со 00
О5
со
Изобретение относится к электротехнике и может быть использовано в электроприводах установок с регулированием скорости в вгироком диапазоне.
Цель лзобретения - повьппение надежности и КПД.
На чертеже представлена принплпи- ,альная электрическая схема устройства для реализации данного способа о
Устройство для управления асинхронным двигателем 1 с фазным ротором содержит стабилизатор 2 тока, выполненный, например, в виде индуктивно- емкостного преобразователя, два трехфазных мостовых вьтрямителя 3, 4, резистор 5, два датчика 6, 7, каждый и KOToptiix вьтолнен, например, в виде трансформатора с вьтрямителем и переменным резистором, причем первичная обмотка трансформатора образует вход а выход выпрямителя - выход каждого датчика 6,7, регулятор 8 напряжения с двумя управляющими входами, подключенными к выходам соответствующих датчиков 6,7, входы регулятора 8 напряжения и стабилизатора 2 тока предназначены для подключения питающей сети, выход регулятора 8 напряжения подключен к входу одного датчика 7 и предназначен для подключения выводов обмотки статора асинхронного двигателя 1, выход стабилизатора 2 тока подключен к входу одного трехфазного мостового вьтрямителя 4, выход которого через резистор 5 подклчен к выходу другого трехфазного мостового выпрямителя, вход которого подключен к входу другого датчика 6 и предназначен для подключения выводов обмотки ротора асинхронного
двигателя 1, I
-В устройстве, представленном на
чертеже, способ управления асинхронным двигателем с фазным ротором реализуется следующим образом. С помощью стабилизатора 2 тока в обмотку ротора асинхронного двигателя 1 через трехфазные мостовые выпрямители 3, 4 и резистор 5 подается неизменный по амплитуде и фазе перемен- Hbtfi ток. ( помощью датчиков 6 и 7 выделяются напряжения, пропорциональные соответственно ЭДС ротора и магнитному потоку статора, которые поступают затем на управляютцие входы регулятора Я напряжения. В зависимости от величины и знака рассогла0
5
0
5
0
сования этих напряжений и от заданного значения скорости двигателя 1 формируется сигнал управления регулятора 8 напряжения, например изменяется угол проводимости тиристоров, если используется тиристорный регулятор. В случае стабилизации скорости двигателя 1 рассогласован 1е напряжений датчиков 6, 7 сводится к минимально возможному значению либо (при измерении скорости двигателя) соотношение этих напяржений поддерживается на заданном уровне путем изменения амплитуды напряжения, подаваемого на обмотку статора двигателя 1 от регулятора 8 напряжения.
Ниже проводятся предпосылки, положенные в основу данного способа.
ЭДС статорной обмотки при постоянной частоте подводимого к статору напряжения
Е, kf , (1) где Е(- ЭДС статорной обмотки;
f - частота питающего напряжения;
- магнитный поток статора; k - ПОСТОЯННЕЙ коэ(Ьфициент.
Поскольку ЭДС ротора асинхронной машины равна
1
Ф
F - F Я
li pЬ , Й ,
14
(2)
где kt, - коэффициент трансформации или коэффициент приведения напряжений асинхронной машины;
S - скольжение, то
Ф S.
где kp
Ер kg
kf k
(3)
Известно, что момент, развиваемый двигателем, равен
М, k I COSCf,
3
(4)
где k - постоянный коэффициент; It роторный ток двигателя; г - угол сдвига фаз между Г. „
и
Так как в предложенном способе п роторную цепь подают нсизмонньй по фазе ток, то вьфажеиие (4) можно записать следующим образом
5 k,ФI,, (Я
где k k, cos - постоянный коэффициент.
Таким образом, ичмеряеьтьй магнитный поток в соответствии с выражением (5) будет равен
313816
Mfl
, (6)
f г ЭДС ротора из выражений (3) и (5)
k M.S
-i-.-
V т м- -г
(7)
Если обозначить формируемые сигналы (и,, Uj) как некоторые функции от действительных значений магнитно- ного потока и ЭДС ротора, т.е.
и, f, (Ф ) f, (М;
-).
k,M,S
и. f.() .(-г/1Г
то, поскольку роторный ток имеет постоянную амплитуду и фазу, можно записать:
и, f, (м),
Uo f (Kg.S).
1 м 11 и окончательно получим
S F (MJ.
(13)
Сравнивая эти сигналы, получаем некоторьй сигнал Uj, как функцию
MU и S
о
з f.U.. и,) f(M S). (10)
о
Так как магнитный поток статора в предлагаемом способе управляется в функции сигнала U, то
Р ff (Mq,S) (11) о
или, учитывая уравнение (6),
М
f5(M. S) (12)
Поскольку угловая скорость двига- дз теля связана со скольжением зависимостью
СО (l-S)cOo, ZTf
(14)
где сОд ---- - синхронная угловая
скорость двигателя;
Р - число пар полюсов двигателя, то при постоянстве частоты подводи- мога- к статорной обмотке напряжения угловая скорость и скольжение связаны линейной зависимостью и из выражений (13), (1А) можно записать
10
)
, 15
25
30
35
40
дз 50
55
79
U 1-F (М )сОо F, (М ). (1V)
«о
Отсюда можно увидеть, чтс, релли- зуя требуемые функш1онал, запиги- мости f( - f5, можно сформировать требуемый закон изменения скол1,жения (угловой скорости) от момрнта нагрузки { так как в статическом режиме М. М„).
При полном использова 1ии мощности аси1гхронного двигателя в его роторную цепь необходимо подавать нальный неизменный по амплитуде и фазе ток и, следовательно, электрические потери в роторной цепи во всех режимах остаются неизменными,как и угол сдвига фаз между F, р и 1.. Если номинальное значение коэффициента мощности двигателя - cosqi, то при неизменном роторном токе при снижении потребляемой нагрузки мощности Р происходит уменьшение потребляемого статорной обмоткой тока (поскольку в способе управпяют магнитным потоком статора) за счет снижения намагничивающей составляющей I дд первичного тока, что приводит к уменьшению угла cf, и увеличению коэффициента мощности двигателя по мере снижения нагрузки.
Таким образом, предложенньп способ позволяет отказаться от использования электромеханического датчика скорости двигателя, повысить коэффициент мощности электропривода, что приводит к повьппению надежности и КПД. Формула изобретения
Способ управления асинхронным двигателем с фазным ротором, при котором на обмотку статора подают трехфазное переменное напряжение стабильной частоты, в обмотку ротора подают трехфазный переменный ток, отличающийся тем, что, с целью повышения -надежности и КПД, измеряют напряжения, пропоридюналь- ные ЭДС обмотки ротора и магнитноку потоку обмотки статора асинхронного двигателя, сравнивают эти напряжения, формируют амплитуду трехфазного переменного на пряжения пропорционально указанному результируюгцему напряжению сравнения, при этом амплитуду и фазу трехфазного переменного тока в обмотке ротора асинхронного двигателя поддерживают постоянными.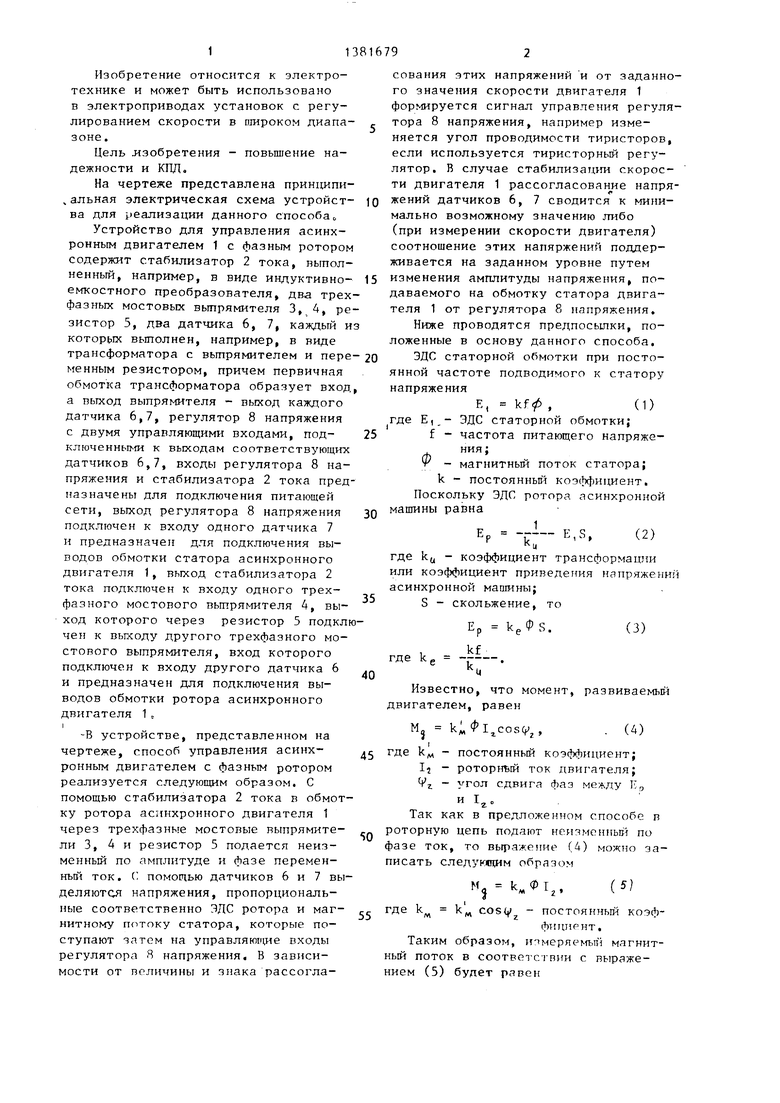

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| Электропривод переменного тока | 1987 |
|
SU1501242A2 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Электропривод переменного тока | 1990 |
|
SU1725360A1 |
| Электропривод переменного тока | 1987 |
|
SU1476590A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1989 |
|
SU1723652A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах установок с регулиро- .ванием скорости в широком диапазоне. Цель изобретения - повышение надежности и КПД. Управление асинхронным двигателем с фазным ротором осуществляется путем изменения амплитуды трехфазного переменного напряжения с помощью регулятора 8 напряжения, подаваемого на обмотку статора асинхронного двигателя 1, и поддержания заданных значений амплитуды и фазы тока в обмотке ротора с помощью стабилизатора 2 тока. Изменение напряжения на выходе регулятора 8 ocynie- ствляется в зависимости от величины и знака рассогласования напряжений с выходов датчиков 6, 7, пропорциональных ЭДС ротора и маш.потоку статора. 1 ил о с (Л
| Оправа интерференционно-поляризационного светофильтра | 1950 |
|
SU100705A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Исаков В.Н | |||
| и др | |||
| Система регулирования частоты вращения и электромагнитного момента асинхронного электромагнитного момента асинхронного электропривода со свойствами источника момента | |||
| - Техническая электродинамика, 1985, № 6, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
