Изобретение относится к судостроению, а именно к судовым полупогружным двигателям, смонтированным подвижно по отношению к корпусу судна.
Известен принятый в качестве ближайшего аналога судовой полупогружной движитель, содержащий гребной вал, размещенный под углом к продольной вертикальной плоскости судна, с полупогружным гребными лопастями, размещенными с возможностью изменения положения по отношению к продольной вертикальной плоскости и(или) к основной плоскости судна (GB, пат. N 11338861, кл. B 60 V 1/14, 1969).
Предложенное изобретение предназначено для повышения экономичности движителя и ходовых качеств судна.
Технический результат достигается тем, что в известном движителе при входе в воду нагнетающая сторона каждой лопасти располагается по существу перпендикулярно продольной вертикальной плоскости судна.
Гребные лопасти могут быть смонтированы на гребном валу с возможностью наклона в пределах ± 30o по отношению к перпендикуляру к оси гребного вала, а также могут вращаться вокруг собственной оси, которая, имеет возможность занимать положение в пределах ±30o по отношению к перпендикуляру к оси гребного винта и его исходном положении.
Иногда целесообразно изменять положение гребных лопастей посредством изменения положения гребного вала по отношению к продольной вертикальной плоскости судна, располагая его под углом 0.90o.
Положение гребных лопастей в пространстве может быть изменено, если смонтировать их на валу, подвижном по отношению к основной плоскости под углом 0.30o.
В одном из примеров осуществления изобретения гребные лопасти целесообразно монтировать на гребном валу, подвижном вокруг оси перпендикулярной основной плоскости судна.
Благодаря наличию трех степеней свободы, гребной вал двигателя согласно изобретению и его гребные лопасти устанавливаются в наиболее эффективном положении для отталкивания от воды вперед, в сторону или назад, в том числе и без изменения направления и скорости вращения гребного вала в аварийных ситуациях.
Это обеспечивает повышенную экономичность, безопасность и маневренность судна или иного плавсредства самоходного аэродрома, гидротехнической платформы и тому подобного. Эти качества наиболее ощутимо проявляются на судах, которые идут в режиме аэродинамического поддержания и конструкция которых позволяет размещать гребные валы кормовых и/или носовых движителей в пределе 0o.90o по отношению к продольной вертикальной плоскости корпуса.
На фиг.1 показан четырехлопастный монопозиционный фронтально-ротативный движитель (вид сбоку); на фиг. 2 вид спереди показанного на фиг.1; на фиг.3 четырехлопастный двухпозиционный движитель вид сбоку; на фиг.4 - четырехлопастный двухпозиционный движитель (вид спереди); на фиг.5 - двухлопастный многопозиционный движитель ленточного типа, вид сбоку; на фиг. 6 двухлопастный многопозиционный движитель ленточного типа, вид сверху; на фиг. 7 вариант размещений 4-поворотных движителей ленточного типа по углам самоходной гидротехнической платформы, вид внизу; на фиг. 8 вид сбоку платформы, показанной на фиг. 7; на фиг. 9 носовая и кормовая части водоизмещающего судна, оснащенного четырьмя монопозиционными двухлопастными движителями, лопасти которых выполнены поворотными и наклоняющимися, вид сбоку; на фиг. 10 вид снизу показанного на фиг. 9 водоизмещающего судна; на фиг. 11 размещение дух саблевидных монопозиционных двухлопастных движителей в кормовой части судна на подводных крыльях, вид снизу; на фиг. 12 вид сзади судна, показанного на фиг. 11; на фиг. 13 левая и правая половины соответственно 4- и 2-моторных экранопланоходов с двумя разными по размерам четырехлопастными монопозиционными движителями, вид спереди; на фиг. 15 вид снизу экранопланоходов, изображенных на фиг. 13, с различными вариантами размещения движителей; на фиг. 15 проекция на горизонтальную плоскость горизонтального сечения известной гребной лопасти (плицы) гребного колеса, погруженной в воду; на фиг. 16 схематичное изображение двух, размещенных под углом одна к другой гребных лопастей обычного винта; на фиг. 17 примеры движения в воде гребных лопастей движителя согласно изобретению параллельно самим себе под углами 0.90o по отношению к поперечно-вертикальной плоскости судна; на фиг. 18-график зависимости тяги движителя согласно изобретению, выраженной в процентах, от направления перемещения гребных лопастей по отношению к поперечной вертикальной плоскости судна; на фиг. 19 - возможные примеры размещения в воде гребных лопастей движителя согласно изобретению при различных эволюциях плавсредства; на фиг. 20 примеры поворотов гребных лопастей для сдвига кормовой и/или носовой части судна влево.
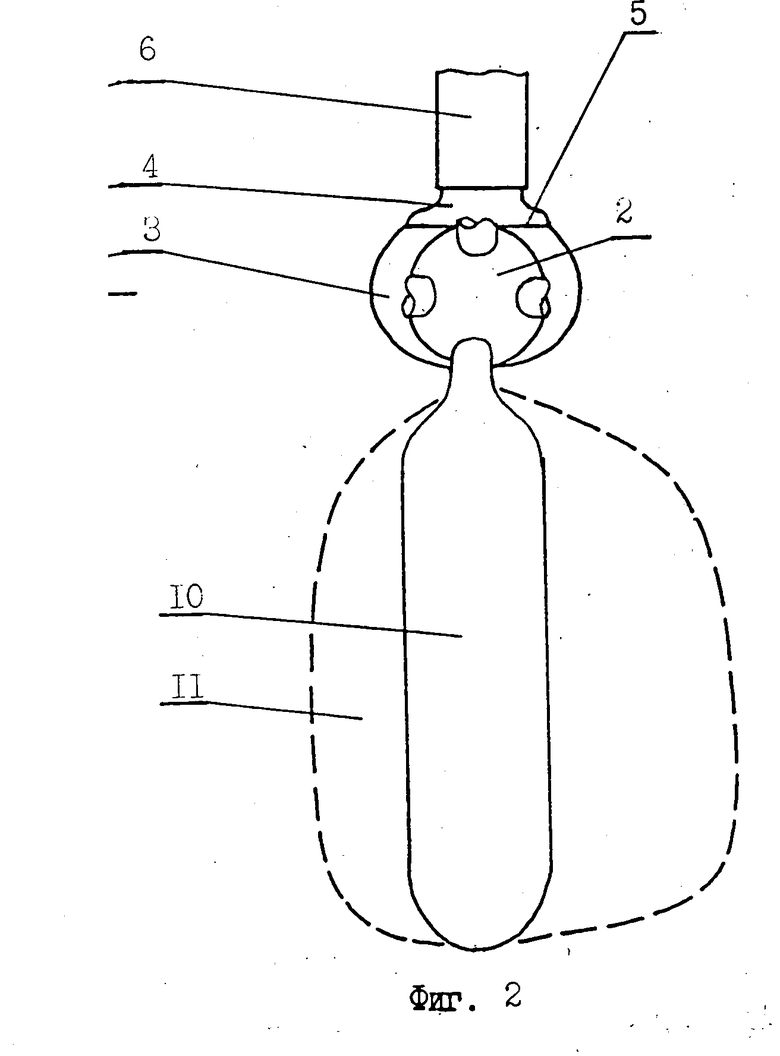
Монопозиционный 4-лопастный движитель, согласно изобретению, предназначенный для установки на судах, использующих гидро- и аэродинамическое поддержание, содержит (фиг.1) поворотные гребные лопасти 1, закрепленные в головке 2 гребного вала, который размещен вместе с редуктором и механизмом поворота лопастей в корпусе 3. В верхней части корпус 3 и примыкающая к нему сверху полая телескопическая стойка 4 шарнирно соединены по линии 5 таким образом, что корпус 3 можно поворачивать в ту или иную сторону в пределе 0o. 90o. Телескопическая стойка 4 размещена в кожухе 6, который в верхней части соединен с корпусом 7 судна с помощью проушин 8, а в средней с механизмом 9 наклона кожуха 6. У разных судов гребные лопасти могут быть разными по устройству и конфигурации.
В одних случаях это будут лопасти близкие к лопастям воздушного винта - лопасть 10 (фиг.2), а в других к лопастям обычного гребного винта лопасть 11 (на фиг. 2 показана пунктиром).
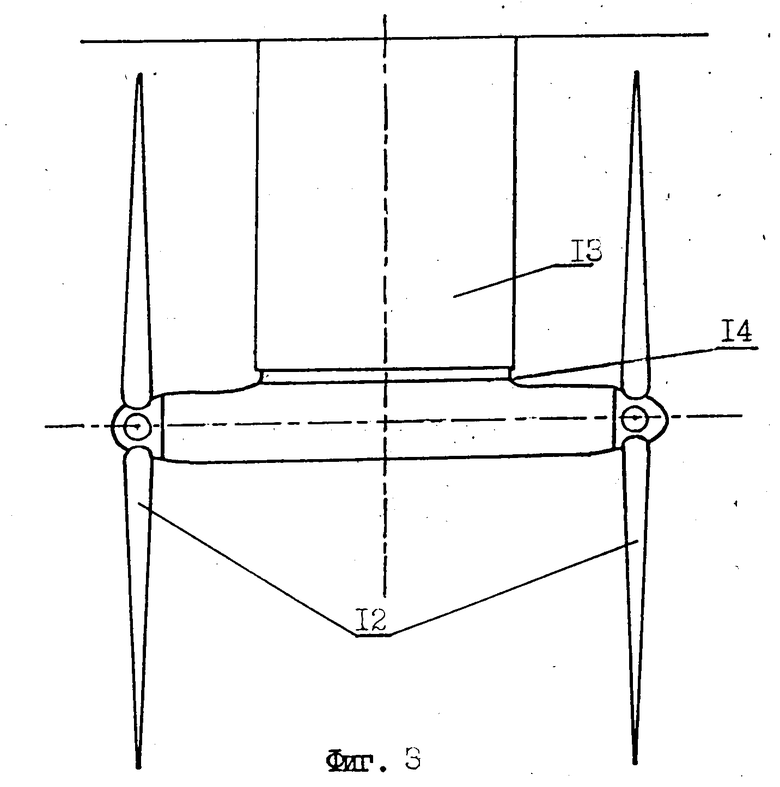
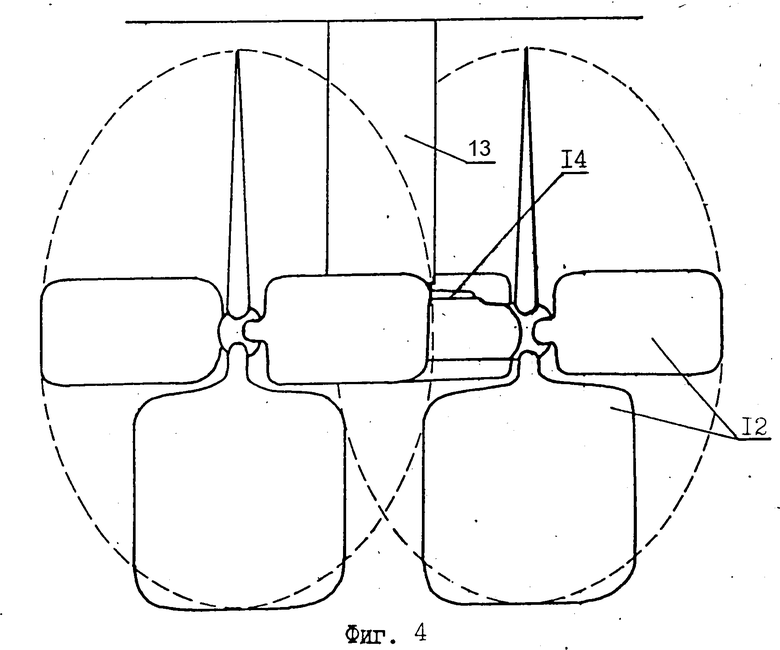
Для крупнотоннажных судов-экраноходов в ряде случаев могут быть использованы двух и более позиционные движители (фиг. 3, 4), когда на одном осевом валу закреплены на определенных расстояниях по две группы гребных лопастей 12. С помощью какого-либо механизма, например, телескопической стойки 13, гребные лопасти 12 вовремя работы могут погружаться в воду на необходимую глубину и поворачиваться по линии 14.
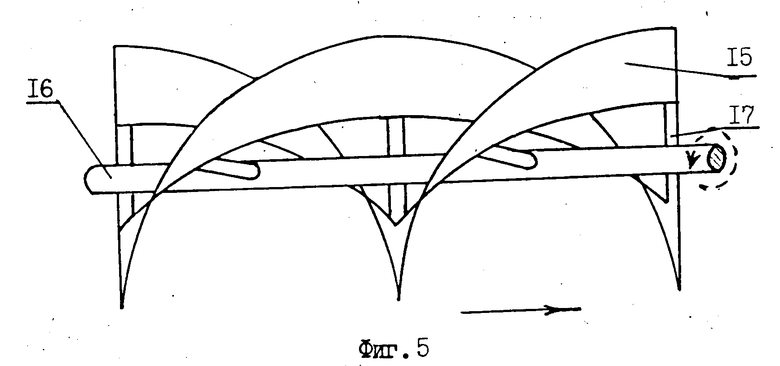
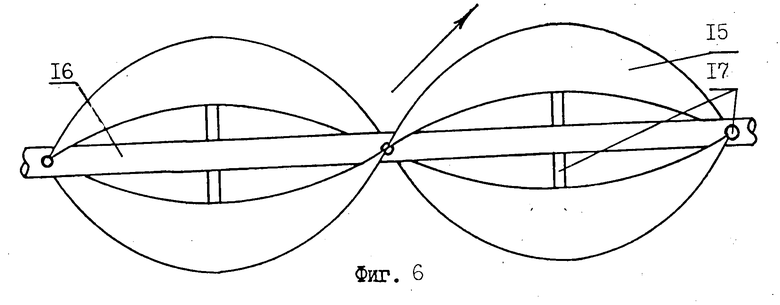
Многопозиционный 2-х или более лопастной движитель (фиг. 5 и 6) может быть выполнен в виде спиральной ленты 15, которая представляет собой как бы соединенные краями лопасти движителя, закрепленные на определенном расстоянии от гребного вала 16 на стойках 13.
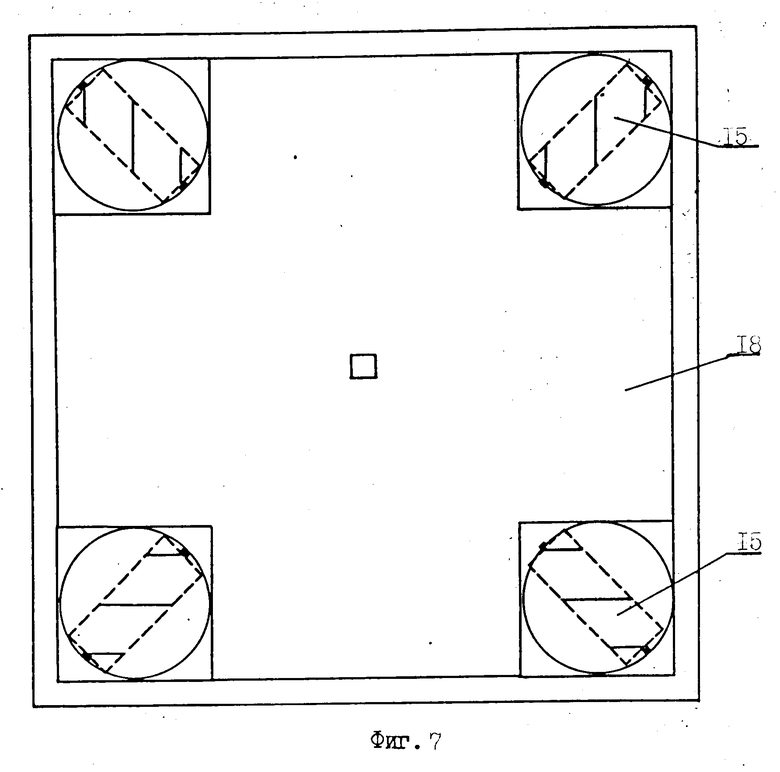
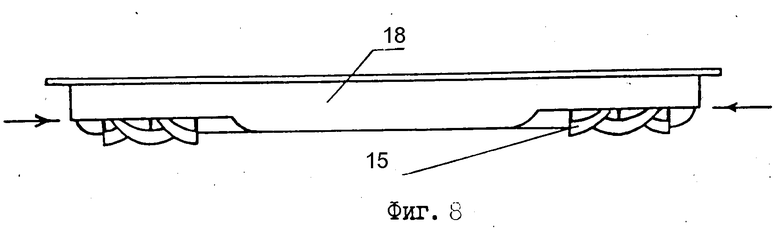
Многопозиционные лопастные движители 17 (фиг.7 и 8) могут располагаться на гидротехнических платформах 18.
Они также могут использоваться на всепогодных самоходных аэродромах, плавучих заводах, в сверхмощных буксирах, в бесплотинных ГЭС и т.д.
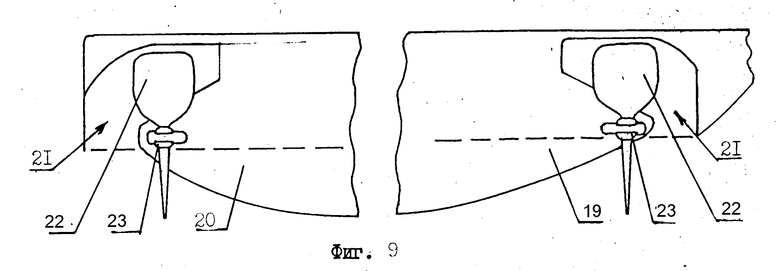
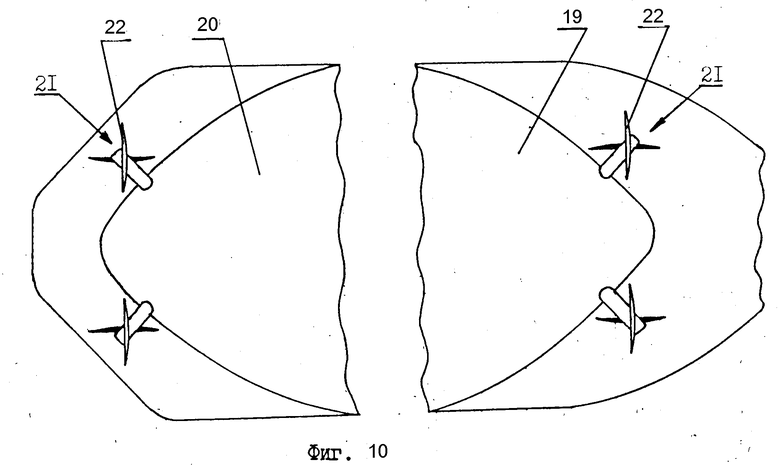
На фиг. 9 и фиг.10 показаны носовая 19 и кормовая 20 части водоизмещающего судна 21, которое оснащено четырьмя монопозиционными двухлопастными движителями 2, лопасти 22, которых выполнены поворотными и наклоняющимися с помощью известных механизмов 23 поворота и наклона.
Такая конструкция движителя может быть использована супертанкерах, траулерах и т.п.
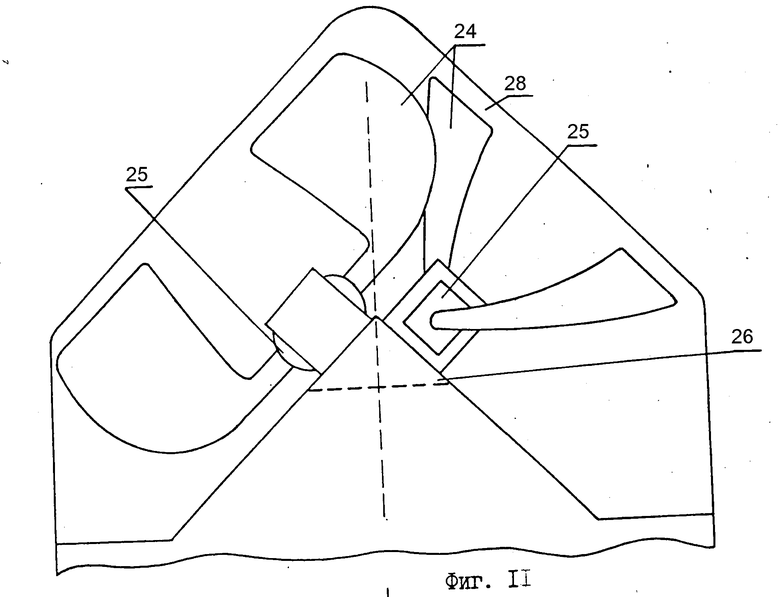
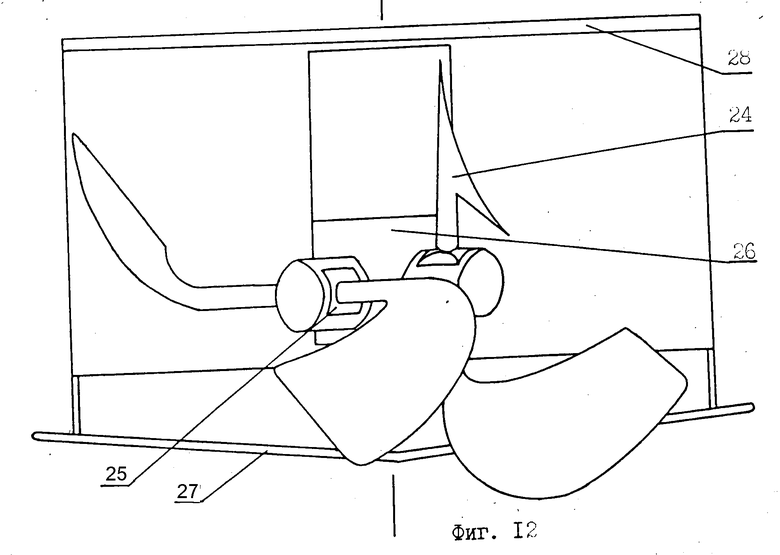
При незначительной ширине корпуса судна, например, судна на подводных крыльях, могут быть использованы два соосно расположенных и одновременно вращающихся в разные стороны винта фиг.11 (вид снизу) и фиг. 12 вид сзади), содержащих саблевидные гребные лопасти 24, механизм 25 поворота и наклона лопастей 24, механизм 26 подъема и опускания движителей, служащий для оптимального заглубления лопастей 24 в воду при выходе судна на подводные крылья 27. Сверху движители защищены козырьком 28.
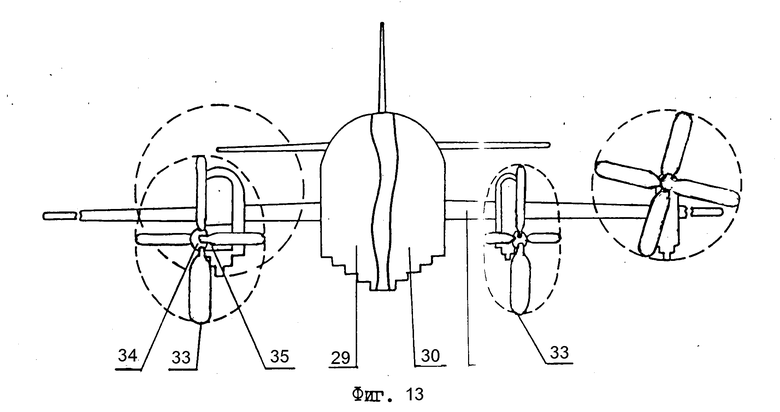
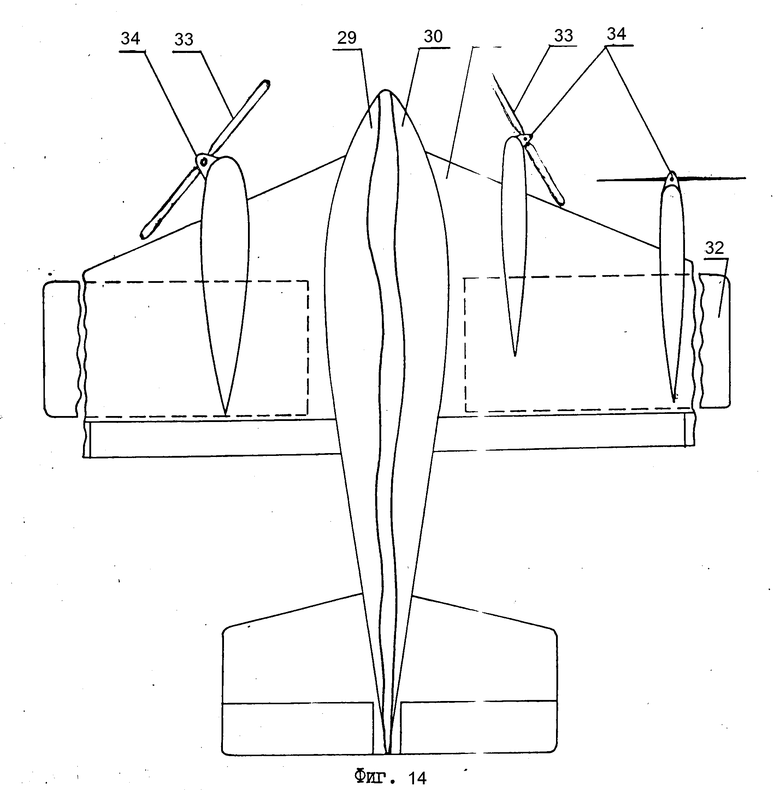
Движители согласно изобретению могут быть выполнены в виде обычных воздушных винтов (фиг.13, вид спереди) и фиг. 14 (вид снизу).
Такие винты могут быть установлены на судах аэранопланоходах, выполненных в виде двухмоторных 29, четырехмоторных 30 и многомоторных конструкций с обычными крыльями 31 и дополнительных выдвигающимися крыльями 32.
В таких конструкциях движителей гребные лопасти 33 смонтированы в поворотных головках 34 гребного вала, которые с помощью механизма 35 подъема и опускания могут быть установлены на необходимой для экранопланохода высоте при трогании с места, глиссировании, выходе на воздушную подушку и взлете.
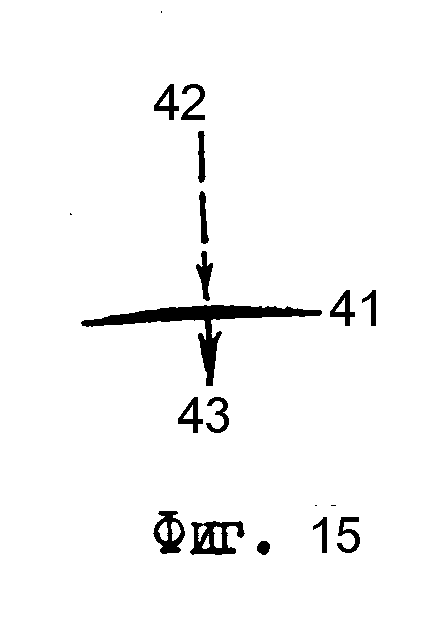
Величина тягового усилия при перемещении гребной лопасти в вводе зависит от угла направления движения гребной лопасти к поперечной вертикальной плоскости судна.
Если рассматривать отдельную гребную лопасть 41(фиг.15) при ее движении в направлении пунктирной стрелки 42 (лопасть 41 при этом отталкивает воду), то длиной стрелки 43, в направлении которой происходит отбрасывание воды, можно отобразить силу отбрасывания воды и ее направление.
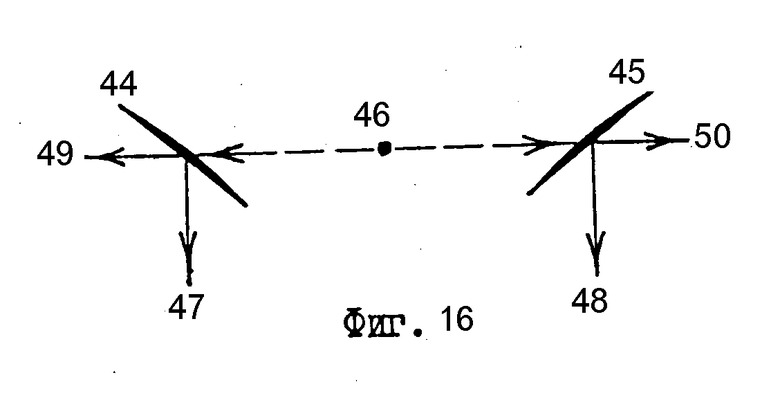
Эффект действия двух гребных лопастей 44 и 45 (фиг.16) при вращении винта вокруг своей оси, которые от общей точки 46 расходятся в воде в разные стороны, отображается сплошными стрелками 47 и 48, указывающими направление и силу отбрасывания воды (в конечном итоге это суммарное тяговое усилие движителя), а стрелками 49 и 50 направление и сила одновременно с отбрасыванием воды, закручивание и разбрасывание воды в стороны, в итоге силы 49 и 50 это потери на разбрасывание и закручивание воды, которые значительны у традиционных винтов и практически отсутствуют у движителей согласно изобретению.
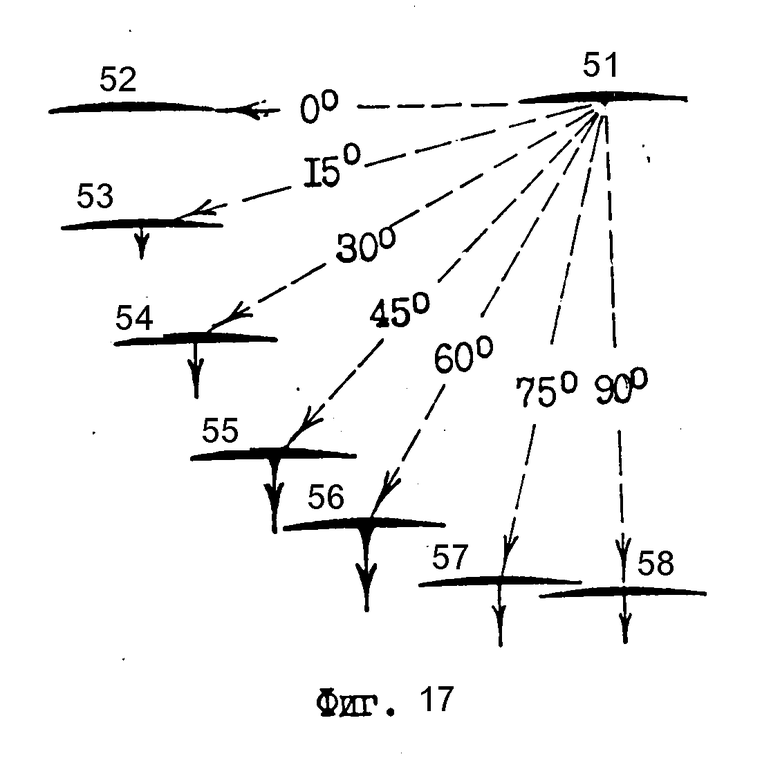
Величина тяговых усилий при изменении направления движения гребных лопастей движителя, согласно изобретению в воде под углами к поперечной плоскости судна от 0o до 90o (фиг.17) зависят от величины этих углов следующим образом: при перемещении лопасти из положения 51 в положение 52 (в поперечной плоскости) тяговое усилие не возникает, появляется оно только при перемещении лопасти под углом к позиции 51 в позиции 53,58. В одной из конструкций при движении движителя лопасти под углом 15o тяговое усилие от максимума в швартовом режиме составляет 37% при 30o-68% при 45o-91% при 60o99% при 75o-81% и при 90o-55%
Приведенные данные взяты из полученного экспериментального графика зависимости в швартовом режиме тягового усилия, выраженного в процентах, от направления перемещения гребных лопастей по отношению к поперечной вертикальной плоскости судна (фиг.18).
Особенностью движителя согласно изобретению является и то, что он может выполнять функцию "активного руля" при повороте лопастей.
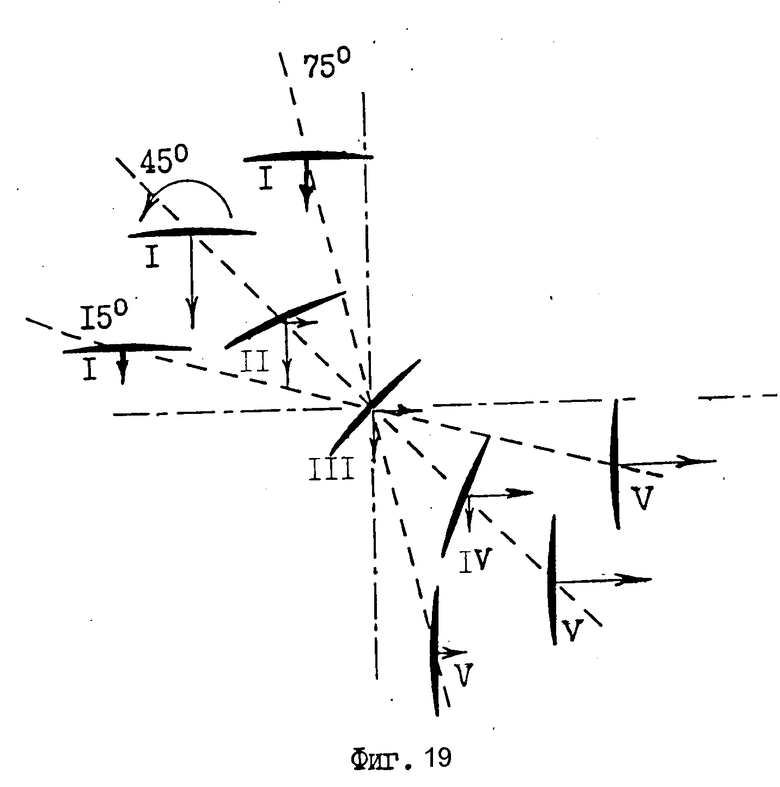
Величины боковых составляющих тяговых поворачивающих корму и/или нос усилий изменяются при разных установках гребной лопасти (фиг.19). Но это будет иметь место только при поворотах лопастей против часовой стрелки и только у носового правого и кормового левого движителя при перемещении лопастей в направлении пунктирных линий с позиции 1 к позиции V из левой верхней четверти в правую нижнюю
При таком перемещении поворачиваемых, в плоскости чертежа против часовой стрелки в пределах 0o.90o, лопастей кормовая и/или носовая с части судна будут сдвигаться справа налево.
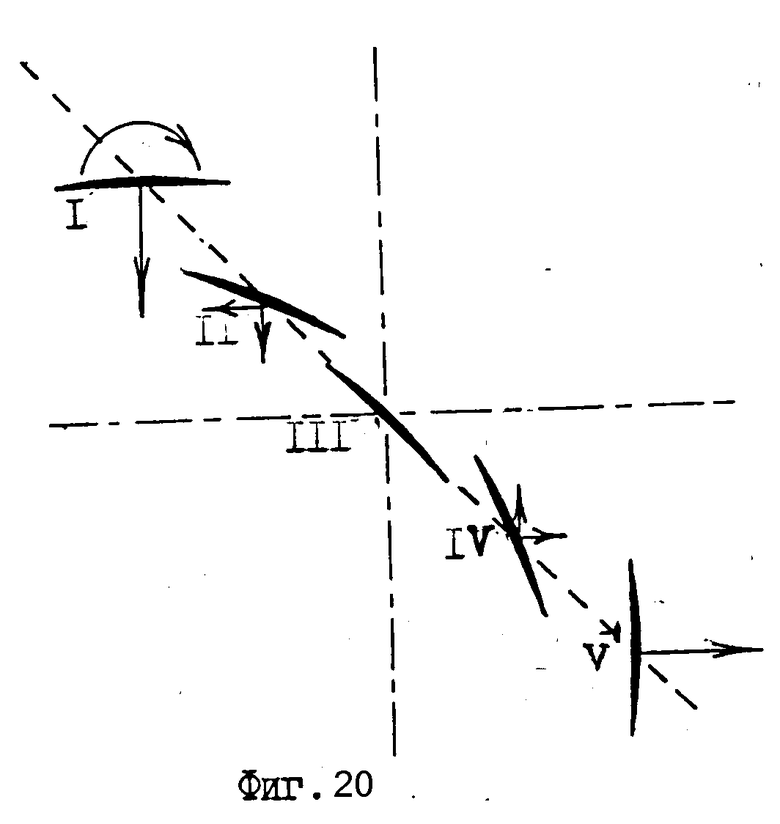
При повороте лопастей в плоскости чертежа по часовой стрелке (фиг.20) тяговые усилия сначала снижаются (позиция II) и исчезают вовсе (позиция III), а в некоторых положениях лопастей (позиция IV) появляются даже тормозящие эффекты и обратные боковые составляющие.
Работает движитель согласно изобретению следующим образом. Гребной вал устанавливают в выбранном положении, например, под углом 45o к продольной вертикальной плоскости, а гребные лопасти погружают в воду на 2/3 их высоты и устанавливают перед началом вращения в позицию 51 (фиг.17).
С начала вращения гребного вала в направлении позиции 55 на нем возникает тяговое усилие, так как вода начинает отбрасываться в направлении сплошной стрелки. Гребная лопасть в процессе движения отталкивается от воды и одновременно проскальзывает вдоль фронта давления.
Так как гребная лопасть описанным образом перемещается в процессе вращения вокруг гребного вала только в нижем положении, а во время входа в воду и выхода из нее занимает наклонные положения к вертикали, то практически во всех случаях в первой половине гребка лопасть частично вталкивает воду в глубину, а во второй поднимает ее вверх. Но вследствие того, что в воде постоянно находится следующая лопасть, выбрасывание воды вверх не происходит. При движении выходящая из воды лопасть в дополнение к этому, как бы выскальзывает из нее.
При наклоне осевого вала к горизонту, например, на +30o или -30o (фиг. 1), при вращении винта возникает подъемная или притапливающая сила, а при поворотах гребных лопастей в ту или иную сторону от поперечной вертикальной плоскости судна в положение позиций I.V (фиг.19) возникает тяговое усилие, которое разворачивает судно (корму, нос) в ту или иную сторону.
Чем больше гребных лопастей размещено на одном гребном валу (фиг.3, 4) или чем длиннее движитель ленточного типа (фиг. 5, 6), тем выше тяговые усилия при прочих равных условиях.
Аналогично работают движители согласно изобретению и на экранопланоходах (фиг.13, 14). При наборе скорости во время глиссирования и движения на аэродинамической воздушной подушке валы движителей размещаются под углом к продольной вертикальной плоскости экранопланохода и лопасти описывают при виде спереди (сзади) элипсы, которые очерчены пунктирами (фиг.13). После набора скорости перед взлетом экранопланохода при двухмоторном варианте валы все ближе размещаются к продольной вертикальной плоскости, а гребные лопасти все больше и больше подходя к поперечной вертикальной плоскости. При установке гребного вала параллельно продольной оси и резком увеличении числа оборотов двигателей (для сокращения тенденции набора скорости в процессе уменьшения поступи винта) и происходит взлет двухмоторного экранопланохода.
У четырехмоторного экранопланохода может быть и такой вариант взлета, когда два внутренних движителя еще отталкиваются от воды (фиг. 13), а два внешних подняты из воды и уже отталкиваются от воздуха.
Ленточные движители работают аналогично описанным выше лопастным. Разница между ними лишь в том, что у них отсутствуют промежутки между гребными лопастями, при вращении гребного вала в направлении пунктирной стрелки (фиг. 5) вода отбрасывается в направлении, показанном сплошной стрелкой, сообщая судну движение в противоположном направлении.
Ленточные движители, смонтированные на гидротехнических платформах (фиг. 6 и 8), позволяют совершать любые маневры (движение вперед, назад, в любую сторону и вращение).
Движители согласно изобретению могут быть использованы на гидротехнических платформах, бесплотинных гидроэлектростанциях, а также на водоизмещающих и высокоскоростных (200.400 км/ч), морских и речных судах. Они также могут быть использованы в подвесных лодочных двигателях и в качестве воздушного винта на экраноходах и экранопланоходах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой движетель | 1970 |
|
SU535186A1 |
| СУДОВОЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 2000 |
|
RU2175297C1 |
| УНИВЕРСАЛЬНОЕ ПОЛУПОГРУЖНОЕ КРУПНОТОННАЖНОЕ ТРАНСПОРТНОЕ СУДНО ДЛЯ ПЛАВАНИЯ В МОРЯХ С ЛЕДОВЫМ ПОКРОВОМ И НА ЧИСТОЙ ВОДЕ | 2015 |
|
RU2585199C1 |
| ДВИЖИТЕЛЬНАЯ УСТАНОВКА СУДНА | 2015 |
|
RU2598697C1 |
| Морская полупогружная платформа | 1990 |
|
SU1705180A1 |
| СУДОВОЕ ГРЕБНОЕ КОЛЕСО "ВАСЯ" | 1991 |
|
RU2123452C1 |
| МЕЛКОСИДЯЩЕЕ СУДНО С ЛОПАСТНЫМИ КОЛЁСАМИ | 2016 |
|
RU2624375C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДВУХВАЛЬНОГО СУДНА | 1994 |
|
RU2089442C1 |
| СПОСОБ ДВИЖЕНИЯ И МАНЕВРИРОВАНИЯ СУДНА И ЛОПАСТНЫЙ ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС | 1994 |
|
RU2098316C1 |
| Судовой движитель | 1988 |
|
SU1595740A1 |

Использование: судостроение, судовые полупогружные движители. Сущность изобретения: в движителе, содержащем гребной вал, размещенный под углом к продольной вертикальной плоскости судна, и полупогружные лопасти, гребной вал смонтирован так, что его положение по отношению к корпусу судна может быть изменено как на стоянке, так и на ходу. Гребные лопасти имеют такую форму, что при вхождении в воду нагнетающая сторона располагается перпендикулярно продольной вертикальной плоскости судна. Гребные лопасти могут изменять положение по отношению к продольной вертикальной плоскости и к основной плоскости судна или одновременно по отношению к обеим плоскостям, таким образом повышая скорость, маневренность, экономические показатели и обеспечивая более высокую степень безопасности. 5 з.п. ф-лы, 20 ил.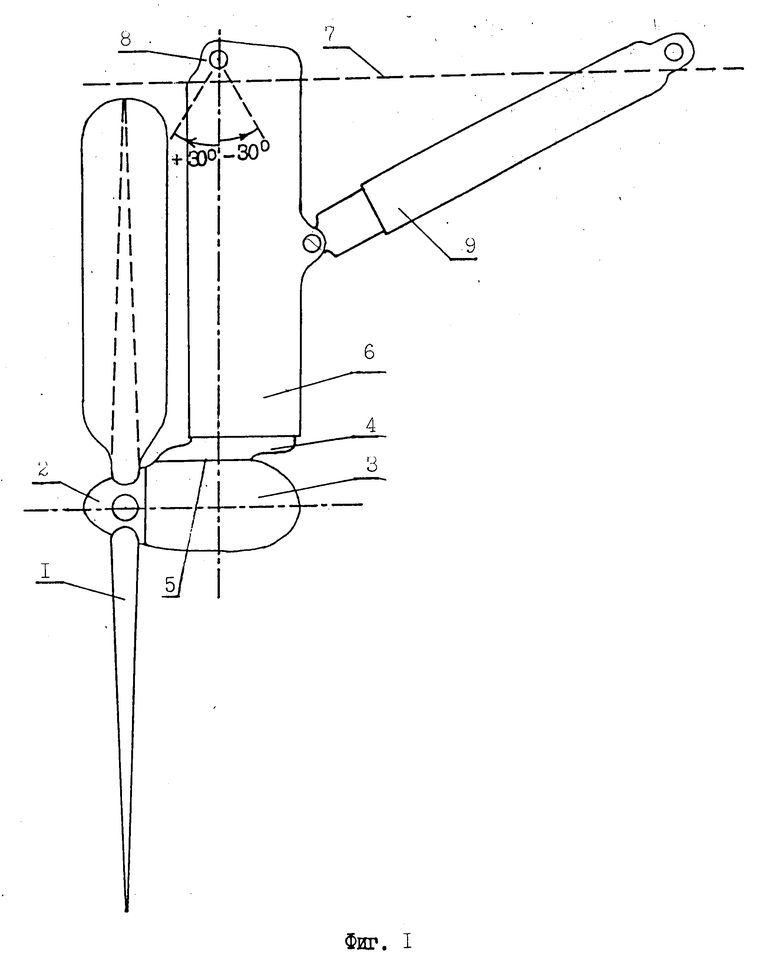
| GB, патент, 1138861, кл.B 60V 1/14, 1969. |
