Изобретение относится к испытательной технике и может быть использовано для измерения эффективной тяги двигателей самолета, которая является равнодействующей сил давления и трения, приложенных ко всем поверхностям силовой установки как со стороны газового потока, протекающего внутри двигателя, так и со стороны потока воздуха, обтекающего силовую установку снаружи.
Известны способ измерения скоростного напора газового потока и устройство для измерения тяги реактивного двигателя, описанные в патенте RU 2100788, МПК G01L 5/13, G01M 15/00, опубликованном 27.12.1997 г., принятом нами за прототип.
Описанное в патенте устройство предназначено для измерения тяги реактивного двигателя путем измерения скоростного напора газового потока, который измеряют двумя зондами с различными коэффициентами аэродинамического сопротивления, размещенными в газовом потоке вблизи измеряемой зоны, и определяют параметр, характеризующий отношение измеренных зондами усилий, по которому с учетом числа Маха потока или разницы коэффициентов аэродинамического сопротивления зондов определяют скоростной напор газового потока. Каждый из зондов может быть выполнен в виде жестко закрепленного на двигателе стержня, на закрепленном конце которого размещено силоизмерительное устройство, выполненное в виде калиброванной балки с тензорезисторами.
Однако известные способ и устройство обладают рядом недостатков. Так, коэффициент сопротивления стержня на околозвуковых и трансзвуковых скоростях потока является нелинейным, неоднозначным, зависящим от числа М, что снижает точность измерения импульса тяги. Устройство является сложным, громоздким, приводит к увеличению габаритов двигателя и изменению его конструкции.
Целью изобретения является создание устройства определения эффективной тяги двигателей самолета на различных режимах эксплуатации, позволяющего повысить точность измерения тяги без усложнения конструкции и процесса эксплуатации двигателя, при уменьшении объема трудозатрат.
Поставленная цель достигается за счет того, что в устройство определения тяги двигателей самолета, содержащее измеритель скоростного напора воздушного потока, дополнительно введены датчик угла атаки, датчик перегрузки, задатчик размерности матрицы, три блока формирования матриц, блок вычитания матриц, блок транспонирования матриц, последовательно соединенные первый блок умножения матриц, блок обращения матрицы, второй блок умножения матриц и третий блок умножения матриц, причем выход измерителя скоростного напора воздушного потока подключен к первому входу первого блока формирования матрицы, первый выход которого подключен к первому входу первого блока умножения матриц, второй выход подключен к входу блока транспонирования матриц, первый и второй выходы которого подключены соответственно ко второму входу первого блока умножения матриц и к входу второго блока умножения матриц, выход датчика угла атаки подключен ко второму и первому входам первого и второго блоков формирования матриц соответственно, выход датчика перегрузки подключен к первому входу третьего блока формирования матрицы, при этом третьи и четвертые входы блоков формирования матриц являются входами для сигналов, соответствующих константам, характеризующим конструкцию и аэродинамику самолета, выход задатчика размерности матрицы подключен к пятому входу первого блока формирования матрицы и ко вторым входам второго и третьего блоков формирования матрицы, выходы которых подключены к соответствующим входам блока вычитания матриц, выход которого подключен ко второму входу третьего блока умножения, выход которого является выходом устройства.
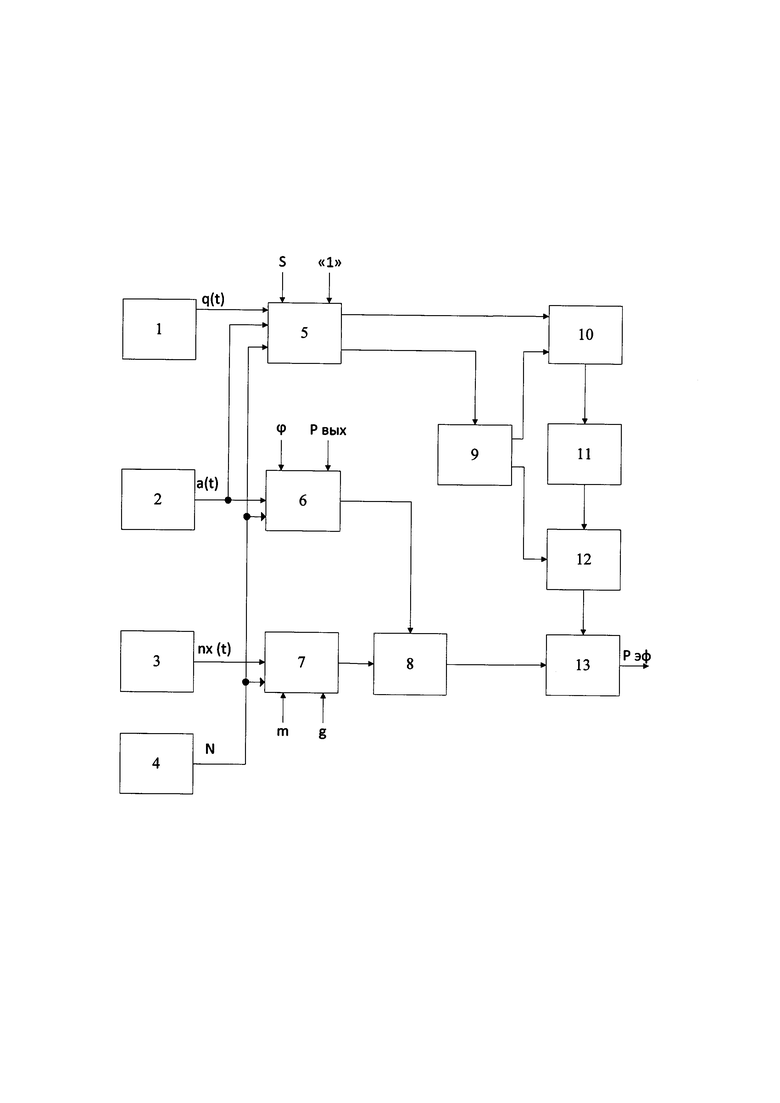
Сущность изобретения поясняется чертежом, на котором представлена структурная схема заявляемого устройства.
Предлагаемое устройство определения эффективной тяги двигателя самолета содержит измеритель 1 скоростного напора воздушного потока, датчик 2 угла атаки, датчик 3 перегрузки, задатчик 4 размера матриц, первый, второй и третий блоки 5, 6 и 7 формирования матриц X, А и В соответственно, блок 8 вычитания матриц, блок 9 транспонирования матрицы, последовательно соединенные первый блок 10 умножения матриц, блок 11 обращения матрицы, второй и третий блоки умножения матриц 12 и 13 соответственно.
Искомое значение эффективной тяги двигателя получается в результате решения задачи параметрической идентификации. Наблюдаемость достигается за счет выполнения специального тестового маневра, обеспечивающего малые приращения скорости полета при постоянном режиме работы двигателя. При этом сила аэродинамического сопротивления пропорциональна скоростному напору, то есть квадрату скорости, тяга двигателя принимается постоянной (в силу малой величины приращений скорости). Это позволяет получить установившееся значение эффективной тяги, поскольку квадратичная функция и константа линейно независимы.
Главная особенность предлагаемого подхода заключается в том, что для получения оценок тяги и сопротивления используются только измерения основных полетных параметров, таких как продольная перегрузка, воздушная скорость, высота и угол атаки.
Рассмотрим следующую модель объекта. Сила аэродинамического сопротивления направлена вдоль оси Oxe
где 
S - эквивалентная площадь крыла, м2;
ρH - плотность воздуха на высоте полета H, кг/м3;
Vист - истинная воздушная скорость.
Аэродинамические коэффициенты в связанной системе координат определяются выражением
где α - угол атаки, градус.
Значения аэродинамических коэффициентов и геометрических параметров зависят от типа самолета.
Учтем, что входной импульс Рвх направлен вдоль связанной оси, а выходной Рвых - вдоль оси двигателя, которая отклонена относительно связанной оси на угол установки двигателя φдв.
Проекция аэродинамических сил входного и выходного импульсов на продольную ось определяется выражением

Проекция перегрузки на ось X

Окончательные выражения для проекции перегрузки на продольную ось:

Учитывая, что cos(φдв+α)=cosφдвcosα-sinφдвsinα и раскладывая cosα и sinα в ряд относительно α0=0, получим 

Последние два слагаемых целесообразно учесть в явном виде, используя априорную информацию о Рвых. Объединим составляющие тяги

Тогда выражение (1) принимает вид:


слагаемое, зависящее от априорного значения выходного импульса Pвых0.
Расчетами установлено, что если погрешность априорного значения параметра не превышает 10%, ее влияние на погрешность остальных параметров не превышает 0,25%.
Вектор определяемых параметров
Идентификация выполняется по методу наименьших квадратов (МНК) на основе уравнения (2).
С учетом того, что бортовые измерения выполняются в дискретные моменты времени

где N - число измерений на участке идентификации.
Для нахождения оценок согласно МНК формируются вектор Y размерности N и матрица X размерности N×N:


Тогда вектор определяемых параметров находится следующим выражением

Анализ выражений (4)-(7) показывает, что для обеспечения наблюдаемости необходимо изменять скорость полета, однако изменения относительно установившегося значения должны быть малы (точное значение зависит от типа двигателя и режима полета), чтобы выполнялось условие постоянства силы тяги двигателей на интервале обработки. Скорость изменяется при постоянном режиме работы двигателей за счет последовательного выполнения пикирований и кабрирований с малыми углами наклона траектории. Изменения угла атаки при переходных процессах достаточны для обеспечения наблюдаемости всей системы, однако целесообразно включить дополнительно тестовые движения ручкой управления самолетом (РУС) в канале тангажа.
В соответствии с общим подходом к оцениванию характеристик самолетов в летных испытаниях указанный маневр необходимо выполнить во всем эксплуатационном диапазоне высот и скоростей полета.
На высоте Н=3000 м и скорости полета, соответствующей М=0,4 (Vпр=410 км/ч), осуществляют балансирование самолета в прямолинейном горизонтальном полете (ПГП) с постоянной скоростью, запоминают при этом угол атаки α0. Выполнить движение РУС по тангажу "от себя" и "на себя" длительностью 2…2,5 с так, чтобы приращения угла атаки составили ±(1…2) градуса. Восстановить ПГП на той же высоте и с тем же числом М и углом атаки. Не изменяя режим работы двигателей, перевести самолет в пикирование с малым приращением угла тангажа так, чтобы приборная скорость полета постепенно увеличилась на 10 км/ч до 420 км/ч (число М увеличилось на 0,01 до М=0,41). Затем перевести самолет в режиме прямолинейного набора высоты так, чтобы скорость с тем же темпом уменьшилась на 10 км/ч от исходного значения, то есть до 400 км/ч (число М уменьшилось на 0,01 от исходного до М=0,39). Далее снова перевести самолет в пикирование и увеличить скорость с тем же темпом до исходного значения 410 км/ч (М=0,4). Восстановить ПГП с М=0,4 (Vпр=410 км/ч) на исходной высоте в пределах Н0±250 м. Выполнить движение РУС по тангажу "от себя" и "на себя" длительностью 2…2,5 с так, чтобы приращения угла атаки составили ±(1…2) градуса.
При выполнении режима угол атаки выдерживать в диапазоне α0±(1…2)° при переводах в пикирование и кабрирование допускается превышение этого ограничения.
Таким образом, требуется при постоянном режиме работы двигателя выполнить плавное колебание по приборной скорости ±10 км/ч (dM=±0,01) за счет малых изменений угла наклона траектории. Повторить режим.
Выполнить аналогичный режим, создавая приращения по приборной скорости±15 км/час (dM=±0, 015). Повторить режим.
Устройство определения эффективной тяги двигателей работает следующим образом: по измеренным сигналам датчика 2 угла атаки, используя сигнал с задатчика 4 размера матрицы и константы φ и Рвых0 в блоке 6 формирования матрицы, формируется матрица А, элементы матрицы определяются согласно выражению (3).
Матрица В формируется в блоке 7 формирования матрицы по измеренным сигналам датчика 3 перегрузки, используя сигналы задатчика 4 размера матрицы, констант m и g, элементы которой определяются левой частью выражения (2). В блоке 8 вычитания матриц определяется разность матриц А и В.
Полученная в результате матрица Y является наблюдением для определения оценки эффективной тяги согласно выражению (5).
Матрица X формируется в блоке 5 формирования матрицы по измеренным сигналам датчика 2 угла атаки, используя константы S и "1", сигнал измерителя 1 скоростного напора воздушного потока q(t) и сигнал задатчика 4 размера матрицы согласно выражению (6). В первом блоке 10 умножения матриц, матрица X умножается на свое же значение, транспонированное в блоке 9 транспонирования матрицы. Полученная матрица (ХТХ) в блоке 11 обращения матрицы обращается в (ХТХ)-1 и во втором блоке 12 умножения матриц умножается на транспонированную матрицу ХT. Полученная матрица в третьем блоке 13 умножения матриц умножается на матрицу Y с выхода блока 8 вычитания матриц, согласно выражению (7).
Таким образом, на выходе устройства получаем значения вектора а, который содержит искомую величину Рэф.
Техническим результатом является возможность определения силы тяги реактивного двигателя самолетов путем использования измеренных значений параметров полета самолета и априорных значений констант, характеризующих параметры летательного аппарата, таких как эквивалентная площадь крыла самолета S, угол отклонения оси двигателя от продольной оси самолета φдв, выходной импульс двигателя Рвых0, ускорение свободного падения g, массы самолета m. Значения констант определяются при продувках полномасштабной модели воздушного судна в аэродинамических трубах и путем взвешиваний и юстировки при изготовлении самолета.
Заявляемое устройство является простым в реализации и может быть использовано на всех типах самолетов, независимо от используемого двигателя. В качестве датчиков перегрузки выбираются имеющиеся на борту акселерометры БИНС, при этом элементы операций с матрицами могут быть реализованы на стандартных элементах вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ПРИ ИЗМЕНЕНИИ РЕЖИМА РАБОТЫ ДВИГАТЕЛЕЙ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601367C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1829279A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2579796C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ В ПОЛЕТЕ СУММАРНОЙ ТЯГИ ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2364846C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ САМОЛЕТА | 1988 |
|
RU2041136C1 |
Изобретение относится к испытательной технике и может быть использовано для измерения эффективной тяги двигателей самолета. Устройство содержит измеритель скоростного напора воздушного потока, датчик угла атаки, датчик перегрузки, задатчик размера матриц, три блока формирования матриц, блок вычитания матриц, блок транспонирования матрицы, блок обращения матрицы, три блока умножения матриц, соединенных между собой определенным образом. Технический результат заключается в повышении точности измерений, упрощении конструкции. 1 ил.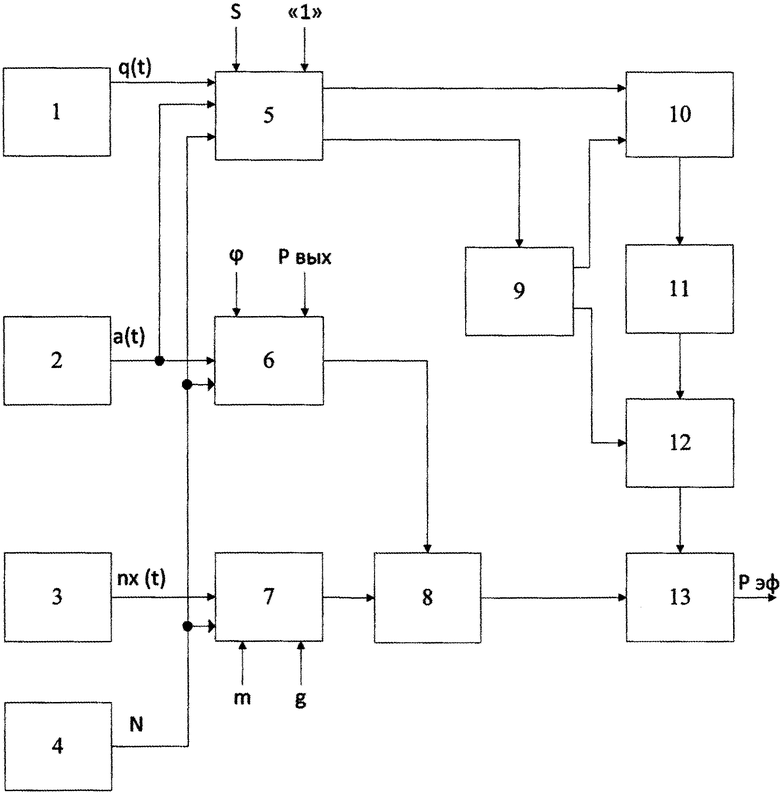
Устройство определения тяги двигателей самолета, содержащее измеритель скоростного напора воздушного потока, отличающееся тем, что в него дополнительно введены датчик угла атаки, датчик перегрузки, задатчик размерности матрицы, три блока формирования матриц, блок вычитания матриц, блок транспонирования матриц, последовательно соединенные первый блок умножения матриц, блок обращения матрицы, второй блок умножения матриц и третий блок умножения матриц, причем выход измерителя скоростного напора воздушного потока подключен к первому входу первого блока формирования матрицы, первый выход которого подключен к первому входу первого блока умножения матриц, второй выход подключен к входу блока транспонирования матриц, первый и второй выходы которого подключены соответственно ко второму входу первого блока умножения матриц и к входу второго блока умножения матриц, выход датчика угла атаки подключен ко второму и первому входам первого и второго блоков формирования матриц соответственно, выход датчика перегрузки подключен к первому входу третьего блока формирования матрицы, при этом третьи и четвертые входы блоков формирования матриц являются входами для сигналов, соответствующих константам, характеризующим конструкцию и аэродинамику самолета, выход задатчика размерности матрицы подключен к пятому входу первого блока формирования матрицы и ко вторым входам второго и третьего блоков формирования матрицы, выходы которых подключены к соответствующим входам блока вычитания матриц, выход которого подключен ко второму входу третьего блока умножения, выход которого является выходом устройства.
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТНОГО НАПОРА ГАЗОВОГО ПОТОКА И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 1996 |
|
RU2100788C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ В ПОЛЕТЕ СУММАРНОЙ ТЯГИ ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2364846C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1829279A1 |

