Изобретение относится к медицине, а именно к способам и устройствам обучения ходьбе и движениям пациента с психоневрологическими нарушениями и заболеваниями опорно-двигательного аппарата.
Прежде чем переходить к описанию известных аналогов и прототипа, необходимо отметить следующее. Ухудшение нервной, мышечной и двигательной активности больных с нарушениями центральной нервной системы связаны с наличием пораженных участков головного и спинного мозга в результате травм, инсульта, заболевания детским церебральным параличом и др. У таких больных часть нейронных связей замкнута на пораженный участок, в связи с чем у больных нарушены двигательные стереотипы, снижена или отсутствует способность концентрировать сознание на выполнение определенных работ, инервация мышц осуществляется произвольным образом, в связи с чем больной может выполнять хаотичные непредсказуемые движения, как, например, при гиперкинезе, или посылкой постоянных сигналов к мышцам, что приводит к их спастичности. Связанные с этим нарушения двигательной активности увеличивают степень формирования неправильных функциональных связей. У детей после окончания периода формирования межнейронных связей мозг «закрывается» для перестройки. Тем не менее, стимуляция большой группы мышц-синергистов, заставляющая их сокращаться в естественном режиме, приводит к тому, что мозг принудительно получает полную объемную картину положения работающих мышц тела, т.к. происходит раздражение всех рецепторов тела (кожных, мышечных, температурных, зрительных, слуховых и т.д.), причем преимущественно раздражение проприоцепторов, связанных с удлинением, сокращением и ротацией мышечных волокон в их правильном естественном режиме. Интенсивная стимуляция всех рецепторов обеспечивает облегчение проведения и окклюзии нервных импульсов, соответствующих правильному движению. Кроме того, вследствие преимущественной усталости наиболее напряженных мышечных волокон в работу включаются волокна, в обычной ситуации не работающие. Импульсация от них является новой для мозга, и в результате включаются новые межнейронные связи. Далее, так как в процессе стимуляции в результате анализа и суммации вынужденно обеспечиваются прямая и обратная импульсация, соответствующая правильной работе мышц, которую обеспечить пораженный участок мозга не в состоянии, происходит компенсация здоровыми участками мозга пораженных за счет включения резервных функциональных межнейронных связей. Постепенно по мере проведения сеансов стимуляции происходит процесс выработки правильных рефлексов, и новые функциональные связи от здоровых участков мозга все более и более компенсируют пораженный участок. Таким образом, в процессе стимуляции у больного с отсутствующими двигательными стереотипами последние могут быть частично сформированы и в дальнейшем использованы мозгом для реализации двигательной задачи.
Известен способ-аналог лечения спастических форм детского церебрального паралича (ДЦП) путем фиксации конечностей в физиологическом положении, описанный в источнике: Семенова К.А. и др. Патогенетическая восстановительная терапия больных ДЦП. Киев, 1986 г., с.110-161. В известном способе фиксацию конечностей осуществляют с помощью иммобилизирующих средств, в частности путем поэтапного гипсования в течение длительного времени. Недостатком данного способа является то, что ограничение двигательной активности может привести к атрофии мышц. Кроме того, возможны патологические изменения психологии ребенка в сторону ущербности личности из-за двигательных недостатков и ограничений, т.к. лечение этим способом требует длительного времени. Основным же недостатком известного способа является то, что с его помощью восстанавливают физиологическое положение туловища и конечностей больного (или близкое к физиологическому положению), и он не пригоден для обучения ходьбе и движениям больного, у которого отсутствует стереотип движения.
В качестве прототипа заявляемого способа выбран способ лечения спастических форм детского церебрального паралича, описанный в патенте RU №2040923, МПК А61Н 3/00, опубл. 09.08.1995 г. Способ осуществляется путем фиксации конечности в физиологическом положении, причем предварительно определяют доминирующую мышечную синергию, в зависимости от этого закрепляют опорные пояса с эластичными тягами на плечевых, тазобедренных, коленных и голеностопных суставах, с помощью эластичных тяг придают туловищу и конечностям физиологическое положение, достигнутое положение оставляют на 3-8 часов, процедуры проводят ежедневно в течение двух недель, а повторный курс лечения осуществляют через 2-4 месяца.
Ортопедический аппарат, реализующий способ-прототип, содержит опорные элементы, соединенные между собой связями. При этом в аппарат введены опорные плечевые, поясничные, коленные и голеностопные пояса, продольные эластичные тяги для туловища спереди и сзади него, эластичные коррегирующие тяги для верхних и нижних конечностей, продольные эластичные тяги для стоп. Продольные эластичные тяги соединены с опорными элементами, расположенными на поясе, эластичные тяги для верхних и нижних конечностей соединяют соответствующие опорные элементы верхних и нижних конечностей, а продольные эластичные тяги для стоп соединяют опорные элементы стоп. Способу-прототипу и реализующему его ортопедическому аппарату присущи те же недостатки, что и предыдущему аналогу. Следует также отметить, что из уровня техники достаточно широко известны устройства, аналогичные ортопедическому аппарату из способа-прототипа, например «Устройство для лечения больных с нарушениями позы и двигательной активности» (патент RU №2054907, МПК A61F 5/00, опубл. 27.02.1996 г.), содержащее наплечные, локтевые, кистевые, тазовую, коленные и стопные опоры, связанные между собой фиксирующими элементами. Фиксирующие элементы выполнены в виде эластичных тяг и расположены по передней, боковой и задней поверхностям частей тела пациента. Каждая тяга связана одним концом с соответствующей опорой, а другим - через ее регулятор натяжения. Другое устройство «Комбинезон для лечения больных детским церебральным параличом и больных с последствиями черепно-мозговой травмы», описанное в патенте RU №2131232, МПК A61F 5/02, опубл. 10.06.1999 г., представляет собой костюм из взаимодополняющих элементов и содержит реклинатор для верхней части тела пользователя, представляющий собой опорно-постановочный бандаж для верхнего плечевого пояса и грудной части туловища, выполненный в виде пелота, высота которого не менее расстояния от седьмого шейного позвонка до нижнего края лопаток пользователя, а ширина - не менее расстояния между вертикальными линиями, ограничивающими медиальные части лопаток; опорно-постановочный бандаж для надплечий, выполненных в виде пелотов, имеющих форму треугольников, соответствующих антропометрическим размерам надплечий и плечевых суставов пользователя; опорно-постановочный бандаж для поясницы, выполненный в виде пояса, имеющего приспособление для взаимофиксации с другими опорно-постановочными элементами; опорно-постановочные бандажи для нижних конечностей, представляющие собой наколенники и подколенники, бандажи на передний отдел каждой стопы, бандажи на каждый голеностопный сустав и каждую пяточную область. Все части указанного устройства соединены между собой фиксирующими продольными элементами, формирующими гибкий каркас для туловища и конечностей пользователя, а также эластичными тягами, степень упругости формы которых, размер и место установки возможно изменять в соответствии с физиологическими и мышечными синергиями пользователя.
Известно также «Устройство для лечения больных с последствиями поражения центральной нервной системы и с повреждением опорно-двигательного аппарата», описанное в патенте RU №2165752, МПК А61Н 3/00, опубл. 27.04.2001 г., состоящее из отдельных модулей, выполненных с возможностью самостоятельного использования. Первый модуль представляет собой реклинатор, выполненный в виде изогнутой ленты, первые концы которой соединены между собой, а вторые концы закреплены на этой ленте с образованием двух лямок для размещения на плечах пользователя. Второй модуль представляет собой корригирующий корсет, приспособленный для коррекции позвоночника без нагрузки. Третий модуль представляет собой корригирующее приспособление для нижних конечностей, содержащее, по меньшей мере, одну первую часть, представляющую собой комплексный бандаж бедра и голени, имеющий две гибкие полосы для фиксации соответственно над коленным суставом и под ним, по меньшей мере, одну вторую часть, представляющую собой корригирующее приспособление для голеностопного сустава и пальцев ноги, имеющее первую и вторую гибкие полосы для размещения соответственно на лодыжке и стопе, и, по меньшей мере, одну третью часть, представляющую собой единый мысково-подошвенный элемент. При этом устройство может иметь четвертый модуль, содержащий одну первую часть, представляющую собой комплексный бандаж плеча и предплечья, имеющий две гибкие полосы для фиксации соответственно над и под локтевым суставом, и одну вторую часть, представляющую собой единый корригирующий элемент для ладони и большого пальца руки.
Недостатком известных устройств, как уже было сказано ранее, является то, что они позволяют восстановить нарушенные вследствие заболеваний или повреждений движения пациента, однако для пациентов с отсутствующим стереотипом движения их применение не эффективно либо не пригодно.
Задачей, решаемой изобретением, является формирование у пациента отсутствующего стереотипа движения и обучение ходьбе и движениям.
Достигается это тем, что в известном способе лечения спастических форм детского церебрального паралича путем фиксации туловища и верхних и нижних конечностей в физиологическом положении посредством функционального скелета согласно изобретению:
- предварительно определяют в соответствии с патологией пациента допустимые величины угловых отклонений суставов верхних и нижних конечностей;
- фиксируют пациента посредством функционально скелета и устанавливают его в вертикальное положение с отрывом ступней от опорной поверхности;
- посредством функционального скелета с учетом предварительно определенных угловых отклонений суставов циклично приводят в движение верхние и нижние конечности в направлении вперед-назад с изгибанием тазобедренных, коленных, голеностопных, плечевых, локтевых и лучезапястных суставов;
- одновременно контролируют усилия, развиваемые основными группами мышц, участвующих в движении, и предоставляют пациенту видео- и аудиоинформацию о его перемещении в виртуальном пространстве;
- в моменты мнимого наступания пяток и носков ступней на опорную поверхность их возбуждают кратковременным вибрационным воздействием заданной длительности, частоты и амплитуды;
- длительность сеанса обучения составляет 25-45 минут, сеансы проводят ежедневно в течение 7-15 дней, а повторный курс обучения при необходимости осуществляют через 1-2 месяца.
В устройстве, предназначенном для осуществления способа обучения ходьбе и движениям пациента с психоневрологическими нарушениями и заболеваниями опорно-двигательного аппарата, содержащем функциональный скелет, выполненный из жестких элементов трубчатой конструкции с возможностью регулирования длины каждого жесткого элемента, при этом в верхней части элемента, расположенного вертикально напротив позвоночника пациента со стороны спины, жестко закреплен первый поперечный элемент, концы которого располагаются напротив плечевых суставов пациента со стороны спины, а в нижней его части жестко закреплен второй поперечный элемент, концы которого располагаются напротив тазобедренных суставов пациента со стороны спины, к концам первого поперечного элемента шарнирно крепятся элементы, располагающиеся с тыльных сторон плеча, предплечья и кисти, соединенные между собой шарнирно в местах расположения локтевых и лучезапястных суставов пациента, к концам второго поперечного элемента шарнирно крепятся элементы, располагающиеся с тыльных сторон бедра, голени и под стопой пациента, соединенные между собой шарнирно в местах расположения коленных и голеностопных суставов пациента, жесткие элементы функционального скелета оснащены устройствами для фиксации туловища и верхних и нижних конечностей пациента на функциональном скелете, выполненными в виде эластичных тяг с регулируемым натяжением, крепящихся к жестким элементам, согласно изобретению:
- в каждом из шарнирных соединений функционального скелета установлен электродвигатель, кинематически связанный с шарниром и ниже расположенным жестким элементом, осуществляющий отклонение жесткого элемента по заданной программе;
- перед лицом пациента установлена панель воспроизведения видео- и аудиоинформации, отображающая перемещение пациента в виртуальном пространстве синхронно с отклонениями жестких элементов функционального скелета, имитирующих верхние и нижние конечности;
- под носками и пятками ступней пациента установлены вибраторы;
- жесткий вертикальный элемент функционального скелета, расположенный напротив позвоночника пациента, в средней своей части выполнен с шарнирным соединением и кинематически связанным с ним электродвигателем, обеспечивающим поворот влево-вправо туловища пациента на заданный угол;
- электродвигатели функционального скелета, панель воспроизведения видео- и аудиоинформации и вибраторы электрически связаны с блоком управления;
- на жестком вертикальном элементе функционального скелета, расположенным напротив позвоночника пациента, жестко закреплены жесткие тяги для подъема функционального скелета над опорной поверхностью.
Кроме того, на поверхностях жестких элементов функционального скелета, обращенных к позвоночнику и конечностям пациента, установлены мягкие подложки из теплоизолирующего материала.
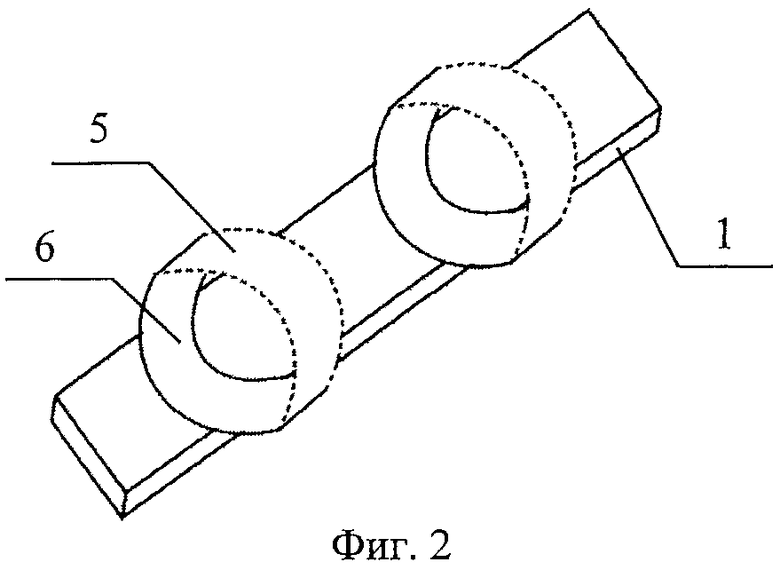
Кроме того, жесткие элементы функционального скелета, имитирующие верхние и нижние конечности, оснащены устройствами для крепления эластичных тяг, представляющими собой жесткие полукольца, обращенные вогнутой поверхностью к конечностям пациента и крепящиеся к жестким элементам функционального скелета.
Кроме того, функциональный скелет оснащен датчиками контроля усилия мышц, находящихся в спастическом состоянии и электрически связанными с блоком управления.
Кроме того, функциональный скелет оснащен сенсорными датчиками, устанавливаемыми на основные группы мышц конечностей, участвующих в движении при ходьбе, электрически связанными с блоком управления.
Кроме того, панель воспроизведения оснащена видеокамерой, установленной напротив глаз пациента, электрически соединенной с блоком управления.
Кроме того, функциональный скелет оснащен датчиком контроля пульса пациента, электрически соединенным с блоком управления
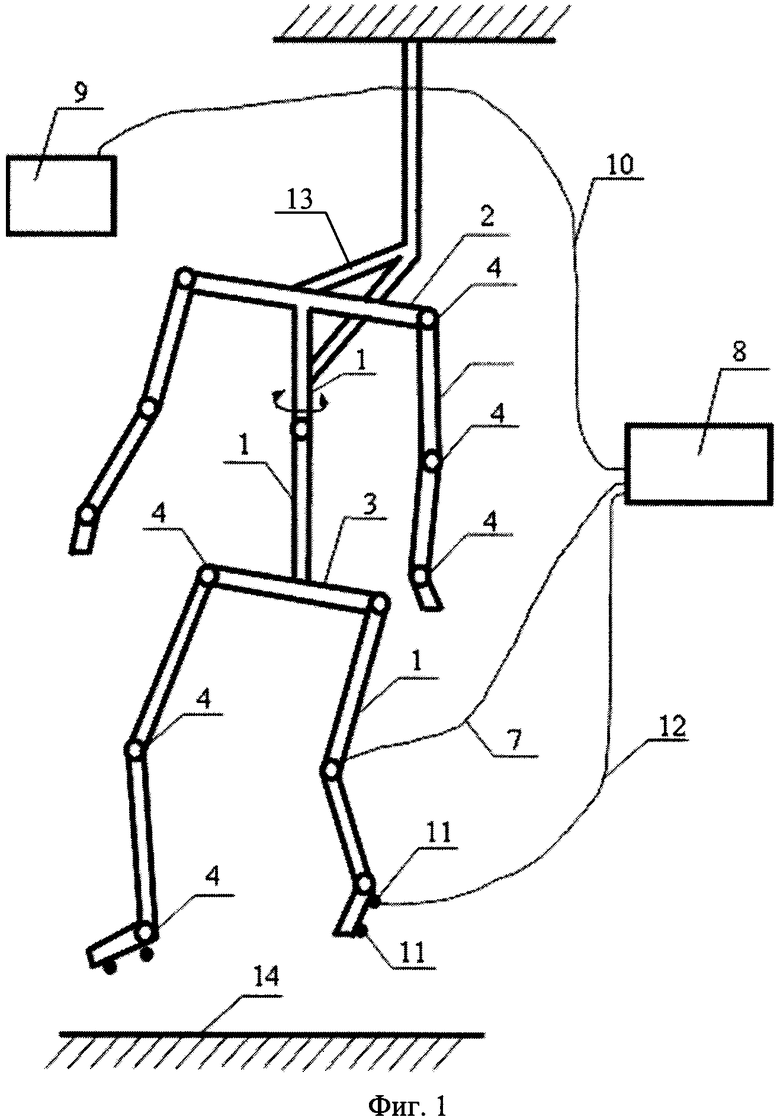
Изобретение поясняется чертежом, на котором схематично изображено устройство, предназначенное для обучения ходьбе и движениям пациентов, у которых отсутствует стереотип движения, при этом на фиг.1 изображен функциональный скелет, а на фиг.2 - один из жестких элементов с устройствами для закрепления эластичных тяг.
Устройство содержит функциональный скелет, выполненный из соединенных между собой жестких элементов 1 трубчатой конструкции, например отрезков металлических труб прямоугольного сечения, с возможностью регулирования длины каждого жесткого элемента, которая может быть осуществлена при телескопической конструкции каждого жесткого элемента с фиксацией в нескольких положениях (на фиг.1 не показано). В верхней части вертикально расположенного жесткого элемента 1, находящегося напротив позвоночника пациента, жестко закреплен первый поперечный элемент 2, концы которого располагаются напротив плечевых суставов пациента со стороны спины, а в нижней его части жестко закреплен второй поперечный элемент 3, концы которого располагаются напротив тазобедренных суставов пациента со стороны спины. Поперечные элементы 2 и 3 могут иметь некоторую кривизну для более полного контакта с туловищем пациента. К концам первого поперечного элемента 2 шарнирно крепятся элементы 1, располагающиеся с тыльных сторон плеча, предплечья и кисти, соединенные между собой шарнирно в местах расположения локтевых и лучезапястных суставов пациента. Шарниры 4 на фиг.1 условно показаны кружочками. К концам второго поперечного элемента 3 шарнирно крепятся элементы 1, располагающиеся с тыльных сторон бедра, голени и под стопой пациента, соединенные между собой шарнирно (шарниры 4 на фиг.1) в местах расположения коленных и голеностопных суставов пациента. Жесткие элементы 1 функционального скелета оснащены устройствами для фиксации туловища и верхних и нижних конечностей пациента на функциональном скелете, выполненными в виде эластичных тяг 5 с регулируемым натяжением, например эластичных бинтов с пряжками либо «липучками», крепящихся к жестким элементам 1 с помощью устройств, выполненных, например в виде жестких полуколец 6, обращенных вогнутой поверхностью к конечностям пациента, и крепящиеся к жестким элементам 1 (см. фиг.2, на которой приведен один жесткий элемент 1 с расположенными на нем полукольцами 6 и эластичными тягами 5). Эластичная тяга 5 может крепиться к полукольцу 6 с помощью «липучей» застежки, пуговиц, пряжки и т.д. В каждом из шарнирных соединений функционального скелета установлен электродвигатель (на фиг.1 не показаны), кинематически связанный с шарниром и нижерасположенным жестким элементом, осуществляющий отклонение нижерасположенного элемента по заданной программе. Кинематическая связь электродвигателя с шарниром и жестким элементом может быть осуществлена, например, посредством шестеренчатого соединения. Каждый электродвигатель электрически связан, например, кабелем 7 с блоком управления 8 (на фиг.1 для простоты восприятия показан только один кабель 7, связывающий коленный шарнир с блоком управления 8). Каждый отдельный электродвигатель осуществляет отклонение только одного жесткого элемента 1 функционального скелета по заданной программе. Перед лицом пациента установлена панель воспроизведения 9 видео- и аудиоинформации, отображающая перемещение пациента в виртуальном пространстве синхронно с отклонениями жестких элементов 1, имитирующих верхние и нижние конечности пациента. Конструктивно панель воспроизведения 9 может быть выполнена в виде экрана либо в виде шлема, надеваемого на голову пациента, с размещенным перед его глазами экраном, закрепленном на шлеме, и наушниками либо громкоговорителем. На экране отображается видеоинформация, соответствующая перемещению пациента в виртуальном пространстве при его мнимой ходьбе, например по квартире, улице и т.д., а в качестве аудиоинформации может быть представлен шелест травы, хруст снега при ходьбе, разговор близких пациенту людей, шум улицы и т.д. Дополнительно на панели 9 может быть установлена камера (на фиг.1 не показана), расположенная напротив глаз пациента и предназначенная для контроля реакции пациента (по расширению зрачков) на видео- и аудиоинформацию. Панель 9 электрически связана кабелем 10 с блоком управления 8. Под носками и пятками пациента установлены вибраторы 11, предназначенные для создания кратковременного вибрационного воздействия при мнимом наступании пяток и носков на опорную поверхность, электрически связанные кабелем 12 с блоком управления 8. Жесткий вертикальный элемент 1, расположенный напротив позвоночника пациента, выполнен с шарнирным соединением и кинематически связанным с ним электродвигателем, обеспечивающим поворот влево-вправо туловища пациента на заданный угол (повороты вертикального элемента 1 на фиг.1 показаны круговой стрелкой). На жестком вертикальном элементе 1 функционального скелета, расположенном напротив позвоночника пациента, жестко закреплены жесткие тяги 13, обеспечивающие подъем функционального скелета над опорной поверхностью 14 (механизм для обеспечения подъема на фиг.1 не показан). Дополнительно на поверхностях жестких элементов функционального скелета, обращенных к позвоночнику и конечностям пациента, могут быть установлены мягкие подложки из теплоизолирующего материала, например пористого пенополиэтилена, обшитого плотной тканью (на фиг.1 не показаны). Кроме этого, физиологический скелет может быть оснащен датчиками контроля усилия мышц, устанавливаемыми на группы мышц, находящихся в спастическом состоянии, электрически связанными с блоком управления 8. Эти датчики предотвращают травмирование мышц пациента при повышенной нагрузке на мышцы в результате имитации ходьбы пациента (датчики усилия на фиг.1 не показаны). Дополнительно функциональный скелет может быть оснащен сенсорными датчиками, устанавливаемыми на основные группы мышц, участвующих в акте ходьбы, которые передают информацию с мышц пациента в блок управления 8, который, обработав полученную информацию, приводит в движение функциональный скелет и подает соответствующую видео- и аудиоинформацию на панель воспроизведения. Дополнительно панель воспроизведения оснащена видеокамерой (на фиг.1 не показана), установленной напротив глаз пациента, электрически соединенной с блоком управления. А также функциональный скелет может быть оснащен датчиком контроля пульса пациента (на фиг.1 не показан), электрически соединенным с блоком управления. Блок управления 8 представляет собой компьютер с соответствующим программным обеспечением и систему сбора данных с датчиков функционального скелета.
Рассмотрим последовательность выполнения действий заявляемого способа обучения ходьбе и движениям пациента с психоневрологическими нарушениями и заболеваниями опорно-двигательного аппарата.
Предварительно определяют в соответствии с патологией пациента допустимые величины угловых отклонений суставов верхних и нижних конечностей (индивидуально для каждого сустава). Это необходимо для того, чтобы избежать возможного причинения боли пациенту и патологических изменений его психологии во время сеанса обучения с помощью устройства, реализующего заявляемый способ.
Затем пациента фиксируют посредством функционального скелета в физиологическом положении (или близким к нему) и устанавливают в вертикальное положение с отрывом ступней от опорной поверхности (пола), т.е. пациента, зафиксированного в функциональном скелете, приподнимают на некоторую высоту над опорной поверхностью, например на 0,2-0,3 м.
После этого посредством функционального скелета с учетом предварительно определенных угловых отклонений суставов циклично приводят в движение верхние и нижние конечности в направлении вперед - назад с изгибанием тазобедренных, коленных, голеностопных, плечевых, локтевых и лучезапястных суставов с одновременным контролем усилий, развиваемых основными группами мышц, участвующих в движении, и предоставлением пациенту видео- и аудиоинформации о его перемещении в виртуальном пространстве. Это действие способа позволяет пациенту с отсутствующим у него стереотипом движения познать явления, присущие ходьбе (перемещение ног, сгибание суставов конечностей, напряжение и расслабление мышц конечностей), а также зрительное и слуховое восприятие процесса ходьбы (движущиеся навстречу идущему окружающие предметы, стук каблуков, шуршание опавших листьев и т.д.), а контроль усилий мышц позволяет избежать излишней нагрузки на мышцы и болевых ощущений.
Кроме этого, в моменты мнимого наступания пяток и носков ступней пациента на опорную поверхность (поскольку имитация ходьбы пациента происходит без контакта с опорной поверхностью) их возбуждают кратковременным (100-200 мс) вибрационным воздействием заданной длительности, частоты и амплитуды, имитируя тем самым наступание ступней на опорную поверхность.
Длительность сеанса обучения ходьбе подбирают индивидуально для каждого пациента в зависимости от его состояния и диагноза, и она может составлять 25-45 минут, сеансы проводят ежедневно в течение 7-15 дней адекватно тому, как пациент адаптируется к нагрузке. Повторный курс обучения при необходимости проводят через 1-2 месяца. Могут быть применены два типа нагрузки пациента - временная и силовая. При временной нагрузке увеличивают длительность сеанса, но при этом уменьшают углы сгибания в суставах и темп движения, а при силовой нагрузке уменьшают длительность сеанса, но увеличивают углы сгибания суставов, повышают темп.
Таким образом, применение заявляемого способа позволяет постепенно сформировать у пациента отсутствующий ранее стереотип движения, освоить основные навыки ходьбы и движений и связанные с ним зрительные и слуховые ощущения.
Рассмотрим теперь работу устройства, реализующего заявляемый способ. Предварительно в соответствии с патологией пациента определяют допустимые величины угловых отклонений суставов верхних и нижних конечностей и задают эти значения в блок управления 8. После этого фиксируют пациента на функциональном скелете посредством закрепления эластичных тяг 5 на полукольцах 6 (нижние и верхние конечности фиксируют, по меньшей мере, двумя тягами 5 на каждом жестком элементе 1). Например, голень фиксируют вблизи коленного и голеностопного суставов, плечо - вблизи плечевого и локтевого суставов, предплечье - вблизи локтевого и лучезапястного суставов. Туловище пациента фиксируют с помощью эластичных тяг, крепящихся к первому поперечному элементу 2, вертикальному жесткому элементу 1, расположенному напротив позвоночника пациента, и второму поперечному элементу 3. На перечисленных элементах имеются устройства для крепления на них эластичных тяг (пряжки, «липучки» и т.д., на фиг.1 не показаны). После фиксации пациента в физиологическом положении (или близком к нему) функциональному скелету придают вертикальное положение и с помощью тяг 13 приподнимают его на некоторую высоту над опорной поверхностью 14, чтобы стопы пациента находились в воздухе. При необходимости на отдельные группы мышц (преимущественно на спастические мышцы) устанавливают датчики контроля усилия, а для контроля динамики занятий на основные мышцы, участвующие в акте ходьбы, устанавливаются сенсорные датчики, передающие информацию с мышц на управляющий блок. После этого включают блок управления 8, который с учетом определенных ранее допустимых угловых отклонений каждого из суставов приводит посредством кабеля 7 и электродвигателей, расположенных вблизи шарнирных соединений элементов 1 функционального скелета, в циклическое движение элементов 1 вперед - назад с изгибанием суставов верхних и нижних конечностей пациента (каждый сустав изгибается в пределах допустимых для него значений углов). Синхронно с началом движения функционального скелета с блока управления 8 по кабелю на 10 панель воспроизведения 9 подается видео- и аудиоинформация о виртуальном перемещении пациента в пространстве с соответствующими ему зрительными и слуховыми ощущениями, а с помощью видеокамеры и датчика контроля пульса отслуживают реакцию пациента (по расширению зрачков) на подаваемую видео- и аудиоинформацию. Вибраторы 11, установленные под носками и пятками ступней, посредством сигнала с управляющего блока 8 и кабеля 12 создают кратковременные вибрационные воздействия заданной длительности, амплитуды и частоты в моменты мнимого наступания пяток и носков пациента на опорную поверхность 14, что создает у пациента ощущение реальной ходьбы. Дополнительно с помощью шарнира и кинематически связанного с ним электродвигателя, расположенных в средней части вертикального жесткого элемента функционального скелета, может осуществляться поворот туловища пациента влево-вправо на заданный угол.
Отметим, что темп ходьбы, величина углов отклонения суставов, а соответственно и нагрузки на мышцы пациента, могут изменяться в широких пределах путем задания соответствующей программы для блока управления 8.
Заявляемое техническое решение может быть также использовано для снятия спастики отдельных групп мышц и устранения контрактур суставов, что говорит о его более широких функциональных возможностях по сравнению с известными техническими решениями. В настоящее время разрабатывается техническое задание на разработку устройства и формируется план исследовательских работ. Устройство может быть изготовлено с использованием известных материалов и оборудования с применением современной вычислительной техники.
Учитывая изложенное, а также новизну предлагаемого технического решения, наличие существенных отличительных признаков и промышленную применимость, заявитель считает, что оно может быть защищено патентом на изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2006 |
|
RU2309709C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| СПОСОБ НЕЙРОДИНАМИЧЕСКОЙ (НЕЙРОСЕНСОРНОЙ) КОРРЕКЦИИ ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНЫХ, ПОЗНЫХ, СЕНСОРНЫХ И КОГНИТИВНЫХ ФУНКЦИЙ У БОЛЬНЫХ С ПАТОЛОГИЕЙ НЕРВНОЙ СИСТЕМЫ И ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И КОСТЮМ ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2013 |
|
RU2573535C2 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2017 |
|
RU2659132C1 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ БОЛЬНЫХ С НАРУШЕНИЕМ ПОЗЫ И ДВИГАТЕЛЬНОЙ АКТИВНОСТИ | 1992 |
|
RU2054907C1 |
| СПОСОБ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ ПРОЯВЛЕНИЙ ПОЯСНИЧНОГО ОСТЕОХОНДРОЗА "ДЕЛЬТА АЛЬТЕРНАТИВА АНДРЕЯ НЕКРАСОВА" | 2006 |
|
RU2289382C1 |
| Способ реабилитации пациентов после эндопротезирования тазобедренного сустава | 2019 |
|
RU2725245C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У ИНВАЛИДОВ С ПОРАЖЕНИЕМ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2006 |
|
RU2305534C1 |
| КОМПЛЕКС ТРЕНАЖЕРНЫЙ ДЛЯ ДВИГАТЕЛЬНОЙ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С ОСЛОЖНЕННОЙ ТРАВМОЙ ПОЗВОНОЧНИКА | 2009 |
|
RU2396934C1 |
| УСТРОЙСТВО РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С НАРУШЕНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2765403C1 |
Изобретение относится к медицине, а именно к способам и устройствам обучения ходьбе и движениям пациентов с психоневрологическими нарушениями и заболеваниями опорно-двигательного аппарата. Технический результат, заключающийся в формировании стереотипа движения у пациента, достигается благодаря тому, что пациента фиксируют в функциональном скелете. Приподнимают над опорной поверхностью и циклично приводят в движение суставы верхних и нижних конечностей посредством функционального скелета. При этом пациенту представляют видео- и аудиоинформацию о его виртуальном движении, а на ступни подают вибрационное воздействие в моменты их мнимого касания опорной поверхности. Устройство для осуществления способа содержит функциональный скелет с шарнирно сочлененными имитаторами верхних и нижних конечностей с установленными в них электродвигателями, панель воспроизведения видео- и аудиоинформации и блок управления. 2 н. и 6 з.п. ф-лы, 2 ил.
1. Способ обучения ходьбе и движениям пациента с психоневрологическими нарушениями и заболеваниями опорно-двигательного аппарата путем фиксации туловища и верхних и нижних конечностей в физиологическом положении посредством функционального скелета, отличающийся тем, что предварительно определяют в соответствии с патологией пациента допустимые величины угловых отклонений суставов верхних и нижних конечностей, после чего фиксируют пациента и устанавливают его в вертикальное положение с отрывом ступней от опорной поверхности, а затем посредством функционального скелета с учетом предварительно определенных угловых отклонений суставов циклично приводят в движение верхние и нижние конечности в направлении вперед - назад с изгибанием тазобедренных, коленных, голеностопных, плечевых, локтевых и лучезапястных суставов с одновременным контролем усилий, развиваемых основными группами мышц, участвующих в движении, и предоставлением пациенту видео- и аудиоинформации о его перемещении в виртуальном пространстве, при этом в моменты мнимого наступания пяток и носков ступней на опорную поверхность их возбуждают кратковременным вибрационным воздействием заданной длительности, частоты и амплитуды, длительность сеанса составляет 25-45 мин, сеансы проводят ежедневно в течение 7-15 дней, а повторный курс обучения при необходимости осуществляют через 1-2 месяца.
2. Устройство для обучения ходьбе и движениям пациента с психоневрологическими нарушениями и заболеваниями опорно-двигательного аппарата, содержащее функциональный скелет, выполненный из соединенных между собой жестких элементов трубчатой конструкции с возможностью регулирования длины каждого жесткого элемента, при этом в верхней части элемента, расположенного вертикально напротив позвоночника пациента со стороны спины, жестко закреплен первый поперечный элемент, концы которого располагаются напротив плечевых суставов пациента со стороны спины, а в нижней его части жестко закреплен второй поперечный элемент, концы которого располагаются напротив тазобедренных суставов пациента со стороны спины, к концам первого поперечного элемента шарнирно крепятся элементы, располагающиеся с тыльных сторон плеча, предплечья и кисти, соединенные между собой шарнирно в местах расположения локтевых и лучезапястных суставов пациента, к концам второго поперечного элемента шарнирно крепятся элементы, располагающиеся с тыльных сторон бедра, голени и под стопой пациента, соединенные между собой шарнирно в местах расположения коленных и голеностопных суставов пациента, жесткие элементы функционального скелета оснащены устройствами для фиксации туловища и верхних и нижних конечностей пациента на функциональном скелете, выполненными в виде эластичных тяг с регулируемым натяжением, крепящихся к жестким элементам, отличающееся тем, что в каждом из шарнирных соединений функционального скелета установлен электродвигатель, кинематически связанный с шарниром и ниже расположенным жестким элементом, осуществляющий отклонение жесткого элемента по заданной программе, перед лицом пациента установлена панель воспроизведения видео- и аудиоинформации, отображающая перемещение пациента в виртуальном пространстве синхронно с отклонениями жестких элементов функционального скелета, имитирующих верхние и нижние конечности, под носками и пятками ступней пациента установлены вибраторы, жесткий вертикальный элемент функционального скелета, расположенный напротив позвоночника пациента, в средней своей части выполнен с шарнирным соединением и кинематически связанным с ним электродвигателем, обеспечивающим поворот влево-вправо туловища пациента на заданный угол, электродвигатели функционального скелета, панель воспроизведения видео- и аудиоинформации и вибраторы электрически связаны с блоком управления, а на первом поперечном жестком элементе функционального скелета жестко закреплены жесткие тяги для подъема функционального скелета над опорной поверхностью.
3. Устройство по п.2, отличающееся тем, что на поверхностях жестких элементов функционального скелета, обращенных к позвоночнику и конечностям пациента, установлены мягкие подложки из теплоизолирующего материала.
4. Устройство по п.2, отличающееся тем, что жесткие элементы функционального скелета, имитирующие верхние и нижние конечности, оснащены устройствами для крепления тяг, представляющими собой жесткие полукольца, обращенные вогнутой поверхностью к конечностям пациента и крепящиеся к жестким элементам функционального скелета.
5. Устройство по п.2, отличающееся тем, что функциональный скелет оснащен датчиками контроля усилия мышц, находящихся в спастическом состоянии и электрически связанных с блоком управления.
6. Устройство по п.2, отличающееся тем, что функциональный скелет оснащен сенсорными датчиками, устанавливаемыми на основные группы мышц конечностей, участвующих в движении при ходьбе, электрически связанными с блоком управления.
7. Устройство по п.2, отличающееся тем, что панель воспроизведения оснащена видеокамерой, установленной напротив глаз пациента, электрически соединенной с блоком управления.
8. Устройство по п.2, отличающееся тем, что функциональный скелет оснащен датчиком контроля пульса пациента, электрически соединенным с блоком управления.
| СПОСОБ ЛЕЧЕНИЯ СПАСТИЧЕСКИХ ФОРМ ДЕТСКОГО ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА И ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1992 |
|
RU2040923C1 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ БОЛЬНЫХ С ПОСЛЕДСТВИЯМИ ПОРАЖЕНИЯ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ И С ПОВРЕЖДЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2165752C1 |
| Рогульчатое веретено | 1950 |
|
SU93965A1 |
| Дистанционный датчик давления | 1956 |
|
SU106531A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| RU 2008139772 A, 20.04.2010. | |||

