2, Устройство для управления асинхронным электродвигателем с коротко- : замкнутым ротором, содержащее мостовой инвертор напряжения, предназначенный для подключения через датчики тока к асинхронному двигателю, распределитель тактовых импульсов, выход которого через модулятор подключен к .управляющему входу инвертора, а вход через формирователь сигналов управления - к генератору управляющих импульсов, задатчик тока, соединенный с модулятором, отличающееся тем, что, с целью упрощения и повышения быстродействия, в него введен фазовый синхронный детектор реактивного тока, входы которого соединены с датчиками тока и с выходом распределителя тактовых импульсов, а выход с формирователем сигналов управления.
.3. Устройство по п. 2, о т ли ч а ю ю щ е е с я тем, что в него введен фазовый синхронный детектор полного тока, входы которого соединены с датчиками тока и с. выходом распределителя тактовых импульсов, а выход с задатчиком тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ НА ОСНОВЕ ТРЕХФАЗНОГО ТРЕХУРОВНЕВОГО АВТОНОМНОГО ИНВЕРТОРА NPC | 2023 |
|
RU2821420C1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
t. Способ управления асинхронным электродвигателем с короткозамкнутым ротором, питаемым от мостового инвертора напряжения с углом проводимости ключей 120 эл.град., при кото. ром задают начальную частоту питания электродвигателя, измеряют электрический параметр в отключенной от источника питания фазе электродвигателя, ,характеризующий положение вектора потокосцепления ротора и по измеренiHOMy электрическому параметру формируют команду на переключение ключей инвертора, о т-л и ч щ и и с я тем, что, с целью упрощения и повышения быctpoдeйcтвия, осуи ествляют широтно-импульсную модуляцию напряжения инвертора в интервале 060 эл.град. угла проводимости каждого ключа инвертора, измеряютимпульсы тока в отключенной от источника питания фазе электродвигателя, сравнивают 9 их с заданным пороговым уровнем и при достижении импульсом тока задан ного порогового уровня формируют команду, которую используют в качестве команды на переключение ключей инвертора. f/y оэ sl ; о оа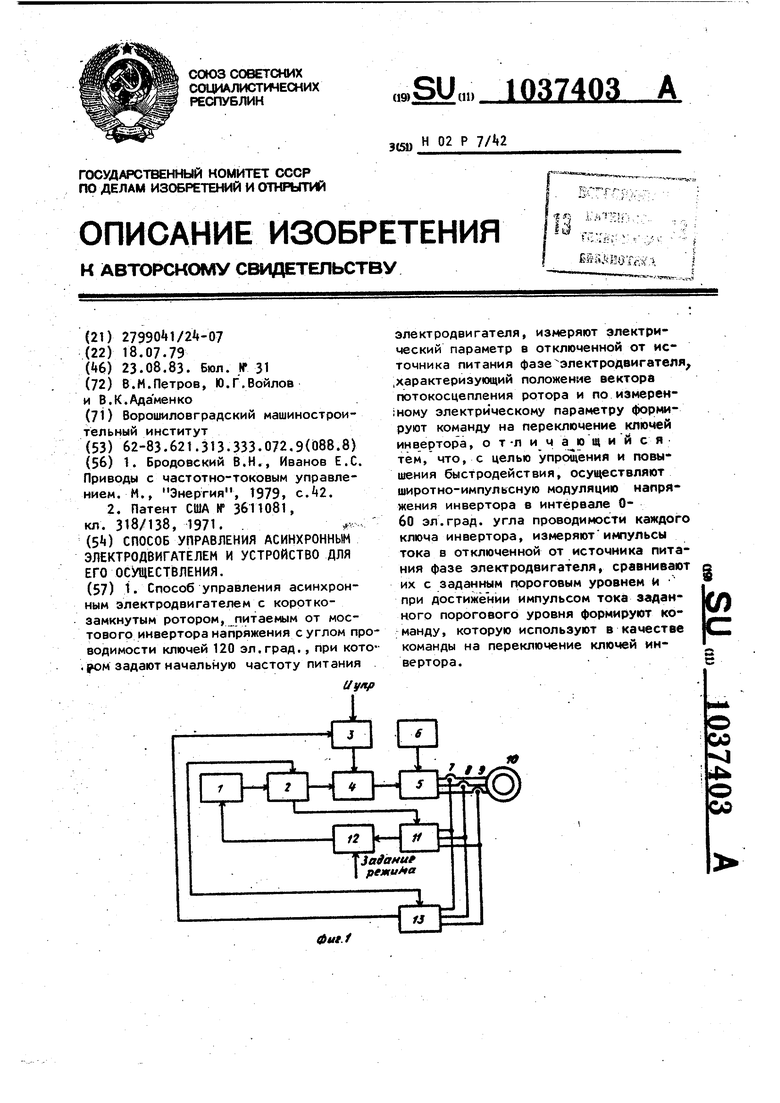
Изобретение относится к электротехнике, а именно к области частотного управления электродвигателями с короткозамкнутым .ротором, питаемым от инверторов напряжения.
Известен способ управления трехфазным асинхронным электродвигателем с короткозамкнутым ротором, при котором формируют трехфазную симметричную систему токов в фазах двигателя, а частоту питания изменяют путем суммирования частоты вращения ротора с заданной частотой абсолютного скольжения ротора СО
Устройство по указанному способу содержит инвертор напряжения, датчики тока, модулятор, задатчик тока, измеритель частоты вращения ротора 1 .
Недостатком данного способа является низкое быстродействие, обусловлeннois тем, что при управлении не используется информация об угле между вектором тока статора и вектором потокосцепления ротора. Заданная частота скольжения ротора получается, как производная угла между вектором тока статора и осью ротора асинхронного двигателя, и отрабатывается регулятором момента с большим запаздыванием. Недостатком способа также является сложность, связанная с необходимостью формирования синусоидальной системы токов в фазах электродвигателя, большие габариты и низкая надежность привода, вследствие наличия в системе управления большого количества механических и электромеханических преобразователей.
Наиболее близким к изобретению по технической сущности является способ
управления трехфазным электродвигателем, питаемым от мостового инвертора напряжения с углом проводимости клю чей 120 эл.град. при котором задают начальную частоту питания, измеряют
в отключенной от источника питания фазе сигнал ЭДС, индуцированный магнитным потоком ротора и при достижении им определенного уровня формируют команду на переключение ключей инвертора 2 .
Устройство для осуществления известного способа содержит инвертор напряжения, к которому подключен трехфазный электродвигатель, распределитель тактовых импульсов, выход которого через модулятор подключен к управляющему входу инвертора, а входк генератору управляющих импульсов, соединенному с формирователем сигналов управления, задатчик тока, соединенный с модулятором i2 ,
Недостаток известного способа и устройства состоит в том, что для из.мерения сигнала ЭДС и выделения его , на фоне помех требуются специальные фильтры, усложняющие реализацию. Кроме того, для управления двигателем с уровнем момента, близким к предельному, обеспечивающему максимальное быстродействие, необходимо использование дополнительных блоков, кор31ректирующих величину абсолютного скольжения. При осуществлении режима торможения в фазе, в которой измеряется ЭДС/ не может протекать реактивныи ток, а;следовательно, отсутствует магнитный поток, создающий тормозной момент, что также снижает быстродействие. Условие измерения ЭДС в фазе может привести к значительным перенапряжениям на ключах инвертора при их коммутации, что снижает надеж ность привода. Цель изобретения - упрощение реализации при одновременном повышении быстродействия. Поставленная цель достигается тем что согласно способу управления электродвигателем с короткозамкнутым ротором, питаемым от мостового инвертора напряжения с углом проводимости ключей 120 эл.град.)при котором задают начальную частоту питания электродвигателя, измеряют элект рический параметр в отключенной от источника питания фазе электродвигателя, характеризующий положение вектора потокосцепления ротора и по измеренному электрическому параметру формируют команду н.а переключение ключей инвертора, осуществляют широт но-импульсную модуляцию напряжения инвертора в интервале 0-60 эл.град. угла проводимости каждого ключа инвертора, измеряют импульсы тока в отключенной от источника питания фазе электродвигателя, сравнивают их с заданным пороговым уровнем и при дости жении импульсом тока заданного порогов го уровня формируют команду, которую используют в качестве команды на переключение ключей инвертора. В устройство для управления асинхронным электродвигателем с короткозамкнутым ротором, содержащее мостовой инвертор напряжения, к которому через датчики тока подключен асинхронный двигатель, распределитель тактовых импульсов, выход которого через модулятор подключен к управляю щему ВХОДУ инвертора, а вход через формирователь сигналов управления к генератору управляющих импульсов, задатчик тока, соединенный с модулятором, введен фазовый синхронный дете тор реактивного тока, входы которого соединены с датчиками тока и с выходо распределителя тактовых импульсов, а выход - с формирователем сигналов управления. 3 В другом варианте может быть ввеен фазовый синхронный детектор полого тока, входы которого соединены с датчиками тока и с выходом распределителя тактовых импульсов, а выход - с задатчиком тока. На фиг.1 показана структурная схема устройства для управления асинхронным электродвигателем; на фиг.2 диаграмма фазных токов. Генератор 1 управляющих импульсов соединен с распределителем 2 тактовых импульсов, выход которого и выход задатчика 3 тока подключены к модуяятору А. Выход модулятора k подсоединен к управляющему входу инвертора 5, силовой вход которого подключен к источнику 6 постоянного тока. Выходы инвертора 5 через датчики тока соединены с асинхронным электродвигателем 10. Выходы датчиков 7-9 тока соединены через синхронный детектор 11 реактивного тока с формирователем 12 сигналов управления. Кроме того, выходы этих же датчиков тока подключены к синхронному детектору 13 полного тока, дополнительный вход которого соединен с распределителем 2 импульсов. Генератор 1 управляющих импульсов задает начальную частоту. Ее величина определяется максимальной частотой питания электродвигателя, при которой на его естественных механических характеристиках нет участка провала момента. Распределитель 2 тактовых импульсов формирует временную последовательность шести тактовых импульсов шириной 120 эл.град. периода частоты питания электродвигателя каждый.. Задатчик 3 тока формирует импульсы напряжения, частота и скважность которых задает величину тока в фазах электродвигатели либо скважность широтно-импульсной модуляции, и импульсы поступают на модулятор-J и модулируют поступающие туда же с распределителя 2 тактовые импульсы. Причем тактовые импульсы модулируются в интервале t)-60 эл.град. форма и по,следовательность которых показана на диаграмме фиг.2. Инвертор 5 напряжения выполнен по традиционной трехфазной мостовой схеме и управляется тактовыми импульсами (фиг.2). Синхронный детектор 11 реактивного тока позволяет выделить сигнал реактивного тока, прптекаюи1его в фазе
электродвигателя, отключенной от источника питания постоянного тока и замкнутой через один из диодов моста обратного тока инвертора и клюм, находящийся в открытом состоянии, на другую фазу. Выход фазового синхронного детектора 11 реактивного тока соединен с фopмиpoвateлeм 12 сигналов управления, который в зависимости от задания режима (двигательного или тормозного) формирует команды, синхронизирующие генератор управляющих импульсов.
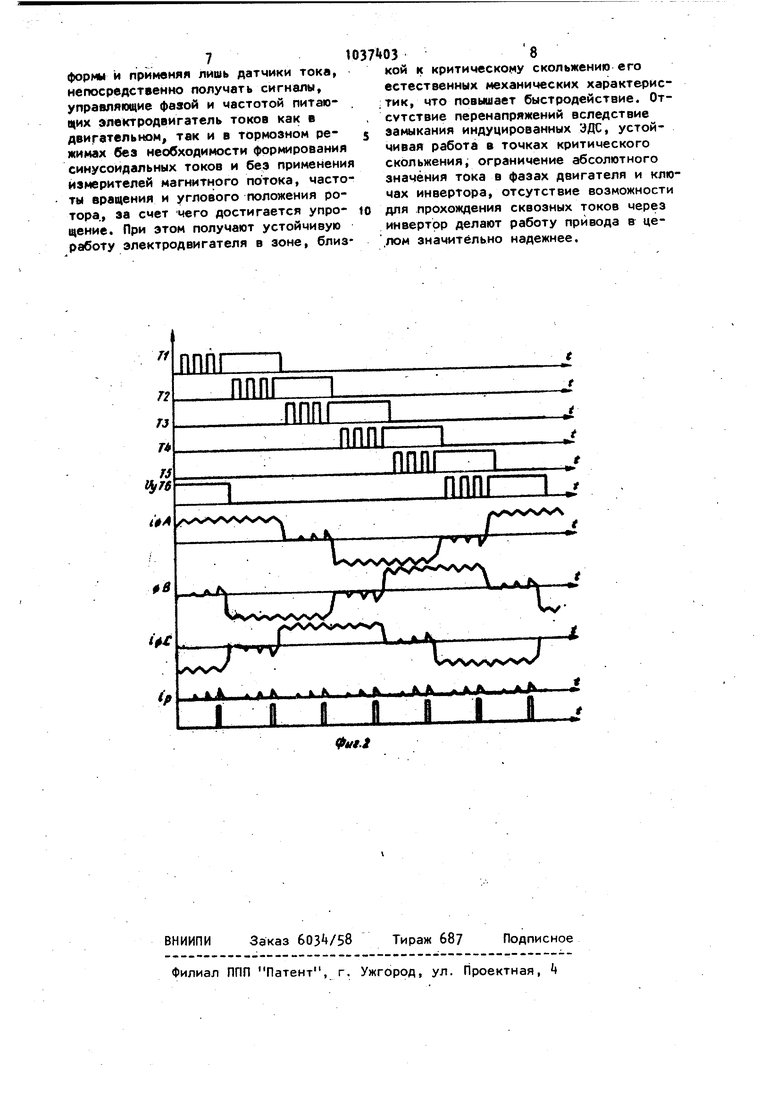
Работа устройства-, реализующего данный способ,.состоит в следующем. При формировании в фазах электродвигателя тока прямоугольной формы ин- , вертором напряжения с углом проводи,мости силовых ключей 120 эл.град, и модуляции в промежутке О - i 60 эл.град. в каждой из трех фаз в течение 120 эл.град. полупериода пр6 текает заданный ток, и в течение оставшихся 60 эл.град. полупериода протекает реактивный ток, обусловленный ЭДС, индуцированной магнитным потоком ротора. Мгновенные значения реактивного тока определяются абсолютной частотой вращения и величиной вектора потокосцепления ротора, а также углом между вектором тока статора и вектором потокосцепления ротора. Максимальная величина этого угла соответствует максимальной величине двигательного и тормозного электромагнитного момента для заданного тока при скольжении, близком к критическому. При этом реактивный ток в отключенной от источника питания фазе стремится к нулю.
При работе в двигательном режиме сигнал, переключающий инвертор 5, формируют при возрастании импульсов тока до уровня, определяемого нижним порогом чувствительности датчиков 7-9 тока. Таким образом, абсолютная величина реактивной составляющей полного тока в фазах двигателя ограничивается на уровне, определяемом нижним порогом чувствительности и коэффициентом передачи датчиков тока и практически может сводиться к нулю. Это значит., что при любых моментах нагрузки как статических, так и динаических, частота переключений автомаически устанавливается такой, что ля любых заданных значений либо кважности широтно-импульсной модуяции электродвигатель находится всегда в точке скольжения, характеризующейся максимальным моментом.
При работе электродвигателя в тормозном режиме сигнал, переключающий инвертор 5, формируют при снижении величины импульсов тока до уровня, определяемого чувствительностью
датчиков тока. Автоматически устанавливающаяся при этом частота питания электродвигателя ниже частоты вращения ротора и ее величина такова, что электродвигатель находится близко к точке критического скольжения его механических характеристик в области отрицательных моментов. Ток в отключенной фазе представляет собой функцию, убывающую от максимума в начале отключения до нуля в конце, когда, собственно, и формируют сигнал, переключающий инвертор. Если формировать сигнал, переключающий инвертор до того, как ток достиг нуля, то при этом же задании тока в фазах электродвигателя тормозной момент будет меньше. Если переключение производить позже того, как ток в отключенной фазе достиг нуля, произойдет переход на.неустойчивую часть механических характеристик, т.е. опрокидывание электродвигателя.
НгЭ фиг.2; изображена диаграмма напряжений Т1-Т6, управляющих ключами трехфазного Mocfoeoro инвертора напряжения, и соответствующие им токи фд, 1фв, |фс в фазах А, В и С для двигательного режима. Дополнително показаны выделенные и продетектированные импульсы тока ip в отключенны от источника питания постоянного тока фазах электродвигателя. Пунктирная линия показываетнижний порог чувствительности датчиков тока, при котором происходит перекгяочение инветора. Импульсы U, управляющие частотой тактов переключения инвертора, формируются в момент совпадения тока в отключенной фазе с порогом чувствительности датчиков тока. Из диаграммы видно, что широтно-импульсная модуляция производится в первые 60 эл.град. проводящего состояния ключей инвертора, только в этом случае осуществляется замыкание индуцированной ЭДС в отключенной фазе.
Таким образом, способ управления асинхронным эле| тродвйгателем и устройство для его осуществления позволяют, используя постой инвертор напржения, формирующий ток прямоугольной форкм и применяя лишь датчики тока, непосредственно получать сигналы, управляющие фазой и частотой питающих электродвигатель токов как в двигательном, так и в тормозном режимах без необходимости формирования синусоидальных токов и без применени измерителей магнитного потока, часто ты вращения и углового положения ротора., за счет чего достигается упрощение. При этом получают устойчивую работу электродвигателя в зоне, близ
ппг
пппг
ж А А ж А ж л А fc
L I J I
i
пппг
пппг
, А. К А К , - Q3 кой к критическому скольжению его естественных механических характеристик, что повышает быстродействие. Отсутствие перенапряжений вследствие замыкания индуцированных ЭДС, устойчивая работа в точках критического скольжения, ограничение абсолютного значения тока в фазах двигателя и ключах инвертора, отсутствие возможности для прохождения сквозных токов через инвертор делают работу привода в це.лом значительно надежнее.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бродовский В.Н., Иванов Е.С | |||
| Приводы с частотно-токовым управлением | |||
| М., Энергия, 1979, с.2 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США W 3611081, кл | |||
| Способ получения древесного угля | 1921 |
|
SU313A1 |
