Изобретение относится к области радиолокации и макет быть использовано в системах поиска и слежения за воздушными объектами.
Известно устройство обработки радиолокационных сигналов, изложенное в книге "Радиотехнические системы" Ю.М.Казаринов, 1991 г., Москва, стр. 383. В нем с помощью анализа максимума огибающей осуществляется определение направления на объект при использовании одноканального приемника с вращающейся диаграммой направленности. Однако при увеличении скорости обзора может быть принято два или один сигнал, который может быть и удлиненный. при этом точность определения направления уменьшается.
Известно устройство обработки радиолокационных сигналов, входящее в состав радиолокатора, изложенного в вышеупомянутом источнике на стр. 194-197, В нем после выделения сигналов от объектов в одноканальном приемнике с вращающейся диаграммой направленности может происходить, так же как показано в вышеупомянутом аналоге, определение максимума огибающей в процессе первичной обработки. Это может осуществляться благодаря определению амплитуд сигналов с помощью блока преобразования амплитуды в код. Угловое положение, соответствующее максимуму огибающей вместе с кодом азимута с датчика азимута поступает в блок вторичной обработки, где осуществляется построение траекторий движения объекта. Однако при увеличении скорости обзора может быть принято два или один сигнал, который может быть и удлиненный. При этом точность определения направления уменьшается.
С помощью предлагаемого устройства увеличивается точность определения направления при наличии двух или одного удлиненного сигнала.
Достигается это введением блока параллельных линий задержек, вычитателя, шифратора и сумматора, при этом группа выходов блока преобразования амплитуды в код соединена с второй группой входов вычитателя и через блок параллельных линий задержек соединена с первой группой входов вычитателя, имеющего группу выходов, соединенную через шифратор с первой группой входов сумматора, вторая группа входов которого и группа выходов соответственно соединена с группой выходов датчика азимута и с второй группой входов блока вторичной обработки.
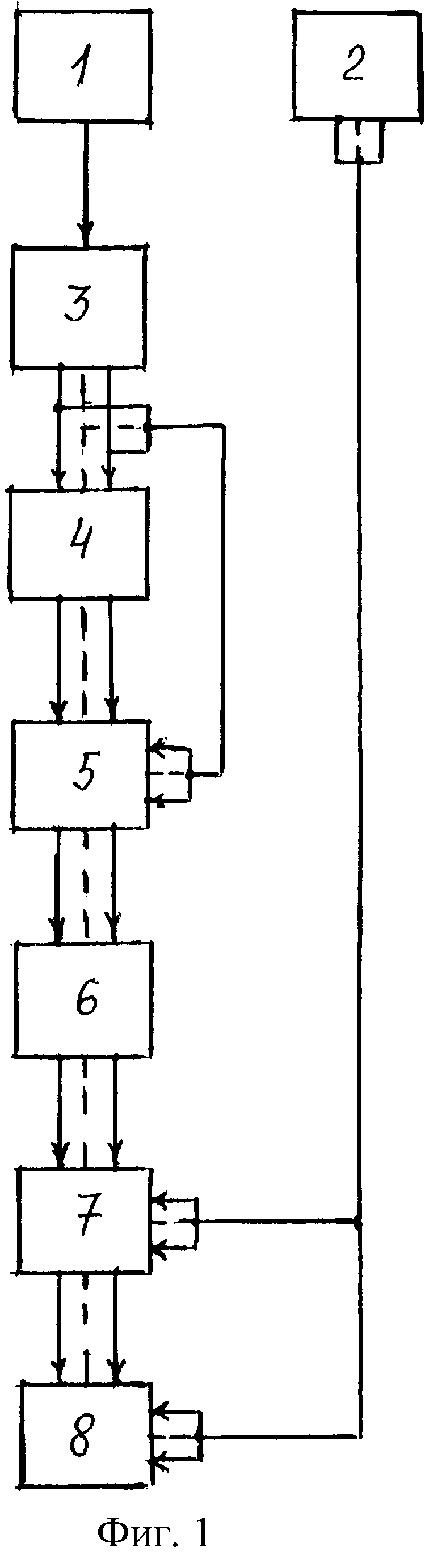
На фиг.1 и в тексте приняты следующие обозначения:
1 - приемник с вращающейся диаграммой направленности;
2 - датчик азимута;
3 - блок преобразования амплитуды в код;
4 - блок паралельных линий задержек;
5 - вычитатель;
6 - шифратор;
7 - сумматор;
8 - блок вторичной обработки,
при этом выход приемника с вращающейся диаграммой направленности 1 соединен с отдельным входом блока преобразования амплитуда в код 3, имеющего группу выходов, соединенную с второй группой входов вычитателя 5 и через блок паралельных линий задержек 4, соединенную с первой группой входов вычитателя 5, имеющего группу выходов, соединенную через шифратор 6 с первой группой входов сумматора 7, вторая группа входов которого и группа выходов соответственно соединены с группой выходов датчика азимута 2 и второй группой входов блока вторичной обработки 8, имеющей первую группу входов, соединенную с вышеупомянутой группой выходов датчика азимута 2.
Работа устройства заключается в следующем.
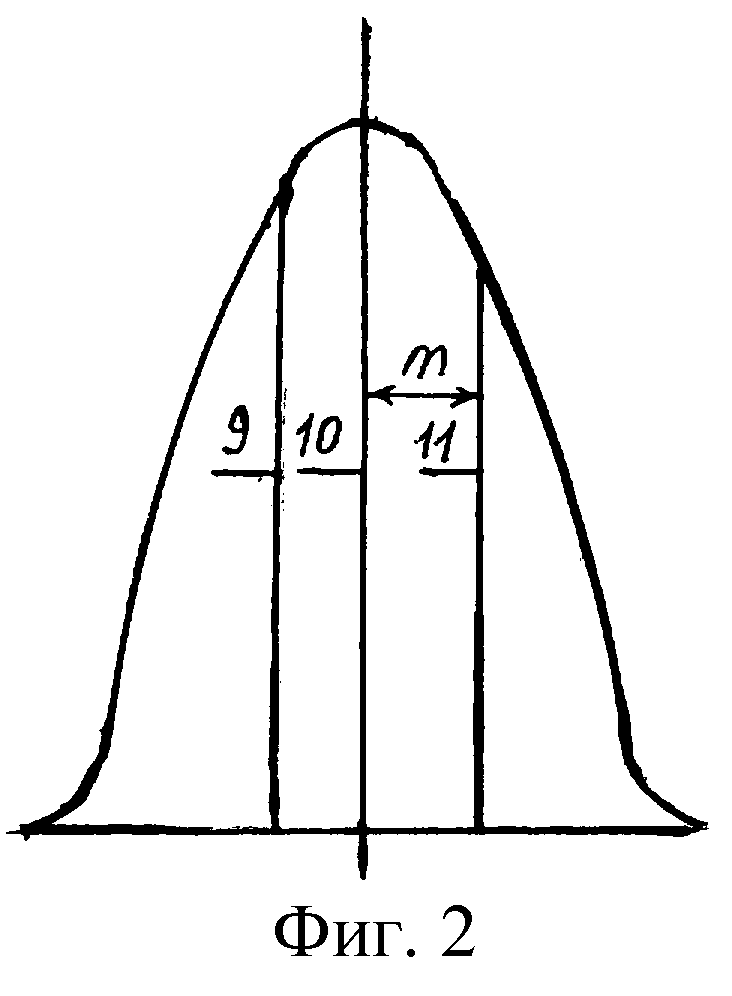
В приемнике с вращающейся диаграммой направленности 1 осуществляется преобразование электромагнитных сигналов в электрические и выделение их по характеристикам, соответствующим воздушным объектам. Выделенные сигналы поступают в блок преобразования амплитуды в код 3, где осуществляется преобразование амплитуды в код, который далее поступает на вторую группу входов вычитателя 5 и через блок параллельных линий задержек 4 поступает на первую группу входов этого вячитателя. Величина каждой линии задержки равна, например, максимальному времени запаздывания отраженного сигнала или времени, равному определению длительности удлиненного сигнала, если он одиночный, а количество линий задержек равно величине разрядов параллельного кода. Разность от вычитания кодов амплитуд поступает в шифратор 6, который определяет угловое положение объекта в поле зрения приемника с вращающейся диаграммой направленности 1. Величина этого углового положения складывается с текущим значением кода азимута с датчика азимута 2 в сумматоре 7, и истинное значение направления на объект поступает в блок вторичной обработки 8, осуществляющий построение траектории движения объектов. Код азимута также поступает на первую группу входов блока вторичной обработки для его использования при наличии других устройств. Исполнение датчика азимута с угловым разрешением, например одна минута, выдающего информацию в виде кода, представлено в вышеупомянутом источнике на стр. 414. Для более подробного пояснения принципа определения направления с помощью одноканального приемника воспользуемся огибающей, представленной на фиг.2, где приняты следующие обозначения:
9 - первая амплитуда;
10 - линия, проходящая через максимум диаграммы направленности приемника;
11 - вторая амплитуда.
Рассмотрим два варианта исполнения.
Первый вариант, когда за время пересечения объекта диаграммой направленности приемника 1 отражается один сигнал, а при втором варианте за это же время пересечения отражаются два сигнала.
В первом варианте сигналы могут быть удлиненные и каждый может занимать часть площади огибающей, а именно участок, ограниченный амплитудами 9 и 11.
При втором варианте примем условно, что укороченные сигналы занимают то же положение внутри огибающих на фиг.2. В обоих вариантах величина параллельных линий задержек в блоке 4 соответствует длине отрезка а-в.
Как видно из фиг.2, каждой разности амплитуд, определяемой в вычитателе 5, будет соответствовать определенное положение внутри огибающей, а следовательно, и внутри диаграммы направленности приемника 1 относительно линии 10. Поэтому каждому положению соответствует строго определенное положение второй амплитуды 11 относительно линии 10, проходящей через максимум огибающей.
На фиг.2 это положение характеризуется отрезком m.
Удлиненный сигнал в первом варианте может быть использован и в радиолокаторах дальнего обнаружения. Таким образом, каждому значению разности амплитуд с выхода вычитателя 5 соответствует определенный код в шифраторе 6, характеризующий угловое положение второй амплитуды относительно равносигнальной вертикальной плоскости, разделяющее диаграмму направленности приемника на две равные части. Внутри этой плоскости и находится линия 10. Если амплитуда 11 находится справа от линии 10, это угловое положение будет положительным, а если слева - то отрицательным, и оно, как отмечалось ранее, складывается в сумматоре 7 с значением азимута равносигнальной вертикальной плоскости вращающейся диаграммы направленности приемника.
Как отмечалось в вышеупомянутом источнике на стр.383, от величины амплитуд сигналов зависит и максимальное значение огибающей. Однако разность двух амплитуд, ограничивающих один и тот же участок огибающей, не зависит от этого максимального значения, так как при укорочивании отрезков 9, 11 (см. фиг.2) их разность не меняется. Точность определения направления зависит при наличии двух сигналов от их флюктуации и может составлять значение, равное 0,05-0,15 ширины диаграммы. Приведем пример конкретного исполнения.
Пусть отраженные от объекта два сигнала имеют длительность 20 мкс и поступают в приемник в результате излучения двух зондирующих импульсов за время поворота совмещенных передающей и приемной диаграмм направленности на величину собственной ширины. Тогда при максимальной ширине диаграмм по азимуту в 2 градуса, по углу места в 30 градусов и дальности обнаружения 300 км время обзора составит 0,7 сек, а точность определения направления 6-18 минут.
Возможен другой вариант примера, когда принимается один удлиненный сигнал длительностью 2 мс, при максимальной дальности 1200 км. Тогда время кругового обзора составит 1,5 сек, а флюктуации не повлияют на точность определения направления, которая может составить 5 минут. Таким образом, увеличение точности определения направления при уменьшении времени обзора улучшает качество построения траекторий быстро сменяющихся объектов. Устройство можно использовать в системах определения высоты и системах секторного обзора в радиолокаторе по патенту 2161807, в том числе и с увеличенной частотой следования сигналов, где вместо двухканального приемника создается возможность применить одноканальный.
При этом более узкий скачкообразно вращающийся с помощью фазированной антенной решетки луч излучателя излучает два коротких или один удлиненный сигнал, который принимается приемником с синхронно непрерывно вращающейся более широкой диаграммой направленности, которая может быть повернута относительно узкой передающей диаграммы для уменьшения влияния местных предметов. При этом для определения дальности фиксируется направление прихода отраженного сигнала, совпадающее с направлением в момент его излучения.
Устройство можно использовать и в пассивных локаторах, где величина линий задержек должна подстраиваться в зависимости от характеристик сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2003 |
|
RU2232401C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| ДАЛЬНОМЕР | 2006 |
|
RU2327106C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| РАДИОЛОКАТОР | 1998 |
|
RU2161806C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТ ИОНОСФЕРЫ В ЗОНЕ ОБЗОРА | 2012 |
|
RU2510882C1 |
| РАДИОЛОКАТОР | 1994 |
|
RU2081429C1 |
Изобретение относится к области радиолокации и может быть использовано в системах поиска и слежения за воздушными объектами. Технический результат заключается в увеличении точности определения направления. Устройство состоит из приемника с вращающейся диаграммой направленности, датчика азимута, блока преобразования амплитуды в код и блока вторичной обработки, где выход приемника с вращающейся диаграммой направленности соединен с входом блока преобразования амплитуды в код и группа выходов датчика азимута соединена с группой входов блока вторичной обработки, причем дополнительно вводятся блок параллельных линий задержек, вычитатель, шифратор и сумматор, при этом группа выходов блока преобразования амплитуды в код соединена с второй группой входов вычитателя и через блок параллельных линий задержек соединена с первой группой входов вычитателя имеющего группу выходов, соединенную через шифратор с первой группой входов сумматора, вторая группа входов которого и группа выходов соответственно соединены с группой выходов датчика азимута и с второй группой входов блока вторичной обработки. 2 ил.
Устройство обработки радиолокационных сигналов, состоящее из приемника с вращающейся диаграммой направленности, датчика азимута, блока преобразования амплитуды в код и блока вторичной обработки, где выход приемника с вращающейся диаграммой направленности соединен с входом блока преобразования амплитуды в код и группа выходов датчика азимута соединена с группой входов блока вторичной обработки, отличающийся тем, что вводится блок параллельных линий задержек, вычитатель, шифратор и сумматор, при этом группа выходов блока преобразования амплитуды в код соединена с второй группой входов вычитателя и через блок параллельных линий задержек соединена с первой группой входов вычитателя, имеющего группу выходов, соединенную через шифратор с первой группой входов сумматора, вторая группа входов которого и группа выходов соответственно соединены с группой выходов датчика азимута и с второй группой входов блока вторичной обработки.
| Радиотехнические системы | |||
| Под ред | |||
| Ю.М | |||
| КАЗАРИНОВА | |||
| - М.: Высшая школа, 1990, с.194-197 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1997 |
|
RU2115139C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2149421C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 1996 |
|
RU2118835C1 |
| УСТРОЙСТВО ПОИСКА ОБЪЕКТОВ | 1992 |
|
RU2048687C1 |
| US 5132689 А, 21.07.1992 | |||
| US 5920278 А, 06.07.1999. | |||

