Изобретение относится к измерительной технике и может использоваться в системах управления ракет и других летательных аппаратов (ЛА) для эффективного контроля его траекторного движения и режима нагружения конструкции.
Одной из задач, решаемых системой определения кинематических параметров движения, является получение ускорений в проекции на связанные оси, которые используются в системе управления современных ракет для ограничения аэродинамических нагрузок qα,qβ и продольных перегрузок. В настоящее время для измерения вектора ускорения в заданной системе отсчета используются акселерометры [1] . Для этого достаточно трех акселерометров, оси чувствительности которых некомпланарны. Второй не менее важной задачей является определение скорости движения контролируемого ЛА. Для этой цели могут использоваться гироинтеграторы, оси чувствительности которых параллельны осям базовой системы отсчета [2, 3].
Известная система определения кинематических параметров движения состоит из блока акселерометров и блока гироинтеграторов, каждый из которых производит непосредственные определения трех составляющих вектора линейного ускорения  и трех составляющих вектора линейной скорости
и трех составляющих вектора линейной скорости  . При всей простоте системы-аналога (в нее входят только измерительные приборы) она имеет ряд существенных недостатков:
. При всей простоте системы-аналога (в нее входят только измерительные приборы) она имеет ряд существенных недостатков:
1) Кинематические параметры движения (вектор ускорения  и вектор скорости
и вектор скорости  ) определяются в фиксированных точках.
) определяются в фиксированных точках.
2) Полученные такой системой скорость  и ускорение
и ускорение  будут соответствовать различным точкам ЛА, т.к. блок акселерометров и блок гироинтеграторов конструктивно не могут быть закреплены в одной и той же точке. Акселерометры крепятся к корпусу ЛА, а гироинтеграторы устанавливаются на гиростабилизированной платформе (ГСП). Очевидно, что для произвольной точки ЛА определить требуемые кинематические параметры движения
будут соответствовать различным точкам ЛА, т.к. блок акселерометров и блок гироинтеграторов конструктивно не могут быть закреплены в одной и той же точке. Акселерометры крепятся к корпусу ЛА, а гироинтеграторы устанавливаются на гиростабилизированной платформе (ГСП). Очевидно, что для произвольной точки ЛА определить требуемые кинематические параметры движения  такой системой невозможно.
такой системой невозможно.
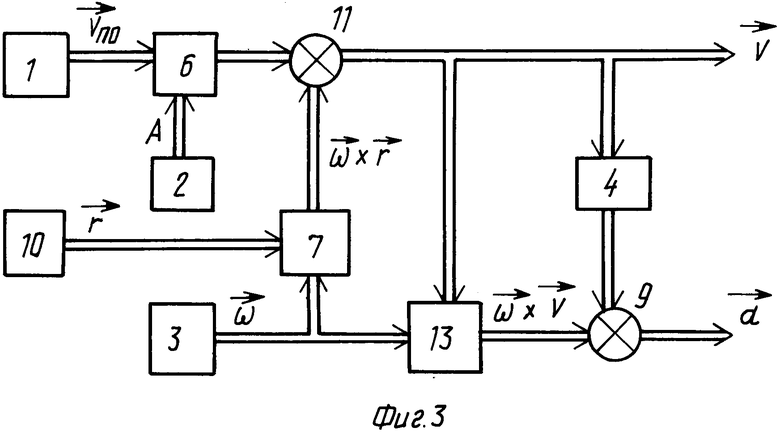
Известная также система [4], функциональная схема которой приведена на фиг. 1, где обозначено 1 - блок гироинтеграторов (БГИ). 2 - устройство определения ориентации (УОО), 3 - измеритель вектора угловой скорости (ИВУС), 4 - блок обработки линейных скоростей (БОЛС), 5 - блок обработки угловых скоростей (БОУС), 6 - устройство пересчета проекций вектора из инерциальной системы координат в проекции на связанные оси (УПВ), 7 - блок векторного умножения (БВУ), 8 - блок двойного векторного умножения (БДВУ), 9 - блок определения вектора ускорения (БОВУ) и 10 - задатчик координат точки измерения.
В основу построения системы-прототипа положено известное соотношение между ускорением в произвольной точке твердого тела  и ускорением в наперед заданной точке (полюсе)
и ускорением в наперед заданной точке (полюсе)  :
: ,
,
где - вектор угловой скорости ЛА;
- вектор угловой скорости ЛА; - угловое ускорение ЛА (первая производная по времени вектора угловой скорости
- угловое ускорение ЛА (первая производная по времени вектора угловой скорости  );
); - радиус-вектор точки измерения относительно полюса.
- радиус-вектор точки измерения относительно полюса.
Символ "X" обозначает операцию векторного умножения векторов.
Координаты точки измерения вектора ускорения  = {rx, ry, rz} для каждого сеанса измерения постоянны и их определяет задатчик.
= {rx, ry, rz} для каждого сеанса измерения постоянны и их определяет задатчик.
Ускорение в полюсе в проекциях на связанные оси  связано с ускорением полюса в инерциальных осях
связано с ускорением полюса в инерциальных осях  соотношением:
соотношением: ,
,
где
axou=dVxo/dt, ayou=dVyo/dt, azou=dVzo/dt;
Vxo, Vyo, Vzo - показания блока гироинтеграторов;
A - матрица направляющих косинусов, вычисляемая устройством определения ориентации.
Угловое положение связанной системы координат (ССК) OXYZ относительно инерциальной системы координат (ИСК) OXиYиZи может, например, определяться тремя "баллистическими" углами тангажа ϑ , рыскания ψ и вращения ϕ . Матрица перехода от системы координат OXиYиZи к системе OXYZ, необходимая для пересчета ускорений из инерциальных в связанные оси, есть матрица направляющих косинусов A и имеет вид:
На практике в качестве устройства определения ориентации обычно применяют гиростабилизированную платформу (ГСП), измеряющую углы тангажа ϑ , рыскания ψ и вращения ϕ . Тогда гироинтеграторы устанавливают на платформе, а элементы матрицы A формируются спецвычислителем, входящим в состав УОО-2. За полюс принимается место установки ГСП. Дифференцирование по времени скорости, измеренной БГИ-1, производится БОЛС-4, а пересчет полученного результата из ИСК в ССК производится УПВ-6 по информации об угловом положении ЛА, поступающей с выхода УОО-2. Измерение вектора угловой скорости изделия в ССК производится датчиками угловых скоростей (ДУСами), объединенными в соответствующий блок (ИВУС-3). Составляющие углового ускорения  непосредственно не измеряются. Для их получения необходимо производить дифференцирование угловых скоростей ωx,ωy,ωz (возможно с предварительной фильтрацией).
непосредственно не измеряются. Для их получения необходимо производить дифференцирование угловых скоростей ωx,ωy,ωz (возможно с предварительной фильтрацией).
 .
.
Текущее значение вектора углового ускорения  в проекции на оси ССК определяется БОУС-5.
в проекции на оси ССК определяется БОУС-5.
В процессе полета ЛА чувствительные элементы - гироинтеграторы, установленные на ГСП, производят измерение трех компонент вектора скорости в точке их установки, которые затем дифференцируются по времени БОЛС-4 и пересчитываются в проекции на связанные оси в УПВ-6, на выходе которого устанавливается значение вектора ускорения в полюсе ЛА -  . Ускорение, вызванное угловым движением ЛА, формируется БДВУ-8 по сигналам ИВУС-3. Учет влияния углового ускорения ЛА
. Ускорение, вызванное угловым движением ЛА, формируется БДВУ-8 по сигналам ИВУС-3. Учет влияния углового ускорения ЛА  на результат измерения производится путем дифференцирования БОУС-5 показаний ИВУС-3 с последующим его пересчетом в БВУ-7. Суммируя значения, поступающие на входы БОВУ-9, на его выходе получаем требуемое значение вектора ускорения
на результат измерения производится путем дифференцирования БОУС-5 показаний ИВУС-3 с последующим его пересчетом в БВУ-7. Суммируя значения, поступающие на входы БОВУ-9, на его выходе получаем требуемое значение вектора ускорения  в интересующей нас точке ЛА, координаты которой
в интересующей нас точке ЛА, координаты которой  установлены в задатчике координат точки измерения.
установлены в задатчике координат точки измерения.
Рассмотренная система [4] измеряет лишь часть требуемых параметров движения ЛА, а именно только вектор ускорения.
Недостатком системы-прототипа является невозможность определения вектора скорости в произвольной точке летательного аппарата. Более того, система-прототип в принципе не может обеспечить определение вектора скорости в точке, координаты которой относительно корпуса ЛА изменяются с течением времени полета (например, скорости центра масс ракеты, так как сам центр масс перемещается относительно корпуса ракеты и не совпадает с точкой установки измерителей скорости).
Техническим результатом данного изобретения является практическая возможность определения полного набора кинематических параметров движения (как вектора ускорения  , так и вектора скорости
, так и вектора скорости  ) произвольной точки летательного аппарата.
) произвольной точки летательного аппарата.
Указанный технический результат достигается тем, что в предлагаемой системе определения кинематических параметров движения, включающей блок гироинтеграторов, устройство определения ориентации, измеритель вектора угловой скорости, блок обработки линейных скоростей, устройство пересчета проекций вектора из инерциальной системы координат в проекции на связанные оси, блок векторного умножения и задатчик координат точки измерения, при этом выход устройства определения ориентации связан с входом задания углового положения связанных осей относительно инерциальной системы координат устройства пересчета проекций вектора из инерциальной системы координат в проекции на связанные оси, выход блока обработки линейных скоростей связан с векторным входом устройства пересчета проекций вектора из инерциальной системы координат в проекции на связанные оси, задатчик координат точки измерения связан с параметрическим входом блока векторного умножения, в отличии от прототипа введены блок определения вектора скорости и блок перевода вектора из проекций на связанные оси в проекции на оси инерциальной системы координат, при этом выход блока гироинтеграторов связан с первым входом блока определения вектора скорости, выход устройства определения ориентации связан с входом задания углового положения связанных осей относительно инерциальной системы координат блока перевода вектора из проекций на связанные оси в проекции на оси инерциальной системы координат, выход измерителя вектора угловой скорости связан с информационным входом блока векторного умножения, выход которого связан с векторным входом блока перевода вектора из проекций на связанные оси в проекции на оси инерциальной системы координат, выход которого связан с вторым входом блока определения вектора скорости, выход устройства пересчета проекций вектора из интерциальной системы координат в проекции на связанные оси связан с группой выходов компонент вектора ускорения, выход блока определения вектора скорости связан с группой выходов компонент вектора скорости, а также с входом блока обработки линейных скоростей.
Указанный технический результат достигается тем, что в предлагаемой системе определения кинематических параметров движения, включающей блок гироинтеграторов, устройство определения ориентации, измеритель вектора угловой скорости, блок обработки линейных скоростей, устройство пересчета проекций вектора из инерциальной системы координат в проекции на связанные оси, блок векторного умножения, блок определения вектора ускорения и задатчик координат точки измерения, при этом выход устройства определения ориентации связан с входом задания углового положения связанных осей относительно инерциальной системы координат устройства пересчета проекций вектора из инерциальной системы координат в проекции на связанные оси, выход блока определения вектора ускорения связан с первой группой информационных выходов системы, задатчик координат точки измерения связан с параметрическим входом блока векторного умножения, в отличии от прототипа введены блок определения вектора скорости и блок векторного умножения скоростей, при этом выход блок гироинтеграторов связан с векторным входом устройства пересчета проекций вектора из инерциальной системы координат в проекции на связанные оси, выход которого связан с первым входом блока определения вектора скорости, выход измерителя вектора угловой скорости связан с информационными входами блока векторного умножения и блока векторного умножения скоростей, выход которого связан с первым входом блока определения вектора ускорения, выход блока обработки линейных скоростей связан с вторым входом блока определения вектора ускорения, выход блока векторного умножения связан с вторым входом блока определения вектора скорости, выход которого связан с второй группой информационных выходов системы, а также с входом блока обработки линейных скоростей и параметрическим входом блока векторного умножения скоростей.
Суть первого варианта предлагаемой системы заключается в определении вектора скорости  в заданной точке и последующего дифференцирования его с целью нахождения вектора ускорения
в заданной точке и последующего дифференцирования его с целью нахождения вектора ускорения  той же точки:
той же точки: .
.
Если оба вектора  определены в ИСК, то операция дифференцирования вектора сводится к простому дифференцированию составляющих этого вектора, т. е. для
определены в ИСК, то операция дифференцирования вектора сводится к простому дифференцированию составляющих этого вектора, т. е. для  справедливо
справедливо  , где индекс "и" указывает на представление векторов в ИСК, а точка сверху - на дифференцирование скалярной величины по времени; i может принимать значения x, y или z. Скорость произвольной точки ЛА
, где индекс "и" указывает на представление векторов в ИСК, а точка сверху - на дифференцирование скалярной величины по времени; i может принимать значения x, y или z. Скорость произвольной точки ЛА  может быть определена через скорость в полюсе
может быть определена через скорость в полюсе  и угловую скорость ЛА
и угловую скорость ЛА  . Однако, вектора
. Однако, вектора  представляются в ССК, а вектор скорости полюса
представляются в ССК, а вектор скорости полюса  измеряется гироинтеграторами в проекциях на оси ИСК. В силу того, что результирующий вектор скорости точки измерения
измеряется гироинтеграторами в проекциях на оси ИСК. В силу того, что результирующий вектор скорости точки измерения  должен быть представлен в ИСК (для возможности компонентного дифференцирования), операцию сложения векторов осуществляем в ИСК. Получаем соотношение:
должен быть представлен в ИСК (для возможности компонентного дифференцирования), операцию сложения векторов осуществляем в ИСК. Получаем соотношение: ,
,
где
AТ - матрица, транспортированная к матрице A.
Необходимые для нужд системы управления продольное, нормальное и боковое ускорения являются проекциями найденного вектора ускорения на оси ССК. Для их получения достаточно произвести пересчет вектора ускорения из одной (ИСК) в другую (ССК) систему координат  . Операции покомпонентного дифференцирования вектора и перевода полученного результата из ИСК в ССК выполняются последовательно, как и в системе-прототипе.
. Операции покомпонентного дифференцирования вектора и перевода полученного результата из ИСК в ССК выполняются последовательно, как и в системе-прототипе.
Предлагаемая система определяет вектор ускорения заданной точки ЛА путем дифференцирования вектора скорости той же точки ЛА. Во втором варианте системы оба вектора  определяются в ССК. Поэтому во втором варианте системы реализовано следующее правило дифференцирования векторов:
определяются в ССК. Поэтому во втором варианте системы реализовано следующее правило дифференцирования векторов: ,
,
где
под "F" понимается операнд локальной производной вектора,
(считая  , получим Wi = dVi/dt).
, получим Wi = dVi/dt).
Значение вектора скорости в интересующей точке ЛА находится по соотношению: ,
,
где - вектор скорости в точке измерения;
- вектор скорости в точке измерения; - вектор скорости в полюсе;
- вектор скорости в полюсе; - вектор угловой скорости изделия;
- вектор угловой скорости изделия; - радиус-вектор точки измерения относительно полюса.
- радиус-вектор точки измерения относительно полюса.
Но если вектора  представляются в ССК, то вектор скорости полюса
представляются в ССК, то вектор скорости полюса  измеряется гироинтеграторами в проекциях на оси ИСК. Поэтому его предварительно (перед операцией сложения скоростей) необходимо перевести из ИСК в ССК.
измеряется гироинтеграторами в проекциях на оси ИСК. Поэтому его предварительно (перед операцией сложения скоростей) необходимо перевести из ИСК в ССК.
 ,
,
где индекс "и" подчеркивает, что данный вектор представлен в проекциях на оси ИСК. Таким образом, алгоритм определения кинематических параметров движения (  ) включает операции:
) включает операции:
1) определение вектора скорости в полюсе ;
;
2) определение вектора скорости в заданной точке ЛА
3) определение вектора ускорения в заданной точке ЛА
Отличительной особенностью предложенных технических решений является то, что предлагаемая система (в обоих вариантах) позволяет определять полный набор кинематических параметров движения (не только вектор ускорения, но и вектор скорости) для разных точек ЛА с помощью одного комплекта датчиков первичной информации. Она дает принципиальную возможность определения составляющих вектора ускорения и вектора скорости в произвольной (но одной и той же для обеих векторов) точке ЛА, в том числе и в точке С переменными по времени координатами относительно выбранного полюса.
Первый вариант системы предполагает определение проекций вектора скорости  на оси ИСК в интересующей точке ЛА и реализует выражение:
на оси ИСК в интересующей точке ЛА и реализует выражение: ,
,
где под "F" понимается операнд локальной производной вектора.
Использование вектора скорости в ИСК  , измеренного автономными средствами непосредственно на борту ЛА, открывает широкие возможности прежде всего для послеполетного анализа результатов полета ЛА. Исходя из этой информации, можно восстановить траекторию движения интересующей части конструкции ЛА относительно Земли. Особенно важна такая информация на начальном участке полета ракет-носителей при их старте. В перспективе возможно привлечение вектора скорости
, измеренного автономными средствами непосредственно на борту ЛА, открывает широкие возможности прежде всего для послеполетного анализа результатов полета ЛА. Исходя из этой информации, можно восстановить траекторию движения интересующей части конструкции ЛА относительно Земли. Особенно важна такая информация на начальном участке полета ракет-носителей при их старте. В перспективе возможно привлечение вектора скорости  в системе управления движением для гарантированного исключения недопустимых с точки зрения безопасности полета маневров ЛА.
в системе управления движением для гарантированного исключения недопустимых с точки зрения безопасности полета маневров ЛА.
Второй вариант системы предполагает определение проекций вектора скорости  на связанные оси в интересующей точке ЛА и реализует выражение:
на связанные оси в интересующей точке ЛА и реализует выражение:
Очень важно, что все кинематические параметры движения (как вектор ускорения, так и вектор скорости) приводятся в одной системе отсчета, что предпочтительно для нужд бортовой системы управления. Так, если координаты точки измерения  соответствуют положению центра масс ракеты, то измеренный системой вектор скорости
соответствуют положению центра масс ракеты, то измеренный системой вектор скорости  содержит проекции скорости движения центра масс на связанные оси ракеты, а значит будут известны и направляющие косинусы углов, образованных вектором скорости
содержит проекции скорости движения центра масс на связанные оси ракеты, а значит будут известны и направляющие косинусы углов, образованных вектором скорости  и осями ЛА. Исходя из этой информации, могут быть легко определены фактические углы атаки α и скольжения β . Использование вектора скорости в ССК
и осями ЛА. Исходя из этой информации, могут быть легко определены фактические углы атаки α и скольжения β . Использование вектора скорости в ССК  , измеренного автономными средствами непосредственно на борту ЛА, открывает широкие возможности и для послеполетного анализа результатов пуска ЛА.
, измеренного автономными средствами непосредственно на борту ЛА, открывает широкие возможности и для послеполетного анализа результатов пуска ЛА.
Сущность изобретения поясняется чертежами, где
на фиг. 2 представлена функциональная схема первого варианта системы;
на фиг. 3 - функциональная схема второго варианта системы;
на фиг. 4 - схема реализации БОЛС-4;
на фиг. 5 - схема реализации УПВ-6;
на фиг. 6 - схема реализации БПВ-12;
на фиг. 7 - схема реализации БВУС-13.
Пример реализации первого варианта предложенной системы представлен на фиг. 2, где 1 - блок гироинтеграторов (БГИ), 2 - устройство определения ориентации (УОО), 3 - измеритель вектора угловой скорости (ИВУС), 4 - блок обработки линейных скоростей (БОЛС), 6 - устройство пересчета проекций вектора из ИСК в ССК (УПВ), 7 - блок векторного умножения (БВУ), 10 - задатчик координат точки измерения, 11 - блок определения вектора скорости (БОВС), 12 - блок перевода вектора из ССК в ИСК (БПВ), при этом выход БГИ-1 связан с первым входом БОВС-11, выход УОО-2 связан с входами задания углового положения связанных осей относительно инерциальной системы координат УПВ-6 и БПВ-12, выход ИВУС-3 связан с информационным входом БВУ-7, выход которого связан с векторным входом БПВ-12, выход которого связан с вторым входом БОВС-11, выход УПВ-6 связан с группой выходов компонент вектора ускорения, выход БОВС-11 связан с группой выходов компонент вектора скорости, а также с входом БОЛС-4, задатчик координат точки измерения связан с параметрическим входом БВУ-7.
Пример реализации второго варианта предложенной системы представлен на фиг.3, где 1 - блок гироинтеграторов (БГИ), 2 - устройство определения ориентации (УОО), 3 - измеритель вектора угловой скорости (ИВУС), 4 - блок обработки линейных скоростей (БОЛС), 6 - устройство пересчета проекций вектора из ИСК в ССК (УПВ), 7 - блок векторного умножения (БВУ), 9 - блок определения вектора ускорения (БОВУ), 10 - задатчик координат точки измерения, 11 - блок определения вектора скорости (БОВС), 13 - блок векторного умножения скоростей (БВУС), при этом выход БГИ-1 связан с векторным входом УПВ-6, выход УОО-2 связан с входом задания углового положения связанных осей относительно инерциальной системы координат УПВ-6, выход которого связан с первым входом БОВС-11, выход ИВУС-3 связан с информационными входами БВУ-7 и БВУС-13, выход которого связан с первым входом БОВУ-9, выход БОЛС-4 связан с вторым входом БОВУ-9, выход которого связан с первой группой информационных выходов системы, выход БВУ-7 связан с вторым входом БОВС-11, выход которого связан с второй группой информационных выходов системы, а также в входом БОЛС-4 и параметрическим входом БВУС-13, задатчик координат точки измерения связан с параметрическим входом БВУ-7.
Реализация электронных блоков и элементов предлагаемой системы выполнена на интегральных схемах и стандартных аналоговых модулях и представлена фиг. 4 - 7.
БГИ (1) установлен на ГСП и выдает три составляющие вектора кажущейся скорости в ИСК, являющиеся главным источником информации для определения вектора скорости и вектора ускорения в заданной точке ЛА. В простейшем случае он состоит из трех гироинтеграторов, оси чувствительности которых параллельны трем различным осям ИСК.
УОО (2) состоит из ГСП, моделирующей на борту ИСК и определяющей взаимное расположение осей ССК и ИСК, и блока электроники, вычисляющего элементы матрицы A по углам отклонения рамок ГСП, соответствующих углам тангажа ϑ , рыскания ψ и вращения ϕ .
ИВУС (3) включает три ДУСа, жестко закрепленных на корпусе ЛА так, чтобы их оси чувствительности были параллельны трем соответствующим осям ССК.
БОЛС (4) состоит из трех идентичных блоков, каждый из которых производит фильтрацию исходного сигнала от помех и высокочастотных наводок с последующим его дифференцированием (см. фиг.4). Частотные характеристики каждого из блоков формируются таким образом, чтобы в диапазоне рабочих частот (который соответствует движению ЛА как твердого тела) они были максимально приближены к характеристикам дифференцирующего звена 1-го порядка (амплитудная характеристика имела наклон +20 дБ/дек, а сдвиг по фазе был практически постоянен и равен + 90 град.), а на больших частотах обеспечивали существенное подавление сигнала (амплитудно-частотная характеристика должна иметь крутой спад). Блок выполнен на однотипных операционных усилителях, входная цепь которых имеет ограничительный резистор (он и играет роль простейшего фильтра высоких частот). Для игнорирования системой сигналов, вызванных упругими колебаниями корпуса ЛА, в цепь обратной связи операционных усилителей параллельно резисторам включены шунтирующие конденсаторы Cос; их номинал выбирается из требования достаточного ослабления вибрационных составляющих входного сигнала (RCос≈ 1/fупр, где fупр - верхняя циклическая частота спектра движения Ла как твердого тела, и она меньше, чем частота первого тона упругих колебаний). Номиналы резисторов и конденсаторов выбираются из условия практически чистого дифференцирования входного сигнала в рабочей области частот (постоянная времени T = RC ≈ 1) и значительного его подавления в высокочастотной области спектра ( τ = RогрC ≈ 1/fраб, где fраб - циклическая частота, ограничивающая рабочую область частот справа).
УПВ (6) производит пересчет одного и того же вектора из ИСК в ССК и представляет собой схему умножения матрицы на вектор, реализующую выражения:
Uвых1 = a11Uвх1 + a12Uвх2 + a13Uвх3,
Uвых2 = a21Uвх1 + a22Uвх2 + a23Uвх3,
Uвых3 = a31Uвх1 + a32Uвх2 + a33Uвх3,
где
ajk - элементы матрицы направляющих косинусов A. БВУ (7) осуществляет векторное умножение двух векторов;
согласно выражениям:
Где - информационный вход блока,
- информационный вход блока, - параметрический вход блока.
- параметрический вход блока.
БОВУ (9) выполняет покомпонентное сложение векторов, поступающих на его входы.
БОВС (11) выполняет сложение двух векторов, которое производится покомпонентно с помощью элементарных одноканальных сумматоров (выполненных, например, на операционных усилителях).
БПВ (12) производит пересчет одного и того же вектора из ССК в ИСК и представляет собой схему умножения матрицы на вектор, реализующую выражения:
Uвых1 = a11Uвх1 + a21Uвх2 + a31Uвх3,
Uвых2 = a12Uвых1 + a22Uвх2 + a32Uвх3,
Uвых3 = a13Uвх1 + a23Uвх2 + a33Uвх3;
БВУ (13) осуществляет векторное умножение двух векторов:
согласно выражениям:
где информационный вход блока,
информационный вход блока, - параметрический вход блока.
- параметрический вход блока.
Структура БВУС-13 полностью идентична структуре БВУ-7.
Задатчик (10) определяет координаты точки измерения вектора ускорения  относительно выбранного полюса и служит для запитки параметрического входа БВУ-7.
относительно выбранного полюса и служит для запитки параметрического входа БВУ-7.
Преимущество предлагаемой системы состоит в том, что и ускорение  и скорость
и скорость  определяются для одной и той же произвольной (а не фиксированной точки ЛА. В силу того, что основные чувствительные элементы системы - гироинтеграторы расположены на гиростабилизированной платформе и, следовательно, находятся в более благоприятных условиях функционирования, достигаются высокие надежность системы и достоверность получаемых измерений.
определяются для одной и той же произвольной (а не фиксированной точки ЛА. В силу того, что основные чувствительные элементы системы - гироинтеграторы расположены на гиростабилизированной платформе и, следовательно, находятся в более благоприятных условиях функционирования, достигаются высокие надежность системы и достоверность получаемых измерений.
Рассмотрим работу первого варианта системы.
В процессе полета ЛА чувствительные элементы - гироинтеграторы, установленные на ГСП, производят измерение трех компонент вектора скорости в точке их установки. Параллельно в БВУ-7 по информации об угловой скорости ЛА, поступающей с ИВУС-3, определяется добавка скорости  , соответствующая точке ЛА, координаты которой задаются задатчиком координат точки измерения. Полученная на выходе БВУ-7 добавка скорости поступает на векторный вход БПВ-12, где пересчитывается из ССК в ИСК в соответствии с текущей ориентацией ЛА в пространстве, определяемой УОО-2. БОВС-11 складывает показания гироинтеграторов, формируемых на выходе БГИ-1, с установленными на выходе БПВ-12 значениями. На выходе БОВС-11 будем иметь вектор скорости интересующей точки ЛА в проекциях на оси ИСК. Его компоненты образуют группу выходов системы, соответствующих вектору скорости, а также являются исходной информацией при определении вектора ускорения той же точки ЛА. Произведя покомпонентное дифференцирование величин, поступающих на вход БОЛС-4, и осуществив в УПВ-6 пересчет результатов из ИСК в ССК, исходя из информации об угловом положении ЛА, поступающей от УОО-2, получаем требуемое значение вектора ускорения в интересующей нас точке ЛА (координаты которой
, соответствующая точке ЛА, координаты которой задаются задатчиком координат точки измерения. Полученная на выходе БВУ-7 добавка скорости поступает на векторный вход БПВ-12, где пересчитывается из ССК в ИСК в соответствии с текущей ориентацией ЛА в пространстве, определяемой УОО-2. БОВС-11 складывает показания гироинтеграторов, формируемых на выходе БГИ-1, с установленными на выходе БПВ-12 значениями. На выходе БОВС-11 будем иметь вектор скорости интересующей точки ЛА в проекциях на оси ИСК. Его компоненты образуют группу выходов системы, соответствующих вектору скорости, а также являются исходной информацией при определении вектора ускорения той же точки ЛА. Произведя покомпонентное дифференцирование величин, поступающих на вход БОЛС-4, и осуществив в УПВ-6 пересчет результатов из ИСК в ССК, исходя из информации об угловом положении ЛА, поступающей от УОО-2, получаем требуемое значение вектора ускорения в интересующей нас точке ЛА (координаты которой  установлены в задатчике координат точки измерения). На выходе УПВ-6 будем иметь вектор ускорения той же интересующей точки ЛА. Его компоненты образуют группу выходов системы, соответствующих вектору ускорения, Изменяя в процессе полета координаты
установлены в задатчике координат точки измерения). На выходе УПВ-6 будем иметь вектор ускорения той же интересующей точки ЛА. Его компоненты образуют группу выходов системы, соответствующих вектору ускорения, Изменяя в процессе полета координаты  (путем выбора из запоминающего устройства, смены варианта из конечного списка сечений подлежащих контролю, по заранее заданной программе изменения координат или путем формирования этих величин в системе управления ЛА, либо каким-то другим способом), мы имеем возможность определить значения кинематических параметров движения в той точке (в том сечении ЛА), в которой они необходимы в данный момент времени, не прибегая к дополнительным измерениям.
(путем выбора из запоминающего устройства, смены варианта из конечного списка сечений подлежащих контролю, по заранее заданной программе изменения координат или путем формирования этих величин в системе управления ЛА, либо каким-то другим способом), мы имеем возможность определить значения кинематических параметров движения в той точке (в том сечении ЛА), в которой они необходимы в данный момент времени, не прибегая к дополнительным измерениям.
Рассмотрим работу второго варианта системы.
В процессе полета ЛА чувствительные элементы - гироинтеграторы, установленные на ГСП, производят измерение трех компонент вектора скорости в точке их установки, которые затем пересчитываются УПВ-6 по информации, поступающей с УОО-2, в проекции того же вектора  на оси ССК. Параллельно в БВУ-7 по информации об угловой скорости ЛА, поступающей с ИВУС-3, определяется добавка скорости
на оси ССК. Параллельно в БВУ-7 по информации об угловой скорости ЛА, поступающей с ИВУС-3, определяется добавка скорости  , соответствующая точке ЛА, координаты которой задаются задатчиком координат точки измерения. Получения на выходе БВУ-7 добавка скорости поступает на один из входов БОВС-11, который складывает ее с установленным на выходе УПВ-6 значением
, соответствующая точке ЛА, координаты которой задаются задатчиком координат точки измерения. Получения на выходе БВУ-7 добавка скорости поступает на один из входов БОВС-11, который складывает ее с установленным на выходе УПВ-6 значением  . Произведя покомпонентное дифференцирование величин, поступающих на вход БОЛС-4, осуществив в БВУС-13 векторное произведение векторов
. Произведя покомпонентное дифференцирование величин, поступающих на вход БОЛС-4, осуществив в БВУС-13 векторное произведение векторов  , поступающих с выходов ИВУС-3 и БОВС-11 соответственно, и суммируя сигналы с выходов БОЛС-4 и БВУ-12 в БОВУ-9, на его выходе получаем требуемое значение вектора ускорения в интересующей нас точке ЛА (координаты которой
, поступающих с выходов ИВУС-3 и БОВС-11 соответственно, и суммируя сигналы с выходов БОЛС-4 и БВУ-12 в БОВУ-9, на его выходе получаем требуемое значение вектора ускорения в интересующей нас точке ЛА (координаты которой  установлены в задатчике координат точки измерения). На выходе БОВС-11 будем иметь вектор скорости интересующей точки ЛА в проекциях на связанные оси. Его компоненты образуют вторую группу выходов системы, а также являются исходной информацией при определении вектора ускорения той же точки ЛА. Изменяя в процессе полета координаты
установлены в задатчике координат точки измерения). На выходе БОВС-11 будем иметь вектор скорости интересующей точки ЛА в проекциях на связанные оси. Его компоненты образуют вторую группу выходов системы, а также являются исходной информацией при определении вектора ускорения той же точки ЛА. Изменяя в процессе полета координаты  (путем выбора из запоминающего устройства, смены варианта из списка сечений, подлежащих контролю, по заранее заданной программе изменения координат или путем формирования этих величин в системе управления ЛА, либо каким-то другим способом), мы имеем возможность определить значения кинематических параметров движения в той точке (в том сечении ЛА), в которой они необходимы в данный момент времени, не прибегая к дополнительным измерениям. К тому же все параметры движения представляются в одной системе координат, что очень важно при анализе результатов полета ЛА.
(путем выбора из запоминающего устройства, смены варианта из списка сечений, подлежащих контролю, по заранее заданной программе изменения координат или путем формирования этих величин в системе управления ЛА, либо каким-то другим способом), мы имеем возможность определить значения кинематических параметров движения в той точке (в том сечении ЛА), в которой они необходимы в данный момент времени, не прибегая к дополнительным измерениям. К тому же все параметры движения представляются в одной системе координат, что очень важно при анализе результатов полета ЛА.
Эффективность предлагаемой системы определяется прежде всего тем, что она позволяет проводить определение как вектора ускорения, так и вектора скорости в любых сечениях ЛА, а не только в выбранных, где размещаются соответствующие измерительные приборы. Кроме того, определенные таким образом кинематические параметры движения в значительно меньшей степени искажены составляющими от движений корпуса ЛА как упругого тела и от местных деформаций, что также является благоприятным обстоятельством.
Источники информации:
1. Никитин Е.А. и Балашова А.А. Проектирование дифференциальных и интегральных гироскопов и акселерометров.
2. Бромберг П.В. Теория инерциальных систем навигации. 1979.
3. Кавинов И.Ф. Инерциальная навигация в околоземном пространстве. 1988.
4. Система измерения векторов ускорения. // Заявка на изобретение N 95105183.





Изобретение относится к измерительной технике. Система осуществляет нахождение векторов скорости и ускорения в произвольной точке летательного аппарат (ЛА). Основным источником информации служат гироинтеграторы, установленные на гиростабилизированной платформе. Возможность определения вектора скорости в любой точке ЛА достигается учетом углового движения ЛА с помощью устройства определения ориентации, измерителя вектора угловой скорости, устройства пересчета проекций вектора из инерциальной системы координат в проекции на связанные оси блока векторного умножения, а также блока перевода вектора из проекций на связанные оси в проекции на оси инерциальной системы координат. Преобразование величин, полученных на выходе блока определения вектора скорости, в ускорении в связанной системе координат обеспечивается блоком обработки линейных скоростей, блоком векторного умножения скоростей и блоком определения вектора ускорения, на выходе которого устанавливаются выходные сигналы первой группы информационных выходов системы. Выходные сигналы второй группы информационных выходов системы формируют блок определения вектора скорости сложением скоростей, вызванных поступательным и вращательным движениями ЛА. Выбор точки ЛА, подлежащей контролю со стороны системы, осуществляется установкой конкретных значений в задатчике координат точки измерения. Система позволяет производить одновременно определение векторов скорости и ускорения в любых сечениях ЛА. 2 н.п. ф-лы, 7 ил.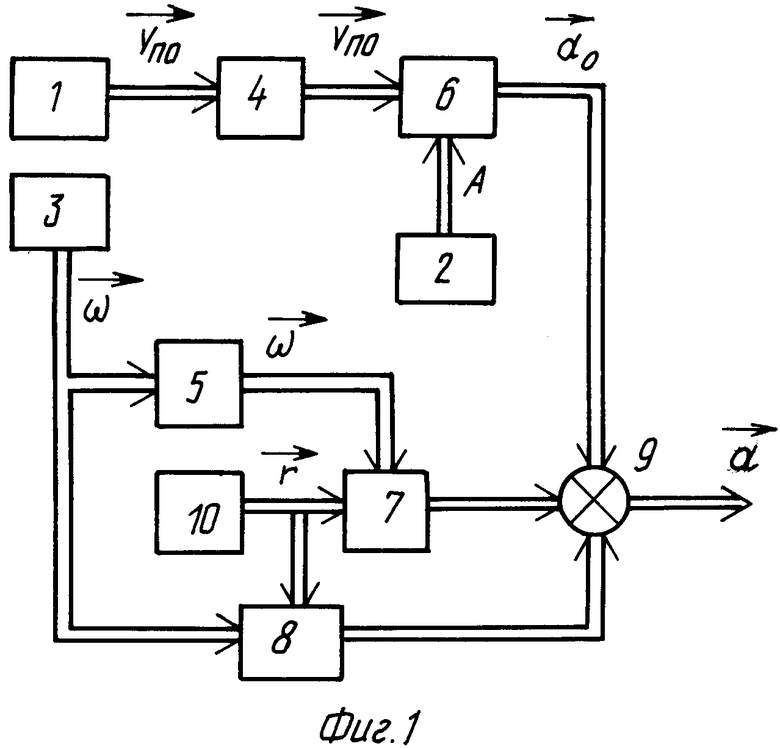
| RU 95105183A, 10.12.96 | |||
| Командно-измерительные приборы/ Под ред.Б.И.Назарова | |||
| - М.: МО СССР, 1975, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| US 4244215, 13.01.81 | |||
| US 3948096 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
