Изобретение относится к области измерений, автоматической записи и обработки результатов наблюдений при стендовых и полигонных испытаниях различных специальных устройств (например, артиллерийских орудий).
Известны способ и устройство для определения истинного угла вылета снаряда из артиллерийского орудия. Способ позволяет определять отдельно поперечную скорость дульного среза (воздействующего на снаряд при вылете) и угол отклонения дульного среза по отношению к оси канала ствола.
Под "углом вылета" подразумевается разность между начальной осевой линией трубы и осевой линией изделия после выхода изделия из трубы β За счет движения изделия в трубе последняя вибрирует и в момент вылета (потери связи с трубой) изделие получает дополнительную по отношению к осевой скорость в поперечном направлении. Сложение двух векторов скоростей (V0 и Vt) дает дополнительное изменение угла вылета на величину g Алгебраическая сумма двух указанных углов и считывается истинным углом вылета.
Геометрическая интерпретация того, что происходит у дульного среза в момент вылета снаряда, представлена на фиг. 1, где приняты следующие обозначения:
v угол возвышения орудийного ствола в момент прицеливания (перед выстрелом);
b угол, на который отклоняется осевая линия снаряда от оси канал ствола в момент его вылета (т.е. в момент потери связи со стволом) или угол отклонения среза трубы от начальной осевой линии;
V0 начальная скорость снаряда в момент вылета;
Vt скорость движения (из-за вибрации) дульного среза;
g = arctgvt/vo≈ vt/vo дополнительный угол вылета;
α = β+γ истинный угол вылета, измерению которого служит изобретение.
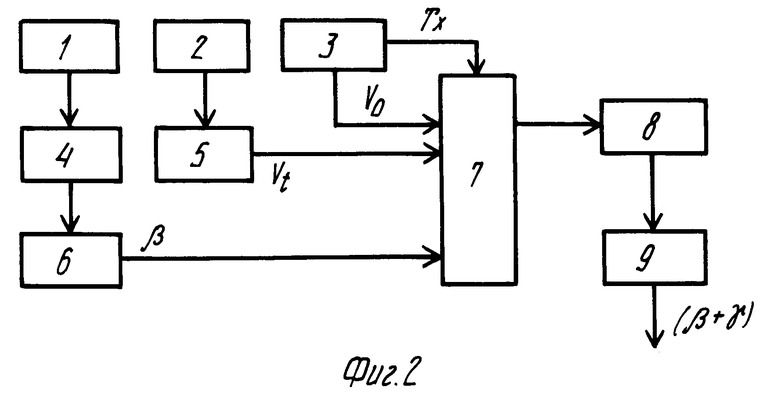
На фиг. 2 изображена блок-схема предлагаемого устройства.
Способ, описанный в упомянутом французском патенте, характеризуется следующими признаками:
на фотопленку записывают 1-й луч, отраженный рядом с дульным срезом и отклоненный угловым смещением (т.е. b(t) ), которое совершает дульный срез во время стрельбы;
на фотопленку записывают (фиксируют) 2-й луч, который проходит перпендикулярно дульному срезу и прерывается снарядом при вылете;
на фотопленку записывают 3-й луч, дающий рефракционное изображение при прохождении через оптическую щель, расположенную перпендикулярно плоскости вибраций дульного среза (т.е. линейные отклонения S(t);
фиксируют на пленке хронологические метки.
В результате измерений на пленке фиксируется функции β(t) и S(t) от момента начала движения снаряда до его вылета. Далее при ручной обработке графиков получают Vt S (путем измерения угла наклона касательной линии к графику S(t) в соответствующей точке).
Очевидными недостатками прототипа являются следующие:
величина β может быть определена непосредственно только путем визуального считывания с фотопленки;
величина Vt может быть получена после ручной обработки записи на фотопленке;
величина V0 не измеряется и считается известной;
дополнительный угол g получается путем расчета (с использованием величин Vt и V0, известных с низкой точностью).
Целью предлагаемого способа является автоматизация и повышение точности измерения истинного угла вылета (β+γ) которая достигается тем, что измеряют скорость изделия (снаряда) у среза трубы (V0) и фиксируют момент потери связи изделия с трубой (Tx). Непрерывно до момента Tx измеряют ускорение  трубы в вертикальной плоскости и после интегрирования его формируют сигнал скорости трубы (Vt). Также непрерывно измеряют угловое ускорение
трубы в вертикальной плоскости и после интегрирования его формируют сигнал скорости трубы (Vt). Также непрерывно измеряют угловое ускорение  среза трубы в вертикальной плоскости и после его двойного интегрирования формируют сигнал угла (β) отклонения среза трубы от начальной осевой линии канала трубы. В момент (Tx) же потери связи изделия с трубой сигналы β Vt и V0 последовательно коммутируют и преобразуют с помощью аналого-цифрового преобразователя (АЦП) в кодовые импульсные последовательности, из которых с помощью цифрового вычислителя (ЦВ) формируют сигнал истинного угла вылета (β+γ) изделия из трубы.
среза трубы в вертикальной плоскости и после его двойного интегрирования формируют сигнал угла (β) отклонения среза трубы от начальной осевой линии канала трубы. В момент (Tx) же потери связи изделия с трубой сигналы β Vt и V0 последовательно коммутируют и преобразуют с помощью аналого-цифрового преобразователя (АЦП) в кодовые импульсные последовательности, из которых с помощью цифрового вычислителя (ЦВ) формируют сигнал истинного угла вылета (β+γ) изделия из трубы.
Для реализации предложенного способа используется устройство, содержащее коммутатор (Km), к информационным входам которого подсоединены:
последовательно соединенные акселерометр  с двумя интеграторами;
с двумя интеграторами;
последовательно соединенные акселерометр  с интегратором и измеритель скорости изделия (V0) у среза трубы, который содержит измеритель временного интервала и две индукционные катушки, одна из которых, находящаяся непосредственно у среза трубы, одновременно выполняет функции блока фиксирования момента потери связи изделия с объектом (вырабатывает сигнал Tx).
с интегратором и измеритель скорости изделия (V0) у среза трубы, который содержит измеритель временного интервала и две индукционные катушки, одна из которых, находящаяся непосредственно у среза трубы, одновременно выполняет функции блока фиксирования момента потери связи изделия с объектом (вырабатывает сигнал Tx).
Блок-схема устройства содержит следующие блоки: 1 акселерометр для измерения  2 акселерометр для измерения
2 акселерометр для измерения  3 измеритель начальной скорости изделия V0; 4, 5, 6 интеграторы; 7 коммутатор; 8 - аналого-цифровой преобразователь (АЦП); 9 цифровой вычислитель.
3 измеритель начальной скорости изделия V0; 4, 5, 6 интеграторы; 7 коммутатор; 8 - аналого-цифровой преобразователь (АЦП); 9 цифровой вычислитель.
Устройство работает следующим образом. В процессе движения изделия в трубе осуществляется непрерывное измерение ускорений с помощью акселерометров 1 и 2, которые интегрируются и на выходе интегратора 5 формируется сигнал Vt, а на выходе интегратора 6 сигнал β Измеритель начальной скорости V0 содержит две индукционные катушки на расстоянии l друг от друга, соединенные механически и укрепленные на трубе таким образом, что одна из них находится у среза трубы. При прохождении изделия через первую катушку в ней формируется импульс, задний фронт которого и является сигналом схода (Tx). При прохождении второй катушки в ней также формируется импульс. Измеритель временного интервала, входящий в состав блока 3, производит измерение времени между импульсами и формирует значение сигнала V0 (с учетом базы l между катушками). По сигналу схода Tx коммутатор 7 начинает последовательную передачу сигналов b Vt и V0 и передачу их через АЦП в цифровой вычислитель. Последний по заданной программе проводит обработку полученных сигналов и вырабатывает значение истинного угла вылета (β+γ) с высокой точностью.
Поскольку здесь представлена блок-схема устройства, подразумевается, что при конкретной реализации устройство должно содержать источники питания и цепи управления. При этом организация работы устройства может содержать возможность хранения и выдачи сигналов на любое другое устройство, а также возможность многократного считывания и преобразования сигналов β Vt и V0 и обработки их по любой заданной программе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО УГЛА ВЫЛЕТА БОЕПРИПАСА ИЗ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2092771C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 1994 |
|
RU2092764C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОРУДИЯ ЗЕНИТНОЙ АРТИЛЛЕРИИ | 1994 |
|
RU2092765C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
Использование: военная техника, в частности область измерений, автоматической записи и обработки результатов стендовых испытаний артиллерийских орудий. Сущность изобретения: осуществляется автоматическое измерение скорости изделия; линейное ускорение среза трубы с последующим двукратным интегрированием; угловое ускорение с последующим интегрированием; коммутация и преобразование сигналов в импульсные кодовые последовательности, которые затем обрабатываются цифровым вычислителем с высокой точностью. Изобретение обеспечивает высокую степень автоматизации и высокую точность измерений. 2 с. и 1 з.п. ф-лы, 2 ил.
 среза трубы в вертикальной плоскости и после интегрирования его формируют сигнал скорости среза трубы vt, измеряют угловое ускорение
среза трубы в вертикальной плоскости и после интегрирования его формируют сигнал скорости среза трубы vt, измеряют угловое ускорение  среза трубы в вертикальной плоскости и после его двойного интегрирования формируют сигнал угла b отклонения среза трубы от начальной осевой линии канала, а в момент потери связи изделия с трубой сигналы vo,vt и β последовательно коммутируют и преобразуют с помощью аналого-цифрового преобразователя в кодовые импульсные последовательности, из которых с помощью цифрового вычислителя формируют сигнал истинного угла вылета изделия из трубы относительно начальной осевой линии канала трубы.
среза трубы в вертикальной плоскости и после его двойного интегрирования формируют сигнал угла b отклонения среза трубы от начальной осевой линии канала, а в момент потери связи изделия с трубой сигналы vo,vt и β последовательно коммутируют и преобразуют с помощью аналого-цифрового преобразователя в кодовые импульсные последовательности, из которых с помощью цифрового вычислителя формируют сигнал истинного угла вылета изделия из трубы относительно начальной осевой линии канала трубы.
| FR, патент, 2011026, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
