррекцию поля управления объектом осуществляют в соответствии с программой управления объектом, содержащейся в блоке управления дефлекторами, и данными, поступающими в него с блока коррекции кодов смещения.
Способ лазерной телеориентации объекта заключается в том, что изменение траектории движения управляемого объекта осуществляют путем угловой коррекции поля управления объектом (ПУО). ПУО формируют поочередно двумя прямоугольными лазерными растрами, развернутыми друг относительно друга на 90° и образованными за счет сканирования лазерного пучка в каждом растре одной сплошной (размытой) строкой. Сканирование лазерного пучка, излучаемого лазером 1, выполняют с помощью оптико-электронной системы сканирования (ОЭСС) 2. При этом осуществляют формирование сплошной строки (размытие строки) с помощью двух скрещенных анизотропных акустооптических ячеек (АОЯ) 3 и 4, на которые с блока управления дефлекторами (БУД) 5 подают высокочастотные сигналы с линейной частотной модуляцией. Частотный диапазон данных сигналов определяет угловые размеры лазерных растров и положение их центров относительно пространственного положения цели и текущего положения управляемого объекта. Управляемый объект, находящийся в пределах ПУО, получает информацию о своем пространственном положении относительно центров двух прямоугольных лазерных растров с помощью установленного на нем фотоприемного устройства. Для угловой коррекции ПУО используют блок коррекции кодов смещения (БККС) 6, который с помощью видеокамеры объекта (ВО) 7, узла контроля положения объекта (УКПО) 8, видеокамеры цели (ВЦ) 9 и узла контроля положения цели (УКПЦ) 10, производит вычисление текущих угловых координат управляемого объекта (УО) 11 и угловых координат цели 12.
ВО 7 направляют в зону стартового выхода управляемого объекта 11 и используют для контроля его пространственного положения. ВО 7 имеет большой угол зрения, достаточный для того, чтобы управляемый объект находился в ее поле зрения. ВЦ 9, имеющую большое увеличение и малый угол зрения, используют для обнаружения и сопровождения цели 12, а также определения точности установки лазерной системы телеориентации относительно цели. В соответствии с программой управления объектом, содержащейся в БУД 5, и данными, поступающими в пего с БККС 6, осуществляют угловую коррекцию ПУО, обеспечивая устойчивое управление движением УО 11 к цели 12. При этом лазерные растры имеют небольшие угловые размеры, что позволяет увеличить дальность управления объектом, используя выходную оптическую систему (ВОС) 13, работающую на увеличение изображения.
ВО 7 используют также для отслеживания окружающей обстановки и поиска препятствий, которые могут быть на пути движения управляемого объекта 11 (пыль, дым, дерево и т.п.). Тогда при обнаружении препятствий осуществляют угловую коррекцию ПУО с целью отклонения траектории движения управляемого объекта и преодоления препятствий.
Для более точного определения пространственного положения препятствий может быть использован дальномер.
Для достижения технического результата в известную лазерную систему телеориентации, включающую в себя лазер, оптико-электронную систему сканирования, выходную оптическую систему и блок управления дефлекторами, который содержит формирователь кодов растра, формирователь кодов смещения и двухканальный синтезатор частот, введен блок коррекции кодов смещения, который состоит из видеокамеры объекта, узла контроля положения объекта, видеокамеры цели и узла контроля положения цели.
Лазерная система телеориентации (ЛСТ) содержит лазер 1, оптико-электронную систему сканирования (ОЭСС) 2, состоящую из двух скрещенных анизотропных акустооптических ячеек (АОЯ) 3 и 4, выходную оптическую систему (ВОС) 13, установленные последовательно по ходу излучения, а также блок управления дефлекторами (БУД) 5, состоящий из формирователя кодов растра (ФКР) 14, формирователя кодов смещения (ФКС) 15, двухканального синтезатора частот (ДСЧ) 16. Кроме этого ЛСТ содержит блок коррекции кодов смещения (БККС) 6, который состоит из видеокамеры объекта (ВО) 7, узла контроля положения объекта (УКПО) 8, видеокамеры цели (ВЦ) 9 и узла контроля положения цели (УКПЦ) 10. Входы управления АОЯ 3 и 4 соединены с выходами ДСЧ 16, входы которого соединены с выходом ФКР 14 и с выходом ФКС 15. Входы ФКС 15 соединены с выходами УКПО 8 и УКПЦ 10, входы которых связаны с выходом ВО 7 и с выходом ВЦ 9 соответственно.
ЛСТ работает следующим образом.
С помощью ВЦ 9 осуществляется поиск цели 12, к которой необходимо доставить управляемый объект 11 и выполняется захват ее изображения. После подачи оператором на ЛСТ команды "Пуск" включается лазер 1, устанавливаются начальные параметры всех блоков и затем осуществляется старт управляемого объекта 11. Далее ВО 7 осуществляется поиск управляемого объекта и фиксирование его изображения. При фиксировании ВО 7 изображения управляемого объекта 11 ФКР 14 начинает вырабатывать коды угловых размеров растра в соответствии с программой управления объектом. Через промежуток времени Δt происходит выведение управляемого объекта 11 в центр ПУО. При этом ФКС 15 формирует коды смещения растра в соответствии с данными, поступающими от УКПО 8 и УКПЦ 10, которые определяют текущие угловые координаты управляемого объекта 11 и угловые координаты цели 12 в соответствии с начальными параметрами, учитывающими угол вылета управляемого объекта. Далее объект управляется в соответствии с данными ФКС 15, который определяет изменение траектории управляемого объекта 11 с учетом всех корректирующих действий, и ФКР 14, который определяет размеры лазерных растров. Коды от ФКР 14 и ФКС 15 поступают на входы ДСЧ 16, который формирует перестраиваемые во времени высокочастотные сигналы fZ и fY, поступающие на АОЯ 3 и 4 соответственно, которые в свою очередь осуществляют отклонение лазерных растров по координатам Z и Y в зависимости от частоты сигналов, что координирует движение управляемого объекта 11 к цели 12.
Так как конструктивно размещение стартовых направляющих управляемого объекта 11 и ВО 7 постоянно, то после подачи команды "Пуск" можно точно определить область появления изображения управляемого объекта 11, что упрощает задачу определения его угловых координат. Так как данная ЛСТ точно определяет угловые координаты управляемого объекта 11, то на начальном участке управления используют лазерные растры небольших размеров, что, в свою очередь, позволяет использовать ВОС 13, работающую на увеличение изображения, что соответственно увеличивает дальность управления объектом.
Введение ВО 7 позволяет также отслеживать окружающую обстановку и осуществлять поиск препятствий, которые могут появляться на пути движения управляемого объекта (пыль, дым, дерево и т.п.). При обнаружении препятствий с помощью ЛСТ осуществляется отклонение траектории движения управляемого объекта 11 с возможностью дальнейшего его выведения на заданную траекторию.
Для более точного определения пространственного положения препятствий может быть использован дальномер, соединенный с ФКС 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОСТОЯННЫХ РАЗМЕРОВ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ В ПЛОСКОСТИ УПРАВЛЯЕМОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093849C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С УВЕЛИЧЕННЫМ ДИАПАЗОНОМ РАБОЧИХ ДАЛЬНОСТЕЙ | 1995 |
|
RU2093848C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2000 |
|
RU2177208C1 |
Изобретение относится к области лазерной техники и используется для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может быть использовано при управлении, посадке и стыковке летательных аппаратов, проводке судов. Технический результат состоит в осуществлении автоматического управления положением лазерных растров управления объектом. Для этого изменение траектории движения управляемого объекта осуществляют путем угловой коррекции поля управления объектом, которое формируют поочередно двумя прямоугольными лазерными растрами, развернутыми относительно друг друга на 90° и образованными за счет сканирования лазерного пучка в каждом растре одной сплошной строкой, при этом формирование сплошной строки осуществляют с помощью двух скрещенных анизотропных акустооптических ячеек, на которые с блока управления дефлекторами подают высокочастотные сигналы с линейной частотной модуляцией, частотный диапазон которых определяет угловые размеры лазерных растров, причем управляемый объект получает информацию о своем пространственном положении относительно центров двух прямоугольных лазерных растров с помощью установленного на нем фотоприемного устройства, при этом используют блок коррекции кодов смещения, с помощью которого выполняют вычисление текущих угловых координат управляемого объекта и угловых координат цели, а также осуществляют отслеживание окружающей обстановки и поиск препятствий, причем угловую коррекцию поля управления объектом осуществляют в соответствии с программой управления объектом, содержащейся в блоке управления дефлекторами, и данными, поступающими в него с блока коррекции кодов смещения. При этом в лазерную систему телеориентации, введен блок коррекции кодов смещения, который состоит из видеокамеры объекта, узла контроля положения объекта, видеокамеры цели и узла контроля положения цели. 2 н. и 2 з.п. ф-лы. 1 ил.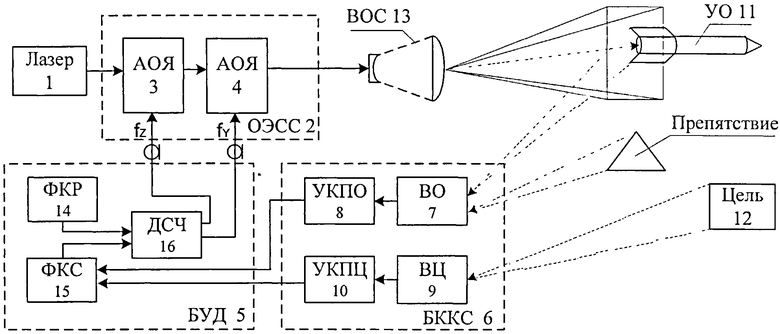
1. Способ лазерной телеориентации объекта, заключающийся в том, что изменение траектории движения управляемого объекта осуществляют путем угловой коррекции поля управления объектом, которое формируют поочередно двумя прямоугольными лазерными растрами, развернутыми относительно друг друга на 90° и образованными за счет сканирования лазерного пучка в каждом растре одной сплошной строкой, при этом формирование сплошной строки осуществляют с помощью двух скрещенных анизотропных акустооптических ячеек, на которые с блока управления дефлекторами подают высокочастотные сигналы с линейной частотной модуляцией, частотный диапазон которых определяет угловые размеры лазерных растров, причем управляемый объект получает информацию о своем пространственном положении относительно центров двух прямоугольных лазерных растров с помощью установленного на нем фотоприемного устройства, отличающийся тем, что используют блок коррекции кодов смещения, с помощью которого выполняют вычисление текущих угловых координат управляемого объекта и угловых координат цели, а также осуществляют отслеживание окружающей обстановки и поиск препятствий, причем угловую коррекцию поля управления объектом осуществляют в соответствии с программой управления объектом, содержащейся в блоке управления дефлекторами, и данными, поступающими в него с блока коррекции кодов смещения.
2. Способ лазерной телеориентации объекта по п.1, отличающийся тем, что для определения пространственного положения препятствий используют дальномер.
3. Лазерная система телеориентации объекта, содержащая лазер, оптико-электронную систему сканирования, состоящую из двух скрещенных анизотропных акустооптических ячеек, выходную оптическую систему, установленные последовательно по ходу излучения, а также блок управления дефлекторами, состоящий из формирователя кодов растра, формирователя кодов смещения и двухканального синтезатора частот, в которой входы управления анизотропных акустооптических ячеек соединены с выходами двухканального синтезатора частот, входы которого соединены с выходом формирователя кодов растра и с выходом формирователя кодов смещения, отличающаяся тем, что входы формирователя кодов смещения соединены с выходами узла контроля положения объекта и узла контроля положения цели, входы которых связаны с выходом видеокамеры объекта и с выходом видеокамеры цели соответственно.
4. Лазерная система телеориентации объекта по п.3, отличающаяся тем, что формирователь кода смещения соединен с дальномером.
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| US 6357694 А, 19.03.2002 | |||
| ГАЗОНАПОЛНЕННЫЙ РАЗРЯДНИК | 2006 |
|
RU2321097C1 |
| US 4676455 А, 30.06.1987. | |||

