Изобретение относится к области космической техники и может быть использовано для эффективного управления угловым положением космических аппаратов и орбитальных станций.
Наиболее известным способом управления разворотом космического аппарата (КА) является изменение углового его положения путем выполнения последовательных поворотов на определенные углы вокруг осей, жестко связанных с аппаратом [1, с. 85-92, 139-143]. Возможен следующий порядок разворотов - поворот КА вокруг продольной его оси X до совмещения одной из связанных с КА поперечных осей Y или Z с требуемым ее положением в пространстве Yк (или Zк соответственно), а затем поворот вокруг этой поперечной оси до совмещения продольной оси X с заданным положением Xк [2]. Системы управления, реализующие развороты вокруг связанных осей КА широко известны и хорошо изучены. При многих достоинствах подобных систем, включая их простоту и надежность, они имеют один существенный недостаток - такие поворотные маневры имеют большую продолжительность и требуют значительных энергозатрат.
Ближайшим по технической сущности является способ управления разворотом динамически симметричного КА, описанный в [3] и включающий разгон космического аппарата, свободное его вращение и торможение космического аппарата. Его принимаем в качестве прототипа. При этом способе управления предполагается, что космический аппарат движется по коническим траекториям, совершая при этом регулярную прецессию. Движение состоит из участков, где действует максимальный момент m0 (участка разгона и торможения КА) и участка свободного движения, на котором управляющий момент равен нулю.
Определяющими характеристиками процесса разворота являются время разгона (торможения) τ и время свободного движения tсв, которые вычисляются по соотношениям
где J=0,5(J2+J3) - момент инерции КА относительно поперечной оси;
m0 - величина максимального момента управления;
T - заданное время разворота;
β - угол поворота КА вокруг оси прецессии.
Управляющие моменты формируются на участках разгона и торможения исходя из выражения
где  - направление разворота (направление кинетического момента в инерциальном базисе);
- направление разворота (направление кинетического момента в инерциальном базисе);
Λн - кватернион начального положения КА;
Λ - кватернион текущего положения КА.
Знак "+" соответствует участку разгона, а знак "-" - участку торможения. Вектор разворота  однозначно определяется начальным Λн и конечным Λк положениями КА. символ "°" обозначает операцию умножения кватернионов, а
однозначно определяется начальным Λн и конечным Λк положениями КА. символ "°" обозначает операцию умножения кватернионов, а  - кватернион, сопряженный кватерниону Λ.
- кватернион, сопряженный кватерниону Λ.
Приведение КА из начального углового положения Λн в требуемое конечное положение Λк производится следующим образом. Прежде всего определяется кватернион разворота  , исходя из которого вычисляют орт
, исходя из которого вычисляют орт  (вектор разворота) и угол поворота β с учетом инерционных характеристик КА J, J1, где J1 - момент инерции КА относительно продольной оси, Λк - кватернион конечного положения КА.
(вектор разворота) и угол поворота β с учетом инерционных характеристик КА J, J1, где J1 - момент инерции КА относительно продольной оси, Λк - кватернион конечного положения КА.
По заданному времени разворота T и углу поворота β определяют время разгона τ. С момента поступления команды на разворот к КА прикладывают управляющий момент  до тех пор, пока величина фактического кинетического момента
до тех пор, пока величина фактического кинетического момента  не станет равна расчетному значению K0= m0τ. Здесь
не станет равна расчетному значению K0= m0τ. Здесь  . В момент времени, когда
. В момент времени, когда  начинается участок свободного движения КА, на котором управляющий момент отсутствует
начинается участок свободного движения КА, на котором управляющий момент отсутствует  . Через время T - τ с начала разворота производят торможение КА по закону
. Через время T - τ с начала разворота производят торможение КА по закону .
.
В момент времени, когда  разворот, КА будет завершен.
разворот, КА будет завершен.
Недостатком способа-прототипа является низкая точность разворота в случае несимметричного КА при разворотах на большие углы, так как на участке свободного движения не производится контроль углового движения аппарата.
Техническим результатом данного изобретения является существенное повышение точности разворота произвольного КА при относительно низких энергетических затратах.
Указанный технический результат достигается тем, что в предлагаемом способе управления разворотом космического аппарата, включающем определение параметров разворота, формирование и с заданного момента приложение к космическому аппарату разгонного импульса, по окончании участка свободного движения формирование и приложение тормозного импульса, в отличие от прототипа непрерывно измеряют угол разворота между текущим и заданным конечным угловыми положениями ϕк, измеряют угол разворота между текущим и начальным угловыми положениями ϕн, сравнивают его с величиной угла ϕк, в момент выполнения равенства ϕн= ϕк фиксируют текущее угловое положение, сравнивают его с прогнозируемым угловым положением, соответствующим положению космического аппарата в момент равенства ϕн= ϕк для расчетной траектории движения, и определяют кватернион прицелочного положения космического аппарата Λпр по выражению ,
,
где Λк - кватернион заданного конечного углового положения аппарата;
Λ* - кватернион прогнозируемого углового положения аппарата;
Λ0 - кватернион зафиксированного углового положения аппарата;
затем определяют значение кинетического момента  , требуемого для приведения космического аппарата при свободном его вращении в прицелочное положение, сравнивают его с фактическим кинетическим моментом аппарата
, требуемого для приведения космического аппарата при свободном его вращении в прицелочное положение, сравнивают его с фактическим кинетическим моментом аппарата  и в случае
и в случае  прикладывают к аппарату управляющий момент
прикладывают к аппарату управляющий момент
до тех пор, пока  ,
,
где  - фактический кинетический момент космического аппарата;
- фактический кинетический момент космического аппарата; - требуемое значение кинетического момента;
- требуемое значение кинетического момента;
mo - максимальная величина управляющего момента;
с момента равенства фактического кинетического момента  требуемому значению
требуемому значению  измеряют угол разворота между текущим и зафиксированным угловыми положениями ϕ0, в момент выполнения равенства ϕ0= kϕк (1), где k - коэффициент пропорциональности, 0,3≤k≤3; фиксируют текущее угловое положение аппарата, определяют расчетное значение кинетического момента
измеряют угол разворота между текущим и зафиксированным угловыми положениями ϕ0, в момент выполнения равенства ϕ0= kϕк (1), где k - коэффициент пропорциональности, 0,3≤k≤3; фиксируют текущее угловое положение аппарата, определяют расчетное значение кинетического момента  , необходимого для приведения космического аппарата при свободном его вращении в заданное конечное угловое положение, сравнивают его с фактическим кинетическим моментом аппарата
, необходимого для приведения космического аппарата при свободном его вращении в заданное конечное угловое положение, сравнивают его с фактическим кинетическим моментом аппарата  и в случае
и в случае  прикладывают к аппарату управляющий момент
прикладывают к аппарату управляющий момент
до выполнения условия  , с момента равенства фактического кинетического момента
, с момента равенства фактического кинетического момента  расчетному значению
расчетному значению  измеряют угол разворота между текущим и зафиксированным угловыми положениями ϕ0, в момент выполнения равенства (1) фиксируют текущее угловое положение, определяют расчетное значение кинетического момента
измеряют угол разворота между текущим и зафиксированным угловыми положениями ϕ0, в момент выполнения равенства (1) фиксируют текущее угловое положение, определяют расчетное значение кинетического момента  и так до тех пор, пока
и так до тех пор, пока
где ω - величина угловой скорости космического аппарата;
с момента выполнения равенства  к аппарату прикладывают тормозной импульс.
к аппарату прикладывают тормозной импульс.
Сущность предлагаемого способа заключается в управлении угловым движением КА по методу свободных траекторий. Однако при отсутствии контроля фактического вращения КА вплоть до начала торможения ошибка переориентации оказывается недопустимо большой. Уменьшить величину ошибки переориентации возможно за счет приложения импульсов коррекции внутри неуправляемого участка вращения КА. При отсутствии внешних возмущений и параметрических отклонений (когда инерционные характеристики КА известны точно) движение КА может быть спрогнозировано, а требуемый кинетический момент определяется методом последовательных приближений. Причем в процессе прогноза будет получено и расчетное положение КА на момент коррекции Λ* (на момент выдачи корректирующего импульса). Наличие случайных воздействий на КА приводит к отклонению его фактического движения от расчетного. Ошибка между текущими угловыми положениями КА Λ и прогнозируемым его значением Λ* на один и тот же момент времени содержит информацию о неучтенных в математической модели факторах, которая используется при формировании импульса коррекции. Принимаем, что влияние неучтенных возмущающих факторов на угловое положение КА после пройденного участка движения и на оставшейся части траектории одинаково. Поэтому коррекцию движения целесообразно производить в момент прохождения КА половины угла разворота, определяемый условием ϕн= ϕк, где
Прогноз расчетного углового положения КА Λ* делается на тот же момент и удовлетворяет тому же условию
Сама же коррекция сводится к определению траектории свободного движения, проходящей из текущего положения Λ в прицелочное угловое положение Λпр такое, что под влиянием действующих возмущений фактическая траектория движения КА пройдет через заданное положение Λк. Закон наведения для осуществления коррекции траектории свободного движения следующий. В момент времени, когда КА развернулся на половину требуемого угла разворота  его фактическое угловое положение Λ сравнивается с расчетным Λ*, определяется ошибка
его фактическое угловое положение Λ сравнивается с расчетным Λ*, определяется ошибка  , которая вводится в расчет прицелочного кватерниона Λпр, и рассчитывается такой кинетический момент
, которая вводится в расчет прицелочного кватерниона Λпр, и рассчитывается такой кинетический момент  , который обеспечит разворот КА из текущего положения Λ в требуемое Λпр. Выдается импульс кинетического момента
, который обеспечит разворот КА из текущего положения Λ в требуемое Λпр. Выдается импульс кинетического момента  .
.
Прицелочные параметры Λпр выбираются из условия:
т. е.  , где Λ0 - кватернион зафиксированного углового положения аппарата.
, где Λ0 - кватернион зафиксированного углового положения аппарата.
Задача определения требуемого кинетического момента КА  на начало неуправляемого участка может быть решена методом последовательных приближений.
на начало неуправляемого участка может быть решена методом последовательных приближений.
Однако при поворотах на большие углы (более 90o) и наличии значительной неопределенности инерционных характеристик КА (ошибка в знании значений моментов инерции имеет порядок 5 - 10% от их номинальных значений) одной коррекции недостаточно. Повышение точности разворота достигается увеличением числа коррекций траектории движения КА. Здесь используется принцип итеративного наведения, заключающийся в постоянной корректировке углового движения КА в определенные моменты времени. Коррекция движения КА сводится к определению требуемого для приведения в конечное положение Λк кинетического момента  и сообщения поправочного импульса
и сообщения поправочного импульса  к имеющемуся кинетическому моменту КА
к имеющемуся кинетическому моменту КА  , если отличается от расчетного
, если отличается от расчетного  . Моменты проведения коррекции определяются условием ϕ0= kϕк, где
. Моменты проведения коррекции определяются условием ϕ0= kϕк, где  .
.
Коэффициент k находится в диапазоне 0,3 - 3. При k > 3 последняя коррекция углового движения КА будет производится при угле рассогласования ϕк> 4ϑт, где ϑт - угол доворота, осуществляемого при торможении КА. Учитывая, что для КА типа орбитальной станции ϑт имеет порядок 7 - 10o, неуправляемое движение КА будет осуществляться соответственно на 30 - 40o, что может оказаться недопустимым с точки зрения обеспечения требуемой точности ориентации. При k < 0,3 коррекции вблизи конечного положения Λк становятся неоправданно частыми (за поворот КА на угол Δϕ возмущения не успевают вызвать заметное отклонение углового движения КА от расчетной траектории) Кроме того, нижняя граница k обусловлена и быстродействием бортового вычислителя (временем расчета  ).
).
Особенность заявляемого способа заключается в специальной организации и проведении коррекции траектории свободного движения реального КА в процессе неуправляемого его вращения из произвольного начального Λн в заданное конечное угловое положение Λк. Весь разворот делится на чередующиеся управляемые и неуправляемые участки и включает в себя участки разгона и торможения, участки свободного движения  и кратковременные участки коррекции траектории. Переход от одного неуправляемого участка к другому осуществляется корректирующим импульсом кинетического момента. При этом момент приложения к КА этого импульса, его величина и направление выбираются такими, чтобы ошибка приведения КА в требуемое положение была достаточно малой даже в условиях действия значительных возмущений и при разворотах на большие углы. Задача управления состоит в обеспечении для неуправляемых участков таких начальных условий, при которых движение по прогнозу проходит через конечное положение Λк. Для этого на начало каждого участка Λ0 определяется кватернион разворота
и кратковременные участки коррекции траектории. Переход от одного неуправляемого участка к другому осуществляется корректирующим импульсом кинетического момента. При этом момент приложения к КА этого импульса, его величина и направление выбираются такими, чтобы ошибка приведения КА в требуемое положение была достаточно малой даже в условиях действия значительных возмущений и при разворотах на большие углы. Задача управления состоит в обеспечении для неуправляемых участков таких начальных условий, при которых движение по прогнозу проходит через конечное положение Λк. Для этого на начало каждого участка Λ0 определяется кватернион разворота  , по которому определяются требуемые начальные условия для следующего участка. В отличие от ближайшего аналога (прототипа) краевая задача перевода твердого тела по траектории свободного движения из одного известного углового положения в другое известное угловое положение решается неоднократно.
, по которому определяются требуемые начальные условия для следующего участка. В отличие от ближайшего аналога (прототипа) краевая задача перевода твердого тела по траектории свободного движения из одного известного углового положения в другое известное угловое положение решается неоднократно.
Для обеспечения требуемой точности разворота тормозной импульс выдают в момент, когда  . Тормозной импульс направлен против фактического кинетического момента. Контроль за разворотом производится по углам отклонения КА от начального ϕн и до конечного ϕк угловых положений. Следует отметить, что сами измерения углов ϕн, ϕк и ϕ0 известны, их производили и ранее. Однако в предлагаемом способе указанные измерения производят одновременно и с другой целью - для определения момента проведения коррекции. Момент начала торможения КА определяется тоже по-новому - путем измерения угла ϕк и проверки условия
. Тормозной импульс направлен против фактического кинетического момента. Контроль за разворотом производится по углам отклонения КА от начального ϕн и до конечного ϕк угловых положений. Следует отметить, что сами измерения углов ϕн, ϕк и ϕ0 известны, их производили и ранее. Однако в предлагаемом способе указанные измерения производят одновременно и с другой целью - для определения момента проведения коррекции. Момент начала торможения КА определяется тоже по-новому - путем измерения угла ϕк и проверки условия  .
.
Таким образом, управление разворотом КА в предлагаемом способе сводится к следующему:
1) разгон КА с максимальным управляющим моментом  до требуемого кинетического момента K0= m0τ.
до требуемого кинетического момента K0= m0τ.  соответствует траектории разворота из Λн в Λк;
соответствует траектории разворота из Λн в Λк;
2) неуправляемое вращение КА  до момента, когда ϕн= ϕк;
до момента, когда ϕн= ϕк;
3) коррекция траектории свободного движения с целью прохождения КА по прогнозу через положение  , для чего определяют новый требуемый кинетический момент
, для чего определяют новый требуемый кинетический момент  и сообщают импульс
и сообщают импульс  ;
;  соответствует попадающей траектории из Λ0 в Λпр;
соответствует попадающей траектории из Λ0 в Λпр;
4) неуправляемое вращение КА по траектории свободного движения до выполнения равенства ϕ0= kϕк;
5) проверяют условие (1); в момент его выполнения фиксируют текущее угловое положение КА и производят коррекцию траектории вращения КА, которая заключается в определении расчетного значения вектора кинетического момента  , необходимого для приведения КА при свободном его вращении из зафиксированного углового положения Λ0 в заданное конечное угловое положение Λк и приложении к космическому аппарату управляющего момента
, необходимого для приведения КА при свободном его вращении из зафиксированного углового положения Λ0 в заданное конечное угловое положение Λк и приложении к космическому аппарату управляющего момента
где  - фактический кинетический момент аппарата;
- фактический кинетический момент аппарата;
до совмещения фактического кинетического момента аппарата с расчетным его значением  ; после выполнения условия
; после выполнения условия  происходит свободное движение КА
происходит свободное движение КА  ;
;
действия 4, 5 повторяются, пока  ;
;
6) в момент выполнения равенства  начинают гашение угловой скорости КА (торможение КА) с максимальным управляющим моментом
начинают гашение угловой скорости КА (торможение КА) с максимальным управляющим моментом .
.
Управляющий момент направлен против фактического кинетического момента и действует пока последний не станет равным нулю.
Предлагаемое сочетание свободного разворота с кратковременными корреляциями позволяет при довольно низком расходе топлива добиваться большой точности разворота при любых неизвестных возмущениях. Экономичность разворота достигается тем, что на большей части траектории управление отсутствует  , а повышение точности обеспечивается организацией и проведением в определенные дискретные моменты времени кратковременных коррекций углового движения аппарата. Причем на первой коррекции привлекается прогнозируемое положение КА Λ*, соответствующее расчетной траектории движения КА.
, а повышение точности обеспечивается организацией и проведением в определенные дискретные моменты времени кратковременных коррекций углового движения аппарата. Причем на первой коррекции привлекается прогнозируемое положение КА Λ*, соответствующее расчетной траектории движения КА.
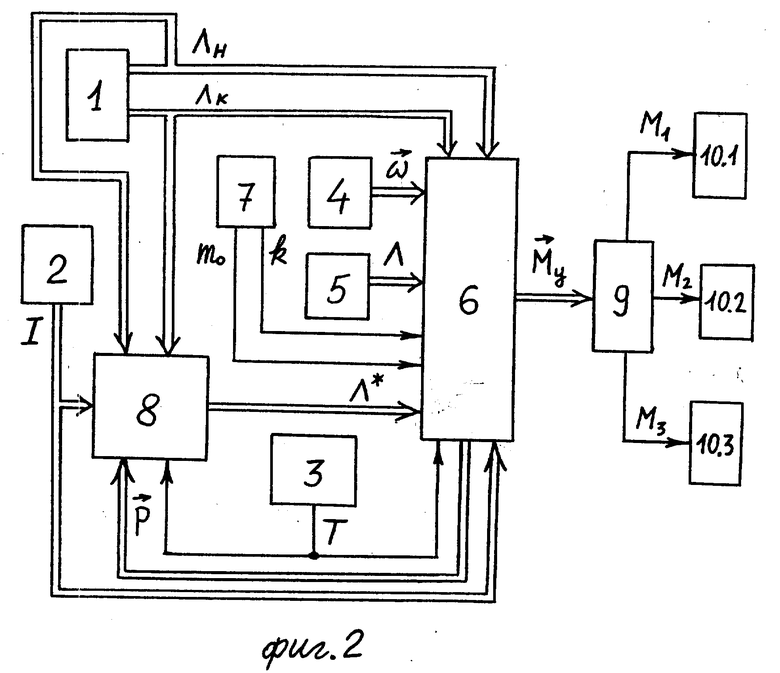
Графики изменения величины управляющего момента в процессе разворота по способу-прототипу и по новому способу приведены на фиг. 1.
Отличительной особенностью описанного способа является прогноз движения фактически несимметричного KA и определение расчетного углового положения на определенный момент, организация измерений необходимых угловых величин ϕн, ϕк и ϕ0 для оптимального выбора момента проведения коррекции движения KA, алгоритм определения прицелочных параметров Λпр для расчета траектории движения КА после первой коррекции и формирование необходимого для осуществления коррекции управляющего момента. Расчет требуемого кинетического момента  носит итерационный характер и описывается алгоритмом
носит итерационный характер и описывается алгоритмом
где μ - прогнозируемое угловое положение KA на момент окончания разворота, полученное модулированием движения KA.
На фиг. 1 даны временные диаграммы управляющих воздействий; на фиг. 2 - функциональная схема системы для реализации способа.
Пример реализации предложенного способа представлен на фиг. 2, где обозначено 1 - устройство ввода и хранения начального и конечного положений KA (УВХНКП), 2 - блок задатчиков моментов инерции КА (БЗМИ), 3 - устройство ввода времени разворота (УВВР), 4 - блок датчиков угловых скоростей (БДУС), 5 - бесплатформенная инерциальная навигационная система (БИНС), 6 - вычислительное устройство (ВУ), 7 - блок хранения коэффициентов закона управления (БХКЗУ), 8 - блок прогноза углового положения KA (БПУП), 9 - согласующе-преобразующее устройство (СПУ), 10 - исполнительные органы (ИО), при этом первый выход УВХНКП 1 связан с первым входом ВУ 6 и первым входом БПУП 8, второй выход УВХНКП 1 связан со вторым входом ВУ 6 и первым входом БПУП 8, второй выход УВХНКП 1 связан со вторым входом ВУ 6 и со вторым входом БПУП 8, выход БЗМИ 2 связан с третьим входом ВУ 6 и третьим входом БПУП 8, выход УВВР 3 связан с четвертым входом ВУ 6 и четвертым входом БПУП 8, выход БДУС 4 связан с пятым входом ВУ 6, выход БИНС 5 связан с шестым входом ВУ 6, первый выход ВУ 6 связан с входом СПУ 9, второй выход ВУ 6 связан с пятым входом БПУП 8, первый выход БХКЗУ 7 связан с седьмым входом ВУ 6, второй выход БХКЗУ 7 связан с восьмым входом ВУ 6, выход БПУП 8 связан с девятым входом ВУ 6, первый выход СПУ 9 связан с исполнительными органами первого канала, второй выход СПУ 9 связан с исполнительными органами второго канала, третий выход СПУ 9 связан с исполнительными органами третьего канала.
В качестве задатчиков моментов инерции могут быть использованы стандартные схемы ввода и хранения аналоговой информации либо источники постоянного напряжения заданной величины, либо постоянное запоминающее устройство (в простейшем случае, когда конфигурация КА не меняется и его моменты инерции можно считать постоянными).
Вычислительное устройство реализуется в виде моноблока (электронной платы) или БЦВМ с соответствующим программным обеспечением, хранящемся в постоянном запоминающем устройстве.
Блок прогноза углового положения КА может быть выполнен в форме электронной микросборки из стандартных аналоговых модулей и интегральных микросхем или в виде заказной специализированной сверхбольшой интегральной схемы.
Согласующе-преобразующее устройство по заданному значению управляющего момента, поступающему на вход, формирует соответствующие ему команды на исполнительные органы.
В системе автоматически определяется кинетический момент, обеспечивающий перевод КА из исходного Λн в желаемое положение Λк с допустимой точностью, автоматически делается прогноз углового положения КА на момент первой коррекции, а команда на торможение формируется исходя из фактических условий движения КА.
Отличием предложенных технических решений является наличие математической модели фактически несимметричного КА, а также организация и выполнение на этапе между разгоном и торможением импульсных коррекций движения КА. При проведении коррекции свободного вращения аппарата момент управления  формируется по отклонению кинетического момента
формируется по отклонению кинетического момента  .
.
Необходимо заметить, что движение КА существенно отличается от регулярной прецессии (т.к. КА не обладает динамической симметрией) и вектор разворота  не может быть найден аналитически. Однако, имея математическую модель фактического КА и применяя метод последовательных приближений, можно определить для любых начального Λн и конечного Λк положений КА и времени разворота T направление вектора кинетического момента
не может быть найден аналитически. Однако, имея математическую модель фактического КА и применяя метод последовательных приближений, можно определить для любых начального Λн и конечного Λк положений КА и времени разворота T направление вектора кинетического момента  , соответствующего траектории свободного движения КА, проходящей через Λн и Λк.
, соответствующего траектории свободного движения КА, проходящей через Λн и Λк.
Космический аппарат характеризуется прежде всего инерционными характеристиками J1, J2, J3. Начальное и конечное угловые положения задаются кватернионами Λн и Λк. Определение орта  - вектора разворота, соответствующего полодии, проходящей через начальное и конечное угловые положения, и обеспечивающего перевод КА в заданное положение Λк при свободном его вращении, осуществляется методом последовательных приближений. В качестве первого приближения
- вектора разворота, соответствующего полодии, проходящей через начальное и конечное угловые положения, и обеспечивающего перевод КА в заданное положение Λк при свободном его вращении, осуществляется методом последовательных приближений. В качестве первого приближения  принимается значение вектора разворота, соответствующего развороту динамически симметричного тела на кватернион Λр, которое вычисляется в результате решения системы уравнений
принимается значение вектора разворота, соответствующего развороту динамически симметричного тела на кватернион Λр, которое вычисляется в результате решения системы уравнений
где J, J1 - моменты инерции КА;
ν0,ν1,ν2, ν3 - компоненты кватерниона разворота  .
.
Математическая модель вращательного движения КА имеет вид
где  - момент внешних сил;
- момент внешних сил; - вектор угловой скорости;
- вектор угловой скорости; - кинетический момент КА, I - тензор инерции КА.
- кинетический момент КА, I - тензор инерции КА.
Здесь "х" означает векторное произведение векторов.
Моделируя движение КА с начальными условиями
где β - угол поворота, соответствующий вектору разворота;
J - момент инерции КА относительно поперечной оси;
T - время разворота;
и учитывая, что  , определим промах разворота
, определим промах разворота  .
.
Введя полученный промах ΔΛ в качестве поправки к предыдущему кватерниону разворота, определим новые параметры разворота  и соответствующие ему
и соответствующие ему  . Схема итерационного процесса проста
. Схема итерационного процесса проста  . Вектор
. Вектор  будет определен, когда Sgal(ΔΛ > εдоп. Направление разворота
будет определен, когда Sgal(ΔΛ > εдоп. Направление разворота  . Величина кинетического момента определяется управляющими возможностями системы исполнительных органов m0, моментом инерции относительно поперечной оси J, углом поворота β и заданным временем разворота T.
. Величина кинетического момента определяется управляющими возможностями системы исполнительных органов m0, моментом инерции относительно поперечной оси J, углом поворота β и заданным временем разворота T.
На участках разгона и торможения управляющие моменты максимальны, а на участках коррекции траектории углового движения КА управляющий момент носит импульсный характер.
На участке неуправляемого движения КА после первой коррекции контроль движения КА осуществляют проверкой условия (1). В момент его выполнения производят коррекцию углового движения КА путем целенаправленного изменения его кинетического момента. Для этого определяют такое расчетное значение вектора кинетического момента  , при котором КА при свободном его вращении из текущего углового положения Λ(t) перейдет в заданное конечное угловое положение Λк, и затем прикладывают к корпусу КА управляющий момент
, при котором КА при свободном его вращении из текущего углового положения Λ(t) перейдет в заданное конечное угловое положение Λк, и затем прикладывают к корпусу КА управляющий момент
до установления равенства  . Как только фактический кинетический момент
. Как только фактический кинетический момент  станет равен расчетному значению
станет равен расчетному значению  аппарат предоставляют самому себе до следующей коррекции (до очередного выполнения условия (1)). Расчетное значение вектора кинетического момента
аппарат предоставляют самому себе до следующей коррекции (до очередного выполнения условия (1)). Расчетное значение вектора кинетического момента  , где
, где  - вектор разворота, K - величина фактического кинетического момента на момент выполнения условия (1).
- вектор разворота, K - величина фактического кинетического момента на момент выполнения условия (1).
Определение вектора разворота  сводится к решению краевой задачи Λ(0) = Λ0, Λ(T) = Λк при имеющихся дифференциальных связях, накладываемых на движение КА
сводится к решению краевой задачи Λ(0) = Λ0, Λ(T) = Λк при имеющихся дифференциальных связях, накладываемых на движение КА
Отметим, что вычислительное устройство производит все математические операции, необходимые для реализации способа, и содержит в себе математическую модель углового движения КА. По начальному и конечному положениям КА и его инерционным характеристикам ВУ 6 осуществляют расчет требуемого кинетического момента  по методу итераций. Отклонение прогнозируемого положения КА μ(T) от требуемого Λк определяется путем математического моделирования в ВУ 6. В качестве вычислительного устройства может быть использована БЦВМ, но тогда в систему необходимо ввести интерфейс сопряжения и обмена информацией с измерительными приборами и исполнительными органами.
по методу итераций. Отклонение прогнозируемого положения КА μ(T) от требуемого Λк определяется путем математического моделирования в ВУ 6. В качестве вычислительного устройства может быть использована БЦВМ, но тогда в систему необходимо ввести интерфейс сопряжения и обмена информацией с измерительными приборами и исполнительными органами.
Моменты времени, в которые производят коррекцию углового движения КА, определяются ВУ 6 логической проверкой условия (1).
Работает система, реализующая предлагаемый способ управления пространственным разворотом КА, следующим образом. По значениям моментов инерции КА J1, J2, J3 ВУ 6 вычисляет значение момента инерции вокруг поперечной оси J согласно выражению .
.
Далее по начальному Λн и конечному Λк положениям КА, заданному времени разворота T и инерционным характеристикам J1, J2, J3 в ВУ 6 осуществляется расчет вектора разворота  (путем решения краевой задачи) и соответствующего ему угла поворота β. Исходя из него ВУ 6 определяет время разгона τ по выражению
(путем решения краевой задачи) и соответствующего ему угла поворота β. Исходя из него ВУ 6 определяет время разгона τ по выражению
и расчетную величину кинетического момента K0= m0τ.
По вектору разворота  БПУП 8 путем математического моделирования уравнений движения КА с начальными условиями Λ(0) = Λн ,
БПУП 8 путем математического моделирования уравнений движения КА с начальными условиями Λ(0) = Λн ,
где  ;
;
определяют расчетное угловое положение КА Λ* на момент времени, когда ϕн= ϕк.
В исходном состоянии  выход вычислительного устройства замаскирован и
выход вычислительного устройства замаскирован и  . В момент поступления команды на разворот ВУ 6 формирует управляющий момент
. В момент поступления команды на разворот ВУ 6 формирует управляющий момент  , который прикладывают к КА посредством ИО 10. Расчет текущего кинетического момента
, который прикладывают к КА посредством ИО 10. Расчет текущего кинетического момента  ВУ 6 производит непрерывно по показаниям ДУС 4
ВУ 6 производит непрерывно по показаниям ДУС 4  и моментам инерции Jj: Kj= Jjωj. Как только КА будет сообщен кинетический момент расчетной величины K0 выход ВУ 6 маскируется, управляющие моменты отсутствуют
и моментам инерции Jj: Kj= Jjωj. Как только КА будет сообщен кинетический момент расчетной величины K0 выход ВУ 6 маскируется, управляющие моменты отсутствуют  и КА производит свободное вращение. По информации БИНС 5 Λ ВУ 6 непрерывно определяет значения углов ϕн, ϕк. В момент, когда ϕн= ϕк, ВУ 6 фиксирует текущее угловое положение КА. Сравнивая фактическое угловое положение Λ0 с расчетным Λ* ВУ 6 определяет кватернион прицелочного положения Λпр и кватернион разворота
и КА производит свободное вращение. По информации БИНС 5 Λ ВУ 6 непрерывно определяет значения углов ϕн, ϕк. В момент, когда ϕн= ϕк, ВУ 6 фиксирует текущее угловое положение КА. Сравнивая фактическое угловое положение Λ0 с расчетным Λ* ВУ 6 определяет кватернион прицелочного положения Λпр и кватернион разворота  , исходя из которого вычисляет требуемое значение кинетического момента
, исходя из которого вычисляет требуемое значение кинетического момента  . ИО 10 сообщает КА корректирующий импульс путем приложения управляющего момента
. ИО 10 сообщает КА корректирующий импульс путем приложения управляющего момента ,
,
рассчитываемого в ВУ 6.
Как только  , выход ВУ 6 маскируется, управляющие моменты отсутствуют
, выход ВУ 6 маскируется, управляющие моменты отсутствуют  и КА производит свободное вращение до момента времени, когда ϕ0= kϕк. В момент выполнения условия (1) ВУ 6 фиксирует текущее угловое положение КА, определяет кватернион разворота
и КА производит свободное вращение до момента времени, когда ϕ0= kϕк. В момент выполнения условия (1) ВУ 6 фиксирует текущее угловое положение КА, определяет кватернион разворота  , исходя из которого методом последовательных приближений рассчитывает вектор разворота
, исходя из которого методом последовательных приближений рассчитывает вектор разворота  и расчетное значение вектора кинетического момента
и расчетное значение вектора кинетического момента  , где K - величина фактического кинетического момента. ИО 10 сообщают КА корректирующий импульс
, где K - величина фактического кинетического момента. ИО 10 сообщают КА корректирующий импульс  путем приложения управляющего момента
путем приложения управляющего момента ,
,
рассчитываемого в ВУ 6.
Как только  выход ВУ 6 маскируется, управляющие моменты отсутствуют
выход ВУ 6 маскируется, управляющие моменты отсутствуют  и КА производит свободное вращение до следующего выполнения условия (1). В момент равенства
и КА производит свободное вращение до следующего выполнения условия (1). В момент равенства  производят торможение КА; управляющие моменты формируются исходя из выражения
производят торможение КА; управляющие моменты формируются исходя из выражения
Когда  выход ВУ 6 маскируется, исполнительные органы отключены, разворот завершен. Система готова к следующему развороту КА.
выход ВУ 6 маскируется, исполнительные органы отключены, разворот завершен. Система готова к следующему развороту КА.
Временные диаграммы приведены на фиг. 1.
Данная схема разворота снижает влияние внешних возмущающих моментов на точность разворота. Способ предусматривает прогноз углового движения КА и расчет его углового положения на момент первой коррекции. Расход рабочего тела на корректирующие импульсы незначителен. Моменты проведения коррекций определяются системой управления автоматически по фактическим кинематическим параметрам движения КА.
На основании результатов математического моделирования серии разворота КА были получены среднестатистические оценки точности приведения КА в заданное конечное положение для способа-прототипа и предлагаемого спосба управления разворотом КА. В качестве основного неучтенного возмущения принималось отклонение фактических моментов инерции КА от расчетных (ΔJs= 0,1Js). Номинальные значения принимались равными:
J1 = 40000 кг•м2, J2 = 180000 кг•м2, J3 = 170000 кг•м2.
Фактические моменты инерции КА были следующими:
J1 = 36000 кг•м2, J2 = 188000 кг•м2, J3 = 163000 кг•м2.
При развороте КА на 80 - 100o ошибки ориентации составили:
для способа-прототипа - Δϕ≈7o
для предлагаемого способа - Δϕ≈0,2o
При разворотах КА на углы большие 100 - 120o ошибка переориентации КА при двухимпульсном управлении (прототипе) еще более возрастает (более 8 - 10o), в то время как в предлагаемом способе точность остается неизменной.
Эффективность предлагаемого способа определяется прежде всего тем, что на большей части траектории движения управляющий момент равен нулю, что экономит топливо. Вместе с тем, в способе реализован принцип управления с обратной связью, что и обеспечивает высокую точность разворота в условиях действия значительных внешних возмущающих моментов.
Литература
1. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией КА, М., 1974.
2. Алексеев К.Б., Бебенин Г.Г. Управление космическими ЛА. М., 1974, с. 22.
3. Бранец В.Н., Черток М.Б., Казначеев Ю.В. "Оптимальный разворот твердого тела с одной осью симметрии". // Космические исследования, 1984, т. 22, вып. 3, с. 352 - 360.
Использование: космонавтика. Сущность: в предлагаемом способе производят определение параметров разворота, с заданного момента времени разгон космического аппарата, свободное его вращение и торможение космического аппарата. Причем на этапе между разгоном и торможением непрерывно измеряют угол разворота между текущим и заданным конечным угловыми положениями, измеряют угол разворота между текущим и начальным угловыми положениями, в момент их равенства фиксируют текущее угловое положение, сравнивают его с расчетным положением на тот же момент, определяют параметры прицелочного положения и производят коррекцию углового движения аппарата с тем, чтобы он занял про прогнозу прицелочное положение. Далее измеряют угол разворота между текущим и зафиксированным угловыми положениями. В момент превышения им угла отклонения от конечного положения более чем в заданное число раз корректируют угловое движение аппарата. Коррекции состоят в определении расчетного значения кинетического момента, необходимого для приведения КА при свободном его вращении из текущего углового положения в заданное конечное угловое положение, и приложении к КА импульса управляющего момента до совмещения фактического кинетического момента аппарата с расчетным его значением. Расчетное значение кинетического момента определяется автоматически из решения краевой кинематической задачи ориентации методом последовательных приближений с прогнозированием. 2 ил.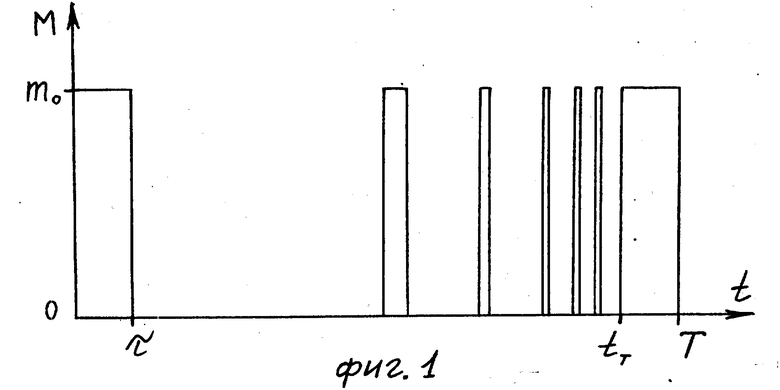
Способ управления разворотом космического аппарата, включающий определение параметров разворота, формирование и с заданного момента приложение к космическому аппарату разгонного импульса, по окончании участка свободного движения формирование и приложение тормозного импульса, отличающийся тем, что непрерывно измеряют угол разворота между текущим и заданным конечным угловым положениями ϕк, измеряют угол разворота между текущим и начальным угловыми положениями ϕн, сравнивают его с величиной угла ϕк, в момент выполнения равенства ϕн= ϕк фиксируют текущее угловое положение, сравнивают его с прогнозируемым угловым положением, соответствующим положению космического аппарата в момент равенства ϕн= ϕк для расчетной траектории движения, и определяют кватернион прицелочного положения космического аппарата Λпр по выражению
где Λк - кватернион заданного конечного углового положения аппарата;
Λ* - кватернион прогнозируемого углового положения аппарата;
Λ0 - кватернион зафиксированного углового положения аппарата,
затем определяют значение кинетического момента  требуемого для приведения космического аппарата при свободном его вращении в прицелочное положение, сравнивают его с фактическим кинетическим моментом аппарата
требуемого для приведения космического аппарата при свободном его вращении в прицелочное положение, сравнивают его с фактическим кинетическим моментом аппарата  и в случае
и в случае  прикладывают к аппарату управляющий момент
прикладывают к аппарату управляющий момент
до тех пор, пока 
где  фактический кинетический момент космического аппарата;
фактический кинетический момент космического аппарата; требуемое значение кинетического момента;
требуемое значение кинетического момента;
m0 максимальная величина управляющего момента,
с момента равенства фактического кинетического момента  требуемому значению
требуемому значению  измеряют угол разворота между текущим и зафиксированным угловыми положениями ϕ0, в момент выполнения равенства ϕ0= kϕк где k коэффициент пропорциональности, 0,3 ≤ k ≤ 3, фиксируют текущее угловое положение аппарата, определяют расчетное значение кинетического момента
измеряют угол разворота между текущим и зафиксированным угловыми положениями ϕ0, в момент выполнения равенства ϕ0= kϕк где k коэффициент пропорциональности, 0,3 ≤ k ≤ 3, фиксируют текущее угловое положение аппарата, определяют расчетное значение кинетического момента  необходимого для приведения космического аппарата при свободном его вращении в заданное конечное угловое положение, сравнивают его с фактическим кинематическим моментом аппарата
необходимого для приведения космического аппарата при свободном его вращении в заданное конечное угловое положение, сравнивают его с фактическим кинематическим моментом аппарата  и в случае
и в случае  прикладывают к аппарату управляющий момент
прикладывают к аппарату управляющий момент
до выполнения условия  с момента равенства фактического кинетического момента
с момента равенства фактического кинетического момента  расчетному значению
расчетному значению  измеряют угол разворота между текущим и зафиксированным угловыми положениями ϕ0, в момент выполнения равенства ϕ0 = kϕк фиксируют текущее угловое положение, определяют расчетное значение кинетического момента Кр, и так до тех пор, пока
измеряют угол разворота между текущим и зафиксированным угловыми положениями ϕ0, в момент выполнения равенства ϕ0 = kϕк фиксируют текущее угловое положение, определяют расчетное значение кинетического момента Кр, и так до тех пор, пока  где ω - величина угловой скорости космического аппарата с момента выполнения равенства
где ω - величина угловой скорости космического аппарата с момента выполнения равенства  к аппарату прикладывают тормозной импульс.
к аппарату прикладывают тормозной импульс.
| Бранец В.Н., Черток М.Б., Казначеев Ю.В | |||
| Оптимальный разворот твердого тела с одной осью симметрии | |||
| - Космические исследования, 1984, т | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Судно | 1918 |
|
SU352A1 |
