Изобретение относится к авиации и космонавтике и предназначено для применения на парашютах с обеспечением управления направлением и скоростью движения.
Известно устройство для дистанционного управления планирующим парашютом, содержащее радиопередатчик, находящийся на земле у оператора, а в конструкцию спускаемого аппарата встроен двухканальный радиоприемник с блоком питания, электрически соединенный с двумя исполнительными механизмами, содержащими последовательно соединенные электромотор, редуктор и барабан, на который наматывается стропа управления парашютом. (Автоматическая система точной доставки груза по воздуху. Проспект фирмы "Пара-Пойнт", 1985).
Недостатком этого устройства является достаточно большой вес и габариты, а также трудности, часто и невозможность его использования на уже имеющихся спускаемых аппаратах, так как необходимо иметь соответствующий объем и проводить серьезные изменения в конструкции последнего.
Наиболее близким по технической сущности к предлагаемому является устройство для дистанционного управления планирующим парашютом, содержащее радиопередатчик, находящийся на земле у оператора, двухканальный радиоприемник с блоком питания, электрически соединенный с двумя исполнительными механизмами, содержащими последовательно соединенные электромотор, редуктор и барабан, на который наматывается стропа управления парашютом, помещены в отдельный корпус, который закреплен между спускаемым аппаратом и парашютом (Возвращение аэрокосмических грузов при снижении с больших высот с помощью автоматически управляемого парашюта. Проспект фирмы "Пара-Поинт", 1985).
Это устройство, в отличие от аналога, не требует дополнительных объемов и внесения изменения в конструкцию самого спускаемого аппарата, но имеет достаточно большой вес, габариты и ухудшает динамику выпуска парашюта, так как появляется дополнительное звено в связке груз-парашют.
Технической задачей изобретения является уменьшение веса и габаритов исполнительных механизмов, а также исключение дополнительного звена в связке груз-парашют, которое имеется в известном устройстве.
Технический результат достигается тем, что в устройстве для дистанционного управления планирующим парашютом, содержащим радиопередатчик, находящийся на земле у оператора, а на обоих несущих ремнях подвески планирующего парашюта, ближе к тому месту, где сходятся нижние концы строп, дополнительно закреплено по исполнительному механизму, каждый из которых содержит последовательно соединенные электромотор, редуктор и два ролика с полукруглыми канавками и резиновым покрытием, заключен в силовой корпус и электрически соединен с двухканальным радиоприемником и блоком питания, размещенным в корпусе спускаемого аппарата. Через ролики пропущена стропа управления, причем для увеличения тянущего усилия она делает по обороту вокруг каждого ролика, а ее конец выведен из корпуса наружу. Для того чтобы свободно висящий конец стропы управления не запутывался, а также для обеспечения требуемого натяжения, в конце стропы закреплен грузик, который, кроме того, не позволяет стропе полностью выйти из исполнительного механизма.
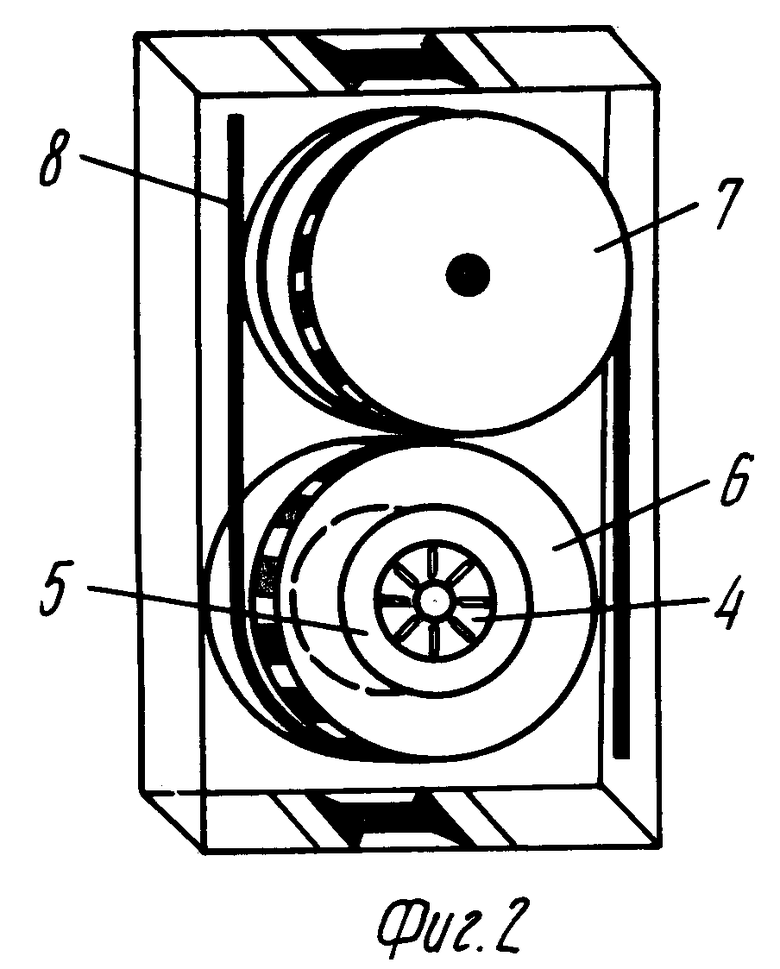
На фиг. 1 изображена схема крепления исполнительных механизмов на парашюте; на фиг. 2 конструкция исполнительного механизма.
Устройство для дистанционного управления планирующим парашютом содержит двухканальный радиоприемник 1 с блоком питания 2 и два одинаковых исполнительных механизма, каждый из которых содержит силовой корпус 3, электромотор 4, редуктор 5 и два обрезиненных ролика 6 и 7, вокруг которых стропа управления 8 делает по одному витку, а на ее свободном конце закреплен грузик 9. Вращающийся момент с редуктора на ролики передается с помощью зубчатого зацепления, поэтому направление вращения роликов противоположное, соответственно и направление витков стропы управления на одном ролике противоположно другому.
Работает устройство следующим образом.
Корпуса 3 исполнительных механизмов закреплены на левом и правом несущем ремне подвески (фиг. 1). При приеме радиоприемником 1 одной из двух команд с земли (разворот влево или разворот вправо) он коммутирует соответствующие электромоторы постоянного тока 4 с блоком питания 2 так, что в конечном итоге обеспечивается противоположное движение двух строп управления 8 (одна вверх, другая вниз).
Вращение с электромотора 4 на ролик 6 передается с помощью редуктора 5, на котором угловая скорость вращения снижается, а крутящий момент увеличивается до необходимой величины. Вращение на ролик 7 передается с ролика 6 с помощью зубчатого зацепления, которое нарезано по краям обоих роликов. Ролики 6 и 7 имеют одинаковые размеры, поэтому угловая скорость у них одинаковая по величине, но противоположная по направлению. Так как вокруг роликов 6 и 7 сделано по витку стропы управления 8, то она придет в соответствующее движение (вверх или вниз). Свободный конец стропы 8 натянут с помощью грузика 9, что не позволит ей запутаться и служит одновременно ограничителем движения стропы вверх. Стропа управления закреплена на задней кромке планирующего парашюта и искривляет его геометрию, в результате чего изменяется направление полета.
Таким образом, предлагаемое устройство для дистанционного управления планирующим парашютом имеет малый вес и габариты, так как отсутствует самый громоздкий элемент конструкции барабан, на который наматывается стропа управления. Малый вес и габариты устройства позволили закрепить его на несущих ремных подвески, а значит, исключить появление дополнительного звена в связке груз-парашют, что положительно сказывается на динамике выпуска системы спасения. Кроме этого, появляется возможность использовать устройство на уже имеющихся парашютах практических без внесения изменений как в конструкцию парашюта, так и в конструкцию груза, что особенно актуально для использования их в системе спасения уже имеющихся беспилотных летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная прецизионная система доставки груза по воздуху | 2021 |
|
RU2775656C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПАРАПЛАНОМ | 1993 |
|
RU2078368C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| УПРАВЛЯЕМАЯ ПАРАПЛАННАЯ СИСТЕМА | 2008 |
|
RU2378160C1 |
| АВТОМАТИЗИРОВАННАЯ ПАРАШЮТНАЯ СИСТЕМА ДОСТАВКИ ГРУЗОВ | 2021 |
|
RU2761675C1 |
| Подвесной отстыковывающийся авиаконтейнер с управляемой парашютной системой | 2021 |
|
RU2758620C1 |
| СТЕНД-ТРЕНАЖЕР ВОДОЛАЗА | 1993 |
|
RU2094300C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1993 |
|
RU2054635C1 |
| СПОСОБ И УСТРОЙСТВО ОТБОРА ПРОБ ВОЗДУХА ДЛЯ ПОСЛЕДУЮЩЕГО АНАЛИЗА ГАЗООБРАЗНЫХ ИЛИ АЭРОЗОЛЬНЫХ ПРИМЕСЕЙ | 2004 |
|
RU2298776C2 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ СПИРАЛЕЙ | 1993 |
|
RU2077404C1 |
Изобретение относится к авиационной технике. Сущность изобретения: устройство содержит радиопередатчик, находящийся на земле у оператора, а двухканальный радиоприемник с блоком питания размещен в корпусе спускаемого аппарата и электрически соединен с двумя миниатюрными исполнительными механизмами, закрепленными непосредственно на парашюте. Каждый из исполнительных механизмов содержит электродвигатель с редуктором и два обрезиненных ролика с полукруглыми канавками. Вокруг роликов сделано по витку стропы управления, свободный конец которой выведен из корпуса и свисает под натяжением концевого грузика. 1 з.п. ф-лы, 2 ил.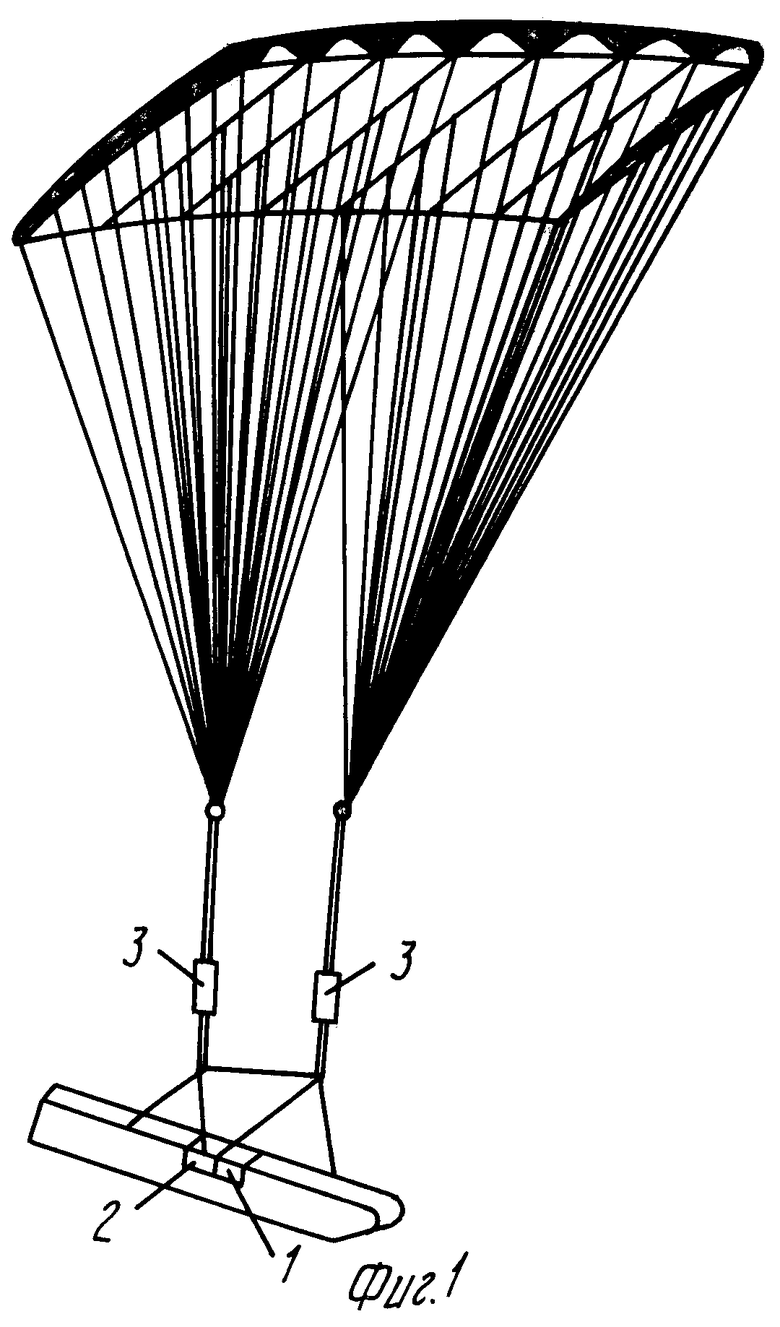
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматическая система точной доставки груза по воздуху | |||
| Проспект фирмы "Пара-Пойнт" | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Возвращение аэрокосмических грузов при снижении с больших высот с помощью автоматически управляемого парашюта | |||
| Проспект фирмы "Пара-пойнт" | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
