Изобретение относится к радиолокационной технике и может быть использовано в когерентно-импульсной РЛС или РЛС непрерывного излучения для получения двумерного радиолокационного изображения (РЛИ) и распознавания по нему воздушной цели.
Известен способ построения РЛИ [1] принятый за прототип, за счет обработки сигналов доплеровских частот, а также устройство для его реализации, которые могут быть применены в РЛС, осуществляющей сопровождение воздушной цели, совершающей при прямолинейном полете угловые перемещения вокруг взаимно-ортогональных осей ввиду специфики аэродинамических свойств летательных аппаратов. Находясь на одной из осей вращения, локальный рассеиватель участвует во вращательном движении только относительно другой оси. Полученные РЛИ возможно, если могут быть определены два или несколько таких рассеивателей, лежащих на одной оси вращения. Данные рассеиватели будут иметь аналогичные, с точностью до некоторого коэффициента, законы изменения доплеровских частот. На основе этого вычисляются средние значения угловых скоростей и значения корреляционных функций, связанных с ними. Величины корреляционных функций рассеивателей, вращающихся (качающихся) относительно взаимно-ортогональных осей, позволяют определить положения данных рассеивателей в двумерной системе координат. Для определения корреляционных зависимостей между рассеивателями в данном способе предложено сопровождать цель десятки.сотни секунд и проводить при этом анализ доплеровских частот, разрешая отдельные рассеиватели.
Данный способ требует сопровождения объекта в течение недопустимо длительного времени (порядка 60.100 с), а также наличия в сопровождаемом объекте большого числа (более 10) рассеивателей. Это вызвано необходимостью детального сравнения доплеровских частот рассеивателей в течение времени сопровождения для нахождения такой пары рассеивателей, у которой доплеровские частоты на всем протяжении равны по модулю или отличаются с точностью до постоянного коэффициента. При этом известно, что РЛС сантиметрового диапазона при инверсном синтезировании апертуры [2] может обеспечить высокое разрешение в поперечном направлении [3] равное единицам метров, различая на поверхности цели до 10 рассеивателей при накоплении отраженного сигнала в течение единиц секунд, что соответствует временным нормативам, отводимым на распознавание целей в современных радиолокационных системах.
Известен также способ построения двумерного радиолокационного изображения цели в РЛС сопровождения с инверсным синтезированием апертуры и суммарно-разностной обработкой сигнала, основанный на доплеровском частотном анализе [4] сущность которого состоит в том, что при сопровождении прямолинейно движущегося объекта для двух равных, но смещенных на 1-2 с интервалов инверсного синтезирования апертуры, получают доплеровские спектры цели, которые по времени соответствуют серединам этих интервалов накопления  производится вычисление доплеровской частоты центра сопровождения цели G(ω) в данные моменты времени, рассчитывается угловая скорость поворота цели γ′ определяются характер и величины изменений доплеровских частот локальных рассеивателей относительно G(ω) и квадранты плоскости изображения, соответствующие определенным рассеивателям, рассчитываются значения расстояний ρi от центра сопровождения цели до i-х рассеивателей и углов ξi между линейными скоростями их вращения вокруг центра сопровождения Vi и их радиальными составляющими Vri по приведенным формулам, рассчитываются эффективные площади рассеяния (ЭПР) локальных рассеивателей σi исходя из амплитуд их доплеровских гармоник в спектре, и в двумерной системе координат "азимут-дальность" формируют совокупность точек по числу локальных рассеивателей с использованием следующего правила:
производится вычисление доплеровской частоты центра сопровождения цели G(ω) в данные моменты времени, рассчитывается угловая скорость поворота цели γ′ определяются характер и величины изменений доплеровских частот локальных рассеивателей относительно G(ω) и квадранты плоскости изображения, соответствующие определенным рассеивателям, рассчитываются значения расстояний ρi от центра сопровождения цели до i-х рассеивателей и углов ξi между линейными скоростями их вращения вокруг центра сопровождения Vi и их радиальными составляющими Vri по приведенным формулам, рассчитываются эффективные площади рассеяния (ЭПР) локальных рассеивателей σi исходя из амплитуд их доплеровских гармоник в спектре, и в двумерной системе координат "азимут-дальность" формируют совокупность точек по числу локальных рассеивателей с использованием следующего правила:
при отнесении i-го рассеивателя в соответствующий квадрант в данном квадранте определяется точка, лежащая на дуге окружности радиуса ρi, касательная в которой к этой дуг составляет с радиальным направлением для 1 и 4 квадрантов и с ему противоположным для 2 и 3 квадрантов угол ξi, а вокруг этой точки проводится окружность, радиус которой пропорционален ЭПР i-го рассеивателя.
Недостатком данного способа является необходимость расчета меняющейся доплеровской частоты центра сопровождения цели для середины двух интервалов синтезирования, что невозможно выполнить с достаточной точностью, и ввиду этого могут иметь место ошибки построения радиолокационного изображения, которые будут еще больше из-за наличия в расчетных формулах множества тригонометрических функций малого аргумента (изменения ракурса сопровождения цели за интервал времени  составляющий 1.2 с). К тому же данный способ может быть применен лишь в РЛС с суммарно-разностной обработкой, что накладывает дополнительные ограничения на его реализацию. И наконец, вывод формул для расчета координат рассеивателей ρi и ξi проведен в данном способе в предположении постоянства угловой скорости изменения ракурса локации γ′ что на самом деле не так, и в связи с этим существуют дополнительные ошибки построения РЛИ цели.
составляющий 1.2 с). К тому же данный способ может быть применен лишь в РЛС с суммарно-разностной обработкой, что накладывает дополнительные ограничения на его реализацию. И наконец, вывод формул для расчета координат рассеивателей ρi и ξi проведен в данном способе в предположении постоянства угловой скорости изменения ракурса локации γ′ что на самом деле не так, и в связи с этим существуют дополнительные ошибки построения РЛИ цели.
Целью изобретения является повышение точности построения двумерного радиолокационного изображения цели, чем достигается повышение достоверности ее распознавания.
Это обеспечивается тем, что в РЛС с узкополосным когерентным зондирующим сигналом применяется метод инверсного радиолокационного синтезирования апертуры [2, 3] и в оперативном запоминающем устройстве формируются низкочастотные (0.100 Гц) доплеровские портреты цели, полученные для двух различных ракурсов сопровождения, угловой интервал между которыми составляет 0,5o. При этом в 96% случаев вторичные доплеровские составляющие портрета лишь смещаются по оси частот, но не меняются местами, если траектория движения цели прямолинейна и отсутствуют нестабильности полета в виде рысканий, тангажей и т.д. Для обеспечения изменения ракурса на 0,5o требуется интервал времени Δt который может быть рассчитан по формуле
где r наклонная дальность до цели, V скорость полета цели, γ угол между вектором скорости цели и линией визирования цели (ракурс цели).
Затем производится сравнительный анализ структуры полученных доплеровских портретов, в которых каждому рассеивателю поверхности цели соответствует определенная гармоника. Восстановление двумерного РЛИ цели по ее одномерным доплеровским портретам возможно ввиду того, что центральные частоты гармоник рассеивателей характеризуют с точностью до некоторого масштабного коэффициента расстояние от соответствующего рассеивателя до плоскости, образованной осью вращения цели и линией визирования [3, с.29] Таким образом, доплеровский портрет цели характеризует распределение рассеивателей вдоль линии, перпендикулярной указанной плоскости. Существует аналогия вращательного движения цели с ситуацией, когда система рассеивателей перемещается относительно РЛС с линейной скоростью V под некоторым углом g Разница заключена лишь в том, что вращение цели будет определяться законом изменения во времени угла g а полученное при этом спектральное распределение гармоник рассеивателей будет сдвинуто вдоль частотной оси на величину 2Vcosg/λ где l длина волны.
За доплеровскую частоту (центральную частоту вторичной доплеровской составляющей в портрете) i-го рассеивателя в момент времени t принимается значение Fdi(t), соответствующее точке максимума i-й составляющей портрета. Анализ структуры доплеровских портретов начинается с того, что составляющие портретов нумеруются и цифровым способом определяются их центральные частоты, т.е. доплеровские частоты рассеивателей в два последовательные момента времени  в промежутке между которыми ракурс цели изменился на 0,5o. Одновременно с этим определяется эффективная площадь рассеяния каждого i-го рассеивателя σi на основе того, что интенсивность i-й гармоники портрета Ai пропорциональна величине
в промежутке между которыми ракурс цели изменился на 0,5o. Одновременно с этим определяется эффективная площадь рассеяния каждого i-го рассеивателя σi на основе того, что интенсивность i-й гармоники портрета Ai пропорциональна величине  [4] с учетом некоторого коэффициента пропорциональности, зависящего от усилительных свойств приемника РЛС.
[4] с учетом некоторого коэффициента пропорциональности, зависящего от усилительных свойств приемника РЛС.
Вторичные доплеровские частоты Fdi пересчитываются в линейные удаления рассеивателей от линии визирования цели. Порядок пересчета опирается на то, что вторичная доплеровская частота i-го рассеивателя определяется выражением Fdi 2Vri/λ, где Vri радиальная составляющая линейной скорости поворота i-го рассеивателя вокруг центра сопровождения цели за счет изменения ракурса локации. Угловая скорость поворота цели g′ рассчитывается по формуле γ′ = vsinγ/r Линейная скорость поворота цели Vлин.i определяется в виде Vлин.i ρiγ′ где ρi расстояние от центра сопровождения до i-го рассеивателя. Соответственно и поперечное удаление i-го рассеивателя от линии визирования определяется ρ┴i = vri/γ′, что с учетом вышеприведенных выражений дает формулу для пересчета доплеровских частот в линейные удаления от линии визирования
ρ┴i(t) = Fдi(t)λr/(2vsinγ).
Этих данных достаточно для построения двумерного РЛИ цели в координатах "азимут-дальность". Для этого используется система координат, связанная с центром сопровождения цели, как с началом отсчета, ось ординат которой сонаправлена с радиальным направлением (см. чертеж), а ось абсцисс, выражающая поперечное направление, проходит перпендикулярно плоскости, образованной линией визирования и осью относительного вращения цели при сопровождении.
Для построения РЛИ i-го рассеивателя в системе координат ZOF (см. чертеж) необходимо знание двух координат. В роли первой из них выступает азимут (поперечная дальность) ρ┴i Для пояснения правила расчета второй (радиальной) координаты zi рассмотрим поворот рассеивателя A в системе ZOF при изменении ракурса локации γ. Во время первого синтезирования, в момент времени  , соответствующий его середине рассеиватель на чертеже занимает положение, показанное точкой A. При повторном синтезировании, в момент его середины
, соответствующий его середине рассеиватель на чертеже занимает положение, показанное точкой A. При повторном синтезировании, в момент его середины  рассеиватель находится в точке A'. Изменение ракурса локации составляет Δγ При таком рассмотрении центральная доплеровская частота рассеивателя в момент времени
рассеиватель находится в точке A'. Изменение ракурса локации составляет Δγ При таком рассмотрении центральная доплеровская частота рассеивателя в момент времени  будет соответствовать точке D на оси частот OZ, а в момент времени
будет соответствовать точке D на оси частот OZ, а в момент времени  точке E. Из геометрических соображений ясно, что результат нахождения доплеровской частоты рассеивателя во второй момент времени не изменится, если повороту на угол Δγ (в сторону, противоположную повороту рассеивателя) подвергнуть систему координат ZOF, а рассеиватель оставить неподвижным (точка A). Полученная таким способом система координат имеет обозначение Z'OF'. В ней центральная частота спектральной гармоники рассеивателя A в момент времени
точке E. Из геометрических соображений ясно, что результат нахождения доплеровской частоты рассеивателя во второй момент времени не изменится, если повороту на угол Δγ (в сторону, противоположную повороту рассеивателя) подвергнуть систему координат ZOF, а рассеиватель оставить неподвижным (точка A). Полученная таким способом система координат имеет обозначение Z'OF'. В ней центральная частота спектральной гармоники рассеивателя A в момент времени  будет представлена точкой B, причем
будет представлена точкой B, причем  .
.
Пусть  центральные доплеровские частоты рассеивателя A в моменты времени
центральные доплеровские частоты рассеивателя A в моменты времени  Тогда продольная координата zA
Тогда продольная координата zA может быть рассчитана по формуле
может быть рассчитана по формуле
Обобщая данное выражение для расчета координаты zi при построении РЛИ i-го рассеивателя, а также учитывая, что центральные частоты гармоник рассеивателей Fdi пропорциональны их линейным удалениям от линии визирования ρ┴i, получим
т. к. все рассеиватели поворачиваются за время  на одинаковый угол Δγ.
на одинаковый угол Δγ.
Имея для каждого i-го рассеивателя по две координаты, можно в системе ZOF построить РЛИ всего объекта. Геометрическое построение РЛИ цели методом триангуляции означает нахождение точек пересечения лучей, проведенных из максимумов спектральных составляющих рассеивателей в портретах. При этом лучи проводятся перпендикулярно к частотным осям, повернутым относительно друг друга на угол Dg, а точками пересечений (элементами РЛИ) считаются только те, что принадлежат лучам, проведенным из гармоник с одинаковыми порядковыми номерами.
Для большей информативности РЛИ цели вокруг каждого i-го рассеивателя проводится окружность, радиус которой пропорционален его отражательной способности, т.е. величине 
Достоинством триангуляционного способа является его инвариантность к положению и изменению центра сопровождения цели, что можно доказать математически. Пусть при втором синтезировании радиальная скорость центра сопровождения цели изменилась на величину ΔF относительно своего значения в момент времени  Тогда к доплеровской частоте каждого рассеивателя во второй момент времени
Тогда к доплеровской частоте каждого рассеивателя во второй момент времени  добавится величина ΔF Выражение для расчета радиальной координаты примет вид
добавится величина ΔF Выражение для расчета радиальной координаты примет вид
откуда следует, что следствием доплеровской добавки ΔF будет соответствующее изменение координаты z каждого рассеивателя на одинаковую величину. Таким образом, РЛИ всей цели будет при этом перемещаться вдоль оси OZ, а его форма останется неизменной.
Литература
1. Doppler imaging of target. Заявка N 2189962. Великобритания, кл. G 01 S 13/89. Voles Roger; EMI LTD. N 8224903. (прототип).
2. Стайнберг Б.Д, Формирование радиолокационного изображения самолета в диапазоне СВЧ // ТИИЭР. 1988. N 12, Т.76. С. 26 46.
3. Зиновьев Ю.С. Пасмуров А.Я. Методы обращенного синтезирования апертур в радиолокации с помощью узкополосных сигналов //Зарубежная радиоэлектроника. 1985. N 3. С. 27 39.
4. Заявка N 93057639/09, кл. G 01 S 13/89, приоритет 1993 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| МНОГОПОЛЯРИЗАЦИОННЫЙ СПОСОБ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2139553C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| СПОСОБ ВЫБОРА ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ С РАССЧИТЫВАЕМОЙ УГЛОВОЙ СКОРОСТЬЮ ПОВОРОТА ЦЕЛИ ОТНОСИТЕЛЬНО РАДИОЛОКАТОРА | 2007 |
|
RU2360267C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
Триангуляционный способ построения двумерного радиолокационного изображения воздушной цели в РЛС с инверсным апертурным синтезом и узкополосным зондирующим сигналом. Изобретение относится к радиолокации и может быть использовано для повышения качества распознавания воздушных целей. Цель изобретения - повысить точность построения радиолокационного изображения, чем снизит ошибки распознавания целей. Для этого предлагается анализировать структуру доплеровских портретов цели, полученных при изменении ракурса локации на 0,5o. На основе анализа расчетным путем определяются координаты локальных рассеивателей поверхности цели в системе координат, связанной с центром сопровождения цели. Способ инвариантен к положению и изменению доплеровской частоты центра сопровождения цели, а также лишен множества ошибок построения изображения, связанных с различными допущениями, принятыми в прототипе. 1 ил.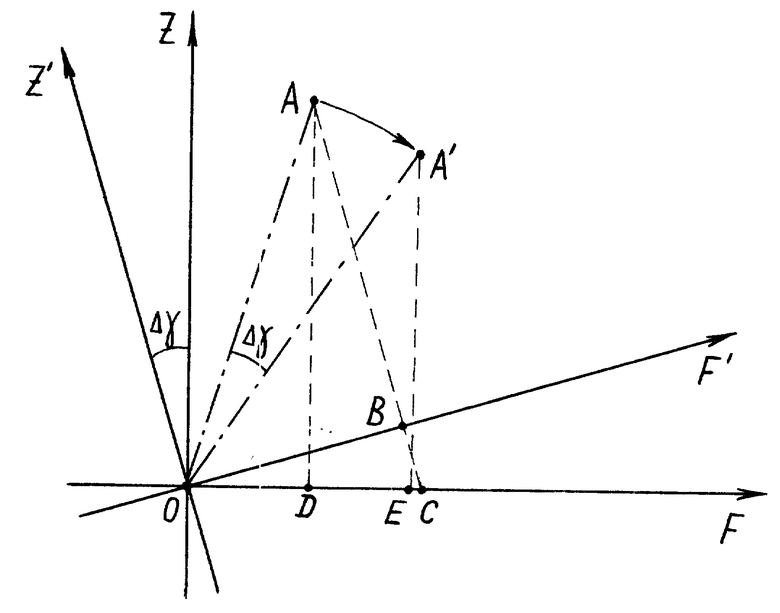
Триангуляционный способ построения двумерного радиолокационного изображения цели в РЛС сопровождения с инверсным синтезированием апертуры, заключающийся в том, что излучают узкополосные когерентные сигналы в направлении цели, принимают сигналы, отраженные совокупностью рассеивающих центров на поверхности цели, запоминают их, определяют изменение доплеровских частот отраженных сигналов, отличающийся тем, что при сопровождении прямолинейно движущейся цели рассчитывают время смещения Δt для двух равных интервалов синтезирования по формуле
где r наклонная дальность до цели;
v скорость полета цели;
γ - ракурс цели,
за счет смещения двух равных интервалов синтезирования на время Δt изменяют ракурс локации Δγ на 0,5o, амплитудные и фазовые характеристики запомненных сигналов подвергают быстрому преобразованию Фурье, формируют сигналы, соответствующие огибающим низкочастотных первого и второго доплеровских спектров, которые по времени соответствуют серединам первого t'0 и второго t''0 интервалов синтезирования, определение изменения доплеровских частот отраженных сигналов осуществляют путем анализа огибающих первого и второго доплеровских спектров, нумеруют в них гармоники, определяют амплитуды Ai и центральные частоты Fgi(t'0) и Fgi(t''0) i-х спектральных гармоник, соответствующих i-м рассеивателям в первом и втором интервалах синтезирования, где i 1,2,3, рассчитывают эффективную площадь рассеяния i-го рассеивателя si, центральные частоты i-х гармоник в первом доплеровском спектре пересчитывают в линейные дальности  соответствующих i-х рассеивателей от линии визирования цели в азимутальном направлении по формуле
соответствующих i-х рассеивателей от линии визирования цели в азимутальном направлении по формуле
где λ - длина волны, рассчитывают радиальные дальности i-х рассеивателей Zi относительно центра сопровождения цели по формуле
и в двумерной системе координат азимут дальность, связанной с центром сопровождения цели по значениям  формируют двумерное радиолокационное изображение цели, состоящее из точек по числу гармоник, определяемых при анализе доплеровских частот отраженного совокопнутостью рассеивающих центров на поверхности цели сигнала, а вокруг точек проводят окружности, радиусы которых пропорциональны величинам эффективных площадей рассеяния σi соответствующих рассеивателей.
формируют двумерное радиолокационное изображение цели, состоящее из точек по числу гармоник, определяемых при анализе доплеровских частот отраженного совокопнутостью рассеивающих центров на поверхности цели сигнала, а вокруг точек проводят окружности, радиусы которых пропорциональны величинам эффективных площадей рассеяния σi соответствующих рассеивателей.
| GB, патент, 2189962, кл.G 01S 13/89, 1985. |
