Изобретение относится к области радиолокации и может быть использовано в системах предупреждения столкновений.
Известно устройство обработки сигналов, описанное в книге Радиотехнические системы под редакцией Ю.М. Казаринова, 1990, стр. 194-197. В нем может выделяться в том числе и объект, движущийся встречным курсом. Однако для этого требуется определенное количество времени, равное нескольким оборотам антенны. Этого времени может оказаться недостаточно для принятия мер при внезапном появлении встречно движущегося объекта в ближней зоне обнаружения.
Известно устройство обработки локационных сигналов, описанное в вышеупомянутом источнике на стр. 262-265. В нем выделяется объект, движущийся встречным курсом за более короткое время. В состав устройства может входить преобразователь дальности и блок обработки. Однако обработка требует использования сложных узлов. В предлагаемом устройстве осуществляется выделение встречно движущегося объекта без использования сложных узлов и увеличения времени обработки.
Достигается это тем, что вводится в качестве преобразователя дальности устройство дискретного измерения времени радиолокационной станции по патенту N 2007742, а также вводится в блок обработки два блока параллельных линий задержек, вычитатель дальностей, вычитатель разности дальностей и дешифратор встречного курса, при этом групповой выход преобразователя дальности через групповой вход блока обработки соединен с первым групповым входом вычитателя дальности, и соединен через первый блок параллельных линий задержек с вторым групповым входом вычитателя дальности, групповой выход которого соединен с первым групповым входом вычитателя разности дальностей и соединен через второй блок параллельных линий задержек со вторым групповым входом вычитателя разности дальностей, групповой выход которого соединен с групповым входом дешифратора встречного курса.
На фиг. 1 представлена блок-схема устройства; на фиг. 1 и в тексте приняты следующие обозначения: 1 - преобразователь дальностей; 2 - блок обработки; 3 - блок параллельных линий задержек; 4 - вычитатель дальностей; 5 - блок параллельных линий задержек; 6 - вычитатель разностей дальностей; 7 - дешифратор встречного курса, при этом групповой выход преобразователя дальности 1 через групповой вход блока обработки 2 соединен с первым групповым входом вычитателя дальности 4 и соединен через блок параллельных линий задержек 3 с вторым групповым входом вычитателя дальности 4, групповой выход которого соединен с первым групповым входом вычитателя разностей дальностей 6 и соединен через блок параллельных линий задержек 5 со вторым групповым входом вычитателя разностей дальностей 6, групповой выход которого соединен с групповым входом дешифратора встречного курса 7.
Работа устройства осуществляется следующим образом. Преобразователь дальности 1, выполненный аналогично устройству дискретного измерения времени радиолокационной станции, патент N 2007742 - авторы Часовской А.А. и Янина Т.А., определяет в дискретном виде дальность с точностью, например, 10 см.
Обеспечение необходимых точностных характеристик не требует введение сложных обрабатывающих узлов в преобразователь дальности 1, который выдает информацию о дальности объектов в параллельном коде в блок обработки 2. Блок обработки 2, анализируя процесс изменения дальности, выделяет объекты, движущиеся встречным курсом, в том числе и внезапно появившиеся в ближней зоне. К таким объектам, кроме подвижных, могут относиться и неподвижные (птицы, участки земли и строений и т.д.). Блок обработки 2 состоит из блоков параллельных линий задержек 3 и 5, вычитателя дальности 4, вычитателя разностей дальностей 6 и дешифратора встречного курса 7. Блок обработки 2 работает следующим образом. Параллельный код, несущий в себе информацию о текущей дальности до объекта, с преобразователя дальности 1 поступает в блок параллельных линий задержек 3. Количество линий задержек равно дискретности параллельного кода. Величина задержки каждой линии задержки равна кратному числу временных рассогласований между следующими друг за другом зондирующими импульсами локатора. Если величина такого временного рассогласования равна, например 100 мкс, а величина задержки 10 мс, то кратное число временных рассогласований будет равно 100. За время же 10 мс объект, двигающийся встречным курсом, например, со скоростью 200 м/с, пройдет 2 м. С выхода блока параллельных линий задержек 3 задержанный код поступает в вычитатель дальности 4, на второй вход которого поступает текущий код дальности непосредственно с преобразователя дальности 1, который вычитается из задержанного. Таким образом, коды, одновременно поступающие в вычитатель дальности 4, принадлежат одному и тому же объекту. Параллельный код разности дальностей проходит через блок параллельных линий задержек 5, аналогичный вышеупомянутому блоку 3. Величины задержек блоков параллельных линий задержек 3 и 5 равны. С выхода блока параллельных линий задержек 5 код разностей дальностей поступает в вычитатель разностей дальностей 6, куда так же одновременно поступает текущий код разности дальностей от одного и того же объекта непосредственно с вычитателя дальности 4. В результате текущий код разности дальностей вычитается из задержанного. Код разности на выходе вычитателя разностей дальностей 6 характеризует изменение скорости объекта, движущегося встречным курсом. Если код равен нулю, то это означает, что радиальная скорость объекта не меняется, что означает, что он движется встречным курсом. Для вышеупомянутых примеров, то есть при величине задержек 10 мс, и скорости встречного объекта 200 мс, погрешность определения изменения скорости будет составлять 5%. Такой погрешности достаточно для выделения объектов, движущихся встречным курсом. С выхода вычитателя разностей дальностей 6 параллельный код поступает в дешифратор встречного курса 7, который выделяет код, равный нулю или близко к нему, исходя из конкретных условий применения. Если охраняемый объект имеет более протяженную форму, то выделяемый код в блоке 7 может несколько отличаться от нуля.
Приведем пример конкретного исполнения. Пусть встречно движущийся объект со скоростью 200 м/с обнаружен на расстоянии 1 км. Если принять время выделения встречно движущегося объекта равным tв = 50 мс, а время принятия мер к уклонению или к уничтожению объекта tу = 2,5 с, то в момент фактического уклонения или уничтожения встречно движущегося объекта охраняемый объект будет находиться от него на удалении So = 200-500 м, что достаточно для обеспечения его безопасности.
С увеличением скорости встречно движущегося объекта значение tв может быть уменьшено.
Предлагаемое устройство можно использовать в малогабаритных подвижных и неподвижных объектах, в том числе и переносных условиях, при условии применения маломощного локатора поиска. В зависимости от характера использования антенна локатора может быть неподвижной или вращающейся. В последнем варианте ширина диаграммы направленности должна быть такова, чтобы общее время облучения встречного объекта tо было больше (tо > tв) для обеспечения его обнаружения за время tо. Так, например, если принять tв = 50 мс, то при скорости кругового обзора 60 об/мин ширина диаграммы направленности антенны не должна быть менее 15o. Упрощение аппаратуры достигается тем, что для обработки используются интегральные схемы и не требуется большое количество допплеровских каналов и использование системы СДУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2334248C1 |
| ТЕЛЕВИЗИОННЫЙ ДАЛЬНОМЕР | 1995 |
|
RU2096809C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2004 |
|
RU2253879C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| УСТРОЙСТВО ПОИСКА ОБЪЕКТОВ | 1992 |
|
RU2048687C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1996 |
|
RU2096798C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2247408C1 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1991 |
|
RU2013025C1 |
Изобретение относится к области радиолокации и может быть использовано в системах предупреждения столкновений. Достигаемый технический результат - выделение встречно движущегося объекта без использования сложных узлов и увеличения времени обработки. Сущность изобретения заключается в том, что в устройстве обработки локационных сигналов преобразователь дальности выполнен в виде устройства дискретного измерения времени в параллельном коде и связан с последовательно включенными блоком параллельных линий задержек, вычитателем дальностей, вторым блоком параллельных линий задержек, вычитателем разности дальностей и дешифратором встречного курса, а также с групповым входом вычитателя дальностей, выход которого связан с групповым входом вычитателя разности дальностей. 1 ил.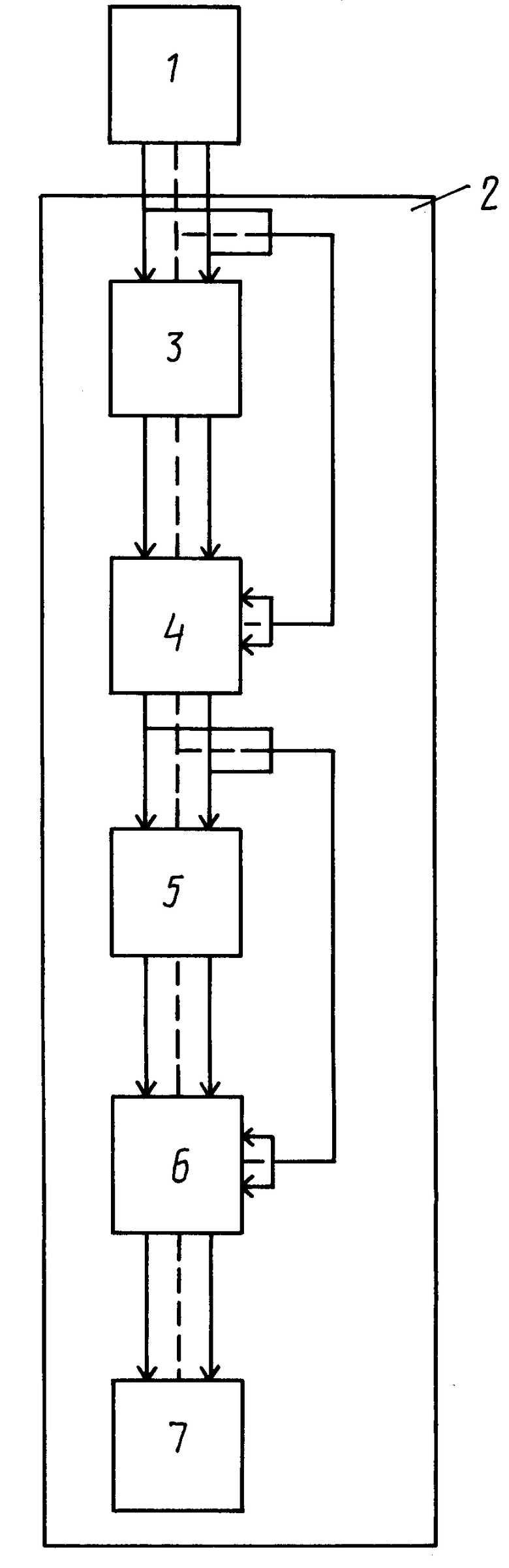
Устройство обработки локационных сигналов, состоящее из преобразователя дальности и блока обработки, отличающееся тем, что преобразователь дальности выполнен в виде устройства дискретного измерения времени в параллельном коде, несущем информацию о текущей дальности до объекта, а также тем, что в блок обработки введены два блока параллельных линий задержек, вычитатель дальностей, вычитатель разности дальностей и дешифратор встречного курса, при этом групповой выход преобразователя дальности через групповой вход блока обработки соединен с первым групповым входом вычитателя дальностей и соединен через первый блок параллельных линий задержек с вторым групповым входом вычитателя дальностей, групповой выход которого соединен с первым групповым входом вычитателя разности дальностей и соединен через второй блок параллельных линий задержек с вторым групповым входом вычитателя разности дальностей, групповой выход которого соединен с групповым входом дешифратора встречного курса.
| Гришин Ю.П | |||
| и др | |||
| Радиотехнические системы/ Под ред | |||
| Ю.М.Казаринова | |||
| - М.: Высшая школа, 1990, с.194-197 | |||
| УСТРОЙСТВО ДИСКРЕТНОГО ИЗМЕРЕНИЯ ВРЕМЕННОГО ИНТЕРВАЛА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2007742C1 |
