Изобретение относится к области сельского хозяйства, а именно, к устройствам и способам управления агрегатами при выполнении энергоемких процессов обработки почвы.
Известен способ управления агрегатом, включающий прямо пропорциональное регулирование давления на движители в зависимости от силы сопротивления на рабочем органе.
Известно устройство управления агрегатом, имеющим трактор, содержащее гидросистему, соединенную с приводом для перемещения рабочего органа в горизонтальном и вертикальном направлениях.
Недостатком данного способа и данного устройства является перегрузка движителей, уплотнение почвы, потеря энергии, увеличение массы и стоимости, что ограничивает эффективность и производительность применения известного способа и устройства, а также повышает экологическую опасность и снижает плодородие почвы.
Цель изобретения расширение диапазона изменения тяговой силы, снижение нагрузки движителей и потерь энергии и увеличение ресурса и плодородия почвы.
Поставленная цель в части способа достигается тем, что для управления используют давление в напорной линии гидравлического насоса одного из звеньев планетарного механизма привода агрегата.
Поставленная цель в части устройства достигается тем, что оно имеет планетарную передачу, одно звено которой через гидронасос и гидрораспределитель связано с приводом перемещения рабочего органа для силового регулирования.
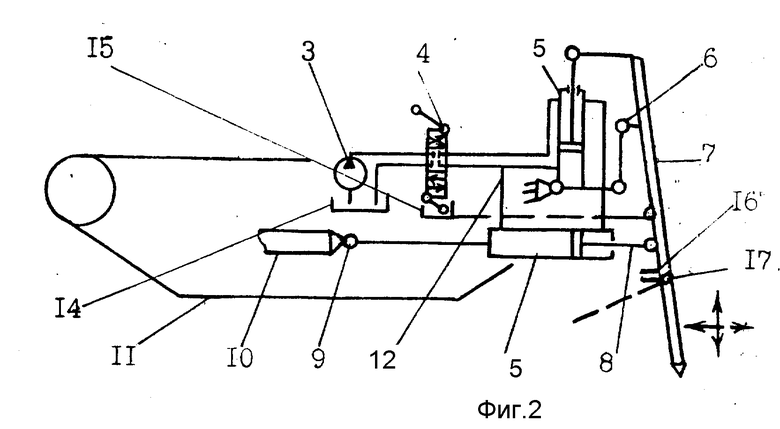
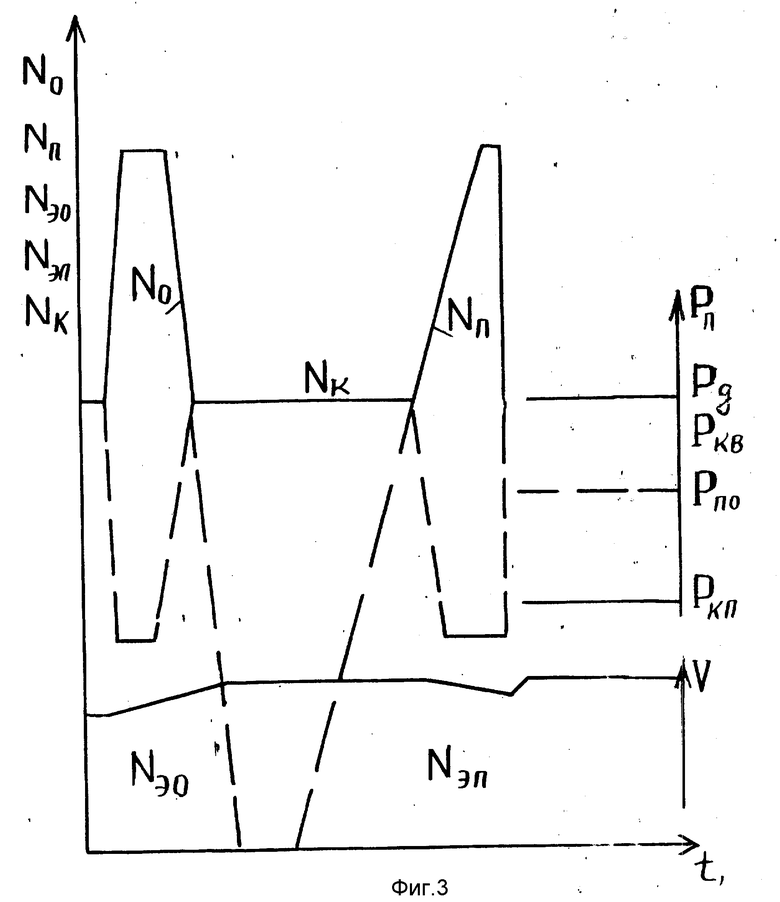
На фиг. 1 изображено устройство, вид сбоку; на фиг. 2 то же, по второму варианту; на фиг. 3 дана графическая интерпретация взаимосвяей и взаимодействий параметров, мощностей опускания Nо, подъема Nп, экономии при опускании Nэо, экономии при подъеме Nэп и привода движителей Nд, давлений подъема Pп, привода движителей Pд, корректировки вертикальной силы Pкв, поворота Pпо, замыкания муфт в коробке передач Pкп и скорости V в зависимости от времени t.
Устройство для реализации способа управления агрегатом включает трансмиссию 1 трактора с планетарной передачей 2, одно звено которого заторможено гидронасосом 3 корректором нагрузки, гидрораспределитель 4 управления приводом 5, выполненным в виде гидроцилиндра, фиксатор-ограничитель 6 положения рабочего органа 7, выполненного в виде лопаты бульдозера, ножа рыхлителя, толкающая рама 8 с шарниром 9 связи с рамой 10 движителей 11 трактора. Устройство также имеет гидросистему 12.
В другом варианте исполнения насос 3 посредством гидрораспределителя 4 связан с приводом 5, независимым от трансмиссии привода с фиксатором - ограничителем 6 хода рабочего органа 7, толкающая рама 8 содержит гидроцилиндры привода 5 продольного и вертикального перемещения рабочего органа, гидросистему 12 связи и привода, гидробак, тягу 15 для конечного переключения продольного перемещения рабочего органа 7, ограничитель 16 поворота, которого может блокировать шарнир 17 при настройке рабочего органа 7 на рабочее и холостое перемещение по направлению движения агрегата.
Планетарная передача 2 с насосом 3, приводимым от одного звена планетарной передачи 2 сцепления, может работать в качестве тормоза-регулятора нагрузки, корректора силы тяги, тяжести, сопротивления так, что сопротивление может поднять рабочий орган 7 в одном из заданных настройкой режимов. Фиксатор-ограничитель 6, фиксируя положение орудия 7 на заданной высоте, может обеспечить независимость от нагрузки. Толкающую силу и колебания приводу 5 (по второму варианту) можно сообщить тягой 15 переключения распределителя 4. Продольное движение рабочего органа 7 можно согласовать с фиксатором-ограничителем 6, фиксировать рабочий орган 7 в заданном положении, если необходимости в таком согласовании нет. Привод 5 может сообщать рабочему органу 7 продольное и вертикальное движение, как это показано стрелками, а ограничитель 16 (по второму варианту) блокировки шарнира 17 может обеспечить холостое движение вперед, как показано пунктиром.
Устройство для реализации способа управления работает следующим образом.
В процессе движения вперед и обработки почвы, уборки камней рабочий орган 7 заглубляется, толкающая сила сопротивления создает давление жидкости в полости подъема гидроцилиндра или гидроцилиндров (по второму варианту) привода 5 возникает подъемная сила догрузки движителей 11. Перегрузка силой тяги (сопротивления) и увеличение силы тяжести в контакте движителя 11 с почвой снижает буксование, и нет необходимости в установке балласта, увеличении массы, без разгрузки движителей 11 преодолевает перегрузку и повышенное сопротивление.
Способ управления реализуют тем, что сопротивление рабочего органа 7 и давление жидкости в напорной линии насоса 3 одного звена планетарного механизма 2 сцепления используют для получения подъемной силы, в первую очередь, и высотного регулирования рабочего органа 7 и сопротивления, во вторую очередь, согласовывают в процессе работы силы тяги и тяжести и поддерживают минимальное буксование движителей 11. При повышении сопротивления до предела, при котором давление создает силу, превышающую силу тяжести и реакции почвы в вертикальной плоскости, рабочий орган 7 поднимают и предохраняют от поломки, и поддерживают силовое регулирование. Опорные реакции движителей 11 увеличиваются пропорционально силе сопротивления бульдозера, за пределами такого регулирования силу тяги и высоту рабочего органа 7 согласовывают с давлением жидкости в приводе движителей 11. Для принудительного подъема давление повышают, замедляя движение, например, торможением движителя 11 или его механического привода. За пределами регулирования скорости и силы сопротивления обеспечивают защиту от перегрузки. Силы тяги и тяжести корректируют нагрузку. Давление от сил тяги и давление жидкости от сил тяжести уравновешивают при определенном положении рабочего органа 7. Подъемную силу и силу тяги уравновешивают приводом 5. При низком давлении и силе тяги силу тяжести на движители 11 снижают, а при высоком давлении повышают, в каждом случае снижение сил тяги и тяжести и корректирование вертикальных нагрузок без подъема рабочего органа 7 без дросселирования жидкости обеспечивает согласование процессов и энергопотоков, подъем рабочего орудия мощностью Nпс с возвратом ее части Nо при опускании с экономией на подъеме Nэп и возвратом Nэо при опускании от исходного энергетического уровня Nк и давления Pд без слива и дросселирования, а также снижения до нуля, это границы изменения энергопотоков и давлений во время t работы влияют на частичное изменение скорости V движения без постоянного отбора мощности для управления.
Возвратно-поступательное движение рабочего органа 7 в виде ножа, лопаты и т.д. в продольной плоскости, как это показано на фиг. 2 стрелками, обеспечивает согласование сил тяги и тяжести, а также движений. При движении рабочего органа 7 вперед сопротивление и подъемная сила согласованы, при опускании и тяге назад разгружают движители 11 от силы тяжести пропорционально силе тяги. Снижение сил тяжести и тяги в контакте движителей 11 с почвой в период движения рабочего органа 7 назад и получения движущей силы при выполнении работ снижает необходимость в большой массе трактора и балласте до нуля. Гидролинию коррекции сил и реакций переводят в режим запирания потоков энергии и исключения отбора энергии от движителей 11. В этом случае упруго-эластичное свойство привода движителей 11 теряется. В рабочем режиме взаимосвязь сил тяги и тяжести обеспечивает высокую эластичность привода.
Использование: изобретение относится к области сельского хозяйства, а именно, к устройствам и способам управления агрегатами при выполнении энергоемких процессов обработки почвы. Сущность изобретения: способ управления агрегатом, включающий прямо пропорциональное регулирование давления на движители в зависимости от силы сопротивления на рабочем органе. Для управления используют давление в напорной линии гидравлического насоса 4 одного из звеньев планетарного механизма 2 привода 5. Устройство управления агрегатом, имеющим трактор, содержит гидросистему 12, соединенную с приводом 5 для перемещения рабочего органа 7 в горизонтальном и вертикальном направлениях. Устройство также имеет планетарную передачу 2, одно звено которой через гидронасос 3 и гидрораспределитель 4 связано с приводом 5 перемещения рабочего органа 7 для силового регулирования. 2 с.п. ф-лы, 3 ил.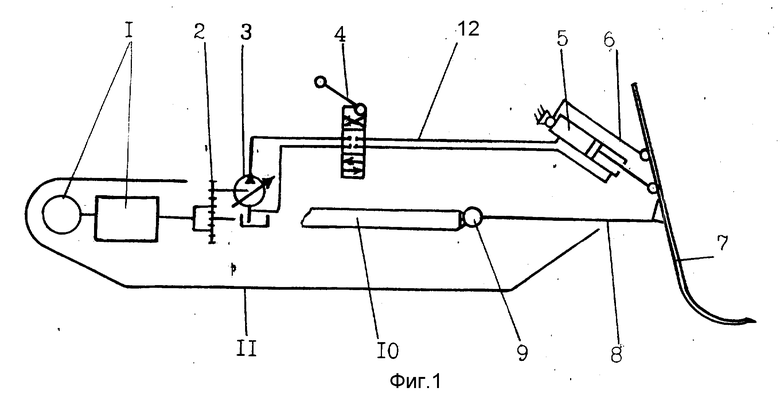
| Сельскохозяйственный агрегат | 1983 |
|
SU1079193A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
