Изобретение относится к лазерной технике и предназначено для формирования информационного поля для телеориентации, навигации и оптической связи в системах управления автоматическими подвижными аппаратами. Изобретение может быть использовано при управлении, посадке и стыковке летательных аппаратов, корректировке траектории полета самонаводящихся снарядов и ракет, проводке судов по сложным фарватерам, дистанционном управлении робототехническими устройствами.
Из патентной литературы известны способы формирования информационного поля, основанные на использовании модулирующих растров [1] или на сканировании лазерным лучом с помощью механических колебаний зеркал [2], которые, однако, характеризуются невысоким быстродействием и энергетическим потенциалом, что ограничивает дальность управления.
Более совершенным является способ [3], в котором лазерный пучок совершает возвратно-поступательное сканирование вначале по одной координате с дискретным переходом по ортогональной координате после завершения каждого возвратно-поступательного движения лазерного пучка, а затем после заполнения прямоугольного растра направление сканирования меняют на ортогональное. Выделение координат управляемого объекта в информационном поле лазерной системы телеориентации основано на зависимости от этих координат длительности временного интервала между двумя соседними принимаемыми лазерными сигналами, возникающими при возвратно-поступательном сканировании лазерного пучка.
Однако этот способ требует дополнительных затрат времени при формировании кадра информационного поля из двух взаимно перпендикулярных растров, поскольку между тактами возвратно-поступательного сканирования лазерного пучка по строкам введены временные задержки признака координат, превышающие рабочее время.
Кроме того способ имеет низкую помехозащищенность от случайных помеховых импульсов, которые могут попасть в большие интервалы между выделяемыми импульсами координат, что приводит к сбоям в определении координат управляемого объекта и его возможному срыву с необходимой траектории.
Отмеченные недостатки устранены в способе формирования информационного поля лазерной системы телеориентации, выбранном авторами в качестве прототипа по технической сущности и числу совпадающих признаков [4]. Способ основан на поочередном формировании двух прямоугольных лазерных растров размерами LxL, образованных за счет сканирования лазерного пучка в каждом растре по N строкам и развернутых вокруг общего центра друг относительно друга на 90o. Особенностью способа является формирование строк в растре циклами по M строк в цикле с дискретными переходами лазерного пучка между соседними строками цикла на величину Δ = L/M, а каждую строку формируют за счет не менее трех тактов сканирования с временем сканирования такта Tc и заданными задержками между тактами, причем только два соседних такта в каждой строке имеют встречное направление сканирования и равные времена задержек для первого и второго растров.
По данному способу объект управления получает информацию о своем пространственном положении в виде двух ортогональных координат относительно центра двух последовательно формируемых лазерным пучком растров, образующих кадр. Длительность кадра определяется количеством и длительностью (Tc) тактов сканирования и количеством (N) строк в сумме со всеми задержками (Td1 и Td2), вводимыми между тактами сканирования при формировании каждой строки.
При прямом сканировании, реверсировании сканирования и дублировании последнего лазерный пучок проходит трижды по одной строке, а затем его сдвигают на шаг цикла (L/M) и повторяют операции по этой строке. Этим достигается удаление управляющих сигналов (представляющих собой группы из трех импульсов) по двум соседним строкам растра, что исключает ошибочную идентификацию этих групп и, соответственно, появление ошибочных импульсов управления. Далее формируют следующий цикл, смещая сканирование лазерного пучка на ширину строки относительно первой строки предыдущего цикла, до заполнения растра. Объект управления, находящийся где-либо в пределах информационного поля, при прохождении по нему лазерного луча регистрирует, в результате, по крайней мере по три импульса в каждом растре. При этом, интервал между первым и вторым импульсами зависит от удаления фотоприемного устройства объекта от начала строки, а интервал между вторым и третьим импульсами, независимо от положения объекта, что служит признаком передаваемой координаты.
Блокирование строк в циклы обеспечивает, во-первых, идентификацию регистрируемых групп из трех импульсов за счет того, что интервал между "тройками" импульсов двух соседних строк будет существенно больше допустимых значений интервалов между импульсами внутри каждой группы, а, во-вторых, исключает появление ложных координат при случайном пропуске из импульсов в группах при положении объекта между соседними строками информационного поля.
Принадлежность "троек" к соответствующему растру по координатам X и Y зафиксирована различными значениями временного интервала между вторым тактом сканирования (реверс лазерного пучка) и третьим тактом - дублированием реверса, т.е. временем задержек Td2 по каждой строке, во время которых лазерное излучение погашено.
Однако, известный способ имеет ряд недостатков, снижающих его функциональную надежность.
Частота формирования информационного поля ограничена необходимостью осуществления трех тактов сканирования по каждой строке каждого растра, что снижает мобильность и точность управляющих воздействий по корректировке траектории управляемого объекта. Третий такт сканирования лазерного пучка по каждой строке не несет информации о значениях координат объекта, а содержит лишь признак принадлежности к одному из двух ортогональных растров. Следовательно, определив координатную принадлежность первой "тройки" импульсов по заданной величине задержки Td2, нет необходимости в этой операции по второму растру, так как растры формируются последовательно.
Известный способ имеет недостаточную помехоустойчивость при последовательном переходе сканирования лазерного пучка с одного координатного растра на другой. В случаях, когда объект управления расположен в одном из формируемых при ортогональном переходе сканирования по растрам углов информационного поля, возможно ошибочное совмещение импульсов различных растров в ложную "тройку" по причине сопоставимости интервалов времени между растрами и между импульсами в одном растре, или при случайных пропусках сигналов в импульсной последовательности. При этом идентификация полезных групп импульсов затруднительна или вообще невозможна, так как объект управления, находящийся в информационном поле, работает асинхронно с системой формирования растров и не имеет к ней временной привязки. Ложная команда управления приводит к срыву объекта с заданной траектории.
Учитывая, что растр может быть сформирован небольшим числом строк, площадь участков кадра из последовательно формируемых растров, где помехоустойчивость понижена, составляет заметную долю, что определяет высокую вероятность ложных команд управления объектом.
Задача изобретения - устранение отмеченных недостатков, в результате чего повышается функциональная надежность способа телеориентации.
Требуемый технический результат достигается тем, что в известном способе телеориентации движущихся объектов с помощью информационного поля путем последовательного формирования двух прямоугольных ортогональных растров проточным прямым и встречным реверсивным сканированием лазерного пучка с дублированием реверсивного сканирования, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения, причем строки пошагового сблокирования в циклы, которые поочередно смещают на ширину строки, а шаг выбирают равным протяженности растра, отнесенной к числу строк в цикле, согласно изобретению, по предложению авторов, дублирование реверса лазерного пучка проводят только по первому растру, а после формирования каждого растра выдерживают паузу длительностью не менее
Tc+Td2+Tc/N,
где
Tc - длительность сканирования по строке;
Td2 - задержка после реверсивного сканирования;
N - число строк в растре.
Отличительные признаки в совокупности с известными обеспечивают повышение мобильности телеориентации за счет уменьшения основного времени операций сканирования лазерного пучка при формировании информационного поля, что повышает производительность работ по корректировке траектории движущегося объекта, и повышение функциональной надежности способа, так как предотвращается прохождение ложных команд управления при гарантированной идентификации групп полезных сигналов, возникающих при формировании ортогональных растров.
Дублирование реверса сканирования лазерного пучка (т.е. формирование "тройки" импульсов) только по первому растру позволяет различить одну из двух координат кадра, что автоматически выявляет принадлежность последующих двух полезных сигналов к другому растру сканирования лазерного пучка. Это обеспечивает экономию времени ориентирования объекта по координатам кадра, исключив по второму растру операцию дублирования сканирования.
Для того, чтобы при этом не снизилась помехозащищенность, между растрами установлена временная пауза, заведомо превышающая максимально возможное время между двумя любыми тактами сканирования по строке на время прохождения пучком расстояния, равного ширине строки, что гарантировано обособляет "тройки" и "двойки" импульсов обоих ортогональных растров при любом расположении объекта управления в информационном поле. При этом практически исключается ошибочное группирование импульсов в команду управления.
Каждый из существенных признаков сам по себе известен, но в совокупности создают новизну качества, то есть при этом получается эффект суммы, а не сумма эффектов. Каждый из существенных признаков порознь необходим, а вместе они достаточны для того, чтобы характеризовать изобретение в том качестве, которое проявляется в положительном техническом результате при аппаратурной реализации.
Предложенное изобретение неизвестно из доступных источников информации, явным образом не следует из уровня техники и промышленно применимо для телеориентации движущихся объектов при формировании информационного поля посредством лазерной техники с достижением качественно нового технического результат, то есть соответствует критериям патентоспособности.
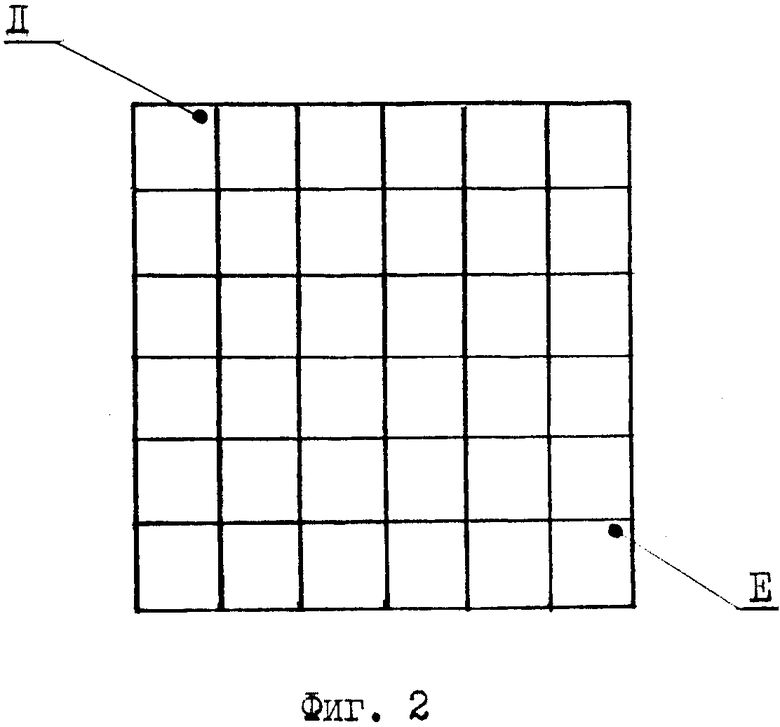
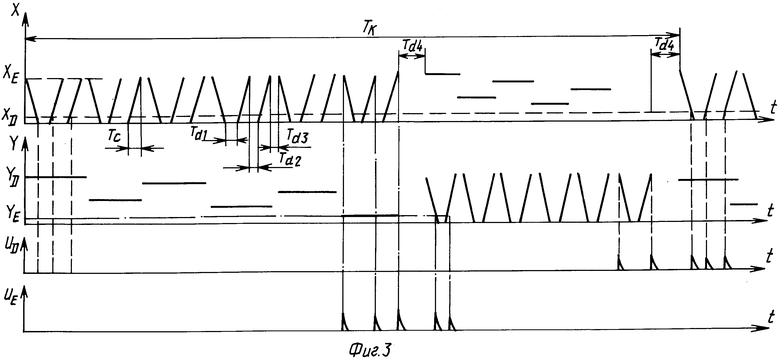
На фиг.1 схематично изображено сканирование лазерного пучка раздельно по растрам (условно), слева по чертежу - по координате X, справа - по координате Y; на фиг.2 - два варианта расположения управляемого объекта: в точках E и D на информационном поле (кадре) в положениях совмещения его растров в пространстве; на фиг. 3 - эпюры координат лазерного пучка при формировании растров с указанными на них пунктиром координатами точек E и D и эпюры импульсов UD и UE, регистрируемых объектом, находящимся в этих точках.
Для сопоставительного анализа численный пример выполнения предложенного способа выполнен с такими же исходными значениями временных интервалов, которые описаны в прототипе: Tc = 100 мкс, Td1 = 10 мкс, Td2 = 10 мкс.
Общеизвестно, что при формировании информационного поля стремятся к уменьшению длительностей всех пауз (задержек), поскольку это способствует повышению частоты формирования кадров и, в конечном итоге, управляемости объекта телеориентации. Поэтому задержки Td1 между прямым и реверсным сканированиями и Td3 при переходе от строки к строке, необходимые, в основном, для гашения луча выбираются минимальными в пределах возможностей аппаратуры, а задержка Td2 между реверсом сканирования и дублированием реверса может быть равна им или принимать большие значения, если это необходимо для передачи на объект управления дополнительной информации (что отмечено и в прототипе).
В соответствии со способом по данному изобретению информационное поле формируют последовательными построчным сканированием лазерного пучка по двум квадратным (LxL) ортогональным растрам, образующим кадр, причем при задержке лазерного пучка между тактами сканирования, строками и растрами излучение гасят.
Управляемый объект получает информацию о своих двух X и Y координатах относительно центра информационного поля.
Длительность тактов сканирования по строкам, а также количество этих тактов и строк в совокупности со всеми вводимыми задержками Тd1 - Td4, определяют длительность кадра Tk.
Лазерный пучок вначале сканируют по координате X (фиг.1), проходя трижды по каждой строке, а затем его смещают на шаг, равный размеру растра L, поделенному на количество строк в цикле M (т.е. при размере растра в зоне нахождения объекта, например, L=10 м и числе строк в цикле M=2 шаг составит 5 м), после чего порядок сканирования повторяется по этой строке цикла.
Далее следующий цикл получают смещением лазерного пучка на его ширину от первой строки предыдущего цикла и повтором трех тактов сканирования вначале по первой строке нового цикла, затем по смещенной от нее на 5 м второй строке.
Таким образом повторяют операции до заполнения растра, которое произойдет, когда общее число строк в нем станет равно N, поскольку ширина пучка, задающая поперечный размер строки, устанавливается (оптическим или электронным путем) равной L/N, т.е. в приведенном примере при N=6 ширина пучка или строки составит около 1,7 м.
Описанный порядок формирования растра обеспечивает разделение "троек" импульсов, зарегистрированных объектом управления дважды в одном растре (в случае расположения его вблизи границы раздела соседних строк) временным интервалом длительностью не менее 3Тc+3Td1+Td2= 345 мкс, что существенно больше допустимых значений интервалов между импульсами внутри "троек", следовательно, обеспечивается надежная их идентификация и исключается смешивание импульсов разных групп.
Интервалы между зарегистрированными фотоприемником управляемого объекта при прохождении по нему лазерного пучка тремя импульсами (фиг.3) в зависимости от удаления от начала строки сканирования могут принимать значения в диапазонах:
между первым и вторым импульсами от Td1 до Td1+2Tс, т.е. 10 - 210 мкс;
между вторым и третьим импульсами - неизменный и независящий от координаты, равный Тd2+Tc=115 мкс.
Таким образом, зарегистрировав группу из трех импульсов с указанными интервалами, объект управления однозначно идентифицирует факт приема X - координаты и определяет численное ее значение.
По завершении формирования первого растра выдерживают паузу Td4 длительностью Tc+Td2+Tc+/N≈132 мкс, после чего лазерным пучком формируют второй растр по координате Y, ортогональный первому растру, аналогичным алгоритмом формирования циклов, но только с двумя тактами сканирования по каждой строке во встречных направлениях (фиг.1 и 3).
В результате объект управления зарегистрирует группу из двух импульсов с интервалом между ними, изменяющимся в пределах от Td1 до Td1+2Tc, равным 10 - 210 мкс в зависимости от Y-координаты, удаленную от группы из трех импульсов, полученных ранее при формировании первого растра, не более, чем на длительность кадра Tk, которая в данном примере составляет около 3,5 мс, что достаточно для идентификации пары импульсов в качестве Y - координаты. Это возможно при последовательном формировании X-, а затем Y-координат, то есть вначале растра с горизонтальным, а затем с вертикальным сканированием лазерного пучка, заложенным в алгоритм формирования информационного поля, аналогично алгоритму идентификации координат объектом управления.
Наличие задержки Td4 длительностью 132 мкс между первым и вторым растрами обеспечивает, при нахождении объекта в любой точке информационного поля, интервал между последним импульсом в группе из трех X-импульсов и первым импульсом в группе из двух Y-импульсов не менее Td2+2Tc=215 мкс (фиг. 3), то есть гарантировано больше, чем предельный интервал между любыми двумя соседними импульсами в любой группе импульсов Х- и Y-растров. Это, в свою очередь обеспечивает надежную и правильную идентификацию определяющих групп импульсов, соответствующих истинным координатам объекта управления в информационном поле.
Что касается ситуации, когда могла бы быть зарегистрирована ложная Y-координата вследствие прихода двух помеховых импульсов, с интервалом между ними, соответствующим возможному интервалу для Y-координат (210 мкс в данном примере), то вероятность такого события столь мала, что не может иметь практического значения. Так, например при пороге срабатывания на уровне 5 - 7 среднеквадратичных значений уровня шума, типичном для систем обнаружения, и ширине полосы пропускания приемного тракта порядка 105 Гц (она определяется длительностью сигнала, которая практически составляет около 10 мкс), вероятность появления пары шумовых импульсов, разделенных интервалом в пределах 210 мкс, не превысит 10-6 (Мирошников М.М. Теоретические основы оптико-электронных приборов. Л.: Машиностроение, 1977, с. 550 - 554).
Аналогично формируется задержка такой же длительности Td4 между Y-растром и следующим за ним X-растром второго кадра (фиг.3)
Таким образом, исключение третьего прохода по каждой строке во втором из двух ортогональных растров не приводит к потере информации о том, какая именно координата передается, а время, затрачиваемое на формирование второго растра, сокращается на ≈30% по сравнению с прототипом. Это существенно повышает кадровую частоту, т.е. частоту получения координатной информации объектом управления, что является одной из важнейших характеристик систем, в которых применяется информационное поле, а именно, повышает мобильность телеориентации и производительность работ.
Дополнительным результатом изобретения является повышение точности ориентации управляемого объекта и, главное, надежное функционирование. Так, давая преимущество по сравнению с известным способом по скорости передачи информации, предложенный способ превосходит его по помехоустойчивости. Действительно, как уже отмечалось выше, введение дополнительной задержки заданной длительности между растрами гарантирует разделение групп импульсов, относящихся к X- и Y-координатам (даже если Y-координата тоже формировалась бы за три прохода по строке), при нахождении объекта в любой точке информационного поля. Такое разделение не только обеспечивает идентификацию координат, но и исключает особенно опасное для управления объекта появление ложных координат, возможное в известном способе при случайном пропуске одного или двух импульсов в регистрируемой последовательности.
Если объект находится в правом нижнем углу информационного поля, в точке E (фиг.2), то он получит последовательность импульсов, показанную на фиг.3, где три импульса регистрируются объектом при формировании первого, X-растра, а два импульса в группе - при формировании Y-растра. При этом, если случайно не будет зарегистрирован, например, первый X-импульс, то два других из этой группы в совокупности с первым Y-импульсом не будут восприняты объектом в качестве "тройки" импульсов (с ложными X-координатами), поскольку интервал вторым и третьим импульсами этой "тройки" за счет введенной задержки Td4 будет не менее, чем: Td4+Tc-Tc/N= 215 мкс, т.е. больше, чем максимальный интервал между любыми двумя соседними импульсами в заданной по способу последовательности импульсов в группах. По этой же причине ложная "тройка" импульсов не образуется из последнего импульса X-группы и двух следующих за ним Y-импульсов при случайном пропуске первых двух Х-импульсов. Следовательно, любая неполная группа Х-импульсов будет воспринята как помеха и ложная команда управления при этом не вырабатывается.
Аналогично описанному объект, находящийся в точке D растра (фиг.2), зарегистрирует последовательность импульсов (фиг.3), где первые два импульса относятся к Y-растру, а следующая за ним "тройка" импульсов - к X-растру следующего кадра.
Смешение соседних импульсов смежных растров в ложные группы "двоек" или "троек" не может быть по причине введенной задержки Тd4 между растрами, обеспечивающей увеличение интервала между соседними импульсами различных групп до уровня, превосходящего допустимые значения интервалов внутри групп.
Во всех перечисленных выше ситуациях способ формирования растра, заявленный в прототипе, привел бы к появлению ложных координат. Что касается случайной регистрации помеховых импульсов, возможной в реальных условиях воздействия шумов и помех, то и здесь предлагаемый способ несколько более устойчив, поскольку к потере информации будут приводить практически лишь те помеховые импульсы, которые окажутся внутри какой-либо группы импульсов, а в предлагаемом способе длительность Y-группы из двух импульсов, естественно, в полтора-два раза меньше длительности соответствующих Y-групп в прототипе, а значит вероятность попадания помехи в этот более короткий интервал тоже меньше.
Изобретение обеспечивает селекцию полезных сигналов по двум ортогональным координатам при увеличенной частоте формирования лазерной системой кадров информационного поля, что повышает точность ориентации движущегося объекта и функциональную надежность управления и корректирования его траектории.
Источники информации.
1. Патент США N 4111385, F 42 B 13/30.
2. Авторское свидетельство N 558247, G 02 F 1/29.
3. Патент Великобритании N 8330302, опубликован 24.07.84, F 41 G 7/00, G 01 S 1/70.
4. Заявка на патент РФ N 94025334, G 01 S 1/70, опубл.20.04.94 г., Бюл. N 11 (RU 2080615, 27.05.97).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2012 |
|
RU2486543C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| Способ телеориентации движущихся объектов | 2015 |
|
RU2614333C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОСТОЯННЫХ РАЗМЕРОВ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ В ПЛОСКОСТИ УПРАВЛЯЕМОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093849C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2011 |
|
RU2477866C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2013 |
|
RU2537662C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С УВЕЛИЧЕННЫМ ДИАПАЗОНОМ РАБОЧИХ ДАЛЬНОСТЕЙ | 1995 |
|
RU2093848C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
Изобретение относится к лазерной технике и предназначено для формирования информационного поля систем телеуправления подвижными объектами. Достигаемый технический результат - повышение мобильности телеориентации за счет уменьшения основного времени операций сканирования лазерного луча при формировании информационного поля. Способ основан на последовательном формировании двух прямоугольных ортогональных растворов построчным прямым и встречным сканированием лазерного луча с дублированием реверса, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения. Строки пошагово сблокированы в циклы, которые поочередно смещают на ширину строки, а шаг выбирают равным протяженности растра, отнесенной к числу строк в цикле, причем дублирование реверса лазерного луча производят по первому растру, а между растрами устанавливают временную паузу. 3 ил.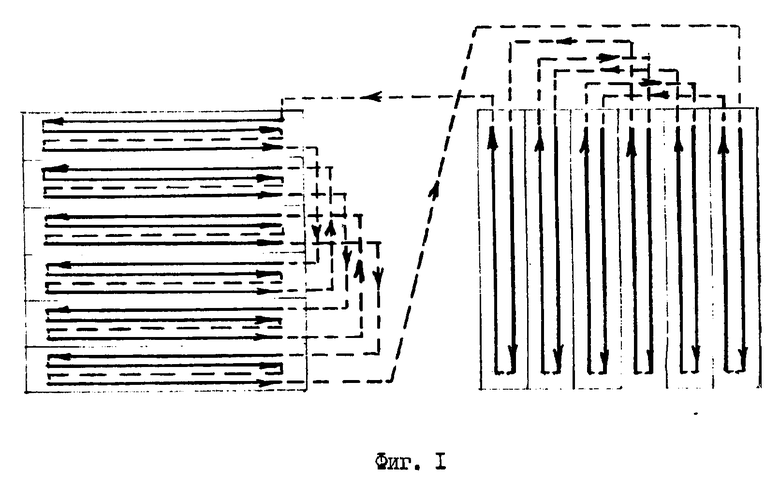
Способ телеориентации движущихся объектов с помощью информационного поля путем последовательного формирования двух прямоугольных ортогональных растров построчным прямым и встречным реверсивным сканированием лазерного пучка с дублированием реверсивного сканирования, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения, причем строки пошагово сблокированы в циклы, которые поочередно смещают на ширину сроки, а шаг выбирают равным протяженности растра, отнесенной к числу строк в цикле, отличающийся тем, что дублирование реверса лазерного пуска проводят только по первому растру, а после формирования каждого растра выдерживают паузу длительностью не менее
Tс + Td2 + Tс/N,
где Tс - длительность сканирования по строке;
Td2 - задержка после реверсивного сканирования;
N - число строк в растре.
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| Световой дефлектор | 1975 |
|
SU558247A1 |
| US 4111385 A, 05.09.78 | |||
| СПОСОБ ПОЛУЧЕНИЯ НАПЛАВЛЕННОГО НА ИЗДЕЛИЕ ПОКРЫТИЯ | 1998 |
|
RU2133652C1 |

