Изобретение относится к электротехнике и может быть использовано в электроприводах производственных механизмов, где двигатели работают на общую нагрузку, например на подъемно-транспортных механизмах.
Известен электропривод переменного тока, содержащий два асинхронных электродвигателя, тиристорный коммутатор в цепи обмотки статоров электродвигателей, последовательно соединенные блок сравнения, усилитель и блок импульсно-фазового управления, выход которого соединен со входом тиристорного коммутатора, блок задания, два датчика скорости, каждый из которых установлен на валу соответствующего электродвигателя, генератор импульсов, переключатель, вход которого соединен с выходом датчиков скорости вращения, а выход которого соединен со входом блока сравнения [1]. Недостатком устройства является его сложность, так как необходима установка датчиков скорости, вращения, генератора импульсов и системы управления для выравнивания скоростей двигателей.
Наиболее близким к предлагаемому является двухдвигательный электропривод, содержащий два асинхронных двигателя с фазным ротором, два нерегулируемых мостовых выпрямителя, причем вход первого выпрямителя подключен к обмоткам ротора первого двигателя, а вход второго выпрямителя подключен к обмоткам ротора второго двигателя, нерегулируемые мостовые выпрямители соединены между собой параллельно, причем положительный выход первого выпрямителя подключен к положительному выходу второго выпрямителя, а отрицательный выход первого выпрямителя подключен к отрицательному выходу второго выпрямителя, к положительным выходам нерегулируемых выпрямителей подключен положительный вход инвертора, выход которого подключен к обмоткам статоров двигателей, соединенным параллельно, а отрицательный вход инвертора подключен через сглаживающий реактор к отрицательному выходу питающего выпрямителя, а положительный выход питающего выпрямителя подключен к отрицательным выходам нерегулируемых выпрямителей, силовой вход питающего выпрямителя подключен к сети, а его управляющий вход подключен к устройству регулирования выходного напряжения, инвертор выполнен автономным, его управляющий блок подключен к устройству регулирования выходной частоты.
Недостатком данного устройства является его сложность, так как для регулирования частоты вращения двигателя необходимо одновременно изменять частоту на выходе инвертора и напряжение на выходе питающего выпрямителя с помощью блоков управления инвертором и выпрямителем, что требует использования двухканальной системы управления.
Предлагаемый двухдвигательный электропривод содержит два асинхронных двигателя с фазным ротором, два трехфазных мостовых выпрямителя, причем вход первого мостового выпрямителя подключен к обмоткам ротора первого двигателя, а вход второго мостового выпрямителя подключен к обмоткам ротора второго двигателя, еще один третий выпрямитель, вход которого подключен к питающей сети, трехфазный инвертор, выход которого подключен к обмоткам статоров двигателей, соединенным параллельно, первые два мостовых выпрямителя соединены между собой параллельно, причем положительный выход первого выпрямителя соединен с положительным выходом второго выпрямителя, а отрицательный выход первого выпрямителя соединен с отрицательным выходом второго выпрямителя, к положительным выходам этих двух выпрямителей подключен положительный вход трехфазного инвертора, отрицательный вход которого подключен к отрицательному выходу третьего выпрямителя, положительный вход которого подключен к одному выводу обмотки сглаживающего реактора, другой вывод обмотки которого подключен к отрицательным выводам двух параллельно соединенных мостовых выпрямителей, у которых вентили, составляющие группы отрицательного выхода выпрямителя, выполнены из диодов, а вентили, составляющие группы положительного выхода выпрямителя, выполнены из тиристоров, к управляющему входу каждого из шести тиристоров этих двух выпрямителей подключен катод одного из шести защитных диодов, аноды которых соединены в общую точку и подключены к одному выводу регулируемого резистора, к другому выводу которого подключены соединенные в общую точку катоды других шести диодов, анод первого из этих диодов подключен к первой фазе обмотки ротора первого двигателя, анод второго диода подключен ко второй фазе обмотки ротора первого двигателя, анод третьего диода подключен к третьей фазе обмотки ротора первого двигателя, анод четвертого диода подключен к первой фазе обмотки ротора второго двигателя, анод пятого диода подключен ко второй фазе обмотки ротора второго двигателя, а анод шестого диода подключен к третьей фазе обмотки ротора второго двигателя, к общей точке соединения положительных выходов первого и второго мостовых выпрямителей подключен катод дополнительного диода, анод которого подключен к общей точке соединения отрицательных выходов первого и второго мостовых выпрямителей.
В данном двухдвигательном электроприводе скорости двигателей регулируются путем изменения величины сопротивления управляющего резистора, при этом обеспечивается синхронизация скоростей двигателей. Электропривод имеет простую конструкцию и высокую надежность.
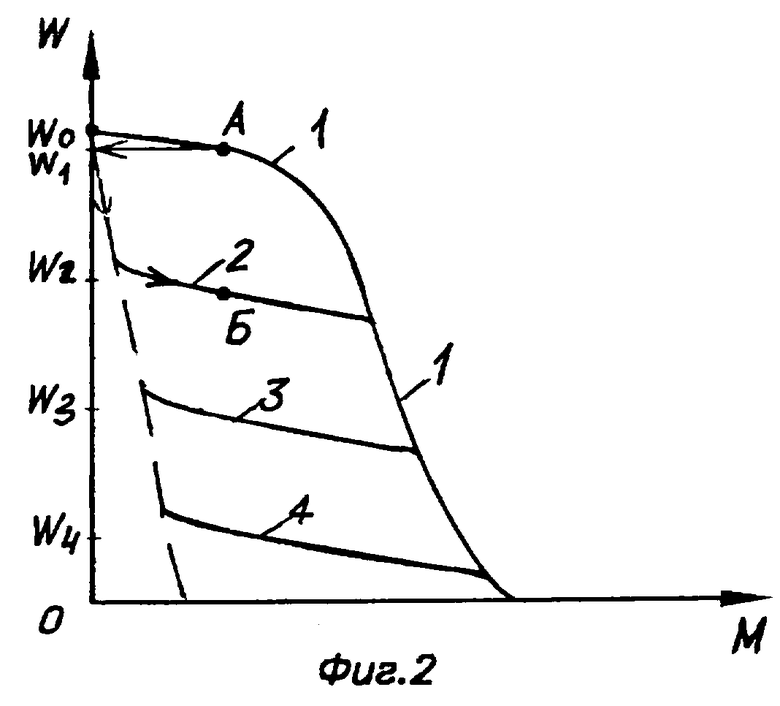
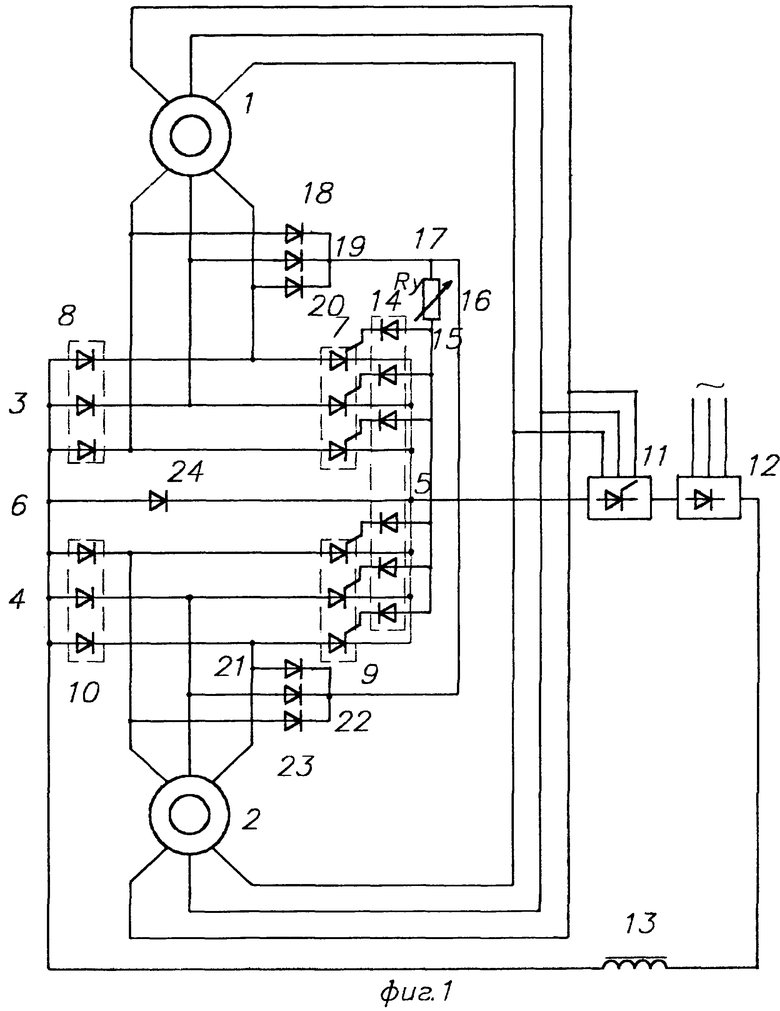
На фиг.1 приведена электрическая схема устройства, на фиг.2 - экспериментальные механические характеристики.
Двухдвигательный электропривод содержит два асинхронных двигателя 1 и 2, концы обмоток роторов двигателей подключены к входам мостовых выпрямителей 3 и 4, соединенных параллельно так, что положительный выход выпрямителя 3 соединен с положительным выводом выпрямителя 4 в общую точку 5, а отрицательный выход выпрямителя 3 соединен с отрицательным выходом выпрямителя 4 в общую точку 6, у выпрямителя 3 группа вентилей 7, соединенная с общей точкой 5 положительного выхода выпрямителей 3 и 4 выполнена из тиристоров, у этого же выпрямителя 3 группа вентилей 8, соединенная с общей точкой 6 отрицательного выхода выпрямителей 3 и 4, выполнена из диодов, у выпрямителей 4 группа вентилей 9, соединенная с общей точкой 5 положительного выхода выпрямителей 3 и 4, выполнена из тиристоров, у этого же выпрямителя 4 группа вентилей 10, соединенная с общей точкой 6 отрицательного выхода выпрямителей 3 и 4, выполнена из диодов. К общей точке 5 положительного выхода выпрямителей 3 и 4 подключен положительный вывод от входа трехфазного инвертора 11, отрицательный вывод от входа которого подключен к отрицательному выводу от выхода выпрямителя 12, вывод от положительного выхода которого подключен к первому выводу обмотки сглаживающего реактора 13, второй вывод обмотки которого подключен к общей точке 6 соединения выпрямителей 3 и 4, трехфазный выход инвертора 11 соединен с параллельно включенными трехфазными обмотками статоров двигателей 1 и 2, вход выпрямителя 12 подключен к питающей сети. К управляющему электроду тиристоров 7 выпрямителя 3 и тиристоров 9 выпрямителя 4 подключен катод одного из шести защитных диодов 14, аноды которых соединены в общую точку 15, к которой подключен один вывод регулируемого резистора 16, другой вывод которого подключен к общей точке 17, к которой также подключены катоды трех диодов 18, 19, 20 и еще трех диодов 21, 22, 23, анод диода 18 подключен к первой фазе обмотки ротора двигателя 1, анод диода 19 подключен ко второй фазе обмотки ротора двигателя 1, анод диода 20 подключен к третьей фазе обмотки ротора двигателя 1, анод диода 21 подключен к первой фазе обмотки ротора двигателя 2, анод диода 22 подключен ко второй фазе обмотки ротора двигателя 2, анод диода 23 подключен к третьей фазе обмотки ротора двигателя 2. К общей точке 5 соединения выпрямителей 3 и 4 подключен катод диода 24, а к общей точке 6 соединения выпрямителей 3 и 4 подключен анод диода 24.
Двухдвигательный электропривод работает следующим образом. При включении выпрямителя 12 питающее напряжение подводится через реактор 13 и диод 24 ко входу инвертора 11, при включении которого напряжение с его выхода подается на параллельно соединенные обмотки статоров двигателей. В обмотках роторов двигателей 1, 2 наводится ЭДС. Напряжение с выводов обмоток ротора двигателя 1 через диоды 18-20, резистор 16 и защитные диоды 14 поступает на управляющие электроды группы тиристоров 7 выпрямителя 3, а напряжение с выводов обмоток ротора двигателя 2 через диоды 21-23, резистор 16 и защитные диоды 14 поступает на управляющие электроды группы тиристоров 9 выпрямителя 4. Группы тиристоров 7 и 9 открываются, и напряжение с выходов выпрямителей 3 и 4 складывается с напряжением на выходе выпрямителя 12 и это суммарное напряжение подается на вход инвертора 11.
Инвертор 11 является источником противоЭДС Еи, введенной в цепи роторов двигателей 1 и 2. Вместе с тем, сумма напряжения выпрямителя 12 Ud и выпрямленной ЭДС роторов двигателей E2d*S, пропорциональной скольжению S, больше ЭДС инвертора Еи, что определяет протекание тока в выпрямленной цепи Id:
где RЭ - эквивалентное суммарное сопротивление всех элементов, приведенное к выпрямленной цепи;
ΔUвΣ - суммарное падение напряжения на вентилях схемы.
При равенстве скоростей и скольжении двигателей ЭДС их обмоток роторов равны между собой  . Если, например, двигатель 1 обогнал двигатель 2, его скольжение уменьшается S1<S2, тогда
. Если, например, двигатель 1 обогнал двигатель 2, его скольжение уменьшается S1<S2, тогда  , и мостовой выпрямитель 4 подпирает мостовой выпрямитель 3. В результате эквивалентная противоЭДС в цепи ротора двигателя 1 становится больше, чем эквивалентная противоЭДС в цепи ротора двигателя 2, поэтому двигатель 1 подтормаживается и скорости двигателей выравниваются. Таким образом, в электроприводе осуществляется синхронизация скоростей двигателей.
, и мостовой выпрямитель 4 подпирает мостовой выпрямитель 3. В результате эквивалентная противоЭДС в цепи ротора двигателя 1 становится больше, чем эквивалентная противоЭДС в цепи ротора двигателя 2, поэтому двигатель 1 подтормаживается и скорости двигателей выравниваются. Таким образом, в электроприводе осуществляется синхронизация скоростей двигателей.
В данном электроприводе обмотки статоров и роторов двигателей 1 и 2 с помощью звена постоянного тока соединены в общую электрическую цепь, и энергия скольжения двигателей передается из цепей роторов двигателей непосредственно в обмотки их статоров, обеспечивая электроприводу высокие энергетические показатели. Питающий выпрямитель 12 может быть неуправляемым, выполненным из диодов, в этом случае напряжение на его выходе Udo будет иметь постоянное значение Udo=const. На фиг.2 линия 1 показывает механическую характеристику при условии Udo=const и Rymin, то есть сопротивление резистора 16 имеет минимальное значение. В этом случае тиристорные группы 7 выпрямителя 3 при любой скорости двигателей 1 и 2 получают сигнал управления с обмоток роторов двигателей, достаточный для их открывания, т.е. работают в режиме диодов.
При увеличении сопротивления Ry резистора 16 на нем возрастает падение напряжения от тока управления группами тиристоров 7 выпрямителя 3 и тиристоров 9 выпрямителя 4. Ток управления группами 7 и 9 тиристоров снижается. Если двигатели работали в точке А на линии 1 (см. фиг.2), то при увеличении сопротивления Ry тиристоры группы 7 выпрямителя 3 и группы 9 выпрямителя 4 получают ток управления, недостаточный для их открывания, поэтому эти тиристоры будут в закрытом состоянии. Токи роторов двигателей 1 и 2 прерываются, двигатели тормозятся до скорости W1, при этом скольжения S1 и S2 двигателей возрастают, ЭДС роторов двигателей  и
и  возрастают, следовательно, возрастает ток управления группами тиристоров выпрямителей 3 и 4. В точке Б на линии 2 (см. фиг.2) тиристоры выпрямителей 3 и 4 будут открытыми и двигатели 1 и 2 будут работать при установившейся скорости вращения. При изменении нагрузки на валах двигателей 1 и 2 при постоянном значении сопротивления Ry резистора 16 двигатели будут работать на механической характеристике, показанной на фиг.2 линией 2. При дальнейшем увеличении сопротивления Ry резистора 16 двигатели 1 и 2 перейдут на механическую характеристику с меньшей скоростью W2, показанной на фиг.2 линией 3. При еще большем увеличении сопротивления Ry резистора 16 двигатели 1 и 2 перейдут на механическую характеристику, показанную на фиг.2 линией 4 и т.д. Таким образом, установившуюся частоту вращения двигателей 1 и 2 регулируют путем изменения сопротивления Ry резистора 16.
возрастают, следовательно, возрастает ток управления группами тиристоров выпрямителей 3 и 4. В точке Б на линии 2 (см. фиг.2) тиристоры выпрямителей 3 и 4 будут открытыми и двигатели 1 и 2 будут работать при установившейся скорости вращения. При изменении нагрузки на валах двигателей 1 и 2 при постоянном значении сопротивления Ry резистора 16 двигатели будут работать на механической характеристике, показанной на фиг.2 линией 2. При дальнейшем увеличении сопротивления Ry резистора 16 двигатели 1 и 2 перейдут на механическую характеристику с меньшей скоростью W2, показанной на фиг.2 линией 3. При еще большем увеличении сопротивления Ry резистора 16 двигатели 1 и 2 перейдут на механическую характеристику, показанную на фиг.2 линией 4 и т.д. Таким образом, установившуюся частоту вращения двигателей 1 и 2 регулируют путем изменения сопротивления Ry резистора 16.
В данном устройстве инвертор 11 обеспечивает только одну частоту напряжения на выходе, равную номинальной частоте двигателей, что значительно упрощает конструкцию инвертора, снижает его стоимость и повышает надежность. Питающий выпрямитель 12 может быть нерегулируемым, выполненным из диодов, что упрощает его конструкцию, снижает его стоимость и повышает надежность.
Таким образом, двухдвигательный электропривод имеет простую и надежную систему регулирования угловой скорости двигателей вниз от основной скорости с диапазоном регулирования до 10:1, при этом энергия скольжения из обмотки ротора возвращается в обмотку статора, что обеспечивает экономичность работы электропривода при любой угловой скорости двигателя. Кроме того, в двухдвигательном электроприводе обеспечена синхронизация угловых скоростей двигателей.
Литературные источники
1. Авторское свидетельство СССР № 904171, МКИ Н 02 Р 5/46, 13.06.80.
2. Патент РФ № 2160495. Двухдвигательный электропривод, В.Н.Мещеряков, В.В.Федоров, Д.С.Осипов, МКИ Н 02 Р 7/74, 10.12.2000, бюл. № 34.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| Двухдвигательный электропривод | 1985 |
|
SU1310986A2 |
| Электропривод | 1990 |
|
SU1746505A1 |
| Двухдвигательный электропривод переменного тока | 1985 |
|
SU1292159A1 |
| Электропривод переменного тока | 1985 |
|
SU1319215A1 |
| Двухдвигательный электропривод | 1983 |
|
SU1176436A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2237344C2 |
| Электропривод переменного тока | 1986 |
|
SU1431025A1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| Асинхронный вентильный каскад | 1983 |
|
SU1115196A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах производственных механизмов, где двигатели работают на общую нагрузку. Техническим результатом является упрощение и повышение надежности. Двухдвигательный электропривод содержит два асинхронных двигателя, в цепь роторов которых включены выпрямители, анодные группы которых составлены из диодов, а катодные - из тиристоров, соединенных между собой параллельно. Последовательно с ними соединены инвертор с постоянной выходной частотой, питающий выпрямитель, сглаживающий реактор. К выходу инвертора подключены обмотки статоров обоих двигателей. Управляющие электроды тиристоров выпрямителей подключены к обмоткам роторов соответствующих двигателей через две группы диодов и резистор с регулируемым сопротивлением. Изобретение позволяет регулировать угловую скорость двигателей, возвращая при этом энергию скольжения в цепь обмоток статора двигателей, а также обеспечить синхронизацию угловых скоростей двигателей. 2 ил.
Двухдвигательный электропривод, содержащий два асинхронных двигателя с фазным ротором, два трехфазных мостовых выпрямителя, причем вход первого мостового выпрямителя подключен к обмоткам ротора первого двигателя, а вход второго мостового выпрямителя подключен к обмоткам ротора второго двигателя, третий выпрямитель, вход которого подключен к питающей сети, трехфазный инвертор, выход которого подключен к обмоткам статоров двигателей, соединенным параллельно, первые два мостовых выпрямителя соединены между собой параллельно, причем положительный выход первого выпрямителя соединен с положительным выходом второго выпрямителя, а отрицательный выход первого выпрямителя соединен с отрицательным выходом второго выпрямителя, к положительным выходам этих двух выпрямителей подключен положительный вход трехфазного инвертора, отрицательный вход которого подключен к отрицательному выходу третьего выпрямителя, положительный вход которого подключен к одному выводу обмотки сглаживающего реактора, другой вывод обмотки которого подключен к отрицательным выводам двух параллельно соединенных мостовых выпрямителей, отличающийся тем, что у двух параллельно соединенных мостовых выпрямителей вентили, составляющие группы отрицательного выхода выпрямителя, выполнены из диодов, а вентили, составляющие группы положительного выхода выпрямителя, выполнены из тиристоров, к управляющему электроду каждого из шести тиристоров этих двух выпрямителей подключен катод одного из шести защитных диодов, аноды которых соединены в общую точку и подключены к одному выводу регулируемого резистора, к другому выводу которого подключены соединенные в общую точку катоды других шести диодов, анод первого из этих диодов подключен к первой фазе обмотки ротора первого двигателя, анод второго диода подключен ко второй фазе обмотки ротора первого двигателя, анод третьего диода подключен к третьей фазе обмотки ротора первого двигателя, анод четвертого диода подключен к первой фазе обмотки ротора второго двигателя, анод пятого диода подключен ко второй фазе обмотки ротора второго двигателя, а анод шестого диода подключен к третьей фазе обмотки ротора второго двигателя, к общей точке соединения положительных выходов первого и второго мостовых выпрямителей подключен катод дополнительного диода, анод которого подключен к общей точке соединения отрицательных выходов первого и второго мостовых выпрямителей.
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2160495C2 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2014723C1 |
| Двухдвигательный электропривод | 1981 |
|
SU1012414A1 |
| Двухагрегатный асинхронный вентильный каскад для буровых установок | 1988 |
|
SU1658361A1 |
| GB 1531466 А, 08.11.1978 | |||
| СПОСОБ ВОССТАНОВЛЕНИЯ СОСУДИСТОГО МЕХАНИЗМА ДЕРЖАНИЯ ПРИ ФОРМИРОВАНИИ ИСКУССТВЕННОГО ЗАДНЕГО ПРОХОДА | 2004 |
|
RU2292846C2 |
| US 3519909 А, 07.07.1970 | |||
| Экономайзер | 0 |
|
SU94A1 |

