Изобретение относится к области радиолокации и может быть использовано в радиолокаторах поиска и слежения. Известно устройство определения направления, входящее в состав радиолокатора, изложенное в патенте №2161807. В нем осуществляется определение направления, в том числе и при увеличенной частоте излучения зондирующих импульсов, используя моноимпульсную обработку сигналов. При этом количество приемных устройств должно быть не менее двух. И каждое приемное устройство имеет увеличенное поле зрения. Направление также может быть определено с помощью одного приемного устройства, используя анализ максимума огибающей сигналов. Однако при увеличенной дальности обнаружения и скорости обзора точность измерения уменьшается.
Известно устройство определения направления, входящее в состав радиолокатора, изложенное автором в патенте №2337377. В нем направление также может быть определено и с помощью одного приемного устройства с увеличенным полем зрения. Но в отличие от вышеупомянутого код направления поступает в постоянное запоминающее устройство, где зашиты выбранные направления. При этом выбирается то направление, которое наиболее близко подходит к зашитому направлению. Далее выбранный код направления поступает в вычитатель, и разность отображается на индикаторе. В состав устройства может входить и датчик поворота луча, но при увеличенной скорости обзора точность измерения угловых координат уменьшается. С помощью предлагаемого устройства увеличивается точность измерения угловых координат. Достигается это введением блока определения двух амплитуд, равноотстоящих от максимальной, вычитателя, следующих друг за другом, кодов и блока параллельных линий задержек.
При этом выход приемного устройства с увеличенным полем зрения соединен с входом блока определения двух амплитуд, равноотстоящих от максимальной, имеющего группу выходов, соединенную через вычитатель следующих друг за другом кодов с группой входов постоянного запоминающего устройства, а группа выходов датчика поворота луча соединена через блок параллельных линий задержек со второй группой входов вычитателя.
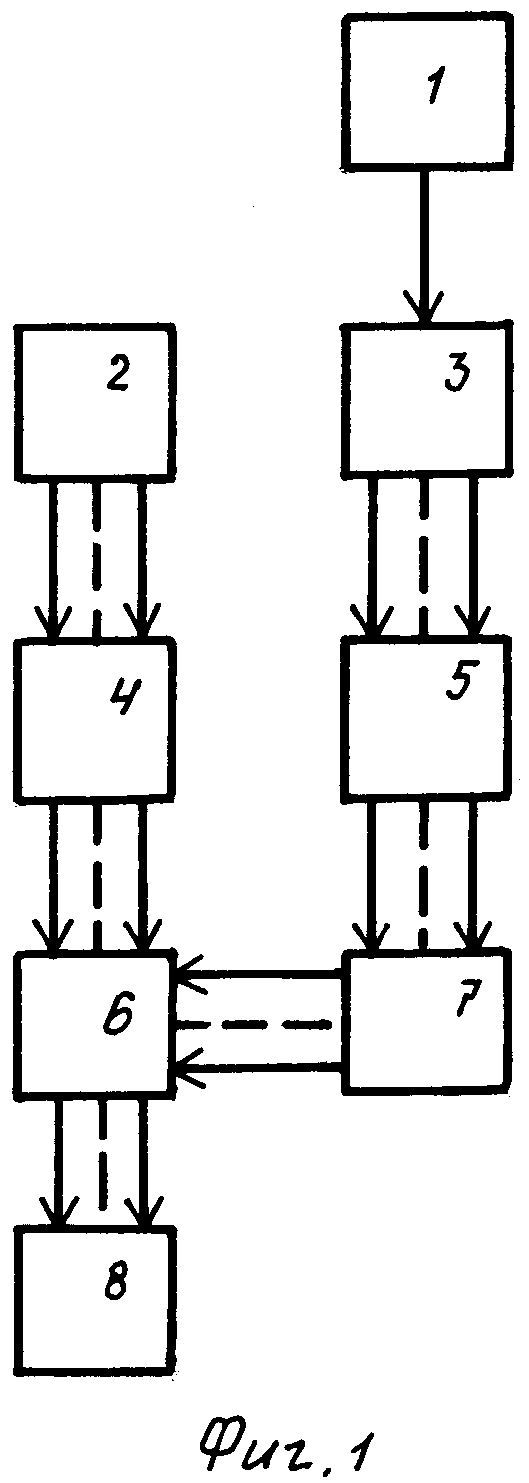
На фиг.1 и в тексте приняты следующие обозначения:
1 - приемное устройство с увеличенным полем зрения;
2 - датчик поворота луча;
3 - блок определения двух амплитуд, равноотстоящих от максимальной;
4 - блок параллельных линий задержек;
5 - вычитатель следующих друг за другом кодов;
6 - вычитатель;
7 - постоянное запоминающее устройство;
8 - индикатор.
При этом группа выходов постоянного запоминающего устройства 7 соединена с первой группой входов вычитателя 6, группа выходов которого соединена с группой входов индикатора 8, к тому же выход приемного устройства с увеличенным полем зрения 1 соединен с входом блока определения двух амплитуд, равноотстоящих от максимальной 3, имеющего группу выходов, соединенную через вычитатель следующих друг за другом кодов 5 с группой входов постоянного запоминающего устройства 7, а группа выходов датчика поворота луча 2 соединена через блок параллельных линий задержек 4 с второй группой входов вычитателя 6.
Работа устройства осуществляется следующим образом.
Приемное устройство с увеличенным полем зрения 1 осуществляет прием отраженных от объектов электромагнитных сигналов в виде пачек импульсов в процессе обзора пространства и их преобразование в электрические сигналы, которые также выделяются по характеристикам, соответствующим ожидаемым объектам. С выхода приемного устройства 1, поле зрения которого увеличено по сравнению с передающим лучом, например, в два раза, выделенные следующие друг за другом сигналы, в том числе и с увеличенной частотой следования, поступают в блок определения двух амплитуд, равноотстоящих от максимальной 3. Последний определяет значения амплитуд сигналов огибающей, находящихся на равных интервалах от максимальной амплитуды. Это может быть осуществлено, например, так же как в анализаторе максимума огибающей, представленном в книге «Радиотехнические системы» Ю.М.Казаринова, 1990 г., М., стр.383, который может определять амплитуду максимального сигнала и выдавать ее в виде кода. Разница заключается лишь в том, что определяется не максимальная амплитуда, а две амплитуды, равноотстоящие от нее.
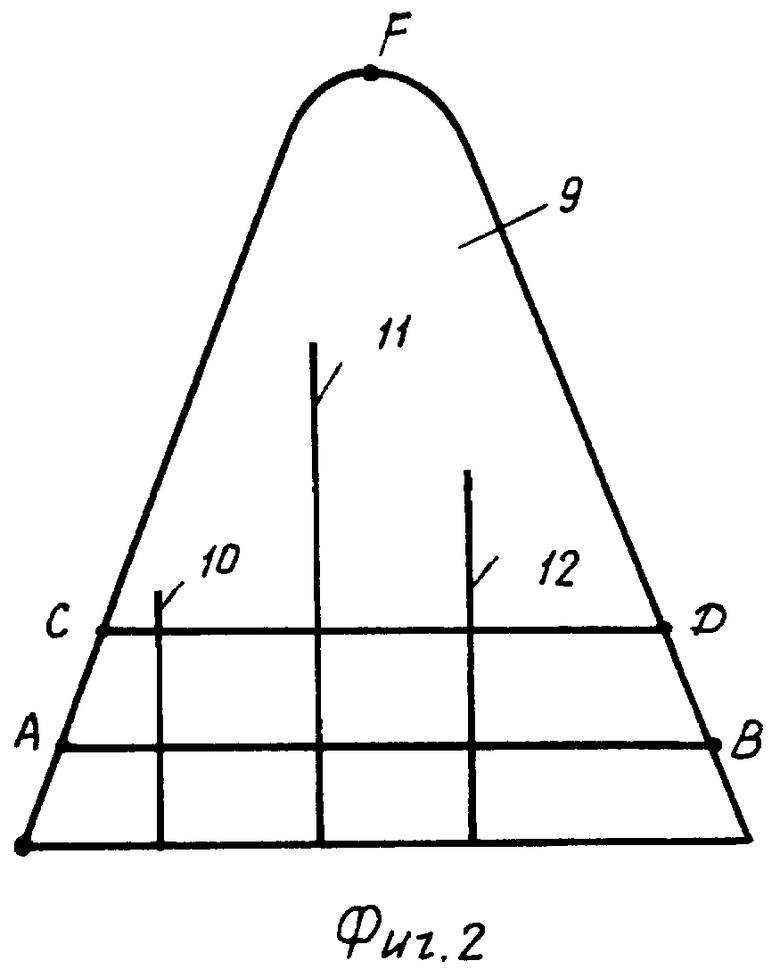
С группы выходов блока 3 коды, характеризующие амплитуды, поступают в вычитатель следующих друг за другом кодов 5, где осуществляется вычитание этих кодов. Разность с группы выходов вычитателя будет характеризовать угловое положение объекта относительно центральной оси приемной диаграммы. При этом независимо от величины амплитуд их разность будет иметь постоянные значения для одних и тех же угловых направлений. Для пояснения воспользуемся фиг. 2, где показаны следующие обозначения: 9 - приемная диаграмма направленности, 11-максимальная амплитуда, 10, 12 - амплитуды, равноотстоящие от максимальной. Амплитуда 12 превышает амплитуду 10, так как за время вращения приемной диаграммы 9 синхронно с передающим лучом она сместится на величину, пропорциональную дальности, и амплитуда 12 станет ближе к максимуму в точке F диаграммы, а амплитуда 10 станет дальше от максимума. Проведем два параллельных отрезка АВ и CD, пересекающие приемную диаграмму 9. Пусть объект, находящийся на одном и том же направлении, удалится на определенное расстояние. Тогда до удаления объекта диаграмма будет характеризоваться фигурой AFB, а после удаления объекта - фигурой CFD. Однако до удаления и после удаления объекта разность амплитуд 12 и 10 не изменится.
С группы выходов блока 5 информация поступает в постоянное запоминающее устройство 7, где к каждой из групп разностей, характеризующих угловые положения объекта относительно центральной оси приемной диаграммы, подшиваются определенные угловые значения внутри этой диаграммы. Причем количество угловых значений зависит от разрешающей способности по направлению. Выбранное угловое значение поступает с группы выходов постоянного запоминающего устройства 7 на первую группу входов вычитателя 6, на вторую группу входов которого приходит информация о положении центральной оси передающего луча, в момент прихода в приемное устройство 1 максимальной амплитуды в пачке отраженных сигналов. Эта угловая информация поступает с датчика поворота луча 2 через блок параллельных линий задержек. Пример конкретного исполнения датчика поворота луча представлен в вышеупомянутой книге «Радиотехнические системы» Ю.М.Казаринова, М., 1990 г., стр.414. Величина задержки кода в блоке 4 равна времени между двумя импульсами в пачке, в частности между максимальным импульсом и последующим импульсом, поступающим в вычитатель следующих друг за другом кодов 5 плюс время на обработку информации в вычитателе 5. Так как приемная диаграмма синхронно вращается с передающим лучом, то разность с группы выходов вычитателя 6 будет характеризовать направление на объект, которое и отображается на индикаторе 8.
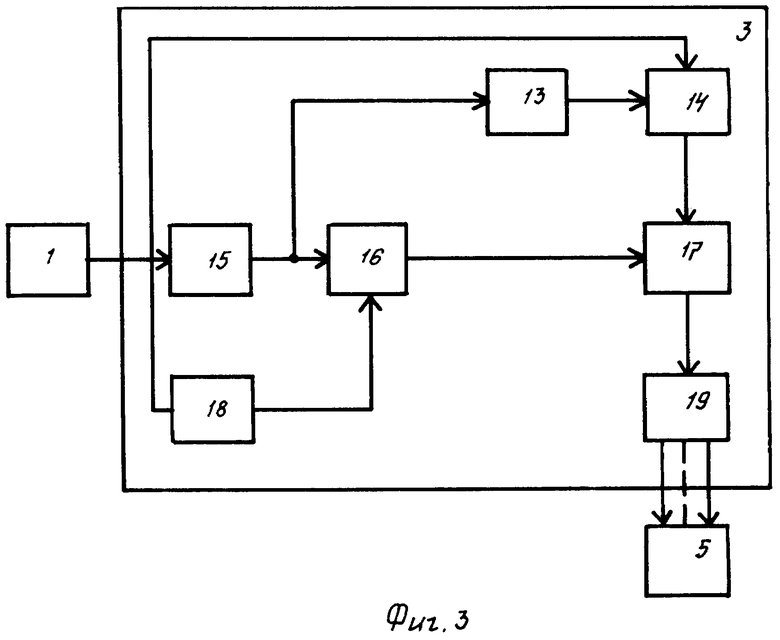
Исполнение блока определения двух амплитуд, равноотстоящих от максимальной 3, может быть осуществлено так, как показано на фиг.3, где приняты следующие обозначения:
13 - линия задержки;
14 - элемент совпадения;
15 - блок фиксации максимальной амплитуды;
16 - элемент совпадения;
17 - элемент или,
18 - линия задержки;
19 - блок преобразования амплитуды в код.
Работа его осуществляется следующим образом.
Блок фиксации максимальной амплитуды 15 в результате анализа огибающей выдает сигнал прихода этой амплитуды с приемника 1 элементу совпадения 16, разрешая прохождение через него сигнала, с этого приемника, предварительно задержанного с помощью линии задержки 18, через элемент или 17 в блок преобразования амплитуды в код 19, величина линии задержки 18 равна определенному количеству периодов следования импульсов. Блок 15 также выдает сигнал через линию задержки 13 элементу совпадения 14, разрешая прохождение через него сигнала с приемника 1, через элемент или 17 в вышеупомянутый блок преобразования амплитуды в код. Величины линий задержек 13 и 18 подбираются таким образом, чтобы временное рассогласование между первым и максимальным сигналами и между максимальным и вторым сигналами были равны. Блок преобразования амплитуды в код 19 преобразует амплитуды в коды, которые последовательно поступают в вычитатель следующих друг за другом кодов 5.
Устройство обеспечивает сохранение точности определения направления при наличии одного приемного канала, в том числе при увеличенных дальностях и скоростях обзора. Это дает возможность использовать устройство и для определения дальности при увеличенных частотах излучения зондирующих импульсов, если заранее известны направления излучения импульсов.
Таким образом, предлагаемое устройство увеличивает тактико-технические характеристики радиолокаторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2247408C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1999 |
|
RU2168739C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2402039C2 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
Изобретение может быть использовано в радиолокаторах поиска и слежения. Достигаемый технический результат - увеличение точности измерения угловых координат. Указанный результат достигается благодаря введению блока параллельных линий задержек, блока определения двух амплитуд, равноотстоящих от максимальной, и вычитателя следующих друг за другом кодов, при этом выход приемного устройства с увеличенным полем зрения соединен с входом блока определения двух амплитуд, равноотстоящих от максимальной, имеющего группу выходов, соединенную через вычитатель следующих друг за другом кодов с группой входов постоянного запоминающего устройства, а группа выходов датчика поворота луча соединена через блок параллельных линий задержек со второй группой входов вычитателя. 3 ил.
Устройство определения направления, состоящее из приемного устройства с увеличенным полем зрения, постоянного запоминающего устройства, датчика поворота луча, вычитателя и индикатора, где группа выходов постоянного запоминающего устройства соединена с первой группой входов вычитателя, группа выходов которого соединена с группой входов индикатора, отличающееся тем, что введены блок параллельных линий задержек, блок определения двух амплитуд, равноотстоящих от максимальной, и вычитатель следующих друг за другом кодов, при этом выход приемного устройства с увеличенным полем зрения соединен с входом блока определения двух амплитуд, равноотстоящих от максимальной, имеющего группу выходов, соединенную через вычитатель следующих друг за другом кодов с группой входов постоянного запоминающего устройства, а группа выходов датчика поворота луча соединена через блок параллельных линий задержек со второй группой входов вычитателя.
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 1996 |
|
RU2096796C1 |
| УСТРОЙСТВО ПОИСКА ОБЪЕКТОВ | 1999 |
|
RU2162234C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА | 2011 |
|
RU2459218C1 |
| US 4584584 А, 22.04.1986 | |||
| US 6437742 B1, 20.08.2002 | |||
| US 4292635 А, 29.09.1981. | |||

