Изобретение относится к киносъемочной технике и предназначено для автоматического измерения расстояния до объекта съемки и последующей фокусировки этого объекта среди группы ему аналогичных.
Известно несколько принципиально различных измерительных устройств: линейные измерители, непосредственно сравниваемые с расстоянием (ленты, проволоки); измерители, построенные на измерении времени распространения волновых колебаний различной природы, например, акустические, световые, электромагнитные и др. [I]
Известны дальномерные устройства геометрического типа [2]
Недостатками указанных устройств являются: для непосредственных линейных измерителей чрезвычайная громоздкость измерений; для измерителей, преобразующих время распространения волн в расстояние, необходимость идентификации отражающего сигнала от заданного конкретного объекта соответствующего отражателя (при существенных дистанциях до цели) для получения необходимой мощности отраженного сигнала. Для дальномеров геометрического типа возможность автоматического выделения объекта съемки и построение геометрического треугольника.
Наиболее близким техническим решением к изобретению является устройство для автоматического измерения расстояния до заданного объекта [3]
В основу изобретения поставлена задача повышения точности и дальности измерения расстояния до конкретно избираемого объекта съемки за счет расположения змерительной станции на платформе, автоматически следящей за избранным объектом съемки, на котором устанавливается марка (инфракрасный излучатель), являющийся одновременно источником излучения, за которым следит оптико-электронная система измерительной станции.
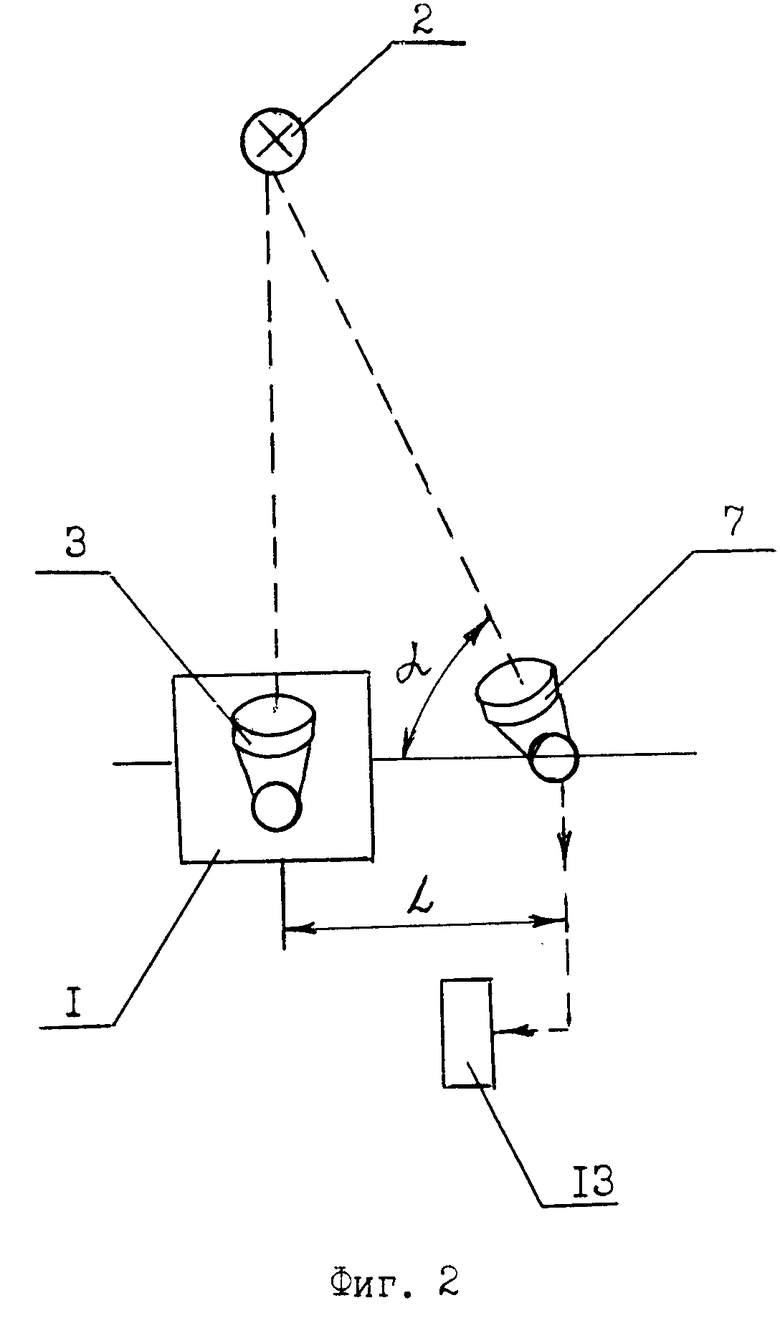
На фиг. 1 показан общий вид устройства; на фиг. 2 геометрическая схема.
Сущность изобретения состоит в том, что устройство для автоматического измерения расстояния до заданного объекта (фиг. 1) содержит трехосную платформу 1 со съемочной аппаратурой (не показано), следующую за многочастотным маячком 2 инфракрасным излучателем, укрепленным на объекте съемки, с управлением от оптико-электронной системы 3 с четырехплощадочным фотоприемником посредством двигателей 4, 5, 6, вторую оптико-электронную систему 7 с четырехплощадочным фотоприемником, укрепленную на расстоянии L от центра вращения платформы 1 и имеющую возможность слежения посредством двигателей 8, 9 за многочастотным маячком 2, и имеющую датчики 10, 11 углов ее поворота, вычислительный блок 12 управления указанными элементами. Указанные элементы образуют в пространстве совместно с маячком на объекте съемки внутрибазный автоматический дальномер, выходной сигнал с которого посредством привода 13 связан с фокусировочным кольцом объектива 14 съемочной камеры, а информация о дальности индицируется на дисплее 15.
Устройство для автоматического измерения расстояния до заданного объекта съемки работает следующим образом.
Перед началом работы на объект съемки устанавливается маячок, включается его питание и электропитание всей системы. Затем по сигналам с вычислительного блока 12 включается режим сканирования обеих оптико-электронных систем 3 и 7. Каждая оптико-электронная система работает по маячку на своей частоте излучения и, когда это излучение попадает на соответствующие фотоприемники, сканирование прекращается. При этом по сигналам с того же вычислительного блока 12 обеспечивается по сигналам от оптико-электронной системы 3 посредством двигателей 4, 5, и 6 непрерывное слежение (разворот платформы 1) за перемещающимся маячком 2 (объектом), а по сигналам с оптико-электронной системы 7 разворот этой системы вслед за перемещающимся маячком, при этом с датчиков 10, 11 поступают в вычислительный блок сигналы, где с учетом расстояния L осуществляется вычисление расстояния D до маячка (объекта съемки).
Формула вычисления имеет вид:
D = L•tgα
Наличие нескольких частот излучения маячков позволяет при необходимости создавать определенный параллакс между осями оптико-электронных систем, переключение частот излучения позволяет исключать случайные ошибки измерения дальности, а также увеличить надежность системы в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ ДВУМЯ ОБЪЕКТАМИ | 1995 |
|
RU2116621C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗ СИГНАЛА ФОТОПРИЕМНИКА СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННЫХ СЛЕДЯЩИХ СИСТЕМ | 1999 |
|
RU2173861C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ | 2014 |
|
RU2583877C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2011 |
|
RU2467285C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ | 1995 |
|
RU2097814C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАЛЬНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТОВ | 1999 |
|
RU2169373C2 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда и комплексированная система для его реализации | 2021 |
|
RU2770951C1 |
| КОМБИНИРОВАННАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2014 |
|
RU2541494C1 |
Использование: кинофототехника. Сущность изобретения: устройство содержит автоматическую следящую трехосную платформу 1 и инфракрасный многочастотный маяк 2, две оптико-электронные системы 3 и 7, двигатели 4, 5, 6 управления платформой 1, двигатели 8, 9 управления разворотом оптико-электронной системы 7, датчики углов 10, 11 оптико-электронной системы 7, вычислительный блок 12, привод 13 управления фокусировочным кольцом 14 объектива съемочной камеры и дисплей 15. 2 ил.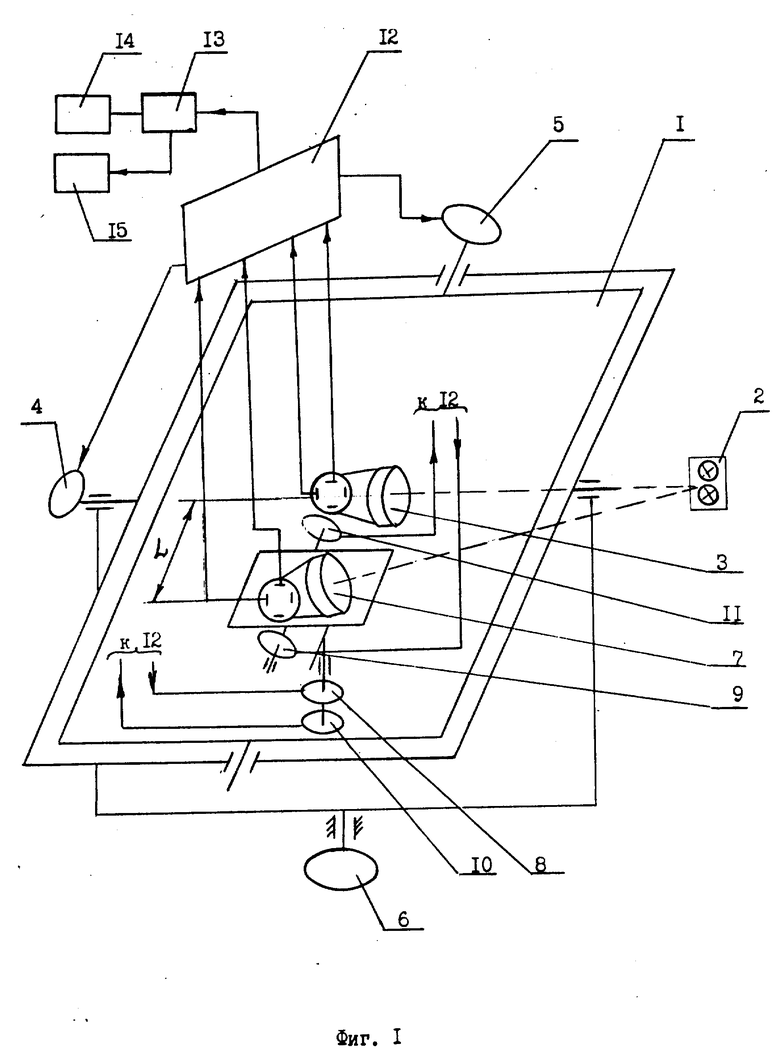
Устройство автоматического измерения расстояния до заданного объекта, состоящее из инфракрасного излучателя, укрепленного на объекте съемки, трехосной следящей за ним платформы с установленной на ней оптико-электронной системой с четырехплощадочным фотоприемником, управляющей платформой, отличающееся тем, что в него введена вторая оптико-электронная система с четырехплощадочным фотоприемником, расположенная на определенном расстоянии от центра вращения трехосной следящей платформы и установленная с возможностью слежения за инфракрасным излучателем, при этом вторая оптико-электронная система связана с датчиками углов ее поворота относительно трехосной следящей платформы и электрически соединена с устройством вычисления расстояния до инфракрасного излучателя.
| Елисеев С.В | |||
| Геодезические инструменты и приборы | |||
| - М.: Недра, 1973 | |||
| Грейм И.А | |||
| Оптические дальномеры и высотомеры геометрического типа | |||
| - М.: Недра, 1971 | |||
| Светодальномер | |||
| Проспект фирмы Sinematogriphy Hectronics inc, USA, 1992. |
