Изобретение относится к технической физике, а более конкретно к испытаниям реактивных двигателей, и может быть использовано в способах и устройствах для измерения тяги для повышения их точности.
Известен газодинамический способ определения тяги реактивных двигателей, включающий измерение параметров газовой струи, площади сопла, и вычисление по ним тяги двигателя. Различные модификации способа используются в патентах США N 2524749, N 2981098, N 3834322; ЕПВ N 0458453. Эти выводы дают косвенное определение тяги, требуют препарирования и усложнение конструкции двигателя, и обладают значительной погрешностью в определении тяги.
Известны аэродинамические методы измерения тяги реактивных двигателей, использующие датчики динамического напора выхлопной струи, позволяющие непосредственно измерять импульс реактивной струи или полностью импульса в точке, сечении реактивной струи.
Такие способы используются в патенте США N 3543574, авт. св. СССР N 1548685, N 1699243. Общим недостатком указанных способов является то, что вводимые в реактивную струю зонды, датчики не дают однозначных результатов в околозвуковых и трансзвуковых диапазонах скоростей реактивной струи в связи с нелинейностью коэффициентов сопротивления, что приводит к снижению точности определения тяги.
Кроме того устройство авт. N 1548685 не позволяет использовать его в полете, что исключает исследование летных характеристик двигателя.
Устройства патент США и авт.св. СССР N 1699243 затруднительно использовать для двухконтурных двигателей.
Ближайшим аналогом изобретения является устройство для измерения силы тяги двигателя (авт. св. СССР N 492782). Устройство использует следующий способ:
в выхлопную струю помещается зонд;
измеряется усилие сопротивления зонда;
по усилию сопротивления зонда определяется тяга двигателя.
Устройство содержит зонд, выполненный в виде стержня, закрепленного шарнирно на корпусе двигателя, При этом один конец стержня помещен в зоне выхлопной струи, а другой конец связан с силоизмерительным устройством, выполненным в виде пружин и винта, связанного с реверсивным двигателем.
Устройство снабжено сложной следящей системой установки зонда-стержня в нулевое положение, а винт связан с устройством определения тяги двигателя, выполненным в виде потенциометра со скользящим контактом и снабженным микроамперметром, проградуированного в единицах тяги двигателя.
Используемый способ позволяет измерить импульс выхлопной струи в месте расположения зонда, на основе которого определяется тяга всего двигателя. Однако используемый способ и устройство обладают рядом недостатков. Так коэффициент сопротивления стержня в около-, трансзвуковых скоростях потока является нелинейным, неоднозначным, зависящим от числа M, что снижает точность измерения импульса тяги.
Само устройство является сложным, громоздким, приводит к значительному увеличению массы конструкции двигателя. Кроме того, устройство требует сложной регулировки, усложнен его монтаж-демонтаж, что затрудняет эксплуатацию двигателя.
Задача изобретения создание такого способа измерения импульса газового потока и устройства для измерения тяги, использующего способ, которые позволяли бы повысить точность измерения тяги в эксплуатационных условиях (в полете и на земле) без усложнения конструкции и эксплуатации двигателя.
Кроме того устройство должно обеспечивать частый монтаж-демонтаж с минимальными затратами, иметь минимальный вес и простую и надежную конструкцию, допускать установку для различных типов двигателей.
Согласно изобретению поставленная цель достигается тем, что в способе измерения скоростного напора газового потока реактивного двигателя, содержащем помещение зонда в газовый поток, измерение усилия сопротивления и определение импульса, измерение усилия сопротивления производят для двух зондов с различными коэффициентами сопротивления, размещенных в газовом потоке вблизи измеряемой зоны, определяют отношение измеренных усилий (параметров, характеризующих сопротивление зондов потоку), по полученному отношению и предварительно определенной зависимости находят число М потока или разницу в коэффициентах аэродинамического сопротивления зондов, после чего определяют скоростной напор.
Кроме того устройство для измерения тяги реактивного двигателя, содержащее первый зонд, установленный в области газового потока и снабженный силоизмерительный устройством, соединенным с первым входом блока определения тяги, снабжено дополнительно вторым зондом, размещенным вблизи первого зонда. При этом первый и второй зонды выполнены с различными по форме поперечными сечениями, а второй зонд снабжен силоизмерительным устройством, подключенным ко второму входу блока определения тяги, выполненному двухканальным.
Более того, каждый из зондов выполнен в виде стержня, жестко закрепленного на двигателе и несущего у закрепленного конца стержня силоизмерительное устройство, выполненное в виде калиброванной балки, снабженной тензорезисторными элементами.
Выполненный в соответствии с изобретением способ позволяет производить измерение импульса на земле и в полете на всех режимах работы двигателя. При этом повышается точность определения импульса за счет однозначного определения сопротивления зондов и исключения необходимости дополнительного определения числа М потока.
Устройство измерения тяги, использующее предлагаемый способ, позволяет повысить точность определения тяги на всех режимах работы двигателя. Устройство просто по конструкции, имеет минимальную массу, легко монтируется-демонтируется с минимальными затратами. Кроме того оно может быть легко установлено на любом типе двигателя и на его частях: выхлопном сопле, на сопле второго контура, во входном устройстве.
Более того устройство не требует сложной доработки конструкции двигателя, может эксплуатироваться с минимальными затратами в течение всего ресурса двигателя для исследования состояния двигателя.
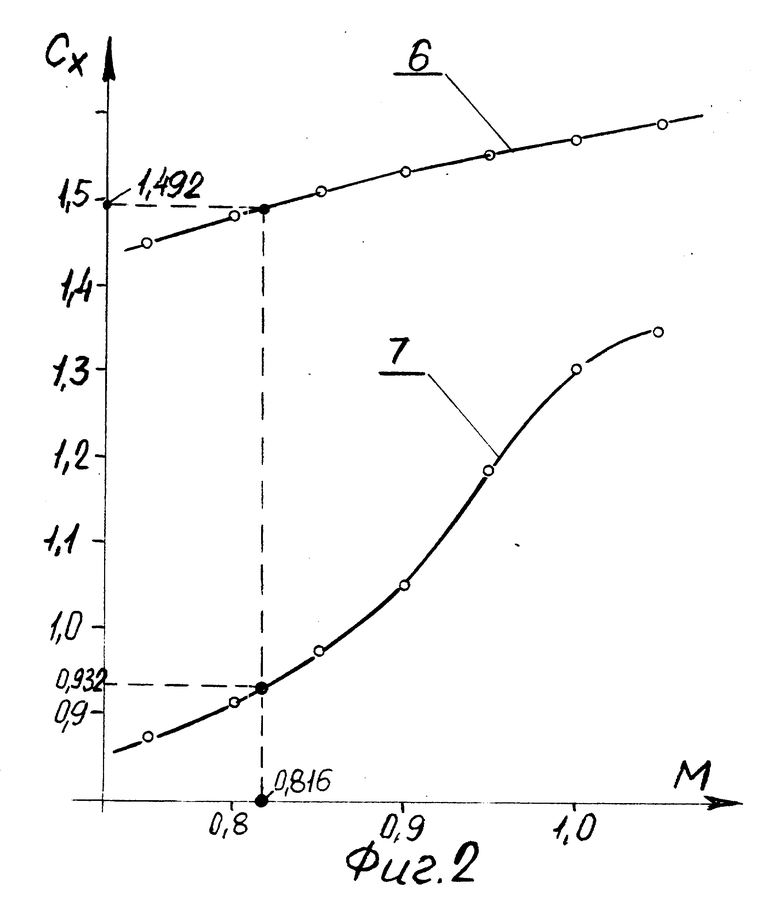
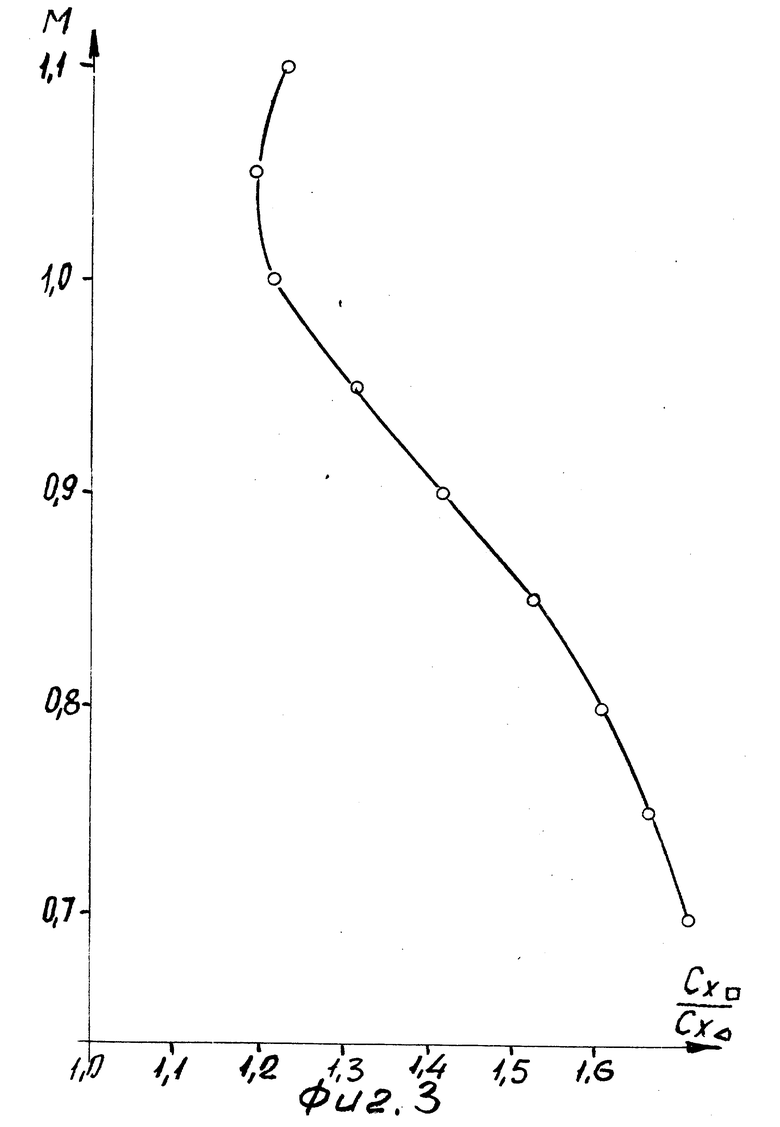
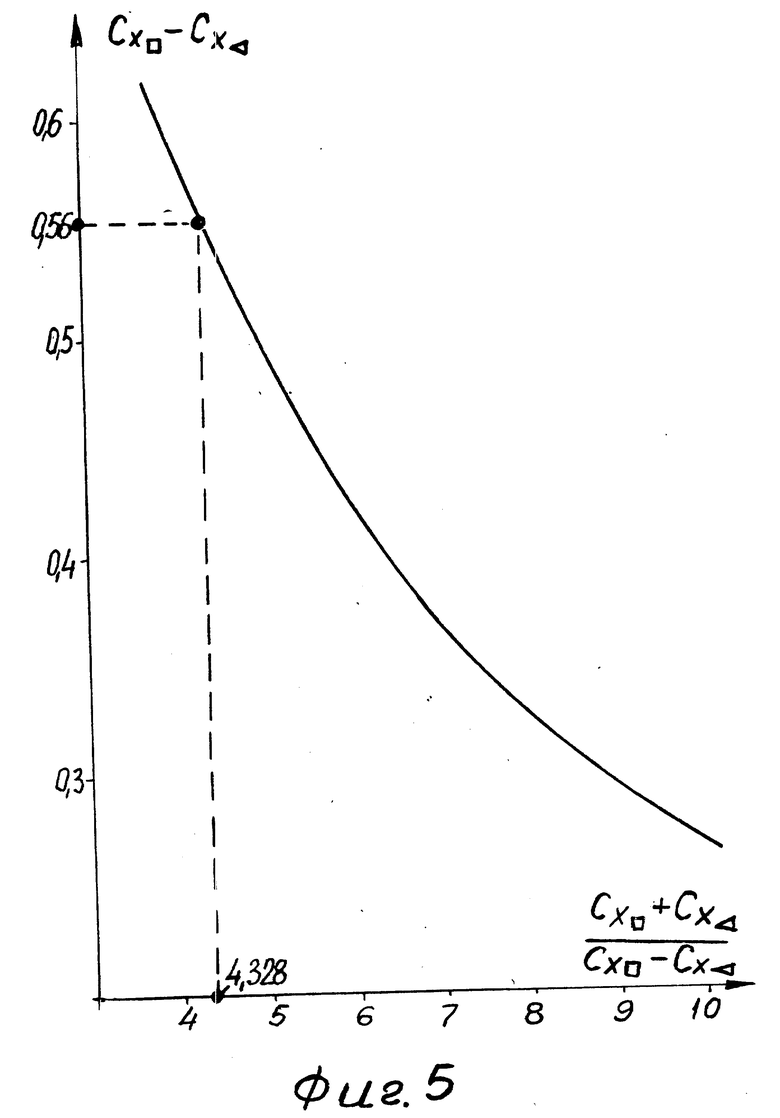
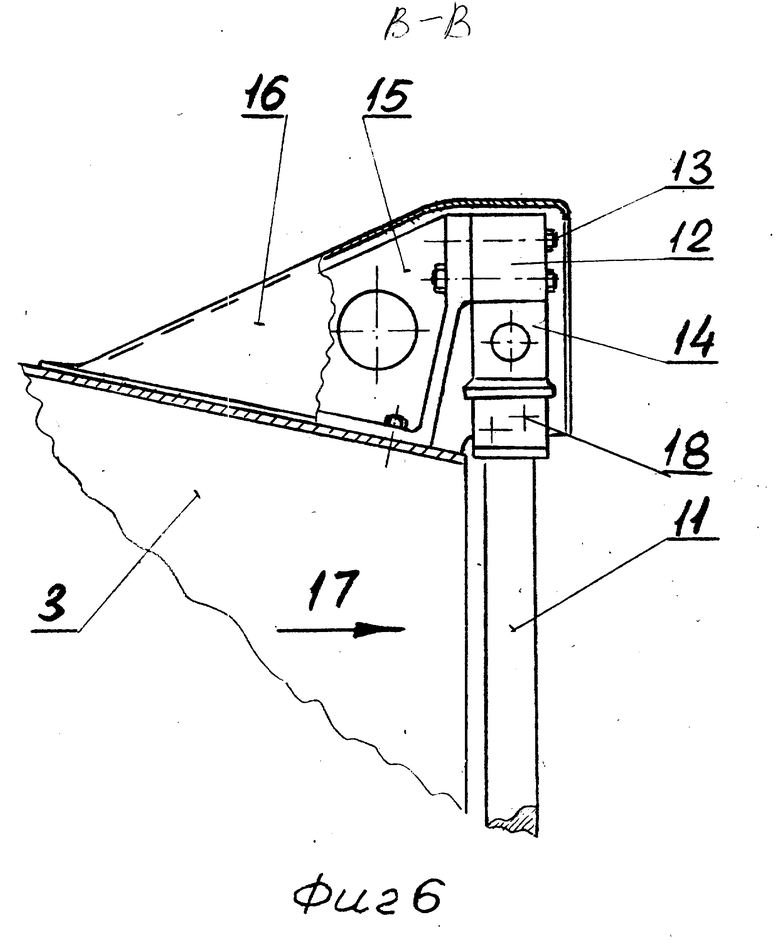
На фиг. 1 показана схема размещения зондов для измерения тяги двигателя согласно изобретения; на фиг. 2 зависимость коэффициента сопротивления зонда от числа М потока; на фиг. 3 зависимость от числа М потока отношения коэффициентов сопротивления зондов с прямоугольным и треугольным сечениями; на фиг. 4 зависимость от числа М потока отношения суммы коэффициентов сопротивления зондов с прямоугольным и треугольным сечениями к разности этих же коэффициентов; на фиг. 5 зависимость разности коэффициентов сопротивления зондов с прямоугольным и треугольным сечениями от параметра, равного отношению суммы и разности этих же коэффициентов; на фиг. 6 узел установки зонда на двигателе (разрез В-В фиг. 1).
Способ определения скоростного напора реализуется следующим образом. В область прохождения газового потока помещаются два зонда, располагающиеся перпендикулярно потоку. При этом зонды размещаются в непосредственной близости друг от друга и по обе стороны от измеряемого сечения (измеряемой зоны), по всей его длине. Применительно к случаю измерения скоростного напора газовых потоков реактивного двигателя схема установки зондов представлена на фиг. 1.
Установка из двух зондов 1 может быть размещена на входном устройстве 2, выхлопном сопле 3, на выходе второго контура 4 двухконтурного турбореактивного двигателя 5.
Под воздействием газового потока каждый зонд испытывает усилие Pi пропорциональное газодинамическому скоростному напору  (где ρ плотность потока, V скорость потока), коэффициенту аэродинамического сопротивления
(где ρ плотность потока, V скорость потока), коэффициенту аэродинамического сопротивления  и омываемой площади зонда Si.
и омываемой площади зонда Si.
При этом зонды, входящие в каждую установку, выполнены с разными коэффициентами аэродинамического сопротивления, поэтому при воздействии потока зонды будут испытывать разные усилия сопротивления, соответственно P1 и P2, т.е.
где F1 и F2 площадь миделевого сечения зондов; коэффициенты аэродинамического сопротивления зондов.
коэффициенты аэродинамического сопротивления зондов.
Для каждого зонда методом аэродинамических продувок предварительно определяются характеристики:
где M число Маха, равное отношению скорости потока к скорости звука.
По полученным в результате аэродинамических продувок  и
и  формируются параметры, характеризующие отношение усилий, испытываемых в потоке. В качестве такого параметра может быть использовано отношение коэффициентов аэродинамического сопротивления двух зондов.
формируются параметры, характеризующие отношение усилий, испытываемых в потоке. В качестве такого параметра может быть использовано отношение коэффициентов аэродинамического сопротивления двух зондов.
Так при равенстве F1 и F2 отношение усилий испытываемых зондами равно
Таким образом для взятых двух датчиков по результатам измерений возможно построение характеристики  f (M) для требуемого диапазона скоростей потока. Для двух зондов, имеющих поперечные сечения в виде прямоугольника и треугольника такие характеристики представлены на фиг. 2 и 3, где кривые 6,7 представляют собой функции Cx f (M) для зондов с прямоугольным и треугольным с углом 3o при вершине поперечными сечениями соответственно, а кривая 8 представляет собой кривую
f (M) для требуемого диапазона скоростей потока. Для двух зондов, имеющих поперечные сечения в виде прямоугольника и треугольника такие характеристики представлены на фиг. 2 и 3, где кривые 6,7 представляют собой функции Cx f (M) для зондов с прямоугольным и треугольным с углом 3o при вершине поперечными сечениями соответственно, а кривая 8 представляет собой кривую
где Cx□ коэффициент сопротивления прямоугольного в сечении зонда; коэффициент сопротивления треугольного в сечении зонда с углом при вершине 30o.
коэффициент сопротивления треугольного в сечении зонда с углом при вершине 30o.
В качестве параметра, характеризующего отношение усилий воспринимаемых зондами, может быть использовано отношение
которое является функцией числа М или разницы коэффициентов  построенные также по результатам тарировочных аэродинамических подувок зондов.
построенные также по результатам тарировочных аэродинамических подувок зондов.
Для тех же зондов кривая 9 представляет зависимость (фиг. 4),
(фиг. 4),
а кривая 10 показывает зависимость (фиг. 5).
(фиг. 5).
Определение скоростного напора через число М.
1. В каждом цикле измеряют усилия, воспринимаемые зондами P1i и P2i.
2. По измеренным усилиям определяют параметр, характеризующий отношение усилий на зондах:
а) отношение коэффициентов сопротивления
б) отношение суммы коэффициентов к их разнице
3. По значениям  или
или  определяют число Mi потока из зависимостей
определяют число Mi потока из зависимостей
По найденному значению Mi из графиков Cx f(M) находят  после чего определяем скоростной напор на каждом зонде
после чего определяем скоростной напор на каждом зонде
Усредненное значение, соответствующее скоростному напору в измеряемой зоне (между зондами) определяются по формуле
Определение скоростного напора через разницу в коэффициентах сопротивления.
1. Измеряют усилия сопротивления каждого зонда в каждом цикле: P1i и P2i.
2. Определяют параметры
3. По предварительно полученным зависимостям находят
или
4. Определяют скоростной напор по формуле
Найденный скоростной напор может быть использован для определения тяги реактивного двигателя.
На расчетном режиме сопла (Pc Pн, где Pc - давление на срезе сопла, а Pн атмосферное давление).
Тяга реактивного двигателя определяется по формуле
R = Iвых-Iвх= ρcv
где Iвх импульс на входе в двигатель;
Iвых выходной импульс сопла;
ρc, ρвх плотность потока газа и воздуха соответственно;
Vc скорость истечения газа на срез выходного сопла;
Vвх скорость на входе в двигатель;
Fc, Fвх площадь выходного сопла и входа соответственно.
При наземных условиях Vвх= 0 и выражение для определения тяги принимает вид
R = Iвых= ρc•v
Таким образом при наличии значения скоростного потока и известных геометрических параметрах Fc и Fвх может быть определена тяга двигателя. При этом предполагается равномерность газового потока по сечению сопла.
При наличии окружной неравномерности газового потока (радиальная неравномерность учитывается длиной зонда) измерение скоростного напора производят для нескольких зон сечения выхлопной струи, а значение скоростного напора определения тяги двигателя берется как среднее значение из всех измеренных. Необходимо отметить, что неравномерность потока газа вдоль самой измеряемой зоны учитывается тем, что усилие сопротивления зонда представляет собой нагрузку на всю длину зонда, т.е. является интегральной характеристикой.
Пример определения тяги двигателя.
Производилось измерение тяги двухконтурного турбореактивного двигателя с общим соплом с диаметром Dc 1,4135 м и площадью Fc 1,5685 м2.
Измерение производилось на номинальном режиме работы двигателя.
Предварительно было выявлено измерение тяги данного двигателя на специальном тягоизмерительном стенде, которое дало следующие результаты:
число маха потока на срезе сопла составило M 0,8163;
скоростной напор ρcv
тяга двигателя R 14412 кг.
После чего было выполнено измерения тяги двигателя способом и устройством согласно изобретению.
Скоростной напор измеряется двумя зондами: прямоугольного и треугольного с углом 30o при вершине сечений с одинаковой площадью.
F1 F2 0,0212 м2 (l 1,4135 м, S 0,075 м2, где l длина части погруженной в поток, а S площадь зонда).
Замеры усилия сопротивления зонда дали результат
Формируем параметры, характеризующие отношение усилий
По графику (фиг. 4)
определяем М 0,816.
По графику (фиг. 2) определяем, для М 0,816
Тогда скоростные напоры для каждого датчика (прямоугольного и треугольного сечения соответственно)
Усредненный скоростной напор в измеряемой зоне (между зондами)
ρv
Устройство для определения тяги реактивного двигателя, реализующее вышеприведенный способ измерения скоростного напора, состоит из по меньшей мере одной пары зондов (первого и второго), устанавливаемых на выходном сопле (и входном устройстве для летных условий) двигателя, и измерительного прибора.
Каждый из зондов (фиг. 6) выполнен в виде прямолинейного стержня 11, закрепленного жестко на сопле 3 двигателя. Стержень 11 на закрепленном своем конце несет силоизмерительное устройство, выполненное в виде калиброванной балки 14, снабженной тензорезисторными элементами, подключенными к измерительному прибору (на чертеже не показаны). Для обеспечения измерения только перерезывающей силы на калиброванной балке для установки тензорезисторов выбрана зона примыкающая к нейтральной оси. При этом тензорезисторные элементы выполненные из фольги с измерительной решеткой, имеющей наклон в 45o, что также направлено на измерение только касательных напряжений. Тензорезисторы соединены в мостовую схему, в которой предусмотрены регулировки разбаланса и температурной компенсации выходного сигнала (на чертеже не показано).
Калиброванная балка 14 выполнена заодно с кронштейном 12, служащим для закрепления зонда на кронштейне 15, установленном на поверхности сопла 3. Весь узел установки зонда на сопле 3 закрыт съемным обтекателем 16.
Стержень 11 выполняется с определенным поперечным сечением. При этом первый и второй зонды должны быть выполнены со стержнями, имеющими различные поперечные сечения по форме размерами.
Стержни могут быть выполнены с поперечным сечением прямоугольным, треугольным, круглым, ромбовидным и т.д.
Так, если первый зонд имеет стержень прямоугольного сечения, то второй зонд может быть оснащен с треугольным поперечным сечением
Важно, чтобы в одной паре зондов были стержни, создающие разные коэффициенты аэродинамического сопротивления по величине и по форме в зависимости от скорости потока.
Конструктивные размеры жесткого стержня 11 определяются условием максимального диаметрального перекрытия входного или выходного устройства. При этом, зонды устанавливаются попарно вблизи измеряемой зоны, но на некотором расстоянии друг от друга, исключающем их взаимное влияние. Это расстояние выбирается в зависимости от геометрических параметров стержней и параметров измеряемого потока.
Сами стержни обычно выполняются из тугоплавких металлов, например, жаростойких стальных сплавов.
В отдельных случаях стержни могут выполняться пустотелыми с принудительным охлаждением.
Для обеспечения легкосъемности корпус 12 крепится к кронштейну 15 болтами 13, создающими жесткое закрепление зонда на сопле двигателя. Кроме того, корпус снабжен посадочным местом 18 с элементами крепления для установки стержня 11, что позволяет производить смену стержней.
Для обеспечения требуемой точности измерения тяги двигателя устройство может быть снабжено несколькими парами зондов, что определяется конструктивными особенностями двигателя (с общим реактивным соплом, разделенными соплами, сопло с центральным телом) и степенью окружной неравномерности газового потока.
Измерительный прибор состоит из блока определения тяги, выход которого связан с блоком индикации, а вход соединен линией связи с датчиками усилия сопротивления зондов.
Датчиками усилия сопротивления являются силоизмерительные устройства. При этом силоизмерительные устройства первого и второго зондов подключены ко входу блока определения тяги, выполненному двухканальным. При необходимости измерения скоростного напора в нескольких сечениях или на разных частях двигателя (например, на выходном сопле и входном устройстве) блок определения тяги может быть выполнен со многими входами, каждый из которых выполнен двухканальным.
Блок определения тяги представляет собой совокупность программируемых устройств различного назначения, функционирование которых происходит под управлением программы, размещенной в постоянном запоминающем устройстве ПЗУ
В блоке можно выделить части:
аналоговый блок, в состав которого входят устройства, обеспечивающие напряжение для питания тензорезисторных элементов, нормирование сигналов датчиков усилий, их коммутацию и усиление;
вычислительный блок, в состав которого входят устройства, обеспечивающие выполнение управляющих и вычислительных операций, преобразование аналоговых сигналов в цифровой код, ввод-вывод данных с клавиатуры и на индикацию, сопряжение с внешним устройством по стандарту ИРПС и ИРПР;
блок питания, вырабатывающий напряжение питания всех устройств.
Управление работой всех устройств осуществляется микро-ЭВМ по приборной шине связи, состоящей из трех шин: шины данных, шины адреса и шины управления. В состав микро-ЭВМ входит центральный процессор (ЦП) с необходимыми схемами управления, постоянное запоминающее устройство (ПЗУ) и оперативное запоминающее устройство (ОЗУ).
Индикация служебной информации и результатов измерения осуществляется с помощью блока индикации, который может быть выполнен, например, в виде пяти разрядного и трех разрядного табло и позиционных индикаторов.
Управление прибором и ввод служебной информации осуществляется кнопочными устройствами и цифровой клавиатурой.
Работает прибор следующим образом.
При работе двигателя газовый поток 17 (фиг. 6) оказывает давление на стержень 11. Стержень 11 воспринимает нагрузку по всей своей длине, передавая интегрированное усилие на калиброванную балку. Тензорезисторное устройство вырабатывает сигнал, пропорциональный перерезывающей силе на балке, равной усилию сопротивления стержня 11 потоку 17.
При подаче напряжения на прибор появляется импульс начальной установки. Процессорное устройство после конца импульса начальной установки выставляет на шине начальный адрес, читает первую команду, расположенную по этому адресу, и начинает выполнять действия в соответствии с кодом команды. После выполнения первой команды процессорное устройство читает и выполняет вторую команду, и далее последовательно выполняет всю программу, помещенную в ПЗУ прибора. Алгоритм и программа реализуют выполнение вышеприведенных математических зависимостей.
Результаты измерений отражаются в блоке индикации.
Созданное с использованием изобретения устройство для измерения тяги ГТД имеет следующие преимущества:
простота и надежность в работе;
возможность измерения тяги двигателя с высокой точностью на земле, в полете;
удобство в эксплуатации за счет простоты, легкосъемности устройства, отсутствия необходимости препарирования двигателя;
возможность измерения тяги на любых типах двигателей: газотурбинных, двухконтурных;
малая масса устройства.
Так для указанного примера комплект из двух зондов и измерительного прибора с линиями связи имеет массу ≈ 16 кг.
Статическая градуировка измерительного канала устройства показала, что погрешность измерения усилия в диапазонах: 0,01 0,12 Pн; 0,13 0,24 Pн; 0,25 0,5 Pн; 0,5 1,0 Pн (где Pн- номинальная тяга двигателя) составляет не более 0,1% от верхнего предела в каждом диапазоне.
Использование устройства позволяет проводить периодические измерения тяги на любых эксплуатируемых двигателях, следить за техническим состоянием двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ СОПЛА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ В ПОЛЁТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2230302C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЯГИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ В ПОЛЕТЕ | 2006 |
|
RU2327961C1 |
| СПОСОБ ИСПЫТАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2162593C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2582492C1 |
| ПЛОСКОЕ РЕАКТИВНОЕ СОПЛО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1990 |
|
RU2042852C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ В ПОЛЕТЕ СУММАРНОЙ ТЯГИ ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2364846C1 |
| ВОЗДУХОЗАБОРНИК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2140378C1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ПРИ ИЗМЕНЕНИИ РЕЖИМА РАБОТЫ ДВИГАТЕЛЕЙ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601367C1 |

Использование: для измерения тяги реактивных двигателей различных типов. Сущность изобретения: в способе измерения скоростного напора газового потока усилия сопротивления измеряют двумя зондами с различными коэффициентами аэродинамического сопротивления, размещенными в газовом потоке вблизи измеряемой зоны и определяют параметр, характеризующий отношение измеренных зондами усилий, по которому с учетом числа Маха потока или разницы коэффициентов аэродинамического сопротивления зондов определяют скоростной напор газового потока. Каждый из зондов может быть выполнен в виде жестко закрепленного на двигателе стержня, на закрепленном конце которого размещено силоизмерительное устройство, выполненное в виде калиброванной балки с тензорезисторами. 2 с.п. ф-лы, 6 ил.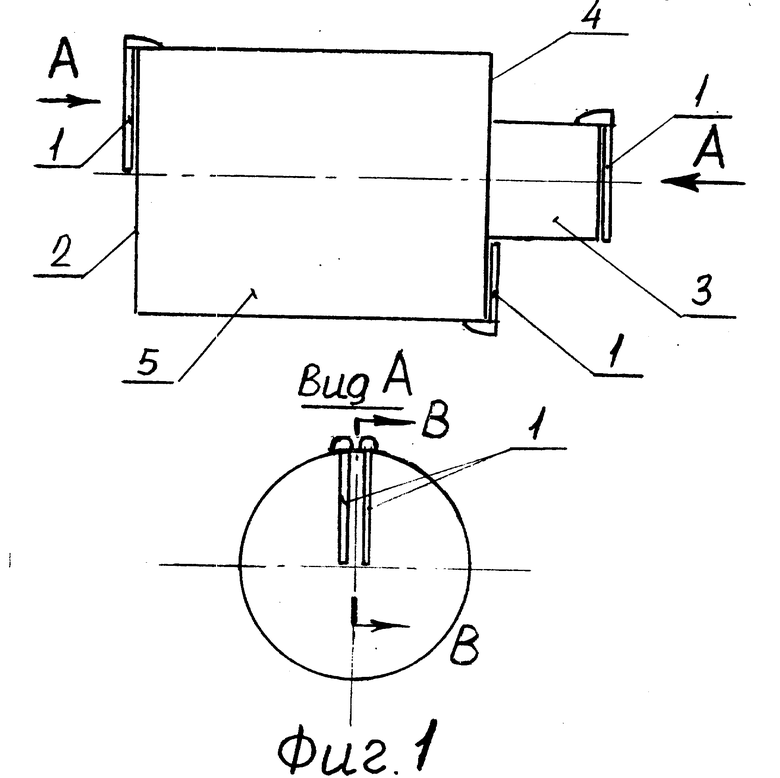
| Устройство для диагностирования реактивной струи | 1987 |
|
SU1548685A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения силы тяги двигателя | 1974 |
|
SU492762A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
