Известно устройство радиолокационного распознавания объектов по амплитудно-модулированным эхо-сигналам [1, с. 36 - 37, рис. 2.2]. Действие устройства основано на том, что отражающие поверхности летательных аппаратов при своем нормальном функционировании совершают колебательные движения, обусловленные работой двигателей. Эти колебания воздействуют на зондирующие импульсы РЛС, и фаза рассеянных сигналов изменяется в соответствии с частотой колебаний распознаваемого объекта. Устройство включает антенну, антенный переключатель, приемник, передатчик, индикатор кругового обзора (ИКО) и канал распознавания, состоящий из линии задержки (ЛЗ), 2-го ключа, смесителя, фильтра нижних частот (ФНЧ) и устройства воспроизведения обзора цели, передатчик состоит из модулятора, генератора сверхвысокой частоты (СВЧ) и 1-го ключа. В описанном устройстве антенна через антенный переключатель соединяется со входом приемника и выходом 1-го ключа, 2-й вход которого связан одновременно с выходом генератора СВЧ и 2-м входом смесителя, выход которого подключен к входу ФНЧ, а 1-й вход - к выходу 2-го ключа, 1-й вход которого соединен одновременно с выходом приемника и 2-м входом ИКО, 1-й вход которого связан одновременно с выходом модулятора, 1-м входом 1-го ключа и входом ЛЗ, выход которой подключен ко 2-му входу 2-го ключа, а устройство воспроизведения образа цели соединено с выходом ФНЧ.
Недостатком данного устройства является то, что оно не может обеспечить высокую вероятность распознавания воздушных объектов, так как оно проводится с помощью головных телефонов по окраске звука, зависящей от амплитуды и частоты вибраций. Отсутствие точных звуковых эталонов и различные слуховые и идентификационные возможности операторов РЛС, производящих распознавание, служат причинами возможных ошибок. Если в качестве признака распознавания применять не тембр звука, а распределение спектральных откликов по частотам вибрационного диапазона, то и в этом случае вероятность распознавания будет невысока, так как в данном устройстве не учитывается ракурс полета объектов и скорость их перемещения относительно локатора, от которых зависит структура частотного портрета вибрационного диапазона. К тому же в данном устройстве производится не слежение за объектом, а только стробирование по дальности, что может привести к попаданию в рабочую дистанцию сигналов, рассеянных несколькими объектами, что вызовет увеличение ошибок распознавания.
Известно также радиолокационное распознающее устройство [2], содержащее генератор СВЧ, модулятор, синхронизатор, антенну, антенный переключатель (АП), приемник, систему измерения дальности (СИД), систему управления антенной (СУА), аналого-цифровой преобразователь (АЦП), запоминающее устройство (ЗУ), счетно-решающий прибор (СРП), систему измерения скорости (СИС), вычислитель быстрого преобразования Фурье (БПФ), а также блок радиолокационного распознавания, состоящий из блока вывода результатов распознавания, блока выбора эталонов и микропроцессора. При этом синхронизатор соединен со входом модулятора и 2-м входом СИД, 1-й вход которой связан с 1-м выходом приемника, входом СУА, входом АЦП, выход которого подключен ко входу ЗУ, выход которого связан со входом вычислителя БПФ, выход которого соединен с 1-м входом микропроцессора, выход которого соединен со входом блока вывода результатов распознавания, а 2-й вход - с выходом блока выбора эталонов. Первый вход блока выбора эталонов подключен к выходу СИС, связанной своим входом со 2-м выходом приемника, а 2-й вход - к выходу СРП, 1-й вход которого связан с выходом СИД, а второй - с 2-м выходом СУА, 1-й выход которой механически связан с антенной, вход-выход которой соединен с вход-выходом АП, выход которого связан со входом приемника, а 2-й вход - с выходом генератора СВЧ, вход которого подключен к выходу модулятора.
Данное устройство не обеспечивает высокую достоверность распознавания воздушных объектов, поскольку оно использует всего лишь один признак распознавания (вибрационный эффект), информативность которого зависит от турбулентности атмосферы, которая не учитывается в алгоритме принятия решения. К тому же диапазон вибрационных составляющих пересекается с диапазоном вторичного доплеровского эффекта, что может привести к ошибкам распознавания.
Целью изобретения является повышение достоверности распознавания воздушных объектов за счет использования логического алгоритма распознавания и расширенного словаря признаков.
Поставленная цель достигается тем, что в состав известного устройства [2] дополнительно вводят 2-й, 3-й 4-й и 5-й АЦП, блок вычисления эффективной площади рассеяния (БВЭПР), N узкополосных фильтров, сумматор, 1-е, 2-е, 3-е, 4-е, 5-е, 6-е и 7-е ЗУ, 1-ю, 2-ю, 3-ю, 4-ю, 5-ю, 6-ю и 7-ю схемы сравнения (СС), дешифратор, 1-ю и 2-ю схемы сравнения неоднозначности (СУН), 1-ю и 2-ю схемы НЕ, 1-ю, 2-ю и 3-ю схемы И-НЕ, 1-ю, 2-ю, 3-ю схемы ИЛИ и блок индикации (БИ), причем 2-й выход СУА соединяют с 3-м входом СРП, 1-й выход которого соединяют со входом 1-го АЦП, 2-й выход - со входом 2-го АЦП, а 3-й выход - со входом 5-го АЦП, 2-й выход приемного устройства (ПрУ) одновременно соединяют со входами N узкополосных фильтров, выход каждого из которых подключают к соответствующему из N входов сумматора, выход которого соединяют со входом 3-го АЦП, 3-й выход ПрУ соединяют со входом БВЭПР, выход которого соединяют со входом 4-го АЦП, выход которого соединяют с 1-м входом 5-й СС, 2-й вход которой соединяют с выходом 5-го ЗУ, а выход - с 3-м входом дешифратора, 5-й вход которого соединяют с выходом 6-й СС, 2-й вход которой подключают к выходу 6-го ЗУ, а 1-й - к выходу 5-го АЦП и 1-му входу 7-й СС, 2-й вход которой соединяют с выходом 7-го ЗУ, а выход - с 1-м входом 2-й СУН, 2-й и 3-й входы которой подключают соответственно к 17-му и 18-му выходам дешифратора, 4-й вход которого соединяют с выходом 2-й СС, 2-й вход которой подключают к выходу 2-го ЗУ, а 1-й - одновременно к выходу 1-го АЦП и 1-му входу 1-й СС, 2-й вход которой соединяют с выходом 1-го ЗУ, а выход - с 1-м входом 1-й СУН, 2-й и 3-й входы которой соединяют соответственно с 1-м и 2-м выходами дешифратора, 1-й вход которого соединяют с выходом 3-й СС, 1-й вход которой подключают к выходу 2-го АЦП, а 2-й вход - к выходу 3-го ЗУ, выход 3-го АЦП соединяют с 1-м входом 4-й СС, 2-й вход которой соединяют с выходом 4-го ЗУ, а выход - с 2-м входом дешифратора, 3-й, 4-й, 7-й и 8-й выходы которого соединяют соответственно с 1-м, 2-м, 3-м и 4-м входами 1-й схемы И-НЕ, выход которой подключают к 2-му входу БИ, 3-й вход которого соединяют с выходом 1-й схемы ИЛИ, 1-й вход которой соединяют с 2-м выходом 1-й СУН, 1-й выход которой соединяют с 6-м входом БИ, 7-й вход которого подключают к выходу 2-й схемы И-НЕ, входы с 1-го по 10-й которой подключают соответственно к 5-му, 6-му, 9-му, 10-му, 13-му, 14-му, 21-му, 22-му, 29-му, 30-му выходам дешифратора, 11-й, 12-й, 15-й, 16-й, 19-й, 20-й, 23-й, 24-й, 27-й, 28-й, 31-й и 32-й выходы которого подключают к соответствующим с 1-го по 12-й входы 3-й схемы И-НЕ, выход которой соединяют с 1-м входом БИ, 4-й вход которого соединяют с выходом 3-й схемы ИЛИ, 1-й вход которой подключают к выходу 2-й схемы НЕ, вход которой соединяют с 26-м выходом дешифратора, 25-й выход которого подключен к входу 1-й схемы НЕ, выход которой соединяют с 1-м входом 2-й схемы ИЛИ, выход которой соединяют с 5-м входом БИ, а 2-й вход с 2-м выходом 2-й СУН, 1-й выход которой соединяют с 2-м входом 1-й схемы ИЛИ, а 3-й - с 2-м входом 3-й схемы ИЛИ.
Предложенное построение схемы устройства позволяет существенно повысить вероятность распознавания классов воздушных объектов на основе логического алгоритма распознавания (ЛАР) по совокупности сигнальных и траекторных признаков.
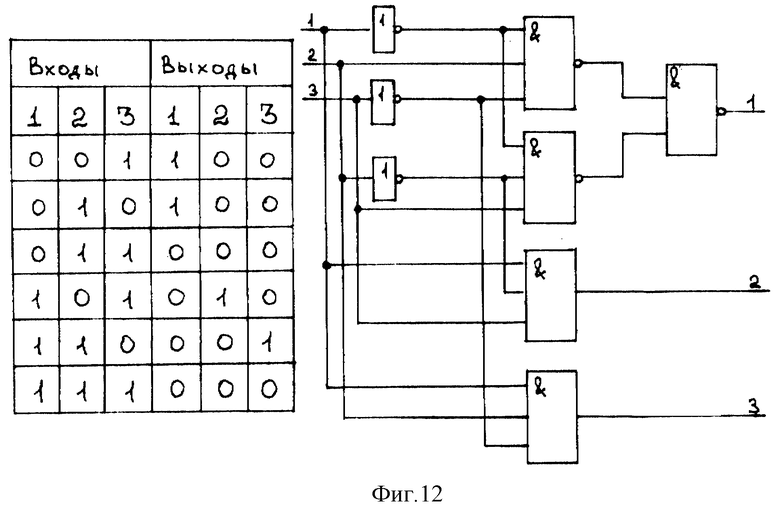
На фиг. 1 представлена структурная схема устройства распознавания воздушных объектов.
Данное устройство включает в свой состав: генератор СВЧ 1, модулятор 2, синхронизатор 3, антенну 4, АП 5, ПрУ 6, СИД 7, СУА 8, БВЭПР 9, N фильтров 10, СРП 11, сумматор 12, пять АЦП 13-17, семь ЗУ 18, 21, 22, 24, 26, 28, 31, семь СС 19, 20, 23, 25, 27, 29, 30, дешифратор 32, СУН 33 и 36, схемы НЕ 34 и 35, схемы ИЛИ 37, 41 и 42, схемы И-НЕ 38, 39, 40 и БИ 43.
Устройство логического распознавания в соответствии со своей внутренней структурой работает следующим образом.
Генератор СВЧ 1 формирует мощные СВЧ-импульсы в моменты подачи на его вход модулирующих импульсов с выхода модулятора 2, работой которого управляет синхронизатор 3. СВЧ-импульсы через АП 5 поступают на антенну 4 и излучаются ею в направлении объекта, выбранного для распознавания. Отраженные воздушным объектом электромагнитные волны улавливаются антенной 4 и через АП 5 поступают на вход ПрУ 6, включающего в свой состав преобразователи частоты, частотные фильтры, усилители и детекторы (на фиг. 1 не показаны) [3]. Продетектированные сигналы с амплитудного детектора (АД) ПрУ 6 поступают на вход СУА 8 и 1-й вход СИД 7. Выход АД является 1-м выходом ПрУ 6. В СИД 7 производится измерение дальности r до сопровождаемого воздушного объекта по времени задержки отраженных сигналов относительно синхроимпульсов, поступающих на 2-й вход СИД 7 с синхронизатора 3. В СУА 8 производится измерение угловых координат (азимута β и угла места ε) объекта. Для этого в РЛС должен быть реализован метод конического сканирования, то есть конического развертывания луча антенны при вращении облучателя, смещенного из фокуса параболического зеркала. Информация об угловом положении объекта заключена в огибающей амплитуд принимаемых сигналов и однозначно считывается за период сканирования. Поэтому в СУА 8 производится выделение огибающей видеоимпульсов, поступающих на ее вход с 1-го выхода ПрУ 6, а по параметрам огибающей определяются сигналы ошибок по β и ε, управляющие приводами СУА 8, которые механически доворачивают антенну 4 в направлении на объект [3, с. 424-428]. На фиг. 1 это показано двумя механическими связями между СУА 8 и антенной 4. Два других электрических выхода СУА 8 соединены с 2-м и 3-м входами СРП 11. С их помощью сигнал, пропорциональный ε (с 1-го выхода СУА 8), и сигнал, пропорциональный β (с 2-го выхода СУА 8), поступают на 2-й и 3-й входы СРП 11, на 1-й вход которого приходят сигналы дальности с выхода СИД 7.
Второй выход ПрУ 6 предназначен для измерения эффективной площади рассеяния (ЭПР) объекта в БВЭПР 9. Известно, что амплитуда сигнала, отраженного от любого объекта, пропорциональна его отражательной способности [3]. Однако в моноимпульсной системе сопровождения тракт обработки снабжен автоматической регулировкой усиления (АРУ), которая призвана выравнивать сигналы, отраженные разными объектами. В связи с этим для выявления информации об ЭПР объекта предлагается анализировать непосредственно управляющий сигнал АРУ. Чем больше ЭПР объекта, тем меньше должен стать коэффициент усиления сигнала, то есть напряжение АРУ однозначно отражает величину ЭПР объекта. Сигнал АРУ с 3-го выхода ПрУ 6 поступает на вход блока 9, где на основе заранее рассчитанного коэффициента преобразуется в сигнал, уровень которого равен искомой ЭПР. Блок 9 может содержать катодный повторитель, инвертор, усилитель, но самое главное - он должен содержать одновходовый амплитудный накопитель со сбросом и делитель (на фиг. 1 не показаны). Это связано с тем, что используемые отраженные сигналы промодулированы по амплитуде с частотой сканирования РЛС, и информативностью будет обладать лишь сигнал, усредненный по амплитуде за период сканирования Tск. Значит, амплитудный накопитель должен в течение периода Tск накапливать амплитуды поступающих на его вход сигналов, после чего выдавать со своего выхода на вход делителя суммарный сигнал. Делитель уменьшает входной сигнал в K раз, где K - число импульсов, поступающих за период сканирования Tск. Выходной сигнал накопителя используется для его же сброса, пройдя линию задержки. Выход делителя является выходом БВЭПР 9. С выхода блока 9 сигнал подается на вход 4-го АЦП 16, где преобразуется в цифровой код для дальнейшего использования в распознавании.
Второй выход ПрУ 6 является выходом усилителя промежуточной частоты и служит для выделения гармоник турбинного и турбовинтового эффектов. Он связан со входами N полосовых фильтров 10 аналогично устройству, показанному в [3, с. 81, рис. 2.8]. Под фильтром 10, следует понимать непосредственно узкополосный фильтр и детектор на его выходе. Суммарная полоса N фильтров перекрывает диапазон частот, в котором распределены гармоники турбинного и турбовинтового эффектов. Полосы смежных фильтров 10 не перекрываются. Таким образом, если объект наделен турбиной или винтом, то на выходе одного из фильтров 10 появится сигнал. Выходные сигналы фильтров 10 складываются в сумматоре 12. Выходной сигнал N-входового сумматора 12 равен сумме амплитуд сигналов, поступивших на его N входов. Чем ярче проявляется "турбинный эффект", тем выше сигнал на выходе блока 12. В дальнейшем этот сигнал проходит на вход 3-го АЦП 15, где преобразуется в цифровой вид, характеризующий наличие турбинных и турбовинтовых составляющих в спектре сигнала объекта.
СРП 11 предназначен для расчета линейной скорости объекта V, высоты полета H и курсового параметра P на основе знания угловых координат ε,β и дальности r объекта в разные моменты времени. Напомним, что СРП 11 обладает координатами ε,β и r объекта в любой момент времени. СРП 11 пересчитывает эти данные в прямоугольные координаты x, y и z по известным формулам преобразования. Координата z используется в качестве высоты полета объекта H и подается с 1-го выхода СРП 11 на первые входы 1-й и 2-й СС 19 и 20 через 1-й АЦП 13. Линейная скорость объекта V может быть тривиально рассчитана по формуле:
где x1, y1, z1 - координаты объекта в 1-й момент времени t1;
x2, y2, z2 - координаты объекта во 2-й момент времени t2;
Δt = t2 - t1 - интервал времени наблюдения.
Сигнал, пропорциональный скорости цели V, с 3-го выхода СРП 11 поступает на вход 5-го АЦП 17 и после преобразования в цифровой код подается на входы 6-й и 7-й СС 29 и 30.
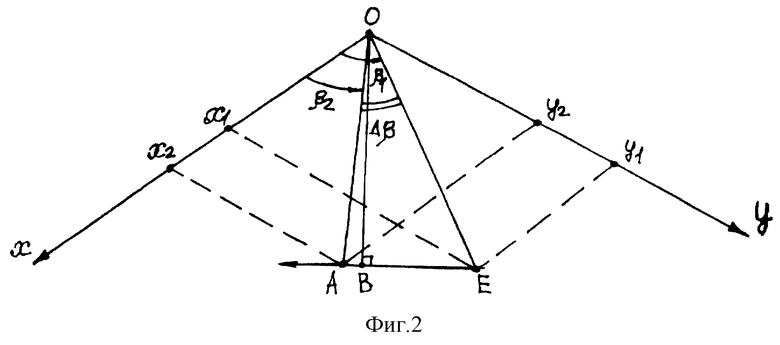
Расчет курсового параметра P более сложен. Для его пояснения рассмотрим фиг. 2. На ней изображена горизонтальная плоскость xoy, на которой точками E и A показаны проекции пространственного расположения объекта в моменты t1 и t2. Отрезок  показывает проекцию пути, пройденного объектом за интервал Δt, на горизонтальную плоскость. Точка E имеет координаты ε1,β1, r1, x1, y1, a точка A - координаты ε1,β1, r1, x1, y1. Удаление точек E и A от начала координат (места расположения РЛС) определяется:
показывает проекцию пути, пройденного объектом за интервал Δt, на горизонтальную плоскость. Точка E имеет координаты ε1,β1, r1, x1, y1, a точка A - координаты ε1,β1, r1, x1, y1. Удаление точек E и A от начала координат (места расположения РЛС) определяется:
Длина отрезка  находится из треугольника ОАЕ:
находится из треугольника ОАЕ:
Параметр P рассчитывается в рамках гипотезы о прямолинейном и равномерном движении объекта (фиг. 2). Очевидно, что курсовой параметр P, как кратчайшее расстояние от РЛС до проекции траектории движения объекта на плоскость xoy, может быть вычислен по формуле
С учетом того, что Δβ = β1-β2, по теореме синусов имеем:
откуда
Значит
Сигнал, пропорциональный курсовому параметру P, с 2-го выхода СРП 11 поступает на вход 2-го АЦП 14, где преобразуется в цифровую форму для дальнейшего использования в 3-й СС 23.
Итак, рассчитанные значения высоты H, параметра P, линейной скорости V и ЭПР, а также сигнал, характеризующий наличие турбинных составляющих частотного диапазона объекта, в виде напряжений поступают с 1-го, 2-го и 3-го выходов СРП 11 на входы 1-го, 2-го и 5-го АЦП 13, 14 и 17, а с выходов сумматора 12 и БВЭПР 9 - на входы 3-го и 4-го АЦП 15 и 16 соответственно. АЦП преобразуют амплитуды напряжений в цифровые данные, которые проходят: с выхода 1-го АЦП на 1-е входы 1-й и 2-й СС 19 и 20, с выхода 2-го АЦП 14 на 1-й вход 3-й СС 23, с выхода 3-го АЦП 15 на 1-й вход 4-й СС 25, с выхода 4-го АЦП 16 на 1-й вход 5-й СС 27, а с выхода 5-го АЦП 17 на 1-е входы 6-й и 7-й СС 29 и 30. Эти сигналы участвуют в ЛАР, сущность которого заключается в следующем [4] . Классы и признаки распознавания рассматриваются как логические переменные. Для описания классов на языке выбранных признаков необходимо выяснить, какими из них характеризуется каждый класс, после чего установить зависимости в форме булевых соотношений только между классами и только между признаками. С учетом сказанного предлагается следующий порядок описания классов на языке логических признаков.
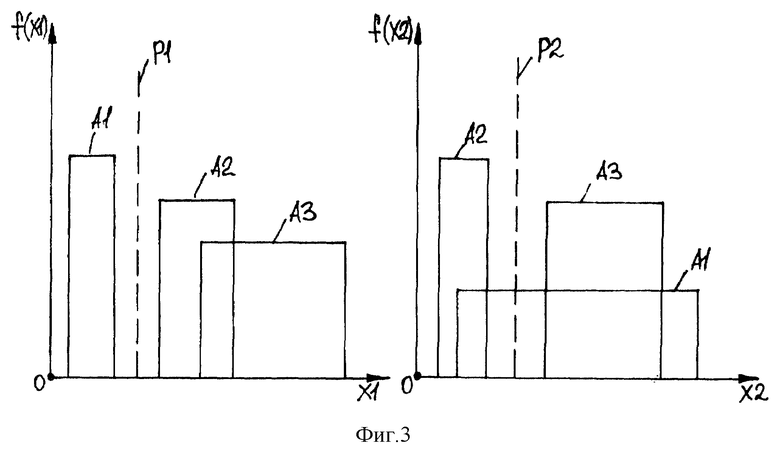
Пусть множество объектов подразделено на классы A1, A2, A3, а для описания объектов используются признаки X1 и X2. Законы распределения признаков равномерные (фиг. 3). Для каждого признака выставим по правилу идеального наблюдателя пороги P1 и P2 соответственно. Условимся считать, что класс A1, A2 или A3 обладает признаками X1 и X2, если для этого класса значение признака превышает (или может превышать) порог. В противном случае - не обладает. Тогда, в соответствии с принятым правилом, установим, например, для класса A2, что он обладает признаком X1 и не обладает признаком X2. Применяя символику алгебры логики [4], запишем этот результат следующим образом:
Запись читается так: если объект относится к классу A2, то он обладает признаком X1 и не обладает признаком X2. Аналогично для классов A1, A3 и с учетом известных законов алгебры логики [4, с. 97] можно записать:
A3 ---> X1 • X2.
Поступая указанным образом в реальном алгоритме, получим априорное описание классов на языке признаков в форме булевых соотношений. Дальнейшее решение задачи распознавания сводится к решению полученных булевых соотношений. Эффективные методы решений булевых соотношений изложены в [4].
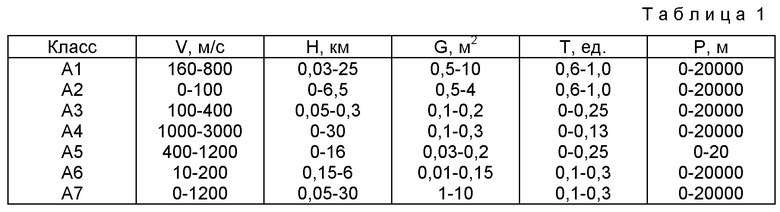
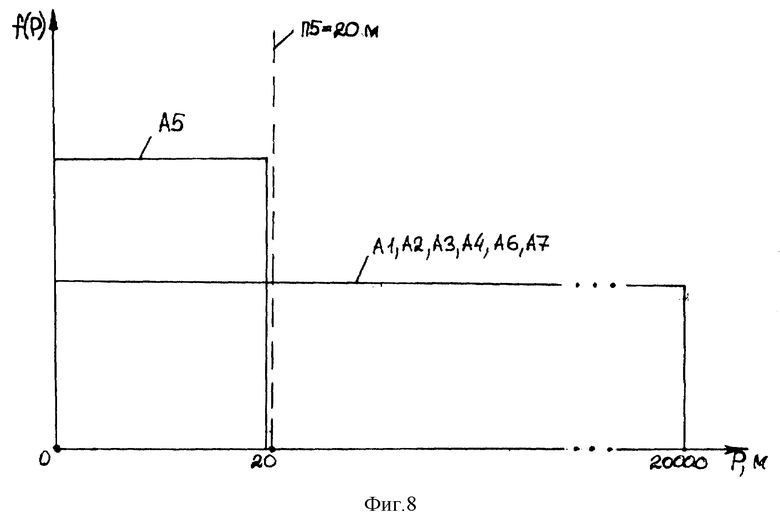
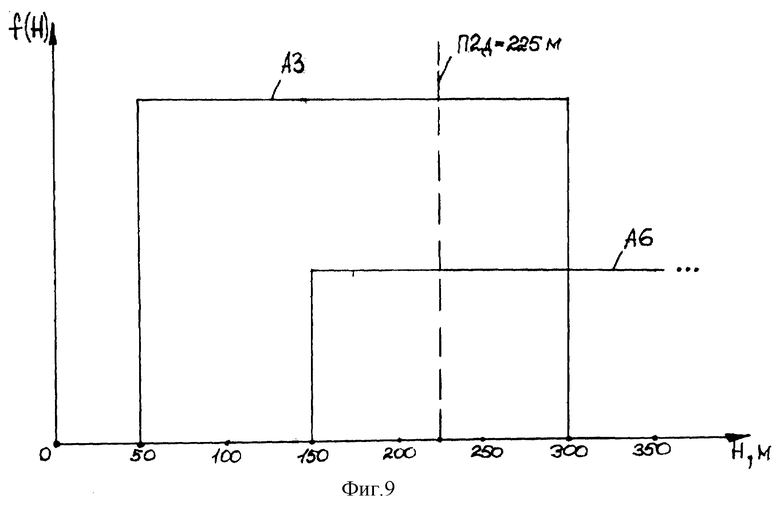
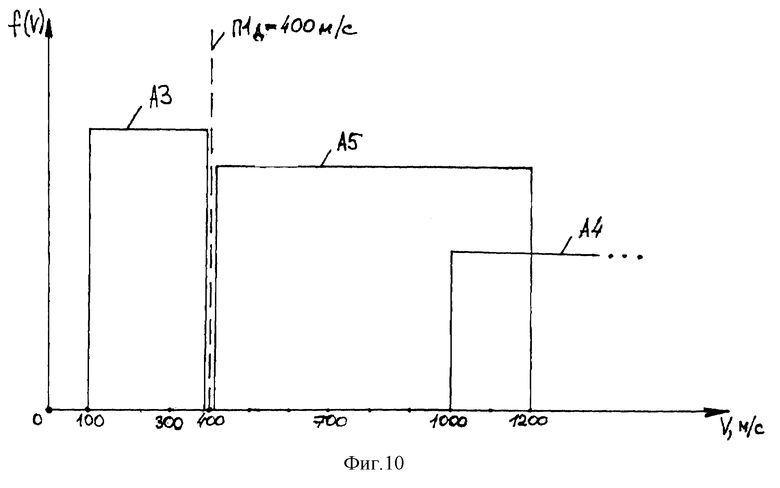
В предлагаемом устройстве (фиг. 1) использован следующий алфавит классов: A1 - самолет, A2 - вертолет, A3 - крылатая ракета, A4 - баллистическая ракета, A5 - противорадиолокационная ракета, A6 - дистанционно-пилотируемый летательный аппарат, A7 - ложная цель. В качестве рабочего словаря признаков приняты: V - линейная скорость, H - высота, G - среднее значение ЭПР в сантиметровом диапазоне волн, T - нормированное значение турбинных и турбовинтовых составляющих частотного диапазона и P - курсовой параметр объекта относительно РЛС.
Диапазоны изменений значений признаков для классов A1,...,A7 представлены в табл. 1 [5, 6]. Значения признаков, указанные в табл. 1, являются вариантом возможного выбора. Граничные значения диапазонов признаков могут уточняться для конкретных условий. При этом чем точнее будут описаны признаки, тем выше будут результаты распознавания. Сейчас демонстрируется принципиальная возможность логического распознавания 7 классов по 5 признакам.
Предположим, что законы распределения признаков носят равномерный характер.
Для каждого признака установим по одному значению порога, чтобы обеспечить наилучшее разделение классов (фиг. 4, 5, 6, 7, 8). Установим правило: если значение признака для класса A1,...,A7 больше порога, то он обладает данным признаком (и не обладает в противном случае). С использованием ранее введенной символики, получим: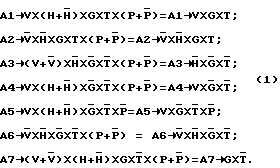
Перепишем (1) в форме соотношений эквивалентности [4]. Получим: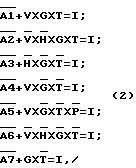
где I - универсальный истинный элемент. Для сокращения числа исходных зависимостей перемножим соотношения (2) между собой и после преобразований получим: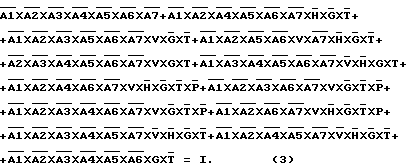
Полученное уравнение представляет собой сведения априорного характера, выражающее связь между классами A1,...,A7 и признаками V, H, G, T и P.
В отношении используемых признаков предположим, что они независимы. Тогда имеет право существовать любая комбинация признаков из 32 возможных.
Для классов A1, ...,A7 справедливы следующие утверждения: любой объект должен быть отнесен хотя бы к одному из классов; объект не может быть отнесен к двум и более классам одновременно.
Эти утверждения можно записать в следующем виде: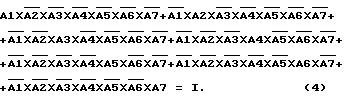
Обозначим слагаемые выражения (4) через K1, K2,...,K7 соответственно и запишем его в виде:
K1 + K2 + K3 + K4 + K5 + K6 + K7 = I. (5)
Перемножим между собой левые части соотношений (3) и (4). Тогда, с учетом (5) получим: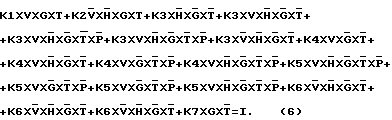
Представим выражение (6) в более удобном виде:
Полученное уравнение (7) представляет собой сведения априорного характера о классах объектов. Оно позволяет сделать выводы о принадлежности объекта к тому или иному классу на основе апостериорной информации, полученной РЛС в виде совокупности признаков X (V, H, G, T, P). Математически эти выводы следуют из решения уравнения:
X • Y = I, (8)
где Y - сведения априорного характера о классах объектов, X - апостериорная информация о совокупности признаков.
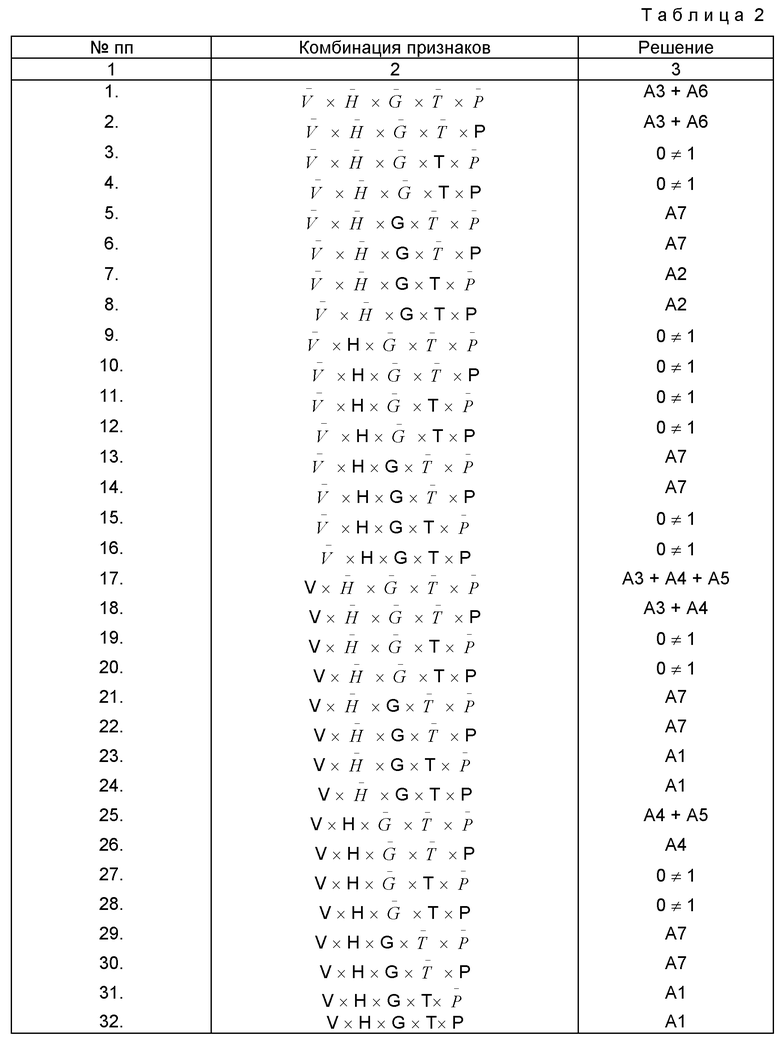
Решения уравнения (8) были найдены методом, существо которого изложено в [4, с. 104-109], а затем сведены в табл. 2.
Как видно из табл. 2, однозначное принятие решения осуществляется в комбинациях признаков под номерами: 5-8, 13, 14, 21-24, 26, 29-32. В комбинациях признаков 1, 2, 17, 18, 25 присутствует неоднозначность принятия решения.
Для того, чтобы устранить неоднозначность между 3-м и 6-м классами (комбинации признаков 1 и 2), целесообразно более точнее проанализировать значение признака H путем введения дополнительного порога П2д=225 м (фиг. 9). Если значение признака больше порога, то объект относится к 6-му классу, иначе - к 3-му.
Для того, чтобы устранить неоднозначность между 3-м, 4-м и 5-м классами (комбинации признаков 17 и 18), предлагается более строго анализировать значение признака V путем введения дополнительного порога П1д=400 м/с (фиг. 10). Если скорость объекта больше порога, то он относится к 4-му классу для комбинации признаков под номером 19 или к 5-му для комбинации признаков под номером 18, иначе объект относится к 3-му классу.
В случае появления комбинации признаков под номером 25 объект предлагается относить к 5-му классу, так как значение признака P не превышает порога П5.
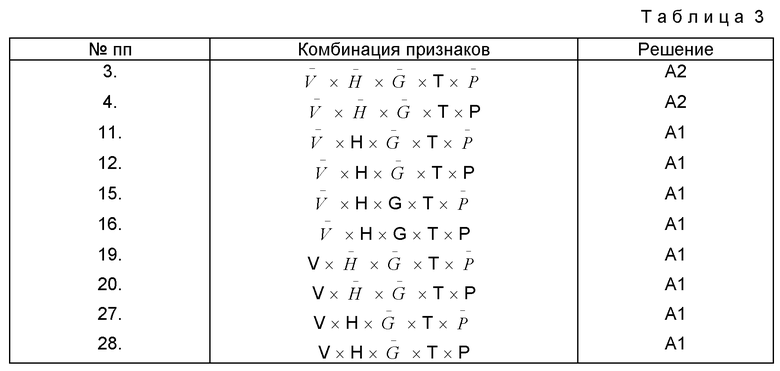
Как видно из табл. 2, существуют также комбинации признаков под номерами: 3, 4, 9-12, 15, 16, 19, 20, 27, 28, при которых уравнение (8) не имеет решения. Для этих комбинаций признаков решения были получены с использованием функции сходства [7, с. 131] методом математического моделирования. Для этого все комбинации признаков представлялись в двоичном коде: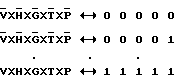
Для каждого из кодов, соответствующих комбинациям признаков под номерами: 3, 4, 9-12, 15, 16, 19, 20, 27, 28, вычислялось значение функции сходства со всеми остальными комбинациями. Затем выбирался вариант, при котором функция сходства максимальна. Поскольку было известно, к какому классу относилась одна из комбинаций признаков, то и вторая относилась к этому же классу. Эти операции проделывались для 9 функций сходства [7, с.132, табл.3.5]. Затем, анализируя результаты отнесения по всем функциям сходства, окончательно определялось, к какому классу отнести каждую из комбинаций.
В результате проведенного математического моделирования были получены результаты, которые представлены в табл. 3.
Как видно из табл. 3, в ней представлены только 10 из 12 комбинаций признаков, для которых уравнение (8) не имеет решения.
Для комбинаций признаков под номерами 9 и 10 произошло совпадение максимумов функций сходства, причем максимумы принадлежат разным классам.
Комбинация признаков под номером 9 в 86% случаев была отнесена к 5-му или 7-му, а в 14% случаев - к 3-му или 6-му классам. Зная диапазоны изменений значений признаков V и H для классов A3, A5, A6 и A7 (табл. 1), а также с учетом порогов П1 и П2 по данным признакам нецелесообразно относить эту комбинацию признаков к 3-му, 5-му или 6-му классам. С другой стороны, для 7-го класса не выполняется условие превышения порога П3. В качестве 3-го признака используется среднее значение ЭПР, которое зависит от ракурса объекта, что следует из диаграммы, обратного рассеивания (ДОР). ДОР имеет изрезанный вид и для сантиметрового диапазона волн изменения могут составлять 25-35 дБ [8]. Поэтому вполне возможно, что значение признака реального объекта не превысит порога, так как это будет провал ДОР. С учетом сказанного, комбинацию признаков под номером 9 предлагается относить к 7-му классу.
Комбинация признаков под номером 10 в 85% случаев была отнесена к 4-му или 7-му, а в 15% случаев - к 3-му, 4-му или 5-му классам. Зная диапазон изменения признака V для класса A4 (табл. 1), а также с учетом порога П1, по данному признаку эту комбинацию нецелесообразно относить к 4-му классу. Дальнейшие рассуждения, выполненные для комбинации признаков под номером 9, справедливы и в данном случае. Поэтому комбинацию признаков под номером 10 предлагается относить к 7-му классу.
На вторые входы СС с выходов ЗУ поступают в цифровом виде пороги для каждого признака: на 1-ю СС 19 с 1-го ЗУ 18 порог П2д, на 2-ю СС 20 с 2-го ЗУ 21 порог П2, на 3-ю СС 23 с 3-го ЗУ 22 порог П5, на 4-ю СС 25 с 4-го ЗУ 24 порог П4, на 5-ю СС 27 с 5-го ЗУ 26 порог П3, на 6-ю СС 29 с 6-го ЗУ 28 порог П1 и на 7-ю СС 30 с 7-го ЗУ 31 порог П1д. Результатом сравнения служит обнаружение состояния, когда значение признака больше порога. В этом случае выход СС устанавливается в состояние логической единицы (ЛЕ), иначе в состояние логического нуля (ЛН). Данную процедуру можно реализовать на цифровых интегральных микросхемах (ИМС) КР1533СП1 [9, с. 302].
С выходов 3-й, 4-й, 5-й, 2-й и 6-й СС сигналы в виде ЛН или ЛЕ проходят на входы 1-5 дешифратора 32 соответственно. На том из выходов, номер которого соответствует двоичному эквиваленту входного кода (вход 1 - младший разряд, вход 5 - старший), будет уровень ЛН, на остальных выходах - ЛЕ. Эту операцию можно осуществить на цифровых ИМС КР1533ИД3 [9, с. 55]. Схема построения дешифратора 5 ---> 32 описана в [10, с. 32, рис. 39].
С 3-го, 4-го, 7-го и 8-го выходов дешифратора 32 сигналы в виде ЛЕ, либо ЛН на одном из них, поступают соответственно на 1-4 входы 1-й схемы И-НЕ 38. Для формирования уровня ЛЕ на выходе 1-й схемы И-НЕ 38, что в свою очередь является результатом отнесения объекта к 2-му классу, достаточно появления на одном из ее входов ЛН. При выполнении данного условия сигнал в виде ЛЕ с выхода 1-й схемы И-НЕ 38 поступает на 2-й вход БИ 43.
С выходов 5, 6, 9, 10, 13, 14, 21, 22, 29, 30 дешифратора 32 сигналы в виде ЛЕ, либо ЛН на одном из них, поступают на 1-10 входы 2-й многовходовой схемы И-НЕ 39 соответственно. Многовходовая схема И строится путем каскадного включения и описана в [10, с.10, рис.2,а]. Выход данной схемы предлагается дополнительно инвертировать элементом НЕ. Для формирования ЛЕ на выходе схемы, что в свою очередь является результатом отнесения объекта к 7-му классу, достаточно появления на одном из ее входов ЛН. При выполнении данного условия сигнал в виде ЛЕ с выхода 2-й схемы И-НЕ 39 поступает на 7-й вход БИ 43.
С выходов 11, 12, 15, 16, 19, 20, 23, 24, 27, 28, 31, 32 дешифратора 32 сигналы в виде ЛЕ, либо ЛН на одном из них, поступают на 1-12 входы 3-й многовходовой схемы И-НЕ 40 соответственно. Принцип ее работы и построения аналогичен 2-й схеме И-НЕ 39. Формирование ЛЕ на выходе схемы является результатом отнесения объекта к 1-му классу, что индицируется блоком индикации 43 при поступлении на его 1-й вход ЛЕ с выхода 3-й схемы И-НЕ 40.
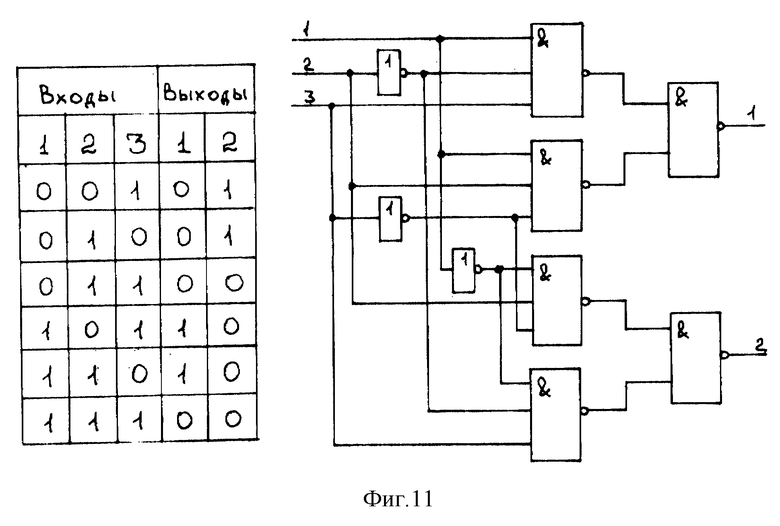
С 1-го и 2-го выходов дешифратора 32 сигналы в виде ЛЕ, либо ЛН на одном из них, поступают на 2-й и 3-й входы 1-й СУН 33, на 1-й вход которой подается сигнал ЛЕ или ЛН с выхода 1-й СС 19. Первая СУН 33 при наличии на 2-м либо 3-м входах ЛН формирует ЛЕ на 1-м выходе, если на ее 1-м входе ЛЕ. При наличии на 1-м входе ЛН 1-я СУН 33 формирует ЛЕ на 2-м выходе. При всех остальных комбинациях сигналов на входах 1-й СУН 33 на ее выходах формируется ЛН. Появление ЛЕ на 1-м выходе 1-й СУН 33 свидетельствует об отнесении объекта к 6-му классу, с 1-го выхода блока 33 ЛЕ должна поступить на 6-и вход БИ 43. В случае формирования ЛЕ на 2-м выходе 1-й СУН 33 она (ЛЕ) подается на 1-й вход 1-й схемы ИЛИ 37. Таблица истинности и предлагаемый вариант построения 1-й СУН 33 представлены на фиг. 11.
С 17-го и 18-го выходов дешифратора 32 сигналы в виде ЛЕ, либо ЛН на одном из них, поступают на 2-й и 3-й входы 2-й СУН 36, на 1-й вход которой подается сигнал ЛЕ или ЛН с выхода 7-й СС 30. Вторая СУН 36 при наличии на 2-м либо 3-м входах ЛН формирует ЛЕ на 1-м выходе, если на ее 1-м входе ЛН. Если на ее 1-м входе ЛЕ, то при наличии на 2-м входе ЛН формируется ЛЕ только на 2-м выходе схемы, а при наличии ЛН на 3-м входе сигнал ЛЕ формируется только на 3-м выходе 2-й СУН 36. При всех остальных комбинациях сигналов на входах 2-й СУН 36 на ее выходах присутствуют сигналы ЛН. Таблица истинности и предлагаемый вариант функционального построения 2-й СУН 36 представлены на фиг. 12.
Сигнал с 1-го выхода 2-й СУН 36 поступает на 2-й вход 1-й схемы ИЛИ 37. Для формирования ЛЕ на выходе схемы 1-й ИЛИ 37 достаточно появления на одном ив ее входов ЛЕ. Появление ЛЕ на выходе схемы свидетельствует об отнесении объекта к 3-му классу, что индицируется блоком индикации 43 при поступлении на его 3-й вход ЛЕ с выхода блока 37.
Сигнал с 2-го выхода 2-й СУН 36 подается на 2-й вход 2-й схемы ИЛИ 41, на 1-й вход которой поступает сигнал с 25 выхода дешифратора 32, дополнительно проинвертированный 1-й схемой НЕ 34. Для формирования ЛЕ на выходе 2-й схемы ИЛИ 41 достаточно появления на одном из ее входов ЛЕ. Появление ЛЕ на выходе схемы является результатом отнесения объекта к 5-му классу. Далее ЛЕ с выхода блока 41 подается на 5-й вход БИ 43.
Сигнал с 3-го выхода 2-й СУН 36 поступает на 2-й вход 3-й схемы ИЛИ 42, на 1-й вход которой подается сигнал с 26 выхода дешифратора 32, дополнительно проинвертированный 2-й схемой НЕ 35. Для формирования ЛЕ на выходе 3-й схемы ИЛИ 42 достаточно появления на одном из ее входов ЛЕ. Появление ЛЕ на выходе схемы свидетельствует об отнесении объекта к 4-му классу. Затем ЛЕ с выхода блока 42 поступает на 4-й вход БИ 43.
Схемы И-НЕ 38-40, ИЛИ 37, 41, 42, НЕ 34, 35, СУН 33, 36 можно реализовать на цифровых ИМС серии КР1533 следующих типов; ЛА2, ЛА4, ЛЕ1, ЛИ3, ЛН1, ЛЛ1 [9, с. 224, 228, 246, 258, 272, 268] соответственно.
БИ 43, в зависимости от того, на каком из его входов присутствует сигнал ЛЕ, индицирует внешний облик или название класса воздушного объекта, в пользу которого произведено распознавание. Наиболее простой индикацией является загорание лампы с названием распознанного класса воздушного объекта.
Из описания работы схемы устройства видно, что оно способно производить распознавание объектов с высокой вероятностью на основе использования ЛАР. Схему отличает простота реализации и наглядность. Знание правил логики могут позволить за счет несущественных изменений схемы изменить количество распознаваемых классов или количество используемых признаков. При этом необходимо как можно точнее производить описание классов на языке признаков для оптимального выбора порогов принятия решений.
Литература
1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984 (аналог).
2. Патент РФ N 2095824. Радиолокационное распознающее устройство. МПК6 G 01 S 13/02. Авторы: Митрофанов Д.Г., Максаков И.М., Печенев А.А. Патентообладатель: ВА ПВО СВ РФ. Заявка N 96100426. Приоритет 9.01.96 г. Опубл. 10.11.97 г. (прототип).
3. Финкельштейн М.И. Основы радиолокации. Учебник для вузов. М.: Радио и связь. 1983. - 536 с.
4. Горелик А.Л., Скрипкин В.А. Методы распознавания: Учебное пособие для ВУЗов. - 2-е изд., перераб. и доп. - М.: Высшая школа, 1977, - 222 с.
5. Головин С.А., Сизов Ю.Г., Скоков А.Л., Хунданов Л.Л. Высокоточное оружие и борьба с ним. М.: изд-во ВПК, 1996.- 231 с.
6. Митрофанов Д.Г., Ермоленко В.П. Распознавание воздушных целей за счет измерения их пространственной протяженности// Зарубежная радиоэлектроника. N 1, 1996, с. 53-56.
7. Фор А. Восприятие и распознавание образов. / Пер. с франц. А.В.Серединского / Под ред. Г.П.Катыса. - М.: Машиностроение. 1989 - 272 с.
8. Radar Reflectivity (Special Issue), PIEEE. Vol. 53, N 8, pp. 769-1137 (August 1965).
9. Петровский И. И. , Прибыльский А.В., Троян А.А., Чувелев B.C. Логические интегральные схемы КР1533, КР1554: Справочник. В двух частях. - М.: ТОО "БИНОМ", 1993 - 500 с.
10. Бирюков С.А. Цифровые устройства на интегральных микросхемах. - 3-е изд. перераб. и доп.- М.: Радио и связь, 1991. - 184 с.: ил. -(Массовая радио библиотека. Вып. 1159).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| МНОГОПОЛЯРИЗАЦИОННЫЙ СПОСОБ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2139553C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083993C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1995 |
|
RU2099744C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
Изобретение относится к радиолокационным измерениям и может быть использовано в импульсных РЛС сопровождения цели с коническим сканированием для распознавания воздушных объектов. Технический результат - повышение достоверности распознавания воздушных объектов за счет использования правил логического распознавания и применения расширенного словаря параметров распознавания. Для этого в состав известного устройства дополнительно вводят 4 аналого-цифровых преобразователя, блок вычисления эффективной площади рассеяния, N узкополосных фильтров, сумматор, 7 запоминающих устройств, 7 схем сравнения, дешифратор, 2 схемы устранения неоднозначности, 2 схемы НЕ, 3 схемы И-НЕ, 3 схемы ИЛИ и блок индикации, изменяя соответствующим образом межблочные связи. Это позволяет с высокой вероятностью распознавать 7 классов объектов по 5 признакам. Схему устройства отличает простота реализации и наглядность. Знание правил логики может позволить за счет несущественных изменений схемы изменить количество распознаваемых классов или количество используемых признаков. 12 ил., 3 табл.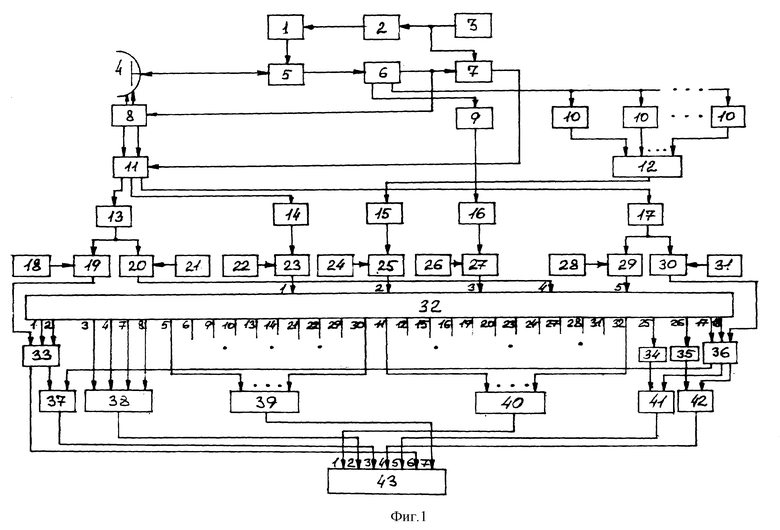
Устройство логического распознавания воздушных объектов, включающее антенну, первый аналого-цифровой преобразователь, систему управления антенной, последовательно включенные синхронизатор, модулятор, генератор СВЧ, антенный переключатель, приемное устройство, систему измерения дальности и счетно-решающий прибор, причем выход синхронизатора подключен к второму входу системы измерения дальности, вход-выход антенны соединен с входом-выходом антенного переключателя, первый выход приемного устройства соединен также со входом системы управления антенной, первый и второй механические выходы которой связаны с первым и вторым механическими входами антенны, а первый электрический выход которой подключен к второму входу счетно-решающего прибора, отличающееся тем, что в его состав дополнительно введены второй, третий, четвертый и пятый аналого-цифровые преобразователи, блок вычисления эффективной площади рассеяния, N узкополосных фильтров, сумматор, первое, второе, третье, четвертое, пятое, шестое и седьмое запоминающие устройства, первая, вторая, третья, четвертая, пятая, шестая и седьмая схемы сравнения, дешифратор, первая и вторая схемы устранения неоднозначности, первая и вторая схемы НЕ, первая, вторая и третья схемы И-НЕ, первая, вторая, третья схемы ИЛИ и блок индикации, причем второй выход системы управления антенной соединен с третьим входом счетно-решающего прибора, первый выход которого соединен со входом первого аналого-цифрового преобразователя, второй выход - со входом второго аналого-цифрового преобразователя, а третий выход - со входом пятого аналого-цифрового преобразователя, второй выход приемного устройства соединен одновременно со входами N узкополосных фильтров, выход каждого из которых подключен к соответствующему из N входов сумматора, выход которого соединен со входом третьего аналого-цифрового преобразователя, третий выход приемного устройства соединен со входом блока вычисления эффективной площади рассеяния, выход которого соединен со входом четвертого аналого-цифрового преобразователя, выход которого соединен с первым входом пятой схемы сравнения, второй вход которой соединен с выходом пятого запоминающего устройства, а выход - с третьим входом дешифратора, пятый вход которого соединен с выходом шестой схемы сравнения, второй вход которой подключен к выходу шестого запоминающего устройства, а первый - к выходу пятого аналого-цифрового преобразователя и первому входу седьмой схемы сравнения, второй вход которой соединен с выходом седьмого запоминающего устройства, а выход - с первым входом второй схемы устранения неоднозначности, второй и третий входы которой подключены соответственно к семнадцатому и восемнадцатому выходам дешифратора, четвертый вход которого соединен с выходом второй схемы сравнения, второй вход которой подключен к выходу второго запоминающего устройства, а первый - одновременно к выходу первого аналого-цифрового преобразователя и первому входу первой схемы сравнения, второй вход которой соединен с выходом первого запоминающего устройства, а выход - с первым входом первой схемы устранения неоднозначности, второй и третий входы которой соединены соответственно с первым и вторым выходами дешифратора, первый вход которого соединен с выходом третьей схемы сравнения, первый вход которой подключен к выходу второго аналого-цифрового преобразователя, а второй вход - к выходу третьего запоминающего устройства, выход третьего аналого-цифрового преобразователя соединен с первым входом четвертой схемы сравнения, второй вход которой соединен с выходом четвертого запоминающего устройства, а выход - с вторым входом дешифратора, третий, четвертый, седьмой и восьмой выходы которого соединены соответственно с первым, вторым, третьим и четвертым входами первой схемы И-НЕ, выход которой подключен к второму входу блока индикации, третий вход которого соединен с выходом первой схемы ИЛИ, первый вход которой соединен с вторым выходом первой схемы устранения неоднозначности, первый выход которой соединен с шестым входом блока индикации, седьмой вход которого подключен к выходу второй схемы И-НЕ, входы с первого по десятый которой подключены соответственно к пятому, шестому, девятому, десятому, тринадцатому, четырнадцатому, двадцать первому, двадцать второму, двадцать девятому, тридцатому выходам дешифратора, одиннадцатый, двенадцатый, пятнадцатый, шестнадцатый, девятнадцатый, двадцатый, двадцать третий, двадцать четвертый, двадцать седьмой, двадцать восьмой, тридцать первый и тридцать второй выходы которого подключены к соответствующим с первого по двенадцатый входам третьей схемы И-НЕ, выход которой соединен с первым входом блока индикации, четвертый вход которого соединен с выходом третьей схемы ИЛИ, первый вход которой подключен к выходу второй схемы НЕ, вход которой соединен с двадцать шестым выходом дешифратора, двадцать пятый выход которого подключен к входу первой схемы НЕ, выход которой соединен с первым входом второй схемы ИЛИ, выход которой соединен с пятым входом блока индикации, а второй вход с вторым выходом второй схемы устранения неоднозначности, первый выход которой соединен с вторым входом первой схемы ИЛИ, а третий - с вторым входом третьей схемы ИЛИ.
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| US 3614779 A, 19.10.1971 | |||
| US 5561431 A, 01.10.1996 | |||
| Замок для соединения бортов формы | 1977 |
|
SU747724A1 |
| НЕБАБИН В.Г., СЕРГЕЕВ В.В | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с.36 - 37. | |||
