Область техники
Изобретение относится к технической физике, а именно к способам и устройствам для измерения суммарной тяги двигателей летательных аппаратов на основе измерений параметров в полете, сбора информации, ее обработки с помощью электронно-вычислительных машин (ЭВМ) без введения специальных систем или доработок штатных систем.
Уровень техники
Известен способ измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) непилотируемой гиперзвуковой летающей лаборатории (ГЛЛ), патент US №2242736 от 20 декабря 2004 г.
В данном способе тяга двигателя определяется по приращению продольного ускорения (вдоль оси оX), создаваемого за счет действия силы тяги в полете. Для определения тяги двигателя производится разделение сил аэродинамического сопротивления вдоль продольной оси ГЛЛ, земного тяготения и тяги двигателя. С этой целью производится выключение и включение подачи топлива в камеру сгорания в короткие рядом стоящие промежутки времени t1 и t2, которые не превышают 1 сек. Силу тяги двигателя определяют по формуле:
RДВ=mлл·ωR,
где mлл - масса ГЛЛ,
ωR - ускорение ГЛЛ при действии силы тяги.
Ускорение ГЛЛ вычисляют по формуле:
ωR=(nxt1-nxt2)·g,
где nxt1 и nxt2 - значения продольных перегрузок в моменты времени t1 и t2.
Недостатком этого способа является то, что при выключении и включении двигателя нарушается стационарный режим работы двигателя и полета ГЛЛ, в показаниях акселерометра присутствует составляющая перегрузки от силы лобового сопротивления, которая может быть достаточно велика при больших скоростных напорах. Это приводит к необходимости выбирать акселерометр с большим диапазоном измерений, что приведет к дополнительной динамической погрешности, в особенности при определении малой силы тяги. Кроме того, в случае летных испытаний ГЛЛ с большим аэродинамическим качеством выключение и включение двигателя приведет к дополнительным колебаниям ГЛЛ в продольной плоскости (по углу атаки). По показаниям одного такого акселерометра нельзя судить, по какой причине произошло изменение перегрузки: или колебаний угла атаки, или изменений силы тяги двигателя. При повторном выключении-включении двигателя задний фронт предыдущего импульса, т.е. импульса последействия, может быть достаточно продолжительным, что внесет дополнительную погрешность в величину определяемой силы тяги, т.к. импульс тяги и, соответственно, импульс перегрузки при повторном включении будет отсчитываться от остаточного уровня предыдущего импульса, что снижает точность измерений силы тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя гиперзвуковой летающей лаборатории, в особенности ГЛЛ с большим аэродинамическим качеством.
Известен способ определения тяги сопла газотурбинного двигателя в полете и устройство для его осуществления (патент РФ 223 0302, G011 5/13 от 2004.06.10), включающий измерение усилий сопротивления двумя прямолинейными зондами с различными коэффициентами аэродинамического сопротивления, размещенными в газовом потоке сопла, определение параметра, характеризующего отношение измеренных двумя зондами усилий, и определение скоростного напора газового потока с использованием предварительно полученных зависимостей параметра от числа М или разницы коэффициентов аэродинамического сопротивления зондов с последующим определением тяги. Измерение усилия сопротивления производят в полете на зондах, отклоненных от перпендикуляра к направлению потока на заданный угол α, определяют параметры, коэффициенты сопротивления зондов и скоростной напор по зависимостям, полученным на земле с зондами, размещенными перпендикулярно направлению газового потока, а тягу определяют по полученному значению скоростного напора, увеличенному в 1/cos2α раз. Кроме того, в устройстве содержатся размещенные в области среза сопла измерительные прямолинейные стержни из жаростойких сплавов, жестко закрепленных одним концом на конструкции сопла с помощью кронштейна и несущие силоизмерительные устройства, связанные выходами с блоком определения тяги. Стержни выполнены переставляемыми в узлах крепления к кронштейнам для обеспечения их поворота в вертикальной плоскости на заданный угол, а блок определения тяги снабжен задатчиком углов установки зондов. Кроме того, устройство снабжено датчиком измерения избыточного статического давления газового потока сопла, приемник статического давления установлен в области измерительных зондов. Устройство содержит блок питания и индикации. Управление устройствами осуществляют с помощью ЭВМ.
Однако недостатком данного способа является необходимость размещения на летательном аппарате (ЛА) дополнительного оборудования, сложной тарировки. Математическое и алгоритмическое обеспечение обработки результатов испытаний отличается большой трудоемкостью выполнения.
Наиболее близким техническим решением, принятым за прототип, является "Метод измерения тяги реактивного двигателя в реальном масштабе времени", патент EP №0342970. А2 от 19 мая 1988 г. В данном методе полная тяга двигателя определяется как разность общей силы, включающей подъемную силу самолета и силу аэродинамического сопротивления с учетом углов атаки и скольжения. Для определения этих составляющих в алгоритме расчетов используется большое количество измеряемых параметров, в том числе и перегрузок, измеряемых с помощью акселерометров.
Существенным недостатком данного метода является большая погрешность, которая обусловлена измерением в полете большого количества параметров, в том числе термодинамических параметров смеси газа: температур, показателей изоэнтропы (адиабаты) (k), газовой постоянной (R), с учетом реального состава газа.
Технической задачей предлагаемого способа является повышение достоверности оценки измерений суммарной тяги двигателей летательного аппарата во время полета.
Технический результат достигается за счет измерения в полете вектора состояния ЛА, использования уравнения движения ЛА в продольной плоскости, инвариантных линейных преобразований измерений для обеспечения условий несмещенности, минимальной дисперсии ошибки, условного экстремума путем введения функции Лагранжа при определении суммарной тяги двигателей по осям X, Y на выделенном небольшом скользящем базовом интервале, содержащем (2l+1) измерений каждого из рассматриваемых параметров, в равноотстоящие моменты времени Δt, на неустановившихся режимах полета для каждого скользящего интервала.
Как известно, в полете на ЛА действуют одновременно силы аэродинамического сопротивления, земного тяготения и тяга двигателей. Для определения тяги двигателей необходимо разделение этих сил.
Для достижения указанного технического результата в способе автоматизированной оценки в полете суммарной тяги двигателей ЛА, проводят комплексные измерения параметров самолетными датчиками продольной  и нормальной
и нормальной  перегрузки в центре масс, скоростного напора qизм(t)=pV2 изм/2, скорости полета ЛА Vизм и плотность воздуха ρ в дискретные равноотстоящие моменты времени Δt. При этом проводят измерения на неустановившихся режимах полета, например, разгон, торможение, в которых скоростной напор воздушного потока изменяется быстро по отношению к исходному в балансировочном режиме. В качестве исходного балансировочного полета принимают горизонтальный полет на заданной высоте, определяют оценку суммарной тяги, используя аэродинамические соотношения вектора состояния летательного аппарата, уравнение движения ЛА в продольной плоскости, по осям координат X, Y с помощью БЦВМ, для этого обеспечивают автоматизированный цифровой анализ путем последовательного считывания каждой кривой измерений с небольшого скользящего базового интервала (СБИ), включающего (2l+1) измерений, каждого из рассматриваемых параметров, определяют значения проекций вектора тяги по осям координат X, Y в виде:
перегрузки в центре масс, скоростного напора qизм(t)=pV2 изм/2, скорости полета ЛА Vизм и плотность воздуха ρ в дискретные равноотстоящие моменты времени Δt. При этом проводят измерения на неустановившихся режимах полета, например, разгон, торможение, в которых скоростной напор воздушного потока изменяется быстро по отношению к исходному в балансировочном режиме. В качестве исходного балансировочного полета принимают горизонтальный полет на заданной высоте, определяют оценку суммарной тяги, используя аэродинамические соотношения вектора состояния летательного аппарата, уравнение движения ЛА в продольной плоскости, по осям координат X, Y с помощью БЦВМ, для этого обеспечивают автоматизированный цифровой анализ путем последовательного считывания каждой кривой измерений с небольшого скользящего базового интервала (СБИ), включающего (2l+1) измерений, каждого из рассматриваемых параметров, определяют значения проекций вектора тяги по осям координат X, Y в виде:

причем для определения указанных значений Рx(t) и Рy(t) вводят при обработке измерений скользящий базовый интервал (СБИ), содержащий (2·l+1) (обычно l≤5), измерений каждого из рассматриваемых параметров такого, что


где  ,
,  - коэффициенты сил лобового сопротивления и подъемной силы в скоростной системе координат, α - угол атаки,
- коэффициенты сил лобового сопротивления и подъемной силы в скоростной системе координат, α - угол атаки,
m - масса ЛА, g - ускорение силы тяжести, S - площадь крыла,
Сx, Cy - коэффициенты аэродинамических сил лобового сопротивления и подъемной силы в связанных осях координат, εx, εy - случайные ошибки;
полученные изменения тяги двигателя на интервале [t-j,tj] представляют в виде:


где Rx(t), Ry(t) - остаточный член разложения тяги в ряд по степеням t, результаты измерений на СБИ для упрощения вычислений представляют в матричном виде:


где Т - операция транспонирования


в расчеты вводят вектор неизвестных коэффициентов в соответствии со способом инвариантной фильтрации, умножают данные выражения на вектор неизвестных коэффициентов  накладывают на выбор элементов вектора β следующие условия:
накладывают на выбор элементов вектора β следующие условия:
- инвариантности QTβ=0,
-несмещенности: 
 где
где  и
и  - значения сил тяги двигателей в средней точке СБИ,
- значения сил тяги двигателей в средней точке СБИ,
- минимума дисперсии ошибки 

а оценку β определяют путем решения задачи на условный экстремум введением функции Лагранжа:

где λ0…λk - множители Лагранжа,
определяют коэффициенты  из условия минимума функции Лагранжа:
из условия минимума функции Лагранжа:



для снижения дисперсии принимают:


затем вычисляют оценку значений составляющих вектора тяги по осям X, Y в каждой точке СБИ:


определяют величину суммарной тяги двигателя:
и угол между вектором Р∑ и продольной осью самолета:
 где
где 


λ0…λk+1 - множители Лагранжа.
Предлагаемый способ поясняется фиг.1 и 2.
На фиг.1 представлена структурная схема алгоритма расчета суммарной тяги двигателя.
На фиг.2 представлен график изменения параметров аэродинамического напора и других измеряемых параметров 1 в скользящем базовом интервале 2, содержащем (2·l+1) измерений времени (t-l…t0…tl) 3.
На фиг.3, 4, 5, 6 представлены графики измеренных параметров скорости полета vm/s, угла атаки αgrad, величин перегрузок по осям X, Y ny, nx (1, 4, 5, 6) в течение 100 с интервала времени при заданной тяге Р=1968 кГс.
На фиг.7 показаны результаты расчета суммарной тяги двигателя P∑ в течение 100 с полета.
Способ осуществляется следующим образом:
Способ определения тяги двигателя по результатам измерения в полете вектора состояния ЛА использует уравнения движения ЛА в продольной плоскости, инвариантные линейные преобразования измерений (см. фиг.1)

где Рx и Рy - проекции вектора тяги на связанные оси координат X, Y, которые определяются в виде:


Проекции вектора тяги на оси X, Y в зависимости от времен t выражаются в виде:


где 
 qизм - измеренные значения, содержащие случайные ошибки εx, εy.
qизм - измеренные значения, содержащие случайные ошибки εx, εy.
Измерения выполняются в дискретные равноотстоящие моменты времени ti(i=l…N) с шагом h=Δt (см. фиг.2). В результатах измерений выделяется скользящий базовый интервал (СБИ), содержащий (2·l+1) (обычно l≤5) измерение, отсчет времени выполняется от его середины  Тогда уравнение для каждой точки СБИ в матричных обозначениях будет:
Тогда уравнение для каждой точки СБИ в матричных обозначениях будет:


где



На небольшом скользящем базовом интервале C=const для каждого скользящего интервала. При матричном транспонировании указанных выражений получим:
Вводя в рассмотрение вектор неизвестных коэффициентов  и умножая справа каждые члены уравнений на вектор β, получим:
и умножая справа каждые члены уравнений на вектор β, получим:


На выбор элементов вектора β наложим условия инвариантности QTβ=0 и несмещенности:

 где
где  и
и  - значения сил тяги двигателей в средней точке СБИ.
- значения сил тяги двигателей в средней точке СБИ.
Изменения тяги двигателя на интервале [t-j,tj] может быть приближенно представлено в виде разложения в ряд Тейлора:




где Rx(t), Ry(t) - остаточные члены разложения.
Для скользящего базового интервала условие несмещенности представляется в виде:


Приравнивая выражения при коэффициентах α в левой и правой частях данного выражения, найдем:

К этим условиям добавим условие инвариантности:

На выбор β накладывается условие минимума дисперсии 

Определение оценки  является решением задачи Лагранжа с введением в рассмотрение функции Лагранжа
является решением задачи Лагранжа с введением в рассмотрение функции Лагранжа 

Получаем значения сил тяги двигателей в средней точке СБИ:


где 


λ0…λk+1 - множители Лагранжа.
Величина суммарной тяги двигателей вычисляется как:

Угол между вектором Рx и продольной осью самолета (направление вектора тяги) определяют в виде:
Пример
Для измерения суммарной тяги двигателей летательных аппаратов осуществляют измерение параметров в полете. На фиг.2-6 представлены графики измеренных параметров qm, vm/s, αgrad, ny, nx (1, 4, 5, 6) в течение 100 с интервала времени при заданной тяге Р=1968 кГс. С помощью БЦВМ обеспечивают автоматизированный цифровой анализ путем последовательного считывания каждой кривой измерений с небольшого скользящего базового интервала, включающего (2l+1) измерения. Рассчитывают суммарную тягу двигателей по алгоритму, приведенному на фиг.1. Результаты расчета суммарной тяги показаны на графике (см. фиг.7). Сравнение значений заданной и расчетной тяги Р∑ показывает на удовлетворительную оценку сходимости результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ КОЭФФИЦИЕНТОВ C И С НА ОСНОВЕ ОПРЕДЕЛЕНИЯ СУММАРНОЙ ТЯГИ ДВИГАТЕЛЬНОЙ УСТАНОВКИ ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2503941C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ИСПЫТАНИЙ | 2009 |
|
RU2419775C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА ВЕКТОРА СИЛЫ ТЯГИ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ С КОСЫМ СРЕЗОМ СОПЛА ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЕГО НА ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ | 2010 |
|
RU2445599C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СИЛЫ ТЯГИ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ С КОСЫМ СРЕЗОМ СОПЛА ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЕГО НА ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ | 2006 |
|
RU2314503C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛЫ ТЯГИ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЕГО НА ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ | 2006 |
|
RU2324156C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ПРИ ИЗМЕНЕНИИ РЕЖИМА РАБОТЫ ДВИГАТЕЛЕЙ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601367C1 |
| Способ определения углов атаки и скольжения беспилотного летательного аппарата | 2022 |
|
RU2792261C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2579796C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2347193C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2582492C1 |
Изобретение относится к области авиации, а именно к системам проведения летных исследований летательных аппаратов (ЛА) для измерения суммарной тяги их двигателей. Способ включает определение в полете суммарной силы тяги двигателей ЛА путем измерения самолетными датчиками скорости полета ЛА в дискретные равноотстоящие моменты времени, измерений продольной и нормальной перегрузок, скоростного напора. При этом проводят измерения на неустановившихся режимах полета, в которых скоростной напор воздушного потока изменяется быстро по отношению к исходному в балансировочном режиме. В качестве исходного балансировочного полета принимают горизонтальный полет на заданной высоте. Определяют оценку суммарной тяги, используя аэродинамические соотношения вектора состояния летательного аппарата, уравнение движения ЛА в продольной плоскости, по осям координат X, Y с помощью ЭВМ. Технический результат заключается в повышении достоверности оценки измерений суммарной тяги двигателей летательного аппарата во время полета. 7 ил.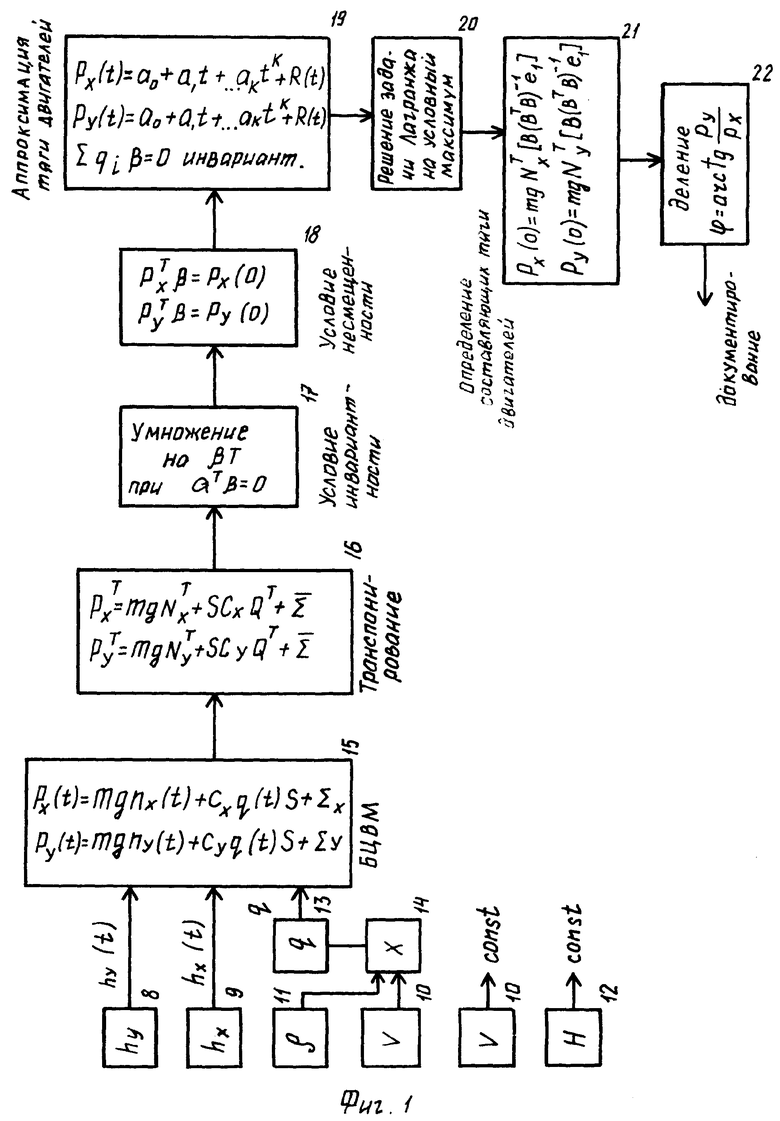
Способ автоматизированной оценки в полете суммарной тяги двигателей летательного аппарата (ЛА), включающий измерения самолетными датчиками - акселерометрами продольной  и нормальной
и нормальной  перегрузок в центре масс летательного аппарата, скоростного напора q, скорости полета V ЛА в дискретные равноотстоящие моменты времени Δt, отличающийся тем, что проводят комплекс измерений продольной
перегрузок в центре масс летательного аппарата, скоростного напора q, скорости полета V ЛА в дискретные равноотстоящие моменты времени Δt, отличающийся тем, что проводят комплекс измерений продольной  и нормальной
и нормальной  перегрузок, скоростного напора
перегрузок, скоростного напора  на неустановившихся режимах полета, в которых скоростной напор воздушного потока изменяется быстро по отношению к исходному в балансировочном режиме, в качестве которого принимают горизонтальный полет на постоянной высоте и средней скорости для этих высот, затем, используя аэродинамические соотношения с учетом случайной погрешности ε, обеспечивают автоматизированный цифровой анализ с помощью бортовой цифровой вычислительной машины путем последовательного считывания каждой кривой измерений с небольшого скользящего базового интервала (СБИ), включающего 2l+1 измерений, каждого из рассматриваемых параметров, определяют значения проекций вектора тяги по осям координат X, Y из следующих соотношений:
на неустановившихся режимах полета, в которых скоростной напор воздушного потока изменяется быстро по отношению к исходному в балансировочном режиме, в качестве которого принимают горизонтальный полет на постоянной высоте и средней скорости для этих высот, затем, используя аэродинамические соотношения с учетом случайной погрешности ε, обеспечивают автоматизированный цифровой анализ с помощью бортовой цифровой вычислительной машины путем последовательного считывания каждой кривой измерений с небольшого скользящего базового интервала (СБИ), включающего 2l+1 измерений, каждого из рассматриваемых параметров, определяют значения проекций вектора тяги по осям координат X, Y из следующих соотношений:


причем для определения указанных значений Px(t) и Py(t) вводят при обработке измерений скользящий базовый интервал (СБИ), содержащий 2·l+1 (обычно l≤5), измерений каждого из рассматриваемых параметров такого, что


где 
 - коэффициенты сил лобового сопротивления и подъемной силы приведены в скоростной системе координат; α - угол атаки; m - масса ЛА; g - ускорение силы тяжести; S - площадь крыла; Cx, Cy - коэффициенты аэродинамических сил лобового сопротивления и подъемной силы в связанных осях координат εx, εy - случайные ошибки,
- коэффициенты сил лобового сопротивления и подъемной силы приведены в скоростной системе координат; α - угол атаки; m - масса ЛА; g - ускорение силы тяжести; S - площадь крыла; Cx, Cy - коэффициенты аэродинамических сил лобового сопротивления и подъемной силы в связанных осях координат εx, εy - случайные ошибки,
полученные изменения тяги двигателя на интервале [t-j,tj] представляют в виде:


где Rx(t), Ry(t) - остаточный член разложения тяги в ряд по степеням k, результаты измерений на СБИ для упрощения вычислений представляют в матричном виде:


где T - операция транспонирования


в расчеты вводят вектор неизвестных коэффициентов в соответствии со способом инвариантной фильтрации, умножают данные выражения на вектор неизвестных коэффициентов  накладывают на выбор элементов вектора β следующие условия:
накладывают на выбор элементов вектора β следующие условия:
инвариантности QTβ=0,
несмещенности: 
 где
где  и
и  - значения сил тяги двигателей в средней точке СБИ,
- значения сил тяги двигателей в средней точке СБИ,
минимума дисперсии ошибки 

а оценку β определяют путем решения задачи на условный экстремум введением функции Лагранжа

где λ0…λk - множители Лагранжа,
определяют коэффициенты  из условия минимума функции Лагранжа:
из условия минимума функции Лагранжа:



для снижения дисперсии принимают:

затем вычисляют оценку значений составляющих вектора тяги по осям X, Y в каждой точке СБИ:


определяют величину суммарной тяги двигателя
и угол между вектором PΣ и продольной осью самолета

где 


λ0…λk+1 - множители Лагранжа.
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОСТАНОВА ТКАЦКОГО СТАНКА ПРИ ОБРЫВЕ УТОЧНОЙ НИТИ | 0 |
|
SU342970A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ СОПЛА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ В ПОЛЁТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2230302C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЯГИ В ПОЛЕТЕ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ (ГПВРД) НЕПИЛОТИРУЕМОЙ ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ (ГЛЛ) | 2003 |
|
RU2242736C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СИЛЫ ТЯГИ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ С КОСЫМ СРЕЗОМ СОПЛА ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЕГО НА ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ | 2006 |
|
RU2314503C1 |

