Изобретение относится к способам регулирования прочностных и иных физических характеристик механических конструкций и может быть использовано для защиты конструкций в строительстве, машиностроении и других отраслях техники.
Известен способ для активного управления [1] заключающийся в предотвращении возможности возникновения вибраций в какой-либо зоне длинного звена под действием источника вибраций, воздействующего непосредственно и опосредованно на другую зону этого длинного звена, при этом концы, по меньшей мере, одного конструктивного элемента закрепляют на длинном звене в точках, разнесенных по его длине таким образом, что конструктивный элемент или каждый конструктивный элемент может вызвать только малые деформации участка длинного звена между точками закрепления, на конструктивные элементы подают сигналы управления так, что имеет место в значительной мере подавление нежелательных перемещений длинного звена с одной стороны от конструктивного элемента, передаваемых на другую сторону.
Недостатком этого способа является то, что невозможно указанным путем воздействовать на прочностные или иные физические характеристики конструкции в целом, в этом способе не создается таких входных воздействий, которые могли бы быть использованы как управление собственными свойствами и поведением конструкции в целом, способ позволяет демпфировать вибрации, но не может противодействовать нагрузкам, меняющимся не по периодическим законам.
Известен способ активного управления [2] в котором в соответствии с заданием производят такое размещение и управление действующим в одном направлении несколькими инерционными исполнительными органами, что они создают силы, воздействующие на точку или малую зону протяженной механической конструкции таким образом, что происходит изменение или гашение вызываемых вибрациями смещений в указанной точке или в малой зоне.
Но такой способ ориентирован также на противодействие вибрации в точке или малой зоне конструкции, он не меняет прочностных и иных собственных свойств (собственных временных и пространственных частот и мод) и не может служить средством воздействия на пространственно-протяженные объекты и не позволяет противостоять увеличениям нагрузок, регулируя жесткость на изгиб, изменять резонансные частоты, критическую силу сжатия.
Наиболее близким по технической сущности является способ [3] заключающийся в использовании одного или нескольких воздействующих на пространственно-протяженную конструкцию элементов, представляющих собой также пространственно-протяженные конструкции, которые размещают вдоль основной конструкции, соединяют с ней хотя бы в одной точке и натягивают.
После создания предварительных напряжений и после заделок такая монолитная конструкция обладает внутренней, но фиксированной структурой, в ней отсутствуют (утрачиваются) степени свободы, которые могли бы быть использованы как изменяемые во времени регулирующие либо управляющие воздействия. Как следствие, в известном способе исключены возможности организации путем надлежащего снижения и повышения натяжения характеристиками и состоянием протяженной конструкции, организации меняющейся (и каждый раз новой) реактивной динамики, т. е. обратной связи с заранее задаваемыми характеристиками регулирования.
Технический результат изобретения возможность поддержания во времени изменений по заданному закону той или иной величины (поддержания требуемого режима), возможность перевода соответствующей системы из некоторого одного состояния (или одного множества характеристик) в желаемое другое.
Указанный технический результат достигается тем, что в способе управления характеристиками пространственно-протяженной конструкции, заключающемся в использовании одного или нескольких воздействующих на нее элементов, представляющих собой также пространственно-протяженные конструкции, которые размещают вдоль основной конструкции, соединяют с ней и натягивают, хотя бы один из концов этих элементов оставляют свободным и используют его для создания дополнительного воздействия путем изменяемого во времени натяжения с обеспечением направленного изменения характеристик и состояния основной конструкции в соответствии с налагаемыми требованиями в пределах сохранения работоспособности.
На фиг. 1 представлена разновидность пространственно-протяженной конструкции в виде тонкого вертикального стержня.
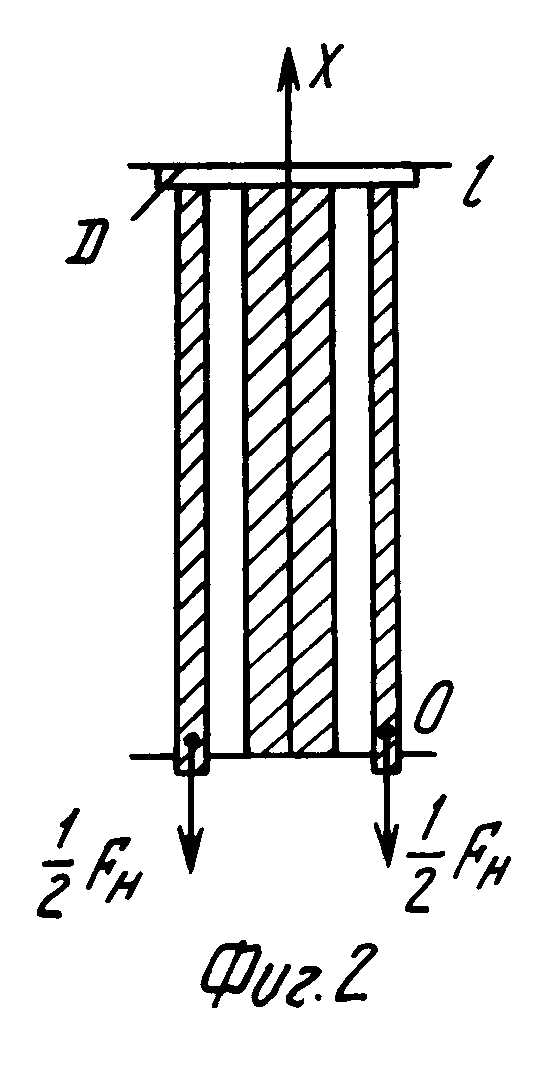
На фиг. 2 показан вариант вертикальной пространственной конструкции с воздействующими элементами.
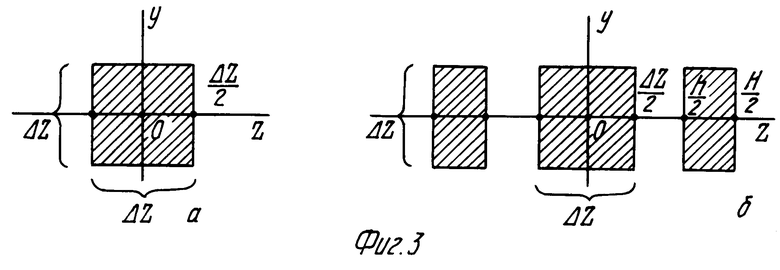
На фиг. 3 изображены поперечные сечения основной конструкции (а) и системы в целом (б).
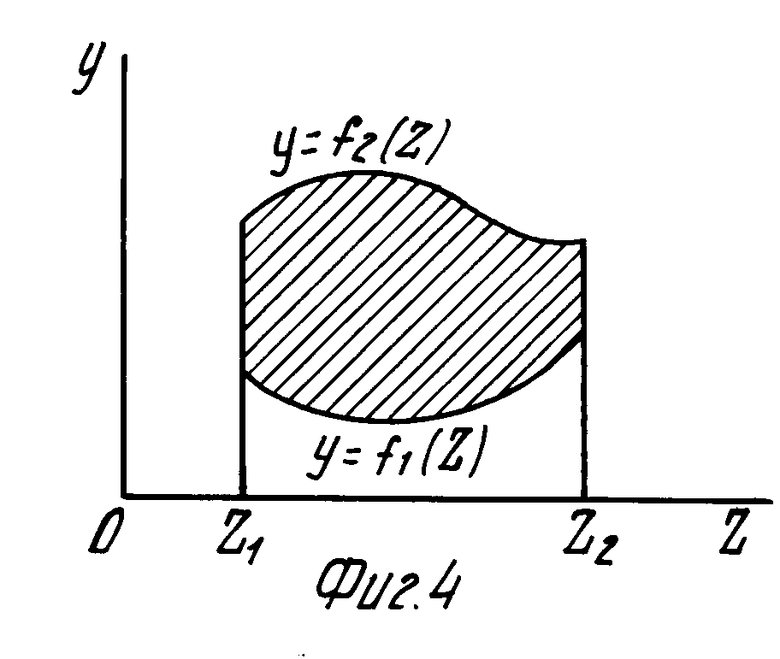
На фиг. 4 изображена площадь сечения произвольной формы.
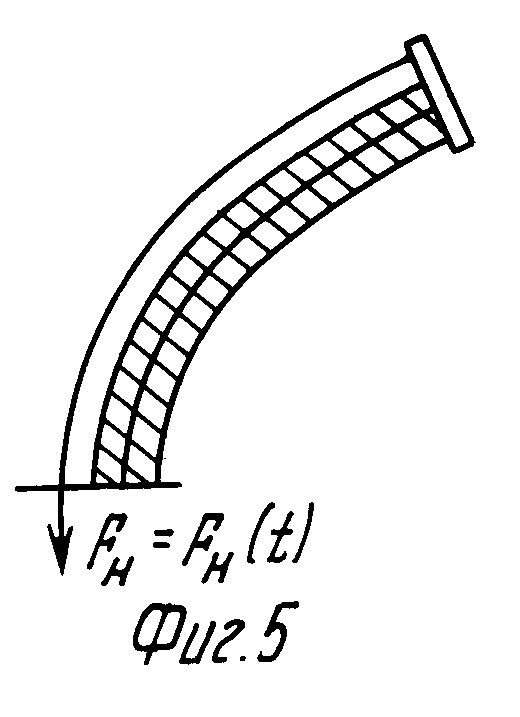
На фиг. 5 изображен пример реализации способа, когда система представлена в виде изогнутого стержня с тросом.
Пусть элемент конструкции (фиг. 1) испытывает периодическое внешнее (вынуждающее) силовое воздействие с некоторой частотой, причем эта частота может принимать различные значения. Если частота внешнего воздействия совпадает с одной из собственных частот, то может возникнуть явление нежелательного (или даже разрушительного) резонанса. Применяя последовательность операций, заявленную в способе, и используя полученную в результате степень свободы, мы можем создавать надлежащее натяжение свободных концов тросов (фиг. 2). Тем самым мы изменяем (сдвигаем) собственные частоты элемента конструкции (который совместно с тросами может рассматриваться как новый элемент) и уходим от опасности резонанса. Но если частота вынужденного воздействия приняла новое значение, то ситуация может повториться, и нам придется дать новое натяжение тросам. Мы приходим к тому, что в ситуациях, подобных рассмотренной, может возникнуть необходимость в неоднократном воздействии на собственные частоты путем неоднократного изменения натяжения тросов. В зависимости от целей может потребоваться и непрерывное изменение натяжения. Это пример использования создаваемых в способе степеней свободы для управления собственными (внутренними) свойствами объекта, т.е. управления его характеристиками.
В качестве следующего примера рассмотрим продольные колебания вертикально расположенного прямолинейного стержня (фиг. 1). Такие колебания, как известно, описываются уравнением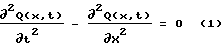
с краевыми условиями
Пусть в начальный момент времени стержень в результате сотрясения, удара или иной причины оказался в некотором возмущенном состоянии
(в (1) (3) Q Q(x, t) продольное смещение точек стержня с координатой x в момент времени t, 0≅x≅l, l длина невозмущенного стержня, 0 < t < ∞, ось Ox направлена здесь по вертикали). Предоставленный сам себе такой стержень может успокаиваться довольно долго, например, до тех пор, пока энергия начального возмущения не растратится на преодоление сил внутреннего трения.
Допустим, требуется сколько возможно уменьшить это время. Осуществим последовательность действий, заявленную в способе, и полученную в результате степень свободы возможность изменений во времени натяжений канатов (фиг. 2) будем на этот раз использовать в качестве программного (терминального) управления. Конкретно это управление применим для целей успокоения стержня за много меньшее время, точнее за минимально возможное. Это управление состоянием. Условия (2) заменяются при этом на
Q(O, t) 0, Q (l, t) U(t),
где U(t) управление меняющееся во времени натяжение тросов (канатов).
Пусть верхний конец изогнутого элемента конструкции (фиг. 5) находится под действием силовой нагрузки, направленной вертикально вниз и изменяющейся во времени со значительной амплитудой, причем задача состоит не только в удержании такой нагрузки, но еще и в том, чтобы этот конец, не будучи закрепленным, тем не менее, не совершал бы вертикальных смещений, оставаясь все время на некоторой заданной отметке. Применяя заявленную последовательность операций и меняя с ходом времени натяжение троса соответственно изменениям нагрузки, мы может обеспечить необходимую стабилизацию, реализуя тем самым решение данной задачи. Это пример использования приобретений в заявленном способе степени свободы для целей регулирования (или организации авторегулирования с заданными качествами).
Предлагаемый способ в простейшем виде состоит в использовании, например, троса, повторяющего изгиб стержня и соответствующим образом натянутого, трос может проходить внутри трубы или колец, и надлежащее его натяжение может регулироваться нужным поворотом простого нарезного устройства.
Таким образом, предлагаемое техническое решение позволяет изменять в соответствии с выбранным режимом управление защитными воздействиями на пространственно-протяженные механические конструкции. Данное решение может быть использовано в строительстве при проектировании высокоответственных конструкций зданий и сооружений, расположенных как в обычных условиях, так и в условиях повышенной сейсмостойкости, в зонах риска и при строительстве объектов защиты окружающей среды, атомной энергетики, гидротехнических сооружений.
Использование: для защиты конструкций в строительстве, машиностроении и других отраслях техники. Сущность изобретения: в способе управления характеристиками пространственно-протяженной конструкции, заключающемся в использовании для этого одного или нескольких воздействующих на нее элементов, в качестве таковых элементов используют также пространственно-протяженные конструкции, размещают их вдоль основной конструкции, соединяют их с ней хотя бы в одной точке и свободные концы этих элементов натягивают таким образом, что происходят направленные изменения внутренних свойств и образуются дополнительные входные воздействия, которые могут быть использованы как управляющие путем изменения этих натяжений в соответствии с требуемым режимом в пределах сохранения работоспособности. 5 ил.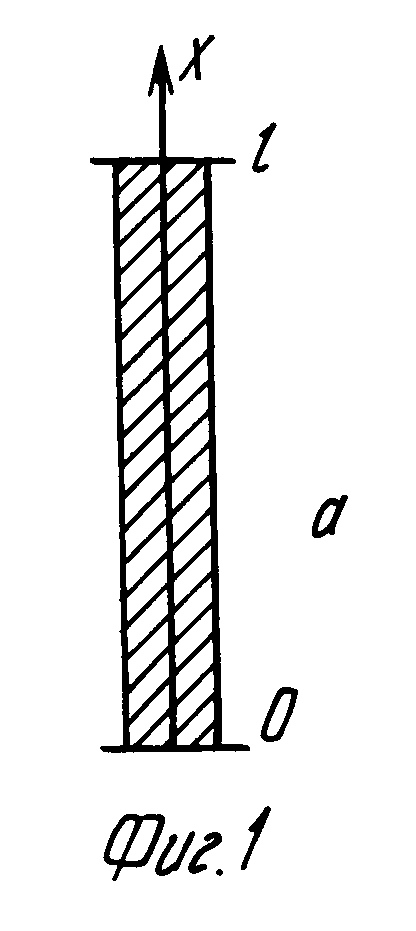
Способ управления характеристиками пространственно-протяженной конструкции, заключающийся в использовании одного или нескольких воздействующих на нее элементов, представляющих собой также пространственно-протяженные конструкции, которые размещают вдоль основной конструкции, соединяют с ней хотя бы в одной точке и натягивают, отличающийся тем, что хотя бы один из концов этих элементов оставляет свободным и используют его для создания дополнительного воздействия путем изменяемого во времени натяжения с обеспечением направленного изменения характеристик и состояния основной конструкции в соответствии с налагаемыми требованиями в пределах сохранения работоспособности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ N 4008568, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ N 4007442, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Останкинская телевизионная башня /Под ред | |||
| Н.В.Никитина | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
